Устройство для регулирования и согласования нагрузки параллельно работающих двигателей
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
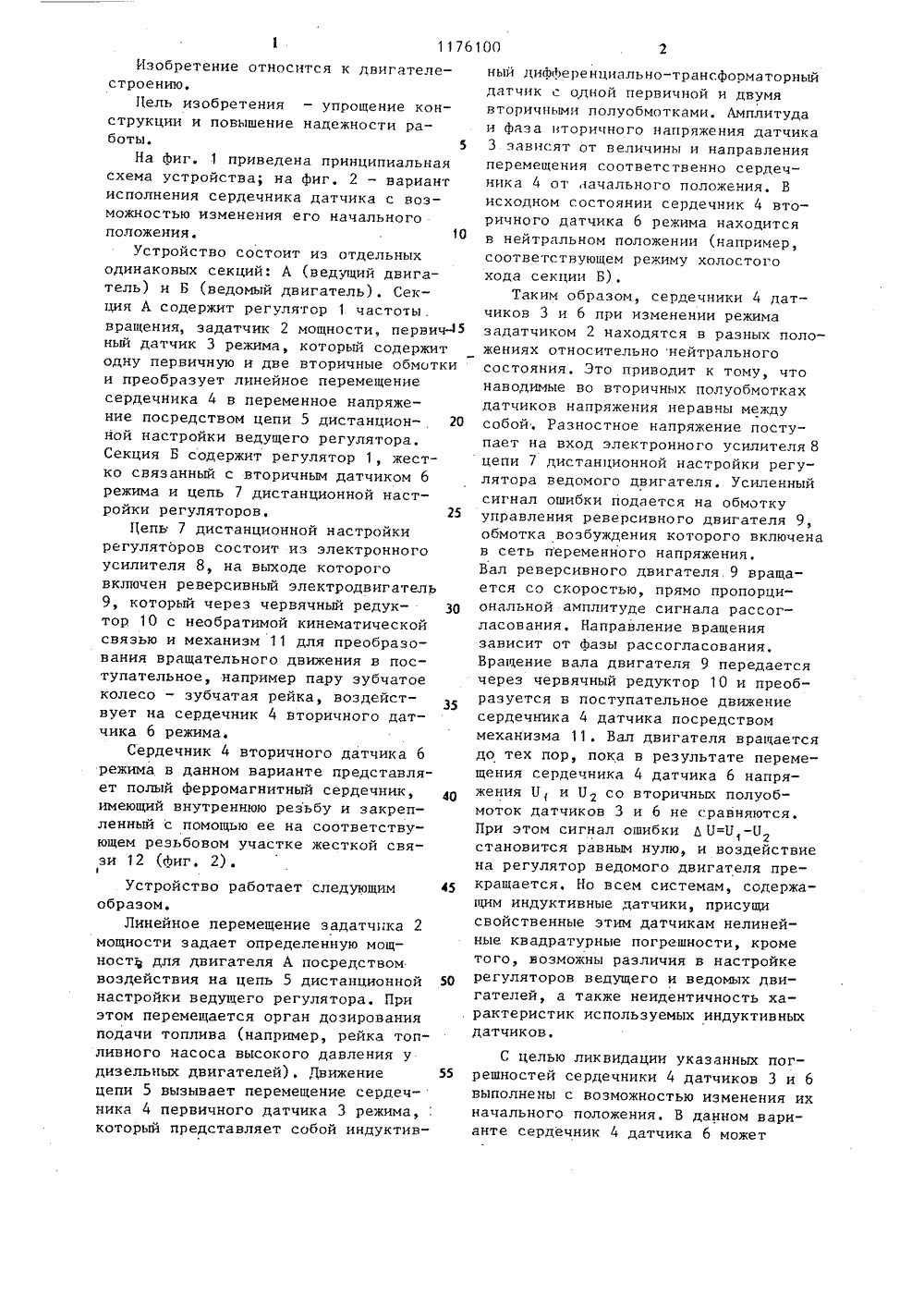
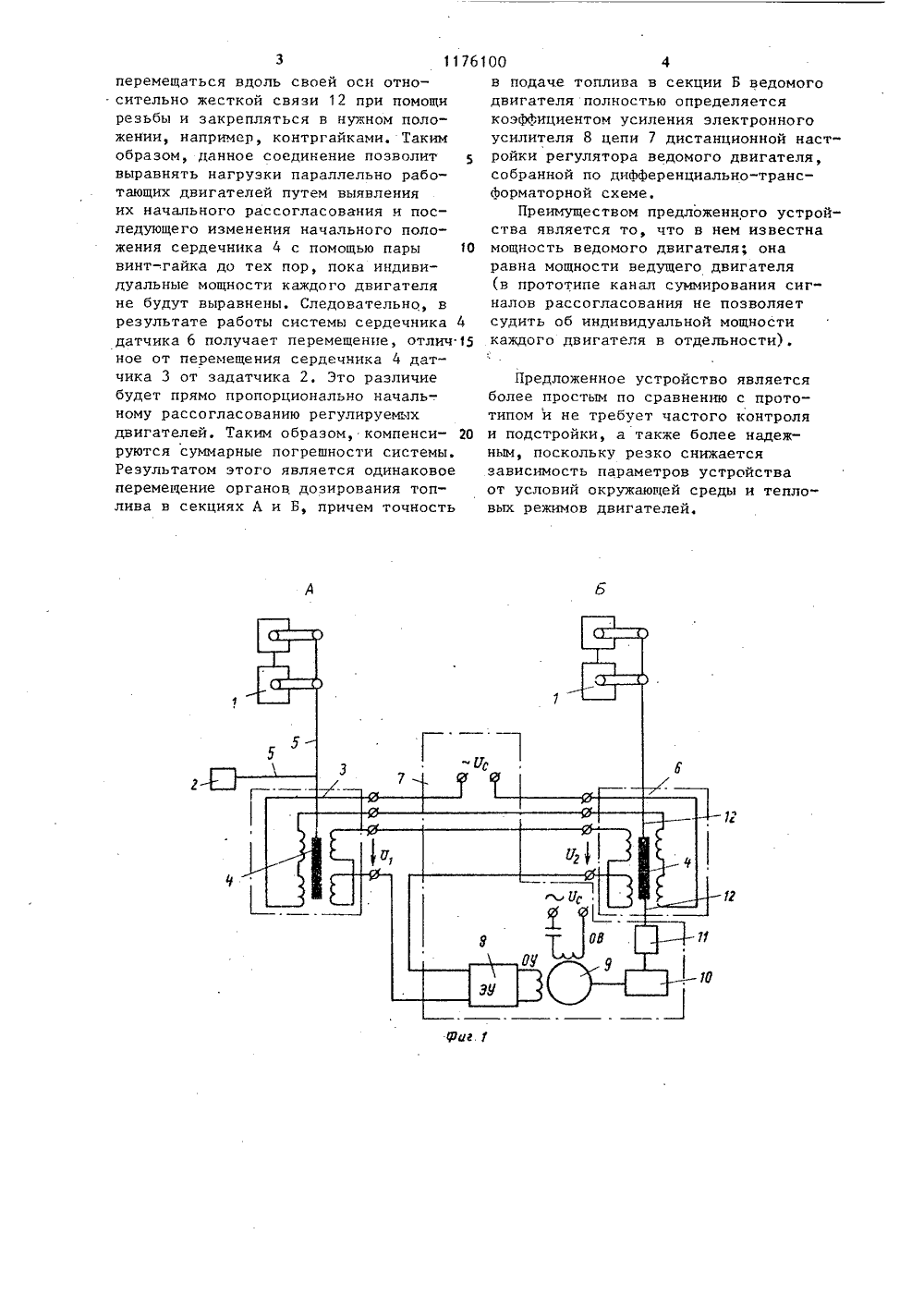
)4 ОПИС ИЗОБРЕТ АВТОРСКОМ ения жности, пер вичныи и вторичполнены в виде ные да электр чики режимо магнитов с сер ой и двумя вто цепь дистанци оров выполнена ьно-трансформа ющей обмотки элечниками одно ичными обмотнной настройк перви камн,регуля ренциа связыв иде д рной схемы,ктромагнитов,ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТ(71) Балаковский филиал Саратовскогоордена Трудового Красного Знамениполитехнического института(56) Авторское свидетельство СССРР 542839, кл. Р 02 Р 25/00, 1977.(54)(57) 1. УСТРОЙСТВО ЛЛЯ РЕГУЛИ-РОВАНИЯ И СОГЛАСОВАНИЯ НАГРУЗКИ ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ДВИГАТЕЛЕЙ, содержащее задатчик мощности ведущего двигателя, регуляторы частоты вращенияведущего и ведомых двигателей, связанные соответственно с первичным ивторичными датчиками режимов, и цепьдистанционной настройки регуляторов,о т л и ч а ю щ е е с я тем, что,с целью упрощения конструкции и повыусилителя, реверсивного электродвигателя и червячного редуктора, причем выход дифференциально-трансформаторной схемы через усилитель соединен с электродвигателем, который через червячный редуктор кинематически связан с сердечниками электромагнитов ведомых двигателей.2. Устройство по и. 1, о т л ич а ю щ е е с я тем, что сердечники электромагнитов установлены с возможностью регулировки их начального положения относительно обмоток электромагнитов.Устройство работает следующимобразом,Линейное перемещение задатчпка 2мощности задает определенную мощность для двигателя А посредствомвоздействия на цепь 5 дистанционнойнастройки ведущего регулятора. Приэтом перемещается орган дозированияподачи топлива (например, рейка топливного насоса высокого давления удизельных двигателей), Движениецепи 5 вызывает перемещение сердечника 4 первичного датчика 3 режима,который представляет собой индуктив 50 55 Изобретение относится к лвигателестроению.Цель изобретения - упрощение конструкции и повышение надежности работы. 5На фиг, 1 приведена принципиальная схема устройства; на фиг, 2 - вариант исполнения сердечника датчика с возможностью изменения его начального10положения.Устройство состоит из отдельных одинаковых секций: А (ведущий двигатель) и Б (ведомый двигатель). Секция А содержит регулятор 1 частоты . вращения, задатчик 2 мощности, первичный датчик 3 режима, который содержит одну первичную и две вторичные обмотки и преобразует линейное перемещение сердечника 4 в переменное напряжение посредством цепи 5 дистанцион ной настройки ведущего регулятора.Секция Б содержит регулятор 1, жестко связанный с вторичным датчиком 6 режима и цепь 7 дистанционной настройки регуляторов. 25Цепь 7 дистанционной настройки регуляторов состоит из электронного усилителя 8, на выходе которого включен реверсивный электродвигатель 9, который через червячный редук тор 10 с необратимой кинематической связью и механизм 11 для преобразования вращательного движения в поступательное, например пару зубчатое колесо - зубчатая рейка, воздействует на сердечник 4 вторичного датчика 6 режима.Сердечник 4 вторичного датчика 6 режима в данном варианте представляет полый ферромагнитный сердечник, 40 имеющий внутреннюю резьбу и закрепленный с помощью ее на соответствующем резьбовом участке жесткой связи 12 (Фиг. 2) .1 ный дифференциально-трансформаторныйдатчик с одной первичной и двумявторичными полуобмотками. Амплитудаи фаза вторичного напряжения датчика3 зависят от величины и направленияперемещения соответственно сердечника 4 от начального положения. Висходном состоянии сердечник 4 вторичного датчика 6 режима находитсяв нейтральном положении (например,соответствующем режиму холостогохода секции Б),Таким образом, сердечники 4 датчиков 3 и 6 при изменении режимазадатчиком 2 находятся в разных положениях относительно нейтральногосостояния. Это приводит к тому, чтонаводимые во вторичных полуобмоткахдатчиков напряжения неравны междусобой. Разностное напряжение поступает на вход электронного усилителя 8цепи 7 дистанционной настройки регулятора ведомого двигателя. Усиленныйсигнал ошибки подается на обмоткууправления реверсивного двигателя 9,обмотка возбуждения которого включенав сеть переменного напряжения.Вал реверсивного двигателя. 9 вращается со скоростью, прямо пропорциональной амплитуде сигнала рассогласования. Направление вращениязависит от фазы рассогласования.Вращение вала двигателя 9 передаетсячерез червячный редуктор 10 и преобразуется в поступательное движениесердечника 4 датчика посредствоммеханизма 11. Вал двигателя вращаетсядо тех пор, пока в результате перемещения сердечника 4 датчика 6 напряжения 0 и П со вторичных полуобмоток датчиков 3 и 6 не сравняются. При этом сигнал ошибки Д 0=0,-0.становится равным нулю, и воздействие на регулятор ведомого двигателя прекращается, Но всем системам, содержащим индуктивные датчики, присущи свойственные этим датчикам нелинейные квадратурные погрешности, кроме того, возможны различия в настройке регуляторов ведущего и ведомых двигателей, а также неидентичность характеристик используемых индуктивных датчиков.С целью ликвидации указанных погрешностей сердечники 4 датчиков 3 и 6 выполнены с возможностью изменения их начального положения. В данном варианте сердечник 4 датчика 6 может1176перемещаться вдоль своей оси относительно жесткой связи 12 при помощи резьбы и закрепляться в нужном положении, например, контргайками. Таким образом, данное соединение позволит выравнять нагрузки параллельно работающих двигателей путем выявления их начального рассогласования и последующего изменения начального положения сердечника 4 с помощью пары 1 О винт-гайка до тех пор, пока индивидуальные мощности каждого двигателя не будут выравнены, Следовательно, в результате работы системы сердечника 4 датчика 6 получает перемещение, отлич.15 ное от перемещения сердечника 4 датчика 3 от задатчика 2, Это различие будет прямо пропорционально началь-.ному рассогласованию регулируемых двигателей, Таким образом, компенси руются суммарные погрешности системы, Результатом этого является одинаковое перемещение органов дозирования топлива в секциях А и Б, причем точность 1 ОО 4в подаче топлива в секции Б ведомогодвигателя полностью определяетсякоэффициентом усиления электронногоусилителя 8 цепи 7 дистанционной настройки регулятора ведомого двигателя,собранной по дифференциально-трансформаторной схеме,Преимуществом предложенного устройства является то, что в нем известнамощность ведомого двигателя; онаравна мощности ведущего двигателя(в прототипе канал суммирования сигналов рассогласования не позволяетсудить об индивидуальной мощностикаждого двигателя в отдельности). Предложенное устройство является более простым по сравнению с прототипом и не требует частого контроля и подстройки, а также более надежным, поскольку резко снижается зависимость параметров устройства от условий окружающей среды и тепловых режимов двигателей.1176100 Составитель С, БерезинТехред А.Бабинец Корректор Е. Сирохман Редактор Веселовс Заказ 5327/37 ж 538 Подписное ВНИП 1 И Государственного комитета СССР по делам изобретений и открытий113035, Москва, Ж, Раушская наб д, 4/5 Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
3624218, 15.07.1983
БАЛАКОВСКИЙ ФИЛИАЛ САРАТОВСКОГО ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКОГО ИНСТИТУТА
ГЕРАЩЕНКО АНДРЕЙ БОРИСОВИЧ, РАЗУВАЕВ АЛЕКСЕЙ ВАЛЕНТИНОВИЧ, УСТИНОВ АНДРЕЙ НИКОЛАЕВИЧ, ВЛАСОВ ВЯЧЕСЛАВ ВИКТОРОВИЧ
МПК / Метки
МПК: F02D 25/00
Метки: двигателей, нагрузки, параллельно, работающих, согласования
Опубликовано: 30.08.1985
Код ссылки
<a href="https://patents.su/4-1176100-ustrojjstvo-dlya-regulirovaniya-i-soglasovaniya-nagruzki-parallelno-rabotayushhikh-dvigatelejj.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для регулирования и согласования нагрузки параллельно работающих двигателей</a>
Устройство для настройки режима работы опрыскивателей растений

Номер патента: 328902
Опубликовано: 01.01.1972
Авторы: Дидух, Думский, Молча, Скл, Судит, Чалый, Штеренгаль
МПК: A01M 7/00
Метки: настройки, опрыскивателей, работы, растений, режима
...управления - в удобном для тракториста месте. То, что в зависимости от изменения тех или иных параметров процесса меняются параметры электрического тока, позволяет производить полуавтоматическую настройку опрыскцвателя, когда тракторист на показывающем приборе получает зцачсццс необходимого режима, и автоматическую, когда в зависимости от значения параметров электрического тока, включается тот цлц иной исполнительный механизм известного типа, напрнлер регулятор расхода )кидкости,На фиг. 1 схематично изображен флОер предлагаемого устройства; ца фцг. 2 - пульт управления для настройки Оцрьскцвсеч 5 На заданный режим.Флюгер служит для автоматической подачи сигнала об цзмецеццц параметров ветра прибору для настройки ца заданный режим...
Способ настройки режима плазменнодуговой резки

Номер патента: 716738
Опубликовано: 25.02.1980
Авторы: Баркан, Белкин, Шапиро
МПК: B23K 9/16
Метки: настройки, плазменнодуговой, режима, резки
...1, и предельно допустимого значения тока для каждого цикла определяют с помощью датчика двойной дуги 8, при фиксировании . которым импульса повышения напряжения между электродом и соплом, прекращают повышение тока и поддерживают в течение некотороговремени горение дуги на данном токе.Напряжение межгу электродом и сопломО при этом возрастает до значения О пос 5 ле чего в течение времени 1, отсутствует изменение напряжения Оз, Повышение напряжения между электродом и соплом в течение времени 1, характеризует дроссслирование столбомдуги отверстия сопла плаэмотрона.Возрастание диаметра столба дуги в каналесопла плазмотрона способствует уменьшениюэффективного проходного сечения, определяющего истечение пристеночного потока газа,вследствие...
Устройство настройки режима работы циклотрона

Номер патента: 710115
Опубликовано: 15.01.1980
Авторы: Ваганов, Васильев, Гордин, Литуновский
МПК: H05H 7/00
Метки: настройки, работы, режима, циклотрона
...циклотрона.При непрерывном режиме работы цик лотрона 1 генератор пилообразного напряжения 5 работает в автоколебательном режиме. Напряжение с его выхода поступает также на схему форми - рователя опорного сигнала б. В момент 5 О сравнения пилообразного напряжения с управляющим напряжением, поступающим со входа управления 10, в схеме формирователя опорного сигнала б вырабатывается импульс. Настройка режима работы циклотрона осуществляется следующим образом. На схему сравнения 7 поступает преобразованный сигнал с сигнального электрода 3 и опорный импульс со схемы б С выхода схемы сравнения 7 сигнал, пропорциональный 0 временному рассогласованию входных сигналов, подается на усилитель 8, который питает дополнительную обмотку 2,...
Устройство для автоматического регулирования режимов работы двигателя и скорости движения самоходной машины с бесступенчатой передачей

Номер патента: 207047
Опубликовано: 01.01.1968
Автор: Петров
МПК: B60K 41/12, F16H 61/42
Метки: бесступенчатой, двигателя, движения, передачей, работы, режимов, самоходной, скорости
...сопротивления 5 движению самоходной машины пространственный кулачок 6 так меняет настройку регулятора, что крутящий момент на колесах машины меняется примерно при постоянной угловой скорости колес. В результате этого ско.0 рость движения самоходнОй машины сохраняется примерно постоянной. При изменении мощности на колесах двигатель переходит с одного заданного режима работы на другой.Профиль пространственного кулачка выби рается в зависимости от изменения положения Ь органа настройки регулятора и положе.ния 5 органа управления бесступенчатой передачей.На фиг. 2 в нижнем правом квадранте по строена зависимость между положением 5органа управления бесступенчатой передачейи ее передаточным отношением .В нижнем левом квадранте из...
Силовая установка с двигателем внутреннего сгорания и гидравлической передачей мощности

Номер патента: 86239
Опубликовано: 01.01.1950
Автор: Кузько
МПК: F01B 11/08, F01B 23/08, F04C 15/02
Метки: внутреннего, гидравлической, двигателем, мощности, передачей, сгорания, силовая
...путем превращения гидромоторов в насосы, для чего достаточно переключить направления пигающего и отводимого потоков. При этом жидкость будет перекачиваться из ресивера низкого давления (бак 9) в расходный ресивер 1, повышая давление в последнем и таким образом аккумулируя работу торможения.В каждом нз гидромоторов установки ротор-кожух 11 несет встроенные в него попарно размещенные лопатки 12, причем наклон лопаток в противоположные стороны обеспечивает реверсирование гидромотора простым изменением направления потока жидкости, а подводящие каналы превращаются в отводящие. Раоочая жидкость поступает и отводится через каналы в статоре 13 который выполнен в виде симметричного тела двоякой кривизны. Области, заполненные жидкостью...