Система управления положением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
(21) 4327001/24-24 (22) 27,07,87 (46) 07.10.89. Бюл (71) Донецкий поли вход первого интегратора и с еговыхода - на вход второго интегратора. Выходной сигнал второго интегртора поступает на вход регулятораположения, в котором сравниваетсяс выходным сигналом датчика положения и суммируется с выходными сигналами компаратора и первого интегратора, Выходной сигнал регулятораположения сравнивается в регуляторе скорости с выходным сигналомдатчика скорости и суммируетсясигналом с выхода компаратора. Выходкой сигнал регулятора скоростиусиливается, ограничивается и вдатчике тока сравнивается с выходным сигналом датчика тока, выходнойсигнал регулятора тока усиливаетсяпо мощности и поступает ыа вход анст техническ ут ство СССР01, 1980,во СССР1, 1979.ромеханителя. Выходные сигналы регуляскорости и усилителя-ограничисравниваются и поступают на порогового устройства, выходной ал которого подается на управлявходы ключей, которые отключа- од первого интегратора от выхомпаратора и вход второго интегот вьйода первого интегракачестве регуляторов приме- -регулирующие блоки. 5 ил. тор теля вход сиги в ратора -тора. Вняются ПИ может я по- ных еньшение одействия иости системы1 представл шение быс лебател На фиг блок-схе - диагра станов. иг. ма системы; ГОСУДАРСТНЕННЬ 1 Й НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ГННТ СССР(56) Авторское свидетельУ 924662, кл. С 05 В 11/Авторское свидетельст Р 840789, кл. С 05 В 5/ОИзвестия вузов "Элект ка", 1982, Р 3, с. 33 1-337. (54) СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ (57) Изобретение относится к металлургии и машиностроению и может быть использовано для управления положением нажимных винтов прокатных станов. Цель изобретения - повышение быстродействия и уменьшение колебательности системы. Поставленная цель достигается за счет того, что входной сигнал системы сравнивается с выходным сигналом второго интегратора и из полученной разности извлекается квадратный корень. Результат сравнивается в компараторе с выходным сигналом первого интегратора и полученный результат поступает на Изобретение относится к обласеталпургии и машиностроению иыть использовано для управлениожением нажимных винтов прокат зобретения является повы31513415изменения сигналов задающего устройства при работе системы по соответственно треугольной и трапецеидальной тахограммам; на фиг. 4 и 5графики переходных процессов всистеме при отработке заданного перемещения при отсутствии токоограничения и его наличии соответственно.Система содержит задающее устройство 1, источник 2 входного сигнала,нелинейный блок 3, компаратор 4, первый ключ 5, первый интегратор 6, второй ключ 7, второй интегратор 8,контур 9 регулирования положения, 5регулятор 10 положения, регуляторскорости, усилитель-ограничитель 12.регулятор 13 тока, усилитель 14 мощ ности, исполнительный двигатель 15датчики тока 16, скорости 17 и положения 18, блок 19 сравнения, блок20 выделения модуля, компаратор 21,источник 22 опорного сигнала, пороговое устройство 23.На фиг, 2-5 показаны х,(е) - выходной сигнал 1-го блока; К - коэффициент передачи датчика 18 положения; , . - начальное и конечноеположения вала двигателя 15; х - амплитуда выходного сигнала компаратора 4; х - максимальная амплитудавыходного сигнала интегратора б;Я(С) - скорость вращения вала двигателя 15," 1 - ток двигателя 15;заданное перемещение; Ь (1)текущее положение вала двигателя 15;1- максимальное значение токадвигателя 15.В качестве нелинейного блока могут быть использованы релейные блоки 1, 2 ),и блок извлечения квадратного корня 31,Система работает следующим образом,1Для того, чтобы переместить валдвигателя 15 из некоторого начальногозаданного положения Рв конечноенеобходимо выходной сигнал источника2 входного сигнала изменить скачкомна величину х = (ц-) Кр, гдеК - коэффициент передачи датчика 1850Дрположения. Блок 3 осуществляет функцию извлечения квадратного корняиз разности выходных сигналов источника 2 входного сигнала и второгоинтег ато а 8 формирует сигналх = К(х - х 8 и ограничиваетй, 8ной сигнал первого интеграторауровне х 6= х,8. Компаратор 4 выход6 наформирует сигнал х = х зЦп(х- х)ое который при замкнутых ключах 5 и 7 преобразуется первым интегратороме б в воздействие х 8 = К Гхйй,о имеющее форму тр еуг ол ь ника (фиг . 2) илй трапеции (фиг, 3) в зависимости от того, достигают или нет сигналы х и х УРовнЯ ОГРЯничения хр = хрба вторым интегратором 8 - в сигнал Х 8:= к 8 ГХ(,) 1 с, изменяющийся от уровня ХЯ(0) = Кдр ц до уровня хвКр ( нЯ Участках гдех(1) (х по йараболическому закону, а на учясткяху где хб = хоб 1 линейно (фиг. 2). Сигйал хявляется основным управляющим воздействием для контура 9 регулирования положением, а сигналы х и х (е), пропорциональные первой и второй производным от этого воздействия, используются для создания параллельных корректирующих связей по каналу задания, позволяющих повысить быстродействие системы в пускотормозных режимах.Регулятор 10 положения преобразует управляющие воздействия хр, хб, Х 4 и сигнал отрицательной обратной связи по положению х, = Кдрр в сигнал задания на скорость х, , Регулятор 11 скорости преобразует сигнал х, , корректирующее управляющее воздействие х и сигнал отрицательной обратной связи по скорости Сд двигателя 15 х = К Я во входной сигме нал х и для усилителя-ограничителя 12.Усилитель-ограничитель 12 вырабатывает сигнал х если х( хоа)х, = хо если х- хо(1) -х если х , ( -Х 1 - уровень ограничения сигнала задания на ток 1; К - коэффициент усит ления датчика 16 тока 1 щ - максимально допустимый ток якоря" двигателя 15. Блок 19 сравнения формирует на своем выходе разность сигналов х,ц их, -х, =хн-х, . Блок 20 выде-. ления модуля определяет абсолютнуювеличину этой разности х = /х,/, а(2) 5 где х - опорный сигнал, вырабатываемый источником 22 опорного сигнала, представляющим собой устройство типа источниКа опорного 10 напряжения. Источник опорного сигнала 22 необходим для того, чтобы при х = 0 компаратор 21 вырабатывал сигнал х= -хсоответствующий замкнутому состоянию управляе мык ключей 5 и 7,Регуляторы положения 10 и скорости 11 обычно выполняются пропорциональными или пропорционально интегральными в зависимости от требова ний, предъявляемых к системе. Если они имеют пропорциональные характеристики, то их выходные и входные сигналы связаны между собой уравнениями 25 хх,1 е (5)Поэтому выходные сигналы бока 19сравнения х = х- х, и блока 20выделения модуля х = х равны 30 нулю, а второй компаратор 21 поддействием небольшого по величинеопорного сигнала х находится всостоянии, при котором управляющиеключи 5 и 7 замкнуты (х; = хс гх з 1 дп( х ) - х О, ), система отрабатывает заданное перемещениеЬ( == ,. - (фиг. 4).При возрастании статическогомомента М на валу двигателя 15 до 40 такой величины, что условие (4) становится несправедливым, ускорениедвигателя 15 уменьшается (Ес,к ),результирующие входные сигналы регуляторов положения 10 и скорости 11 45 увеличивается что приводит к насыщению усилителя-ограничителя 12 ипереходу системы в режим токоограничения. Этот режим может возникнуть ив начале процесса изменения задающего 50 воздействия, когда двигатель 15 даже при максимально допустимом токеякоря 1 а не вращается (С 3 = 0,из-за того, что МС 1 , Вследмаксствие насыщения усилителя-ограничителя 12 равенство (5) нарушается(уравнение (1 и на выходах блока19 сравнения и блока 20 выделения модуля появляются сигналы, При ххсостояние компаратора 21 изменяется,второй компаратор 21 преобразует ее в сигнал управления хщ ключами 5 иЭ Ху Хс 81 ЯП(Х Х ) р х,о= (ха +Кхб+Кх+ -х 18) Кр,хи = (хю +КР Х 17 ) Крсгде Ки К с - коэффициенты усиления регуляторов положения и скоростисоответственно;К, К, К- коэффициенты передачи по сигналам параллельных корректирующих связей,Если регулятор 11 скорости имеет пропорционально интегральную характеристику, то его выходной сигнал следует ограничить, чтобы предотвратить чрезмерное нарастание интегральной составляющей его выходного напряжения в режиме токоограничения. Величину сигнала хо, необходимо выбирать из условия чадежного изменения состояния компаратора 21 в этом режимеХои (3) Пропорционально интегральный регулятор 13 тока преобразует разность сигналов задания на ток хи обратной связи по току х, = К 1 вДп сигнал управления х усилителем 14 мощности вырабатывающим сигнал управления х, двигателем 15. Под действием этого сигнала в якорной цепи двигателя 15 протекает ток 1,15 6создающий в возбужденном двигателе 15 электромагнитный момент М = С 1, в результате чего двигатель 15 вращается со скоростьюсС 1(Е) -Ми(с) =---- ас1Фогде 1 - момент инерции двигателя 15;М - момент статического сопротивления на валу двигателя15;С - коэффициент пропорциональности между током 1 и моментом М.Пока выполняется условие М(С 1,акс - 1 Е)к), ( )где Я- желаемое ускорение двигателя 15, определяемоенастройкой блоков задающего устройства 1,усилитель-ограничитель 12 работаетв линейной зоне, т.е, 1513415что приводит к размыканию управляемых ключей 5 и 7 и прекращению роста,.управляющих сигналов х, и х навыходах интеграторов б и 8 задающегоустройства 1, Благодаря этому послевыхода системы из режима токоограничения отработка заданного перемещения осуществляется без колебанийвокруг установившегося положения,(фиг. 5),Указанные отличительные особенности позволяют повысить быстродействие и уменьшить колебательность предлагаемой системы, т,е. позволяютотрабатывать любые входные сигналыбез перерегулирования и дотягивания.Повышается надежность установок, вкоторых применяется система так какколебания системы вокруг установившегося положения могут Привести каварии. Например, при управлении. приводом нажимных винтов обжимныхпрокатных станов задание на перемещение верхнего валка вниз подаютв то время, когда прокатываемый металл еще находится в клети, что приводит к возникновению режима упора,Это делают для улучшения структурыметалла. хвостовой части слитка Если в системе управления не преду,смотреть меры по устранению колебаний привода вокруг установившегосязначения при выходе из.режима упора.то после выброса слитка из клетиможет произойти тяжелая авария: посадка валка на валок,Формула из обр ет енияСистема управления положением,содержащая последовательно соединен510 ные источник входного сигнала, нелинейный блок и компаратор, подключенный выходом к первым входам регулятора скорости и регулятора положения соединенного вторым входом с выходом первого интегратора и с вторым входом компаратора, третьим входомс выходом второго интегратора и с вторым входом нелинейного блока, четвертым входом - с выходом датчика положений, а выходом - с вторым входом регулятора скорости, подключенного третьим входом к выходу датчика скорости, и последовательно соединенные регулятор тока, усилитель мощности и исполнительный двигательвал которого кинематически связан с валами датчиков положения и скорости, а электрический выход которого соединен с входом датчика тока, подключенного выходом к первому входу регулятора тока, о т л и ч а ю - щ а я с я тем, что, с целью повы 5 шения быстродействия и уменьшенияколебательности системы, в нее дополнительно введены блок сравнения, пороговое устройство, два ключа и усилитель-ограничитель, соединенныи входом с выходом регулятора скорости и первым входом блока сравнения, а выходом - с вторыми входами регулятора тока и блока сравнения, подключенного выходом через пороговое устройство к управляющим входам обоих З 5- ключей, информационный вход первогоключа соединен с выходом компаратора, а выход - с входом первого интегратора, подключенного выходом к информационному входу второго ключа соедипенного выходом с входом второго интегратора.1513415 орректор С. Че ла акт Тираж 78 Подписи 6076 4 ГКНТ СССР зводственно-издательский комбинат "Патент", г. Ужгород арина, 101 фри Составитель Г, НефедоваТехред Л.Олийнык НИИПИ Государственного комитета по изобретениям 113035, Москва, Ж, Раушская на открытиям д, 4/5
СмотретьЗаявка
4327001, 27.07.1987
ДОНЕЦКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ТОЛОЧКО ОЛЬГА ИВАНОВНА, КОЦЕГУБ ПАВЕЛ ХАРИТОНОВИЧ, ГУБАРЬ ЮРИЙ ВЛАДИМИРОВИЧ, СТОЛБА ВЛАДИМИР АНАТОЛЬЕВИЧ
МПК / Метки
МПК: G05B 11/01, G05D 3/12
Метки: положением
Опубликовано: 07.10.1989
Код ссылки
<a href="https://patents.su/6-1513415-sistema-upravleniya-polozheniem.html" target="_blank" rel="follow" title="База патентов СССР">Система управления положением</a>
Система управления двигателем с блоком защиты от перегрузок

Номер патента: 1749976
Опубликовано: 23.07.1992
Авторы: Громыкин, Губин, Карайченцев, Петровский
МПК: H02H 7/08, H02M 7/538
Метки: блоком, двигателем, защиты, перегрузок
...системы,Система содержит инвертор 1 с резистором 2 на входе, инвертор 3, резисторы4 - 6, первый транзистор 7, диоды 8 - 13, второй транзистор 14, диоды 15 и 16 в цепи30 коллектора первого транзистора, резисторы 17 - 20, третий транзистор 21, резистор 22в цепи базы первого транзистора, четвертый транзистор 23, стабилизатор напряжения, выполненный на резисторе 24,35 конденсаторе 25 и стабилитроне 26, пятыйтранзистор 27, к базе которого подключенрезистор 28, шестой транзистор 29, базакоторого подключена к коллектору фототранзистора оптрона 30, подстроечный рези 40 стор 31 и резистор 32.Система работает следующим образом,На вход инвертора 1 поступает. сигналширотно-импульсной модуляции (ШИМ)фиг.2),145 Пройдя через инвертор 1, сигнал...
Привод вентилятора системы охлаждения двигателя внутреннего сгорания

Номер патента: 989113
Опубликовано: 15.01.1983
Автор: Коновалов
МПК: F01P 7/08
Метки: вентилятора, внутреннего, двигателя, охлаждения, привод, сгорания, системы
...18, раэъединяющую его с ве"домым фрикционным диском 19, установленным на вентиляторе 1; вращающемся с помощью подшипника 20, рас- ЗО положенного иа валу 4.При запуске или работе холодногодвигателя 2, когда температураводы в рубашке охлаждения двигателяниже заданного предела, диафрагма.10 под воздействием возвратной пружины 18 через нажимной диск 17, упор Ъ15, толкатель 14, пружину 13 и шток12 сжимает жидкость 9 в термостате8. Ведущий 17 и ведомый.19 дискимуфты в это время разъединены и вентилятор 1 не вращается. Вода, нагнетаемая крыльчаткой 7, циркулируетпо большому кругу обращения черезрадиатор.При повышении температуры водыв системе охлаждения до заданногопредела Жидкость 9, нагреваясь втермостате 8, увеличивает давлениена диафрагму...
Исполнительное устройство реверса и переключения скоростей для системы дистанционного управления главным судовым двигателем

Номер патента: 1065298
Опубликовано: 07.01.1984
Авторы: Гуревич, Иофа, Куликов-Ефимов, Сиротин
МПК: B63H 21/22
Метки: главным, двигателем, дистанционного, исполнительное, переключения, реверса, системы, скоростей, судовым
...устройство микропереключателей 19 - 22. Крышка 23 закрывает микропереключатели, питание к которым подается через штепсельный разъем 24. Для подачи в устройство рабочей жидкости и слива ее установлены штуцера 25 и 26. К основанию 27 устройства прикреплены корпус28 сдвоенного гидроцилиндра, в котором расположены поршни 29 и 30 с пружинами 31и 32. Штоки 33 и 34 поршней 29 и 30 соединены с упорами 35 и 36, расположеннымив гнездах корпуса 37, причем упоры прижимаются к торцам кулачковых устройств 7и 8 пружинами 38 и 39. Кулачковые устройства совместно с рычагами 6 и 40 свободновращаются на оси 41.Для подачи рабочей жидкости в корпус28 сдвоенного гидроцилиндра установленыштуцера 42 и 43. Гидроцилиндр 1 шарнирносоединен с рукояткой...
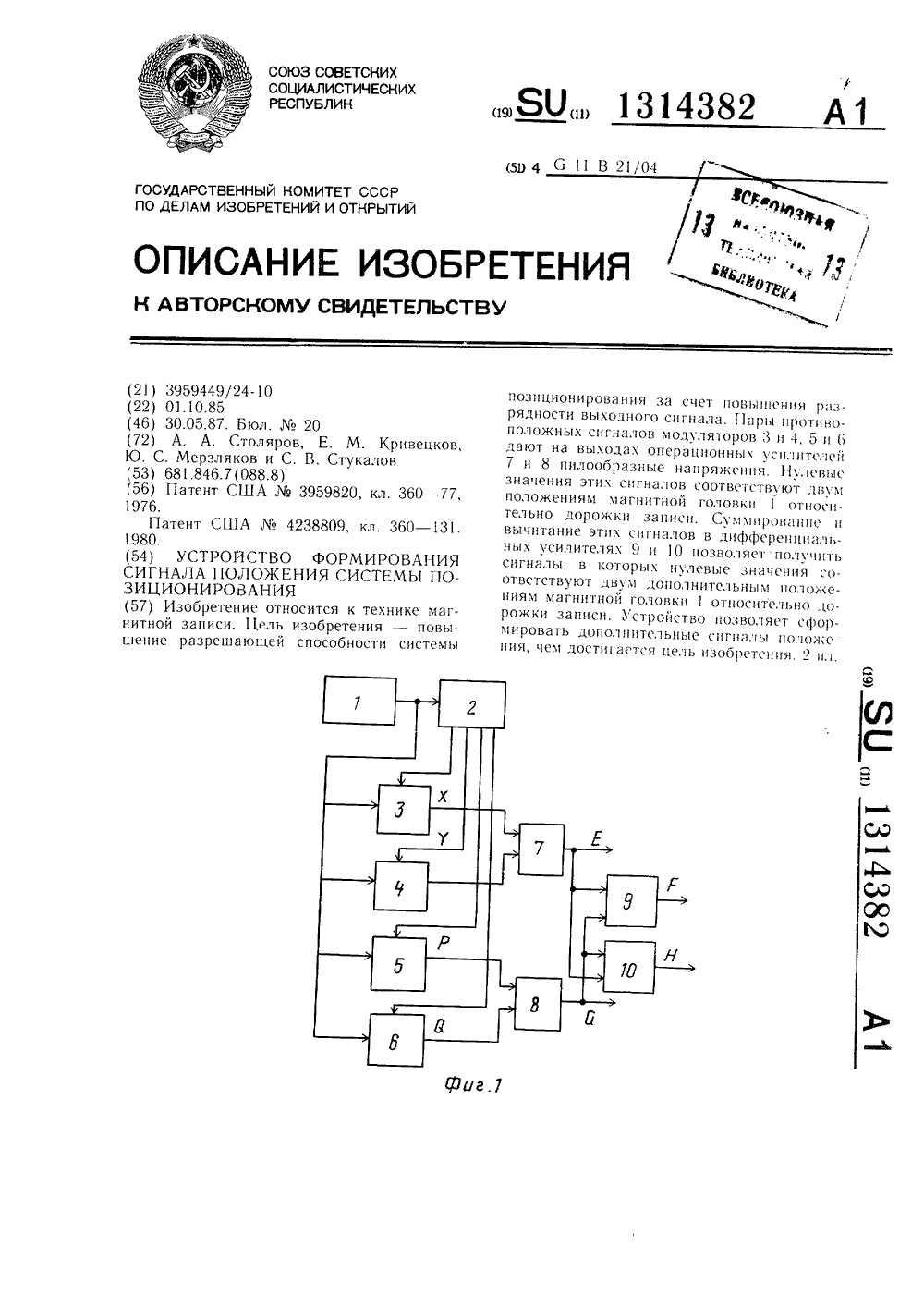
Устройство формирования сигнала положения системы позиционирования
Номер патента: 1314382
Опубликовано: 30.05.1987
Авторы: Кривецков, Мерзляков, Столяров, Стукалов
МПК: G11B 21/04
Метки: позиционирования, положения, сигнала, системы, формирования
...разредающей способности системы позициониро 5 вания за счет повышения разрядности сформированного сигнала.На фиг. 1 показана функциональная схема устройства; на фиг. 2 -- временная диаграмма выходных сигналов при переме шенин магнитной головки вдоль радиуса дискового магнитного носителя.Устройство содержит магнитную головку 1, генератор 2 стробирующих импульсов, демодуляторы 3 - 6, операционные усинлители 7 и 8, суммирующии и вычитаю 15 гций дифференциальные усилители 9 и 10 соответственно.Устройство работает следующим образом.Магнитная головка 1 имеет длину рабочего зазора, равную ширине двух дорожек на которых записаны четыре типа фазомодулироваццых сигналов. Поэтому сигнал, воспроизведенный магнитной головкой 1, демоду...
Система управления скоростью полета изменением тяги двигателей

Номер патента: 818114
Опубликовано: 10.10.2005
Авторы: Гласко, Дорошева, Митриченко, Розин
МПК: B64C 13/18
Метки: двигателей, изменением, полета, скоростью, тяги
Система управления скоростью полета изменением тяги двигателей, содержащая блок датчиков, выход которого по сигналу отклонения воздушной скорости от заданной скорости подключен к блоку выделения ускорения ветра, блок амплитудно-фазовой коррекции, подключенный к исполнительному блоку, второй вход которого соединен с выходом блока датчиков по логическому сигналу включения, отличающаяся тем, что, с целью повышения помехозащищенности и точности управления при полете в турбулентной атмосфере, в нее введены нелинейный преобразователь ускорений ветра, блок интегрирования ускорений, блок подавления помех сигнала ускорения, блок подавления порывов ветра, блок разделения больших и малых порывов...
Предыдущий патент: Способ измерения временных интервалов между импульсами
Следующий патент: Адаптивная система управления потенциально опасным объектом
Случайный патент: Способ нанесения покрытия на подложку с отверстием перед испытанием на адгезию