Система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
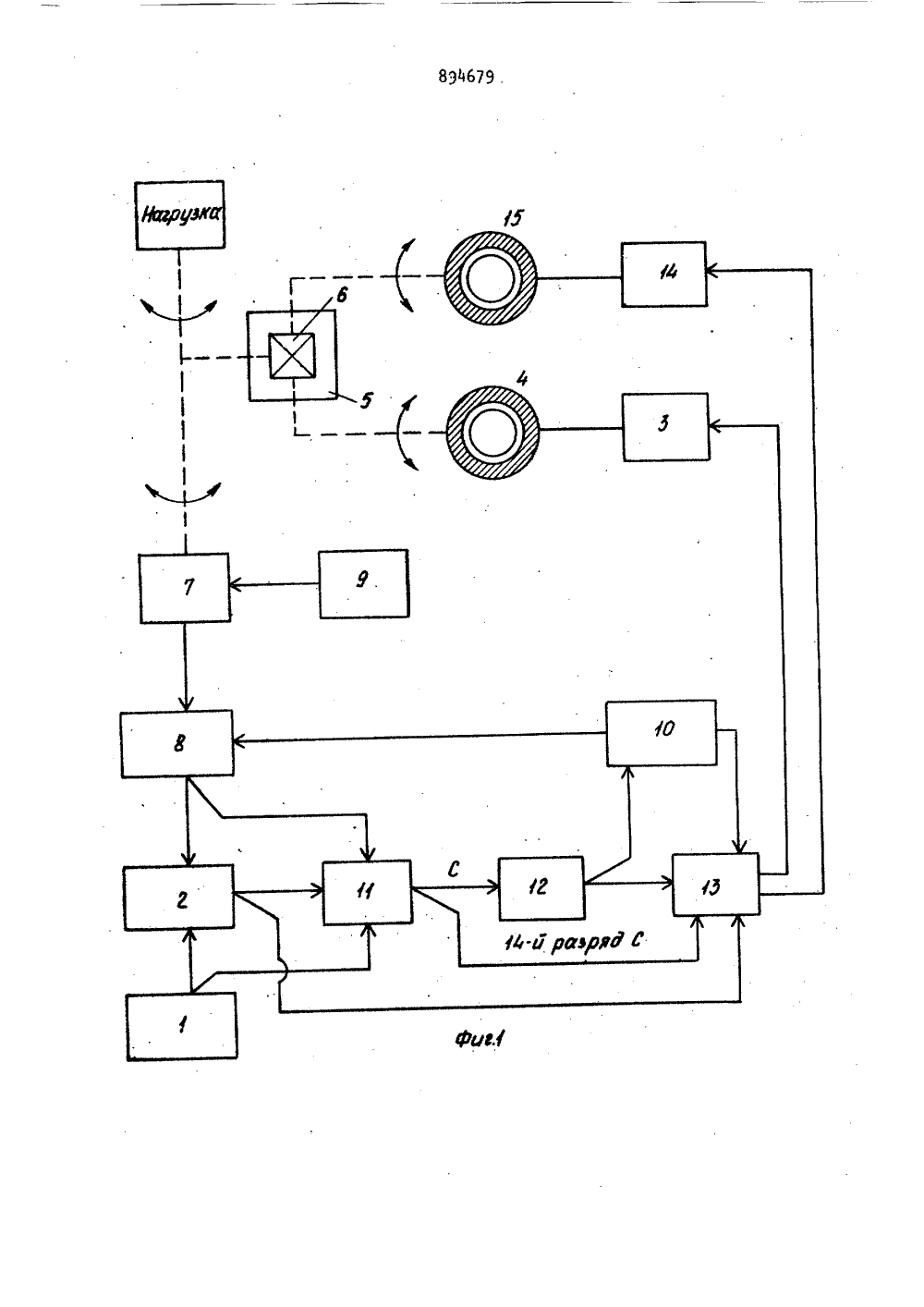
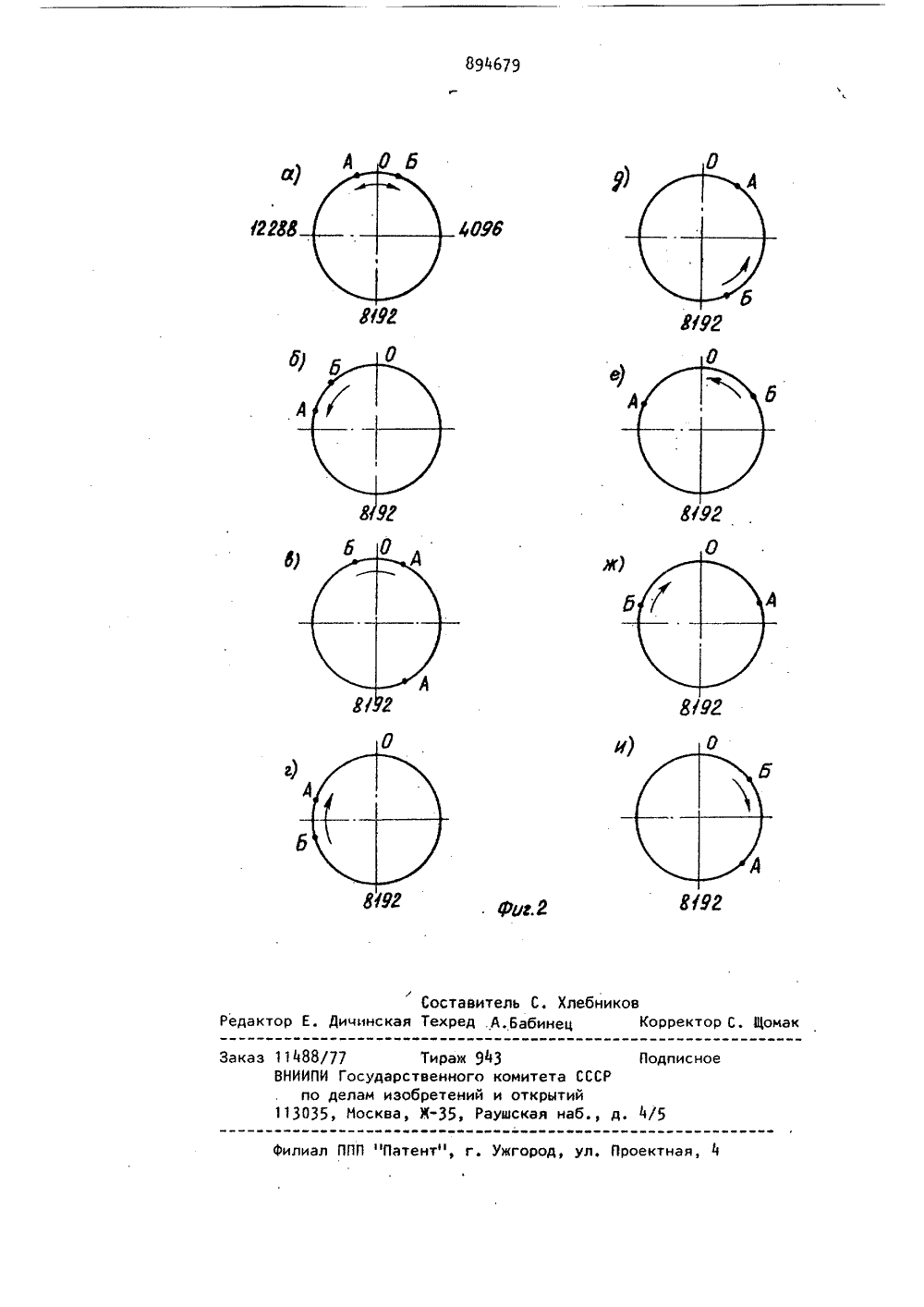
Союз СоветскихСоциалистическихРеспублик АВ ОМУ СВИДЕТЕЛЬСТВУ(51) М ки РЙВ 19/19 В 19/40 присоединением за23) П рнорнтетГаеударетавииый комитв СССР ае делам изобретеиий и открытий(53) УДК 621791 .763,(088,8) ковано Дата опубликования описания) Авторы изобретенн В, И. Свердлов. и А, Д. Данилов 71) Заявите 54 СИСТЕМА ПРОГРАММНОГО УПРАВЛЕ просхо ом ни хо ыИзобретение относится к автоматике и вычислительной технике и предназначено для использования, например, в системах контроля радиолокационных устройств.Известна система программного управления, содержащая блок ввода программы, коммутатор фаэ, блок формирования ошибок, блок задержки, датчик перемещений и шаговый привод 11,Недостатки этой системы - невысокие точность и быстродеиствие, при чем последнее обусловлено, в частности, малой скоростью вращения вала шагового привода.Наиболее близкой к предлагаемой является система, программного управления, содержащая включенные последовательно блок ввода программы и анализатор кодов, привод, кинема" тически связанный через редуктор с выходом системы и датчиком угловых перемещений, соединенный через преобразователь кода с другим входом анализатора кодов, генератор о ного сигнала, подключенный вы д к датчику угловых перемещений, и синхронизатор, один выход которого соединен с другим входом преобразователя кода 12 1.Известная система обеспечивает высокую точность отработки входного сигнала, однако быстродействие ее мало вследствие малой скорости вращения выходного вала шагового при" вода.Цель изобретения - повышение быстродействия системы при сохранеи высокой точности отработки выдного сигнала,Указанная цель достигается тем, что в систему программного управ- пения, содержащую включенные последовательно блок ввода программы и анализатор кодов, привод, кинематически связанный через редуктор с в ходом системы и датчиком угловых перемещений, соединенный через пре 894679образователь кода с рругим входоманализатора кодов, генератор опросного сигнала, подключенный выходонк датчику угловых перемещений, и синхронизатор, орин выход которого соединен с другим входом преобразователя кора, введены включенные последовательно сумматор, дополнительный преобразователь кода, коммутат р и дополнительный привод, выход которого 19кинематицески связан с редуктором,причем входы сумматора соединены совходами и выходом анализатора кодов,а другие входы конмутатора, другойвыход которого подключен ко входу ЗЭосновного привода, соединены с выходами анализатора кодов и сумматора и другим выходом синхронизаторавход которого соединен с выходом дополнительного преобразователя кода. 26На Фиг. 1 показана система, функ,циональная схема 1 на Фиг. 2 - различные случаи соотношения кодов програмны и положения вала,Система содержит блок 1 ввода 25программы, анализатор 2 кодов, блок3 управления шаговым двигателем(основной), генератор 9 опросногосигнала (ГОС), синхронизатор 1 О, сумматор 11 - блок вычитания кодов(БВК)дополнительный преобразователь 12 кода - блок определения эоны управления(БОЗУ), коммутатор 13 - блок формирования сигналов управления,(БФСУ) идополнительный привод, образованныйблоком 14 управления аналоговым двигателем (БУАД) и названным двигате лем (АД) 15Устройство работает следующим образом, 43По кодовой команде от блока 1 ввода программы БУРД 14 и БУНД 3 управляют соответственно вращением аналогового двигателя 15 и шагового двигателя 4 по зонам, устанавливая черезредуктор 5 (по наикратчайшему пути)нагрузку и угловое положение, соответствующее кодовой команде, с последующей автоматической Фиксацией положения этой нагрузки.%3Текущая информациА об угловом положении нагрузки снимается в видецифрового кода с ДУП 7, Эта информация поступает на вторые входы анализатора 2 кодов и блок 11 вычитания кодов (БВК) через преобразователь 8 кодов, Работа последнего синхронизируется первым импульсным сигналом синхронизатора 10.Бсли обозначить, например, 14-ти разрядный двоичный код блока 1, поступающий на первые входы анализатора 2 и БВК 11 через А, а 14-ти разрядный код текущего положения нагрузки через Б, то сигналы, формируемые анализатором 2, поступающие на третий вход БВК 11 и на второй вход БФСУ 13, можно записать о следующей Форме; "Больше" при А 1 Б; нМеньшен при А :Б.В БВК 11 определяется абсолютная величина разностиС= Р-Б,Абсолютная величина С лежит в пределахОС 16383.14-ти разрядный код С с выхода БВК 11 поступает на вход БОЗУ 12,14-тый старший разряд кода С поступает на соответствующий вход БФСУ 13. Диапазон изменение кода С разбит на две зоны управления.Зона 1 256С с 16128Зона 6 16128С " 256В зонеотработка заданного воздействия производится АД 15. В зоне- ШД 4, Соотношение зон управленияиявляется Функцией параметров нагрузки, АД 15 и ШД 4. Выделение зон управления в диапазоне изменения С производится в БОЗУ 12, Наего выходе Формируется логическая "1"в случае, если С 7/161 ц, и логическая"1" в случае, если С 256, т.е, Формируются сигналы, соответствующиенахождению кода С в зоне 11В ином случае на выходе блока 12Формируется логическая н 1" информи"рующая о нахождении кода С в зоне 1.При ненахождении кода в зоне 1 всинхрониэаторе 10 устанавливается частота следования "пачек" импульсов=330 Гц, обусловленная частотой работы ШД 4, Впротивном случае час"тота следования "пачек" импульсовравна Г 5 кГц, обусловленная скоростью вращения АД 15,Выбор управления двигателями 4или 15 и направление вращения производится в БфСУ 13,Работа последнего поясняетсяфиг,2, где представлены возможныевзаимные положения кода программы Аи текущего положения Б,Случае 1, С16128 5А БНа выходе блока 13 формируетсяимпульсный сигнал, который, воздействуя на БУНД 3, заставит повернутьсяШД 4 против часовой стрелки (Фиг,2 а), вСлучай 2. С256А БВ этом случае сигнал логической"1" также Формируется на выходе блока 13 аналогично случаю 1(фиг.2 б),Слуцай 3. С16128А БНа выходе блока 13 формируетсяимпульсный сигнал, который вызоветповорот ШД 4 по часовой стрелке (фиг. 24. 26Случай 4, С с 256А 7 БСигнал логической "1" также формируется на выходе блока 13. Работааналогична случаю 3 (фиг.2 г),25Случай 5. 256 Г 8192АБВыходной сигнал воздействует наАД 15 церез БУАД 14 и заставляетповорачиваться против часовой стрел- ЗОки ( фиг.2 д),Случай 6, 8192С 16128А с БСигнал логической "1" формируетсяна том же выходе блока 13 и работа з 5аналогична случаю 5 (Фиг.2 е),Случай 7. 892С16128АБ Сигнал логической "1" заставляет АД 15 поворачиваться по часовой стрелке (фиг. 2 ж),Случай 8, 256С8192Л 7 БСигнал логической "1" формируется на том же выходе блока 13 и заставляет АД 15 поворачиваться по часовой стрелке (Фиг. 2 и).Управление АД 15 производится БУАД 14, а ШД 4 - БУШД 3. Движения выход" ных валов ШД 4 и АД 15 складываются в редукторе 5 дифференциалом ;6. По- очередная работа ШД 4 и АД 15 позволяет полностью использовать высокие .скоростные качества АД 15 и пошаговую работу ШД 4 для получения устойчивости системы. В качестве аналогового двигателя может применяться, напри" мер двигатель постоянного тока. Таким образом, использование в сис"теме аналогового двигателя, работающего в релейном режиме, наряду с шаговым двигателем позволяет существенно повысить быстродействие системы, сохранив высокую точность отработки. Это достигается тем, цто большие рассогласования обрабатываютсяв системе АД 15 по наикратчайшемупути. Как только рассогласование станет малой величиной, произойдет переключение управления с АД 15 на НД 4,Известная система с одним исполнительным двигателем (шаговымимеетвремя отработки максимального входного воздействия 80 с (при точности1,34), в то время, как система сдвумя двигателями, один иэ которыхшаговый, а другойаналоговый например двигатель постоянного тока,отрабатывает максимальное входноевоздействие за время 7 с при той жеточности обработки.Формула изобретенияСистема программного управления,содержащая включенные последовательно блок ввода программы и анализаторкодов, привод, кинематически связанный через редуктор с выходом системыи датчиком угловых перемещений, соединенный через преобразователь кодас другим входом анализатора кодов,генератор опросного сигнала, подключенный выходом к датчику угловыхперемещений, и синхронизатор, одинвыход которого соединен с другимвходом преобразователя кода, о т л ич а ю щ а я с я тем, что, с цельюповышения быстродействия системы,она содержит вклюценные последовательно сумматор, дополнительный преобразователь кода, коммутатор и дополнительный привод, выход которого кинематичесхи связан с редуктором, при"чем входы сумматора соединены со входами и выходом анализатора кодов, адругие входы коммутатора, другой выход которого подключен ко входу основного привода, соединены с выходами анализатора кодов и сумматора идругим выходом синхронизатора, входкоторого соединен с выходом дополнительного преобразователя кодаИсточники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРК 536472, кл, 0 05 В 19/40, 1976.2, Авторское свидетельство СССРУ 306769,кл 0 01 В 9/02,1970 прототип894679 гав УУГ Составитель С. ХлебниРедактор Е. Дицинская Техред .А.бабинец ктор С. Щома каз 11488/77 Тираж 943 ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д, Подписн филиал ППП "Патент", г. Ужгород, ул. Проектная
СмотретьЗаявка
2850613, 14.12.1979
ПРЕДПРИЯТИЕ ПЯ А-7162
СВЕРДЛОВ ВЛАДИМИР ИСААКОВИЧ, ДАНИЛОВ АЛЕКСАНДР ДМИТРИЕВИЧ
МПК / Метки
МПК: G05B 19/19
Метки: программного
Опубликовано: 30.12.1981
Код ссылки
<a href="https://patents.su/5-894679-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления</a>
Преобразователь двоичного кода в код системы остаточных классов

Номер патента: 959062
Опубликовано: 15.09.1982
Автор: Коляда
МПК: G06F 5/02
Метки: двоичного, классов, код, кода, остаточных, системы
...3 Р.- основные модули ранговогоЬрасширения систе)ры остаточных клас- ЗОсов," Ри+- дополнительный модульР ) 2 с 1,. Количество разрядов входного регистра й=0 о Р(пф") . (Через 1 хобозначается наименьшее целое число,не меньшее х); блок 3 преобразователей цифр позиционного кода, состоящий иэ в: )М/В преобразователей, 1-ыйиз которых (1=1,2п преобразует1-ое число (слагаемое) позиционногопредставления исходного двоичного 40кода в системе счисления с основанием Р = 21 в код системы остаточныхклассов с модулями Р, Р 2,,рРп.р 1группа блоков суммированйя вычетов 4,з.-ый из которых (1=1,2п+1) пред-. 45назначен для,суммирования вычетов помодулю Р,; блок 4, выходные шины 5Устройство работает следующим образом,ПУсть требуется перевести в...
Преобразователь позиционного кода в двоичный код

Номер патента: 1064276
Опубликовано: 30.12.1983
Авторы: Кочергин, Кульбицкий
МПК: G06F 5/02
Метки: двоичный, код, кода, позиционного
...соединен с первыми входами вторых. элементов И с первой по четвертую . групп, четвертого и пятого элементов И пятой группы, третьего элемента И шестой группы и с первыми входами с пятого по седьмой элементы И седьмой группы, первый вход четвертого элемента И шестой группы соединен с прямым входом второго разряда второго входа делимого делителя на 2 , вторые входы всех элементовИФпятой, шестой и седьмой групп соединены с соответствующими выходами второго дешифратора пятифазного кода, прямой и инверсный выхода которого являются прямым и инверсным вы" ходами частного делителя на 2 , пряс мой вход второго разряда второго входа делимого делителя на 2 ф соеДинен с первыми входами третьих элементов И первой и третьей групп, вторыми входами...
Преобразователь кода системы остаточных классов в позиционный код

Номер патента: 1228290
Опубликовано: 30.04.1986
МПК: H03M 7/18
Метки: классов, код, кода, остаточных, позиционный, системы
...1 С ка а, а на выходе вычитателя 7 Формируется последовательный двоичный код разности остатков а - а которьй, начиная с младшего разряда, поступаег на информационный вход формирователя 8 дополнительного кода.Формирователь 8 дополнительного кода преобразует дополнительный код разности остатков а " а, в прямой код, если на его управляющий вход поступает сигнал логической единицы с нулевого выхода триггера 14 в случае а с а , или пропускает без изменения прямой код разности остатков да2 1 когда триггер 14 находится в единич ном состоянии в случае 22 а,. Таким образом, на выходе Формирователя Я дополнительного кода Формируется поя 90 бмой код абсолютной величины разности остатков а-а который через элемент 16 И поступает, начиная с...
Преобразователь кода фибоначчи в двоичный код

Номер патента: 1432789
Опубликовано: 23.10.1988
Авторы: Замчевский, Звенигородская, Соляниченко, Стахов, Тарасова
МПК: H03M 13/23
Метки: двоичный, код, кода, фибоначчи
...появляется хотя бы одна иэзапрещенных комбинаций, на выходе дешифратора 5 появляется сигнал, свидетельствующий о нарушении формы представления входной кодовой посылки, иэтот сигнал поступает на контрольныйвыход 12 преобразователя, а также навход элемента ИЛИ 4, по которому происходит обнуление накапливающего сумматора 3, запись числа и/4. в счетчикб и повторная запись и-разрядной посылки 1-кода Фибоначчи в регистр 1.При правильной входной кодовой посылке в зависимости от установившегося кода на выходе блока 2 постояннойпамяти появляется двоичный эквивалент веса четырех разрядов 1-кода Фибоначчи с ИОО, который поступает навход накапливающего сумматора 3,Передним фронтом тактирующего импульса происходит запись...
Преобразователь чисел из кода системы счисления в остаточных классах в двоичный код

Номер патента: 1541783
Опубликовано: 07.02.1990
Авторы: Исмаилов, Хаспулатов
МПК: H03M 7/18
Метки: двоичный, классах, код, кода, остаточных, системы, счисления, чисел
...счетчика 6 увеличивается на "1" причем оно Равно 1.1 р-где 1 номеРциклав Ча а вход ЭА блока 7 подается число с выхода счетчика 6, на вход ЭВ - остаток модуля Рв. После Фронта С 2 через время достаточное55 для последовательной записи в регистр 2, передачи информации через мультиплексоры 3 и 5, выборки из блока 7,. следует Фронт СЗ, по которому вычитатель 4 выполняет действиеНакапливающий сумматор8 прибавляет к числу, которое содержит число с выхода Я блока 7,Через время работы накапливающегосумматора 8 (значительно большее,чем время срабатывания вычитателя 4);цикл заканчивается,Формула. изобретения Преобразователь чисел из кода системы счисления в остаточных классахв двоичный код, содержащий регистр,вычитатель по совокупности...
Предыдущий патент: Устройство для программного управления нарезанием резьбы
Следующий патент: Устройство управления приводом разжима притира
Случайный патент: Устройство для упаковки штучных стержнеобразных предметов