Устройство для предотвращения непрограммных движений управляемых механизмов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1686695
Автор: Комиссаров



Текст
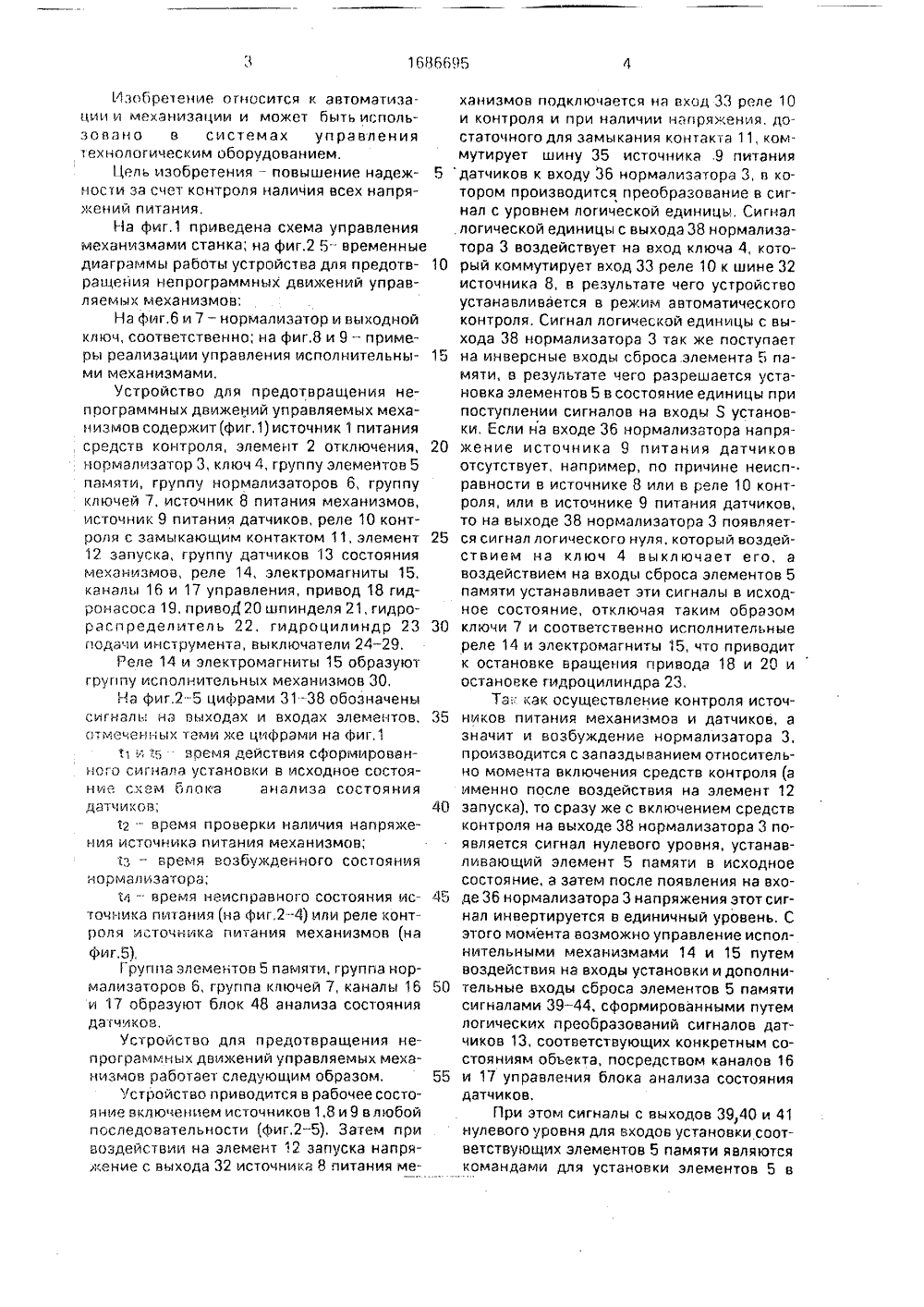
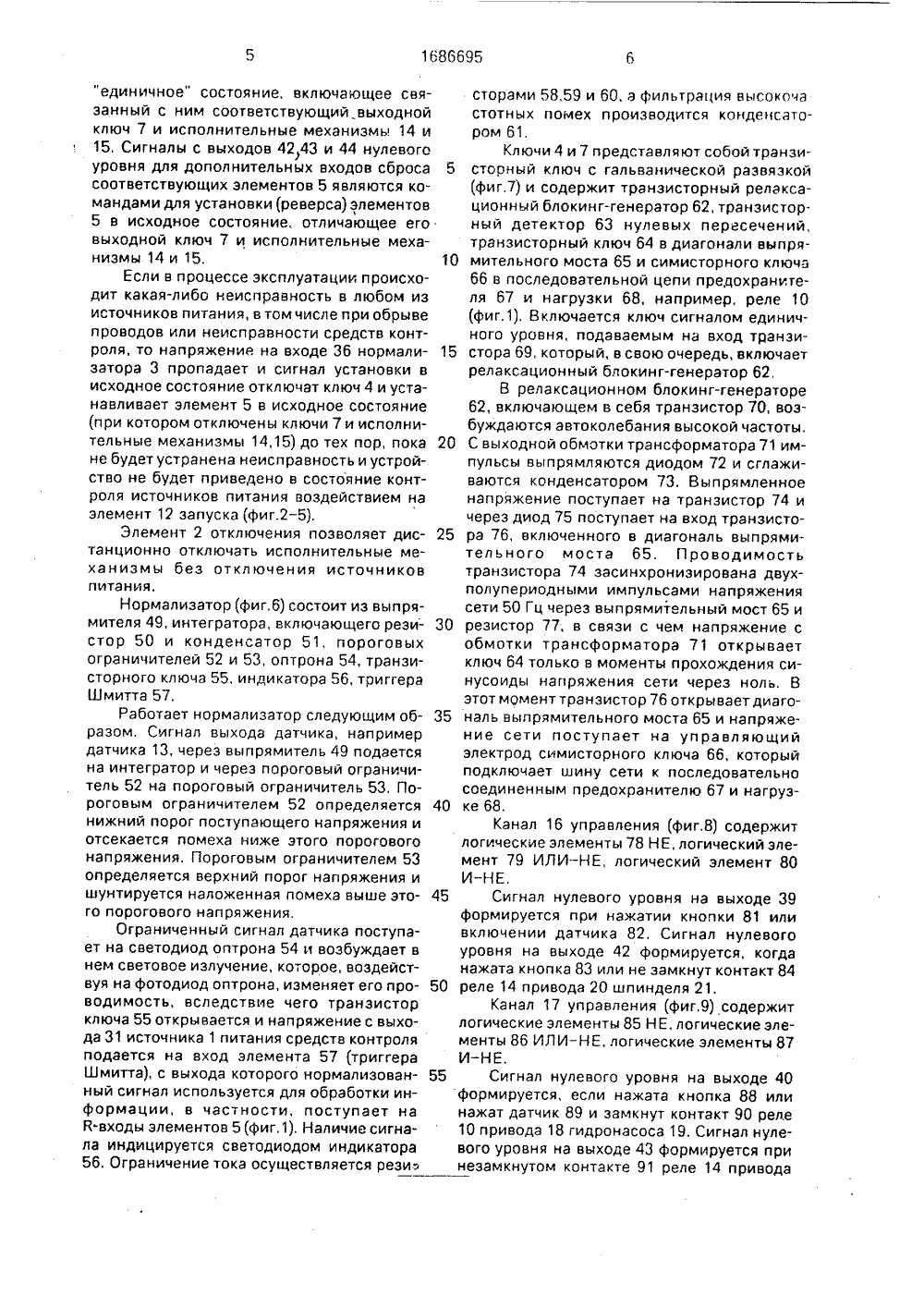
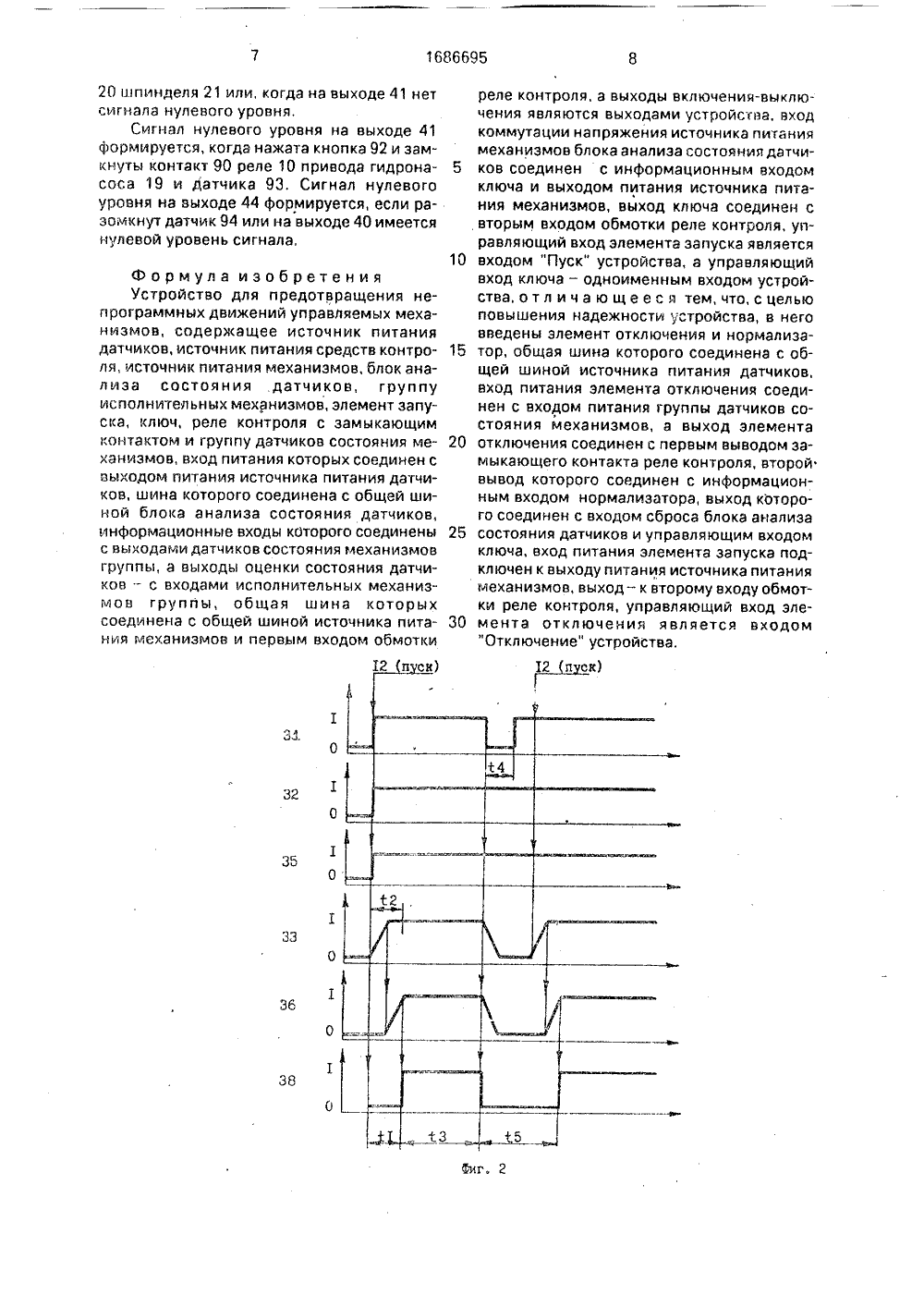
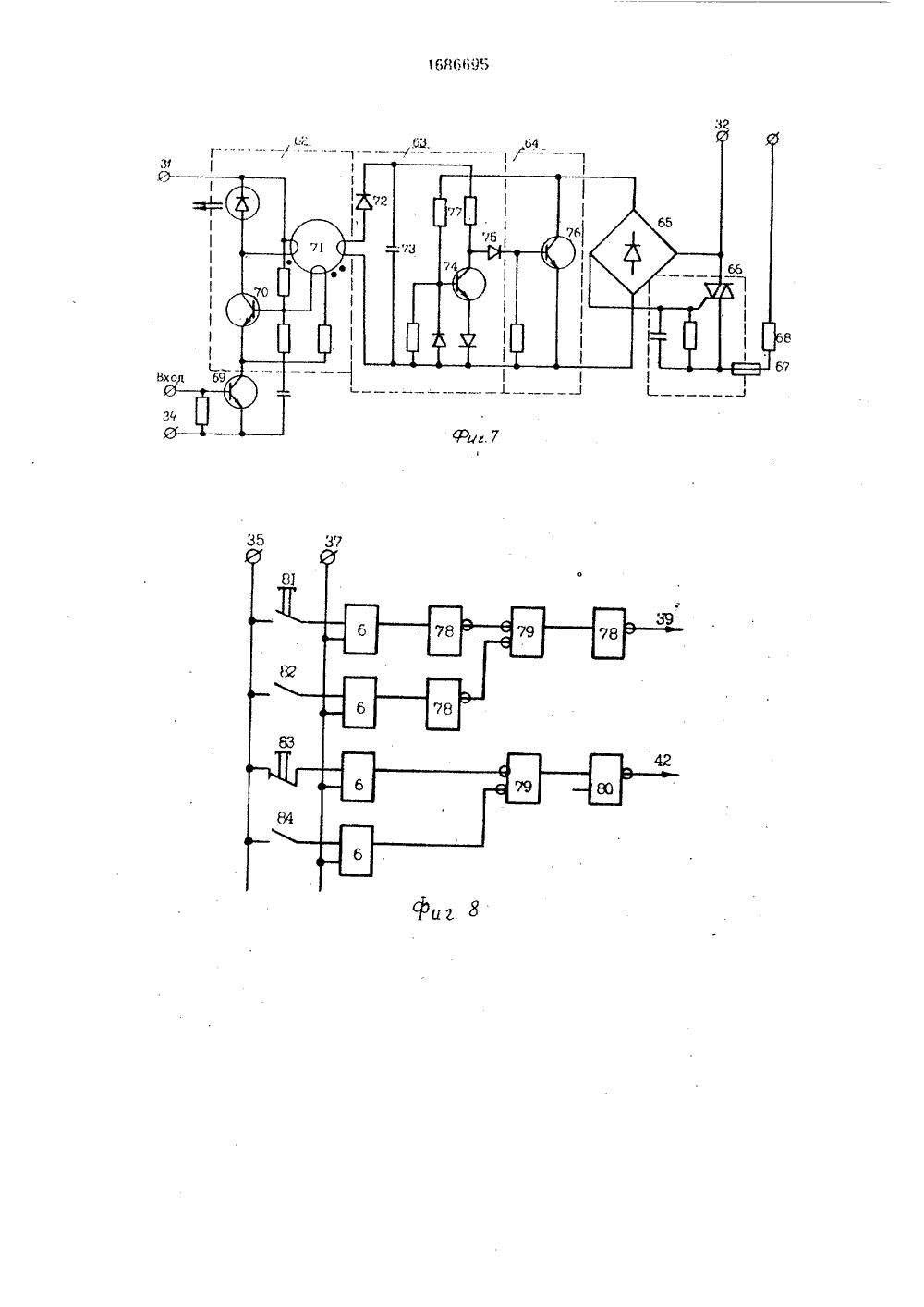
(9 5) с Н 03 К 3/286 ИЕ ИЗОБРЕТЕН ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР К АВТОРСКОМУ СВИДЕТЕЛЬСТВ(71) Тольяттинское отделение Института электронных управляющих машин(56) Белогородский С.Л. Автомеханизация управления посадкой самолета, - М.: Транспорт, 1972, с, 298,299, рис. 4.5.2.Авторское свидетельство СССР М 873390, кл. Н 03 К 3/286, 1978.(54) УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ НЕПРОГРАММНЫХ ДВИЖЕНИЙ УПРАВЛЯЕМЫХ МЕХАНИЗМОВ (57) Изобретение относится к автоматизации и механизации и может быть использовано в системах управления технологическим оборудованием, Цель изобретения - упрощение устройства, Устройство содержит источник 1 питания средств контроля, элемент 2 отключения, нормализатор 3, ключ 4, группу элементов 5 памяти, группу нормализаторов б, группу ключей 7, источник 8 питания механизмов, источник 9 питаг ния датчиков, реле 10 контроля с замыкающим контактом 11, элемент запуска 12, датчики 13 параметров, реле 14, электромагниты 15, каналы управления 16 и 17. Принцип действия устройства заключается в кратковременном воздействии на элемент запуска 12, в результате чего при исправном источнике питания механизмов источник питания датчиков подключается к нормализатору, который анализирует его исправность и при положительном исходе анализа устанавливает единичный сигнал на входе сброс блока анализа состояния датчиков, что является сигналом перевода этого блока в режим контроля, а также замь)кает ключ 4 и тем самым подключает напряжение питания источника питания механизмов к второму входу обмотки реле 10. Это, в свою очередь, приводит к подключению силового напряжения к оборудованию, При нарушении работы какого-либо источника питания происходит отключение как силового напряжения, так и напряжения источника питания механизмов от оборудования, что обеспечивает безопасное функционирование устройства, 9 ил.Изобре 1 ение относится к автоматизации и механизации и может быть использовано в системах управленияехнологическим оборудованием,Цель изобретения - повышение надежности за счет контроля наличия всех напряжений питания.На фиг,1 приведена схема управлениямеханизмами станка; на фиг.2 5- временныедиаграммы работы устройства для предотвращения непрограммных движений управляемых механизмов:На фиг.б и 7 - нормализатор и выходнойключ, соответственно; на фиг,8 и 9 примеры реализации управления исполнительными механизмами,Устройство для предотвращения непрограммных движений управляемых механизмов содержит(фиг,1) источник 1 питаниясредств контроля, элемент 2 отключения, 20нормализатор 3, ключ 4, группу элементов 5памяти, группу нормализаторов б, группуключей 7, источник 8 питания механизмов,источник 9 питания датчиков, реле 10 контроля с замыкающим контактом 11, элемент 2512 запус(а, руппу датчиков 13 состояниямеханизмов, реле 14, электромагниты 15,каналы 16 и 17 управления, привод 18 гидронасоса 19, привод 20 шпинделя 21, гидрораспределитель 22, гидроцилиндр 23 30подачи инструмента, выключатели 24 - 29,Реле 14 и электромагниты 15 образуютгруппу исполнительных механизмов 30,На фиг.2-5 цифрами 31-38 обозначенысигналы на выходах и входах элементов, 35Отмеченных теми же цифрами на Фиг,1т; и Ъ время действия сформированного сигнала установки в исходное состояние схем блока анализа состояниядатчиков; 40т 2 - время проверки наличия напряжения источника питания механизмов;з - время возбужденного состояниянормализатора;и - время неисправного состояния источника пигания (на фиг,2 - 4) или реле контроля источника питания механизмов (нафиг.5),Группа элементов 5 памяти, группа нормализаторов 6, группа ключей 7, каналы 16 50и 17 образуют блок 48 анализа состояниядатчиков,Устройство для предотвращения непрограммных движений управляемых механизмов работает следующим образом, 55Устройство приводится в рабочее состояние включением источников 1,8 и 9 влюбойпоследовательности (Фиг,2 - 5), Затем привоздействии на элемент 12 запуска напряжение с выхода 32 источника 8 питания механизмов подключается на вход 33 реле 10 и контроля и при наличии напряжения. достаточного для замыкания контакта 11, коммутирует шину 35 источника .9 питания датчиков к входу Эб нормализатора 3, в котором производится преобразование в сигнал с уровнем логической единицы, Сигнал логической единицы с выхода 38 нормализатора 3 воздействует на вход ключа 4, который коммутирует вход 33 реле 10 к шине 32 источника 8, в результате чего устройство устанавливается в режим автоматического контроля. Сигнал логической единицы с выхода 38 нормализатора 3 так же поступает на инверсные входы сброса элемента 5 памяти, в результате чего разрешается установка элементов 5 в состояние единицы при поступлении сигналов на входы Я установки. Если на входе Зб нормализатора напряжение источника 9 питания датчиков отсутствует, например, по причине неисправности в источнике 8 или в реле 10 контроля, или в источнике 9 питания датчиков, то на выходе 38 нормализатора 3 появляется сигнал логического нуля, который воздействием на ключ 4 выключает его, а воздействием на входы сброса элементов 5 памяти устанавливает эти сигналы в исходное состояние, отключая таким образом ключи 7 и соответственно исполнительные реле 14 и электромагниты 15, что приводит к остановке вращения привода 18 и 20 и остановке гидроцилиндра 23.Таг как Осуществление контроля источников питания механизмов и датчиков, а значит и возбуждение нормализатора 3, производится с запаздыванием относительно момента включения средств контроля (а именно после воздействия на элемент 12 запуска), то сразу же с включением средств контроля на выходе 38 нормализатора 3 появляется сигнал нулевого уровня, устанавливающий элемент 5 памяти в исходное состояние, а затем после появления на входе Зб нормализатора 3 напряжения этот сигнал инвертируется в единичный уровень. С этого момента возможно управление исполнительными механизмами 14 и 15 путем воздействия на входы установки и дополнительные входы сброса элементов 5 памяти сигналами 39 - 44, сформированными путем логических преобразований сигналов датчиков 13, соответствующих конкретным состояниям объекта, посредством каналов 16 и 17 управления блока анализа состояния датчиков.При этом сигналы с выходов 39,40 и 41 нулевого уровня для входов установки соответствующих элементов 5 памяти являются командами для установки элементов 5 в"единичное" состояние, включающее связанный с ним соответствующий. выходной ключ 7 и исполнительные механизмы 14 и 15, Сигналы с выходов 4243 и 44 нулевого уровня для дополнительнйх входов сброса соответствующих элементов 5 являются командами для установки (реверса) элементов 5 в исходное состояние, отличающее его выходной ключ 7 и исполнительные механизмы 14 и 15.Если в процессе эксплуатации происходит какал-либо неисправность в любом из источников питания, в том числе при обрыве проводов или неисправности средств контроля, то напряжение на входе 36 нормали- затора 3 пропадает и сигнал установки в исходное состояние отключат ключ 4 и устанавливает элемент 5 в исходное состояние (при котором отключены ключи 7 и исполнительные механизмы 14,15) до тех пор, пока не будет устранена неисправность и устройство не будет приведено в состояние контроля источников питания воздействием на элемент 12 запуска (фиг.2 - 5).Элемент 2 отключения позволяет дистанционно отключать исполнительные механизмы без отключения источников питания.Нормализатор (фиг.6) состоит из выпрямителя 49, интегратора, включающего рези- стор 50 и конденсатор 51, пороговых ограничителей 52 и 53, оптрона 54, транзисторного ключа 55, индикатора 56, триггера Шмитта 57,Работает нормализатор следующим образом, Сигнал выхода датчика, например датчика 13, через выпрямитель 49 подается на интегратор и через пороговый ограничитель 52 на пороговый ограничитель 53, Пороговым ограничителем 52 определяется нижний порог поступающего напряжения и отсекается помеха ниже этого порогового напряжения. Пороговым ограничителем 53 определяется верхний порог напряжения и шунтируется наложенная помеха выше этого порогового напряжения,Ограниченный сигнал датчика доступает на светодиод оптрона 54 и возбуждает в нем световое излучение, которое, воздействуя на фотодиод оптрона, изменяет его проводимость, вследствие чего транзистор ключа 55 открывается и напряжение с выхода 31 источника 1 питания средств контроля подается на вход элемента 57 (триггера Шмитта), с выхода которого нормализованный сигнал используется для обработки информации, в частности, поступает на В.входы элементов 5 (фиг.1). Наличие сигнала индицируется светодиодом индикатора 56, Ограничение тока осуществляется рези сторами 58,59 и 60, а фильтрация высокоча статных помех производится конденсатором 61,Ключи 4 и 7 представляют собой транзисторный ключ с гальванической развязкой (фиг,7) и содержит транзисторный релаксационный блокинг-генератор 62, транзисторный детектор 63 нулевых пересечений, транзисторный ключ 64 в диагонали выпрямительного моста 65 и симисторного ключа66 в последовательной цепи предохранителя 67 и нагрузки 68, например, реле 10 (фиг.1), Включается ключ сигналом единичного уровня, подаваемым на вход транзистора 69, который, в свою очередь, включает релаксационный блокинг-генератор 62,В релаксационном блокинг-генераторе 62, включающем в себя транзистор 70, возбуждаются автоколебания высокой частоты, С выходной обмотки трансформатора 71 импульсы выпрямляются диодом 72 и сглаживаются конденсатором 73. Выпрямленное напряжение поступает на транзистор 74 и через диод 75 поступает на вход транзистора 76, включенного в диагональ выпрями- тельного моста 65. Проводимость транзистора 74 засинхронизирована двухполупериодными импульсами напряжения сети 50 Гц через выпрямительный мост 65 и резистор 77, в связи с чем напряжение с обмотки трансформатора 71 открывает ключ 64 только в моменты прохождения синусоиды напряжения сети через ноль, В этот момент транзистор 76 открывает диагональ выпрямительного моста 65 и напряжение сети поступает на управляющий электрод симисторного ключа 66, который подключает шину сети к последовательно соединенным предохранителю 67 и нагрузке 68.Канал 16 управления (фиг,8) содержит логические элементы 78 НЕ, логический элемент 79 ИЛИ - НЕ, логический элемент 80 И - НЕ.Сигнал нулевого уровня на выходе 39формируется при нажатии кнопки 81 или включении датчика 82. Сигнал нулевогоуровня на выходе 42 формируется, когда нажата кнопка 83 или не замкнут контакт 84 реле 14 привода 20 шпинделя 21,Канал 17 управления (фиг,9) содержитлогические элементы 85 НЕ, логические элементы 86 ИЛИ-НЕ, логические элементы 87 И - НЕ.Сигнал нулевого уровня на выходе 40формируется, если нажата кнопка 88 илинажат датчик 89 и замкнут контакт 90 реле 10 привода 18 гидронасоса 19. Сигнал нулевого уровня на выходе 43 формируется при незамкнутом контакте 91 реле 14 привода20 шпинделя 21 или, когда на выходе 41 нет сигнала нулевого уровня,Сигнал нулевого уровня на выходе 41 формируется, когда нажата кнопка 92 и замкнуты контакт 90 реле 10 привода гидронасоса 19 и датчика 93. Сигнал нулевого уровня на выходе 44 формируется, если разомкнут датчик 94 или на выходе 40 имеется нулевой уровень сигнала,Формула изобретения Устройство для предотвращения не- программных движений управляемых механизмов, содержащее источник питания датчиков, источник питания средств контроля, источник питания механизмов, блок анализа состояния .датчиков, группу исполнительных механизмов, элемент запуска, ключ, реле контроля с замыкающим контактом и группу датчиков состояния механизмов, вход питания которых соединен с выходом питания источника питания датчиков, шина которого соединена с общей шиной блока анализа состояния датчиков, информационные входы которого соединены с выходами датчиков состояния механизмов группы, а выходы оценки состояния датчиков - с входами исполнительных механизмов группы, общая шина которых соединена с общей шиной источника питания механизмов и первым входом обмотки реле контроля, а выходы включения-выключения являются выходами устройства. вход коммутации напряжения источника питания механизмов блока анализа состояния датчи ков соединен с информационным входомключа и выходом питания источника питания механизмов, выход ключа соединен с вторым входом обмотки реле контроля, управляющий вход элемента запуска является 10 входом "Пуск" устройства, а управляющийвход ключа - одноименным входом устройства, от л и ч а ю ще е с я тем, что, с целью повышения надежности устройства, в него введены элемент отключения и нормализа тор, общая шина которого соединена с общей шиной источника питания датчиков, вход питания элемента отключения соединен с входом питания группы датчиков состояния механизмов, а выход элемента 20 отключения соединен с первым выводом замыкающего контакта реле контроля, второй вывод которого соединен с информационным входом нормализатора, выход которого соединен с входом сброса блока анализа 25 состояния датчиков и управляющим входомключа, вход питания элемента запуска подключен к выходу питания источника питания механизмов, выход - к второму входу обмотки реле контроля, управляющий вход эле мента отключения является входом1685595 Редактор М. Янкави черява ри ГКНТ СССР Производственно-издательский комбинат "патент", г, Ужгород, ул Гагарина, 101 каз 3611 ВНИИП Составитель В. ГришинТехред Ы.Моргентал Корректор Тираж Подписноеосударственного комитета до изобретениям и открытив 113035, Москва, Ж, Рауозская наб 4(5
СмотретьЗаявка
4709452, 23.06.1989
ТОЛЬЯТТИНСКОЕ ОТДЕЛЕНИЕ ИНСТИТУТА ЭЛЕКТРОННЫХ УПРАВЛЯЮЩИХ МАШИН
КОМИССАРОВ СТАНИСЛАВ ГЕОРГИЕВИЧ
МПК / Метки
МПК: H03K 3/286
Метки: движений, механизмов, непрограммных, предотвращения, управляемых
Опубликовано: 23.10.1991
Код ссылки
<a href="https://patents.su/8-1686695-ustrojjstvo-dlya-predotvrashheniya-neprogrammnykh-dvizhenijj-upravlyaemykh-mekhanizmov.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для предотвращения непрограммных движений управляемых механизмов</a>
Бесконтактное тепловое реле-датчик

Номер патента: 117439
Опубликовано: 01.01.1958
Автор: Дадунашвили
МПК: H01H 37/58, H01H 71/14
Метки: бесконтактное, реле-датчик, тепловое
...если он изготовлен из антиферромагнетика.117439Если стержень 2 изготовлен из термомагнитного сплава, то э,д,с. в об. мотке 4 будет плавно изменяться с изменением температуры.Таким образом, тепловое реле-датчик со стержнем 2 из ферромагнетика выполняет функции реле с нормально закрытыми контактами и автономным источником питания, а при антиферромагнитном стержне 2 роль реле - с нормально открытыми контактами. При выполнении степжня 2 из термомагнитного сплава тепловое реле-датчик может быть использовано для регулирования и измерения температуры.В сердечнике устройства может быть применен третий стержень 7 (фиг. 2), выполненный из материала, аналогичного стержню 1, с размещенными на нем двумя обмотками 8 и 9. Обмотка 8 имитирует...
Устройство для выполнения операции “конъюнкции на три входа” на ферритферритовых логических элементах

Номер патента: 966910
Опубликовано: 15.10.1982
Авторы: Мингалеев, Пластун, Солдатов
МПК: H03K 19/16
Метки: входа, выполнения, конъюнкции, логических, операции, три, ферритферритовых, элементах
...этом на выходе элемента 5появляется сигнал, однозначно соответствующийй входной комбинации сигналов,При подаче двоичного кода на входныешины 1-3 устройства "1" представляется сигналом положительной полярности,а "0" - отсутствием сигнала,Система тактового питания устройства - трехфазная, при этом входнаякомбинация сигналов на шины 1-3 эле ментов 4 и 5 поступает через три фазы (один такт) передачи информации поэлементам схемы (фиг. 2) .Тактовым импульсом, второй фазы считывается информация с элемента 4 атретьей фазы - с элемента 5, Импульсы поступают на шины 1-3 элементов 4и 5 во время тактового импульса первой фазы. Первая шина тактового питания (фаза 1) соединена с четвертым входом элемента 4, а вторая шина тактового питания (фаза 2)...
Устройство для сортировки кусков губчатого титана

Номер патента: 1443981
Опубликовано: 15.12.1988
Авторы: Власов, Журавков, Шуньков
МПК: B03B 13/06, B07C 5/342
Метки: губчатого, кусков, сортировки, титана
...синхронизирующих ключей 26 и 27, размыкая их, и на вход синхронизации (С-вход) 0-триггера 9,При обкатывании Куска электродами- валками образуется в общем случае и пар контактных площадок (участков), в которых кусок соприкасается одновременно с поверхностями горячего 3 и холодного 4 электродов. При каждом таком одновременном контакте, между куском и горячим электродом 3 возникает термоЭДС, величина которой при постоянной разнице их температур зависит только от состава и состояния контролируемых участков поверхности куска, ТермоЭДС с каждой пары контроК = 2 Р здп (д/2) и удерживающих (И) сил, которые явля 45ются проекциями сил трения (Т) на ось,параллельную направлению силы К,(2)(4) Б = Р й соя (оС/2) На кусок губчатого титана,...
Устройство для сигнализации и управления двухпозиционным исполнительным механизмом

Номер патента: 1559360
Опубликовано: 23.04.1990
Авторы: Геллер, Козырь, Тарнавский
МПК: G08B 23/00
Метки: двухпозиционным, исполнительным, механизмом, сигнализации
...на выходе 7 устройства появляется сигнал воздействия на исполнительный механизм. Этот же30 сигнал поступает на вход элемента 4 памяти и запоминается. Исполнительный механизм начинает отрабатывать команду "Закрыть", с шины 22 сигналов положения исполнительного механизма снимается сигнал, и индикатор 9 отключается, При достижении исполнительным механизмом положения "Закрыт" появляется сигнал на шине 23 сигналов положения исполнительного механизма, и индикатор 10, подключенный через элемент ИЛИ .15 и шину 23 сигналов положения исполнительного механизма, начинает светиться ровным светом. Одновременно происходит сброс элемента 4 памяти.нЕсли при выполнении команды Открыть но истечении установленного времени исполнительный механизм не...
Устройство для контроля и сигнализации высоты полета самолета

Номер патента: 1817125
Опубликовано: 23.05.1993
Авторы: Бабич, Сычев, Фетахдинов, Чистов
МПК: G08G 5/00
Метки: высоты, полета, самолета, сигнализации
...выходов блока 19 памяти, при отказе систем типа СВС-72 - 1 и пропадании сигналов исправности; поступающих на третий РК 1, четвертый РК 2 и пятый РКЗ входы устройства, на индикаторах 23,25 обеспечивается сигнализация отказа соответствующего подканала или датчика высоты, Рассмотренный выше 5 контроль и сигнализация позволяет исключить ошибки экипажа при установке на датчиках высоты давление земли Рз, равное давлению в настоящий момент на аэродроме посадки. Кроме того, в данном устройстве осуществляется контроль установки давления земли Рз = 760 мм рт, ст., которое экипаж обязан выставить в режиме взлета, что также повышает безопасность пилотирования и исключает ошибки экипажа, При установке давления земли, равного 760 мм рт, ст на...
Предыдущий патент: Транзисторный фазоинвертор
Следующий патент: Устройство для управления поляризованным электромагнитным реле
Случайный патент: Способ выщелачивания гетитсодержащих бокситов