Манипулятор модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1238959
Автор: Мархай
Текст
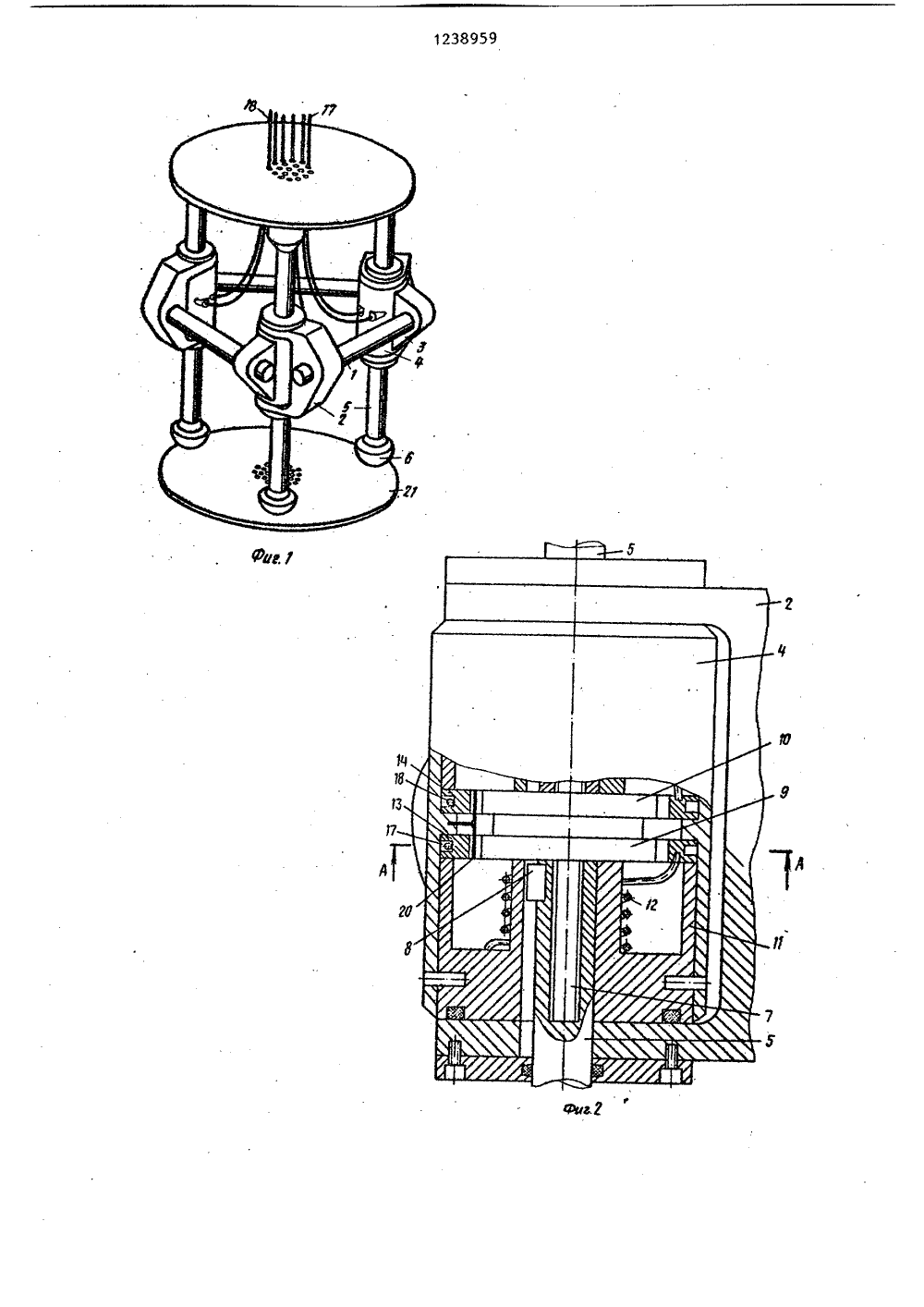
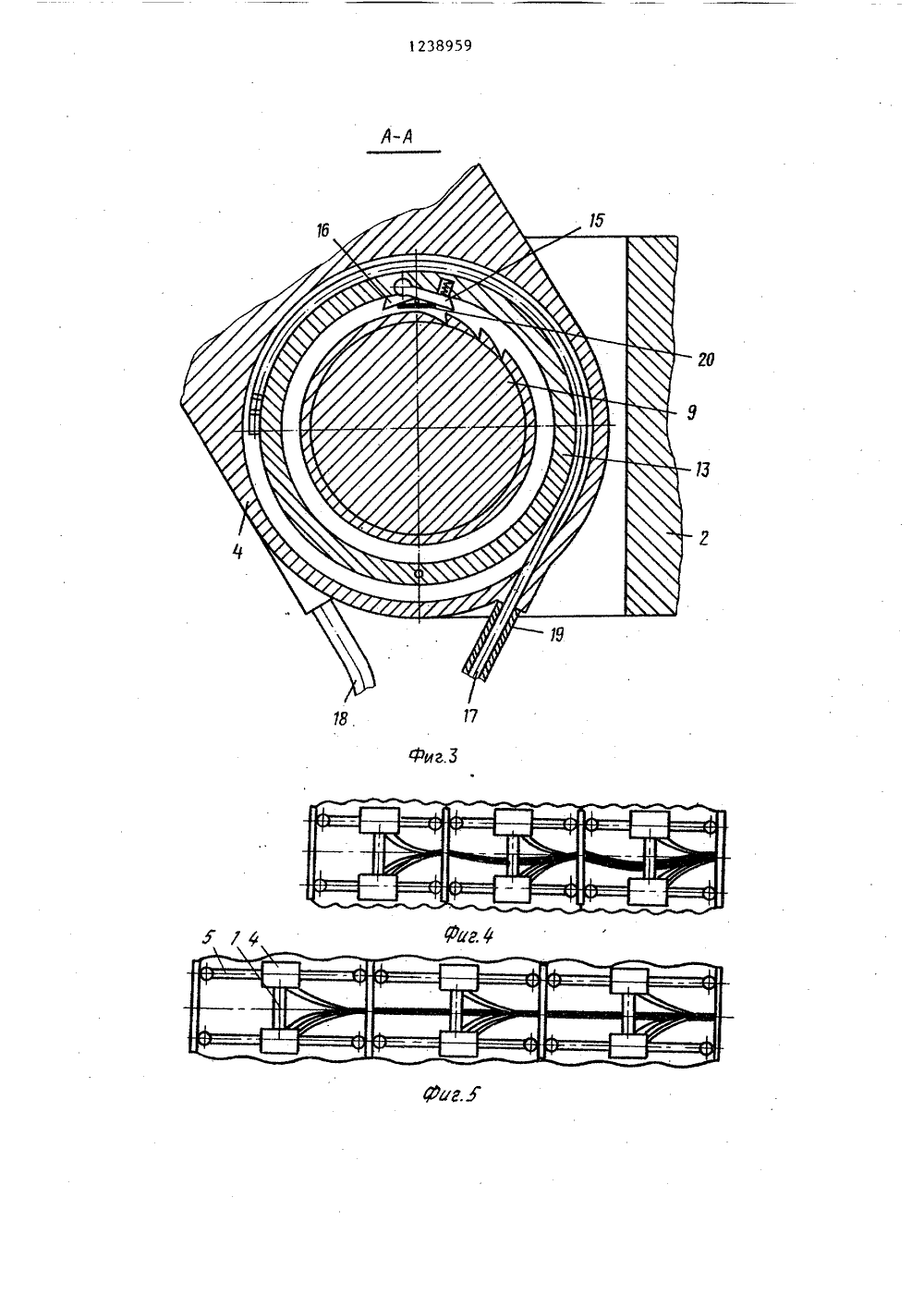
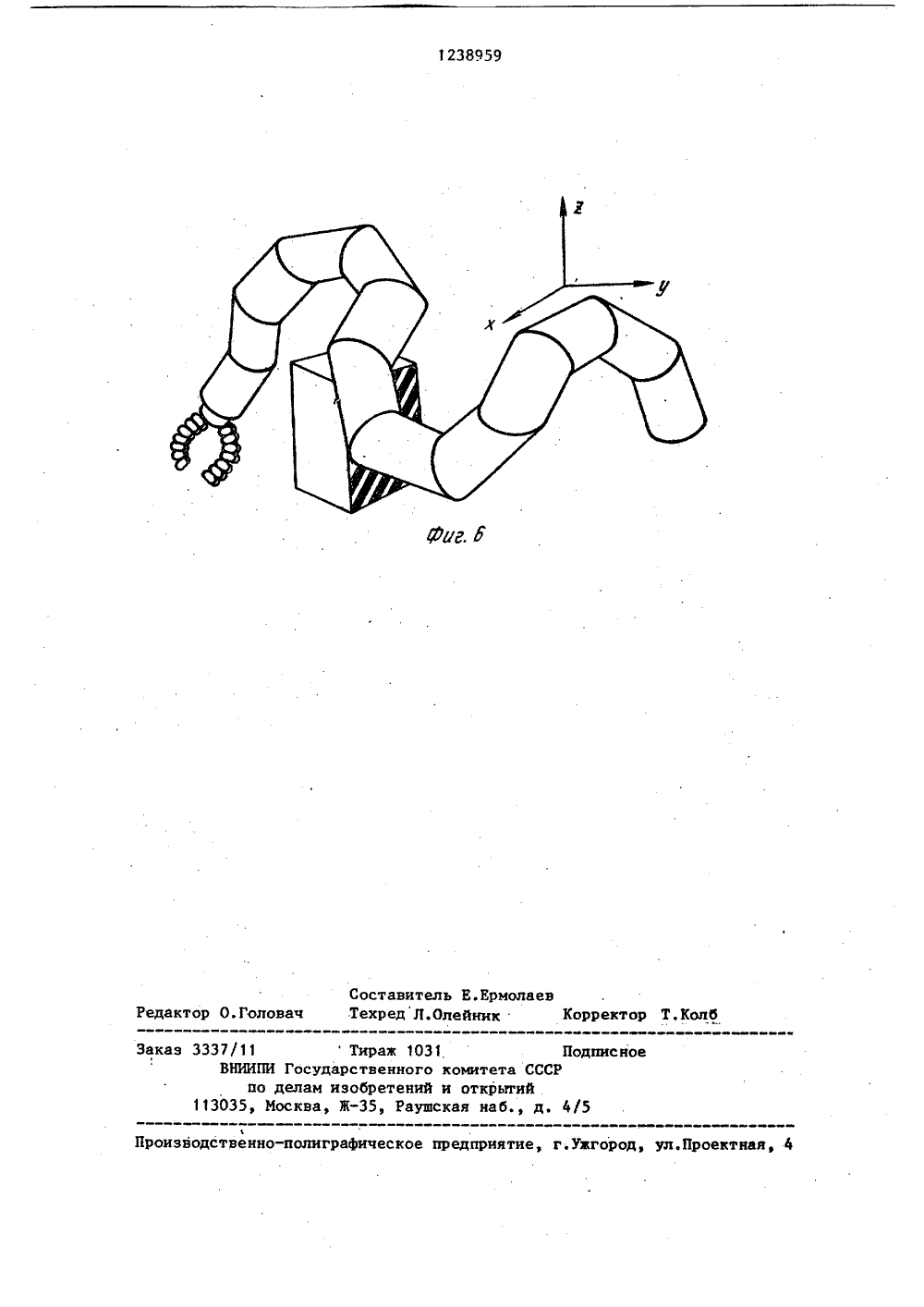
союз советскихСОЦИАЛИСТИЧЕСКИХРЕСГ 1 УБ ЛИК ИУ (11) 159 ГОСУДАРСТВ=КНЬЙ КОМПО ДЕЛАМ ИЗОБРЕТЕНИОПИСАНИЕ ИЗОБРЕТЕН ИТЕТ СССРЙ И ОТКРЫТИЙ 3768268/2 1.07.84 3.06,86,В.В.Марха 2-229 72 Авторское 315, кл.(54)(57) МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА, содержащий последовательно соединенные модули, каждый из которых включает в себя стыковочные фланцы с приводами их относительного перемещения, имеющими двигатели, о т л и ч а ю- щ и й с я тем, что, с целью повышения жесткости и надежности, приводы относительного церемещения фланцев каждого модуля выполнены в виде по меньшей мере трех пар соосно установленных звеньев, одни концы которых в каждой паре шарнирно связаны с со" ответствующими фланцами, а друГие выполнены с резьбовымн отверстиями,разнонаправленной винтовой нарезкии связаны между собой посредствомпередаточных винтовых механизмов,соответствующие винты каждого из которых размещены в резьбовых отверстиях каждой пары звеньев, вилок по чисЛу пар звеньев, обхватывающих корпусавинтовых механизмов и установленныхс возможностью поворота относительнообщей оси пар звеньев, и стержней,причем в вилках и корпусах винтовыхмеханизмов выполнены перпендикулярно оси звеньев отверстия, в которыхразмещены с воэможностью перемещениястержни, каждый из которых установлен Зв отверстии корпуса одной пары звеньев и в отверстии вилки другой пары, ЮФпри этом винты с разнонаправленнойнарезкой каждого передаточного механизма жестко связаны между собой ининематически - с двигателем.12389 30 Выдвижной механизм размещается в корпусе 4 и состоит из двух храпо" вых колес 9 и 10 с различным направлением зубцов и выполненных заодно с винтом 7, имеющим левую и правую резьбу. В торцы колес упирается ста кан 11 с возвратной пружиной 12, он же придерживает от осевых смещений кольца 13 и 14. На внутренних сторо. нах колец 13 и 14 установлены подпружиненные собачки 15 и 16 (фиг.3), а в канавках закреплены тросики 17 и 18 в оболочке 19 типа "гибкий вал". Далее тросики идут к приводам, совершающим возвратно-поступательные дви 35 40Изобретение относится к машиностроению, а именно к манипуляторам,предназначенным для работы в труднодоступных местах.Цель изобретения - повышение 5жесткости и надежности манипулятора,На фиг. 1 изображен модуль манипулятора, общий вид; на фиг, 2 - конструкция выдвижного механизма; нафиг. 3 - разрез А-А на фиг, 2;на фиг. 4 - манипулятор, состоящий изряда модулейв сжатом положении; нафиг. 5 - то же в вытянутом положении;на фиг. 6 - вариант расположения манипулятора в пространстве. 15Модуль манипулятора состоит изтрех стержней 1, каждый из которыхустановлен в отверстии вилки 2 ив отверстии втулки 3 корпуса 4(фиг.1)причем стержни 1 могут размещаться 20в одной или в трех параллельных плоскостях.В каждом корпусе 4 установленопо два звена 5. Каждое звено. 5 однимконцом. связано с помощью шарового,шарнира 6 с звеном последующего модуля, а другим - с винтом 7 (фиг. 2)выдвижного механизма, На звене 5 крепится шпонка 8,59 3жения. В середине корпуса 4 уставовлен упор 20,Модуль манипулятора работает следующим образом,Привод задает, например, тросику 17 возвратно-поступательное движение, которое передается на кольцо 13,периодически проворачивающееся наопределенный угол и возвращающеесяв исходное положение под действиемпружины 12 При провороте собачка 15входит в зацепление с зубцами храпового колеса 9 и проворачивает еговместе с кольцом 13. Поскольку храповое колесо 9 выполнено совместнос винтом.7, проворачивается и винт 7,перемещая оба звена 5 симметрично относительно середины корпуса 4. Возвращаясь в исходное положение, собачка 15 заходит на упор 20. Такимобразом, если нужно провернуть винт 7в обратную сторону с помощью тросика 18, кольца 14, храпового колеса 10 и собачки 16, собачка 15 неможет препятствовать этому провороту,и. наоборот. При этом проворачиваниюи смещению корпусов 4 относительнодруг друга и вокруг своей оси препятствуют три шарнирно взаимосвязанныхстержня 1 (т.е, корпуса 4 могут перемещаться лишь в направлении, перпендикулярном осям звеньев 5). Задаваятаким образом перемещения звеньям 5,можно наклонять фланцы 21 на необходимый угол.В зависимости от условий эксплуатации и сложности решаемых задач намодулях могут быть установлены пневматические, гидравлические, электрические (например, шаговые) и другиедвигатели.Манипулятор отличается повышенной жесткостью и надежностью,что позволяет значительно расширитьего технологические возможности.актор О.Голов рректо 11Тираж 1031 ВНИИПИ Государственного комитета ССС по делам изобретений и открытий 113035, Москва, Ж, Рауаская наб., д.
СмотретьЗаявка
3768268, 11.07.1984
МАРХАЙ ВЛАДИСЛАВ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: манипулятор, модульного, типа
Опубликовано: 23.06.1986
Код ссылки
<a href="https://patents.su/5-1238959-manipulyator-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор модульного типа</a>
Штамп для пробивания отверстий, диаметр которых в несколько раз меньше толщины материала

Номер патента: 102479
Опубликовано: 01.01.1956
Автор: Николаев
МПК: B21D 28/04, B21D 28/14
Метки: диаметр, которых, меньше, отверстий, пробивания, толщины, штамп
...1 в разрезе по Л 1 СД фг. 2; на ф 1 г. 2 - в разрезе по АА фцг. 1; на Фпг. 3 дана отдельно в двух проекциях нижняя колона.Предлагаемый штамп состоит пз верх- неЙ подвижнОЙ плитъ (1) и нижеии плиты (2). 1, верхней плите (1) на упорной детали (3) закреплен пуансон (4), Последний ца гсей длине охватывается двумя колок (об 1 хап) (5) и (6), прсдохраця 10 щцми пуансое От продольного изгиба.Еолоки (5) иснабн;ецы обжимеыми сстора 1 (7), (7), вьступаюпимп за их обращеццыс друг к другу торцы. Сектора колонок (5) и (6) расположень так, что сектора (7) одной колонки входят между секторами (7) другой голонки.На нижнюю колонку (Е) надето ко.шцо(8), которое центрировано в съеке (9) и прочно в нем закреплено. 1 Ольцо (8) служит для точного...
Центрирующий прибор автосцепки

Номер патента: 1108032
Опубликовано: 15.08.1984
Авторы: Ильин, Крайзгур, Кузнецов, Феоктистов
МПК: B61G 7/10
Метки: автосцепки, прибор, центрирующий
...упругий элемент.На фиг. 1 изображен центрирующий прибор в сборе; на фиг. 2 - разрез А - А на фиг. 1; а фиг. 3 разрез Б - Б на фиг. 1. Теггрирукций прибор состоит из маятниковых подвесок 1, с помощью когорых он гн)двешен к вагону или локомотиву. На маятниковые подвески 1 опирается центрируюцая оалочка, состоящая из двух Г-образных звеньев 2 с отверстием 3, в котором расположен связывающий их и опору 4 валик 5.35 На Г-образных звеньях 2 предусмотрены упоры б, между которыми с эксцентриситетом относительно центра поворота Г-образных звеньев установлен упругий элемент 7. На опоре 4 предусмотрешя также заплечики 8. 40 обеспечивающие установку упругого элемента 7 с предваригельной затяжкой.АДля снижения уровня иуха от мета,;лических деталей...
Модуль резонансного манипулятора

Номер патента: 1662839
Опубликовано: 15.07.1991
Авторы: Белов, Кошель, Юрченков
Метки: манипулятора, модуль, резонансного
...добиваются перемещением конца пружины относительно скобы 9, для чего ослабляют натяжение винтов 11, уменьшая силу прижатия пружины к выступающим концам скобы 9, что позволяет освободить конец пружины б или 7 и переместить его в нужную сторону.Подзавод пружины, также необходимый для настройки привода, осуществляется следующим образом, Ослабляют натяжение двух винтов 10 (возможен вариант крепления и с помощью одного винта), уменьшая силу трений между скобой 9 узла крепления и дном направляющего паза на внутренней поверхности корпуса, перемещают узел крепления вместе с зажатым в нем, концом пружины б или 7 вдоль направляющего паза в нужном направлении с последующей фиксацией с помощью тех же винтов 10. Если длины продольного...
Противоперегрузочный модуль манипулятора

Номер патента: 1650435
Опубликовано: 23.05.1991
Авторы: Асауленко, Котелевский
МПК: B25J 19/00, B25J 19/06
Метки: манипулятора, модуль, противоперегрузочный
...при ГКНТ СССР 113035, Москва, Ж, Раушская наб 4/5 Производственно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 101 Изобретение относится к машиностроению и может быть использовано в робототехнике.Цель изобретения - расширение функциональных возможностей. 5На чертеже показан модуль, общий вид. Модуль содержит корпус 1 со сферической полостью, в которой размещен сферический элемент 2 с выполненными в нем 10 выемками.Напротив каждой выемки в корпусе 1 выполнено отверстие, в котором установлены регулировочный винт 3, пружина 4, шайба 5 и шарик 6, образующие шариковый 15 фиксатор. Сферический элемент 2 жестко связан со стержнем 7. Поджимная пластина 8 подпружинена пружинами 9 относительно корпуса 1, Сила поджима...
Система компенсации статического момента в звене ротации плеча дистанционного манипулятора

Номер патента: 381501
Опубликовано: 01.01.1973
Авторы: Васильев, Калинин, Кузьмин, Шабаршов, Ядыкин
МПК: B25J 21/02, B25J 5/00
Метки: дистанционного, звене, компенсации, манипулятора, момента, плеча, ротации, статического
...сельсцнов-датчиков плеча и предплечья электрически соединены. При колебаниях основания манипулятора в звене ротации плеча возникает момент от сцл веса конструкции исполнительного цли задающего органа, который, воздействуя на оператора, создает помехи манипулированию. Для компенсации этого момента необходимо подать ца вход усилителя канала отражения усилия сигиил равный по величине сигналу датчика момецта задающего или исполнительного органа от веса конструкции манипулятора и обратный ему по знаку,Для потец циометрических акселерометр перемец 1 ение движка пропорццональцо составля 1 ощей ускорения, направленной по осцгде Предмет изобретения Составит ль В. КазаковТскрсд Л. Богданова Редактор Г. Литроп ва Корректор Е, Талалаева Заказ...
Предыдущий патент: Привод рабочего органа манипулятора
Следующий патент: Исполнительный орган манипулятора
Случайный патент: Силовой электрический выключатель