Система управления судовым главным двигателем и винтом регулируемого шага
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 787266
Авторы: Защеринский, Михалев, Павлов, Скворцов



Текст
О П И С А НИ Е ИЗОБРЕТЕНИЯ Союз Советских Сфциаяистинескик Ресяубяик(22) Заявлено 190279 (21) 2726412/27-11с присоединением заявки Йф -. Дата опубликования описания 15.1230)(я з В 63 Н 21/22 Государственный комитет СССР по девам изобретений и открытий(54) СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ГЛАВНЫМ ДВИГАТЕЛЕМ И ВИНТОМ РЕГУЛИРУЕМОГО ШАГАИзобретение относится к автоматизации судовых силовых установок.Известна система управления главным двигателем и винтом регулируемого шага, содержащая блок задания режимов работы, связанный через программный блок, регулятор нагрузки, коммутатор, соединенный одним из входов непосредственно с выкодом блока задания режимов, и исполнительный механизм винта регулируемого шага с механизмом изменения шага винта с датчиком шага и через исполнительный механизм двигателя с регулятором оборотов двигателя, снабженного датчиком нагрузки, выход которого соединен с одним из входов регулятора нагрузки 1.Однако эта система не обеспечивает эксплуатацию установки в оптимальных режимах и необходимой экономичности работы силовой установки.Известна также система управления судовым главным двигателем и винтом регулирования шага, содержащая блок задания режимов работы, соединенный с программным устройством, первый выход которого соединен с одним из входов регулятора нагрузки, другой ,вход которого подключен к датчику нагрузки главного двигателя, снабженного всережимным регулятором, авыход - к одному из входов блокасравнения, другой вход которого соединен с датчиком шага винта, и коммутатор, выход которого соединен сисполнительным механизмом измененияшага винта 21.Данная система обеспечивает 1 ф надежное раздельное управление оборотами главного двигателя и винтомрегулируемого шага и эащиту двигателя от перегрузки, но не обеспечивает экономичность работы силовой 15 уставовки на всех режимах переднегохода.Цель изобретения - повыаение экономичности работы силовой установкина всех режимах переднего хода.20 Эта цель достигается тем, что. программное устройство систеьвю сос-тоит из соединенных с его входомблока программ экономичной работы.установки на малых нагрузках, блока 2 с оптимальной "программы управлениячастотой вращения двигателя и подключенных к его выходу блока программ экономичной работы установки,блока программ заградительной характе " 30 ристики двигателя и блока переключе -ния программ, а также блока выборапрограмм, входы которого соединены с выходами блоков программ эконо.- мичной работы и заградительной характеристики двигателя, а выход бло" ка выбора программ соединен с первым выходом программного устройства, при этом выходы блока переключения программ и блока программ экономичной работы установки на малых нагрузках соединены соответственно со вторым и третьим выходами программного устройства и подключены к первому и второму входам коммутатора. третий вход которого соединен с выходом блока сравнения.На чертеже приведена функциональная схема системы управления судовым главным двигателем и винтом регулируемого шага.Система содержит блок 1 задания режимов, соединенный с программным устройством, в состав которого входят блок 2 оптимальной программы управления частотой вращения двигателя 3, блок 4 программ экономичной работы установки на малых нагрузках, подключенные к выходу блока 2 блок 5 программы экономичной работы установки,блок 6 программы заградитель ной характеристики двигателя 3 и блок 7 переключения -программ, а также блок 8 выбора программ, соединенный своими входами с выходами блоков 5 и 6, а выход его является первым выходом программного устройства и подключен к одному иэ входов регулятора 9 нагрузки, второй вход которого соединен с датчиком 10 нагрузки двигателя 3, снабженного всережимным регулятором 11, связанным с исполнительным механизмом 12, вход которого соединен с выходом блока 2.Выход регулятора 9 соединен с одним иэ входов блока 13 сравнения, к другому входу которого подключен датчик 14 шага винта 15 с механизмом 16 изменения шага, связанным с его исполнительным механизмом 17, вход которого соединен с выходом коммутатора 18, входы которого соеди нены соответственно с выходами блоов 4, 7 и 13.Система работает следующим образом.При воздействии на блок 1 задания режимов работы последний вырабатывает командный сигнал на блок 2 оптимальных программ управления частотой вращения двигателя и блокк 4 программ экономичной работы установки на малых нагрузках.При задании оператором режима, соответствующего малой нагрузке силовой установки, блок 2 вырабатывает на своем выходе постоянный по величине сигнал, равный, например, оборотам холостого хода. При этом исполнительный механизм 12 воздействует на всережимный регулятор 11двигателя 3, который поддерживаетпостоянными обороты двигателя 3.Одновременно блок 4 вырабатывает насвоемвыходе сигнал, который черезкоммутатор 18 проходит на исполнительный механизм 17 и устанавливает органы управленйя механизма16 изменения шага в заданное положение.При задании оператором режима,соответствующего нагрузке силовойустановки несколько большей, чем дви"гатель может развивать на оборотаххолостого хода при максимальном рас"творе винта, блок 7 вырабатывает15 дискретный сигнал, по которому коькутатор 18 подключает к исполнительномумеханизму 17 выход блока 13. Одновременно производится перестройкавсережимного регулятора 11, так какЩ исполнительный механизм 12 получаетот блока 2 задание. При этом на регулятор 9 поступает сигнал от датчика10, а через блок 8 выбора программ -сигнал от блока 5 программ экономичной работы установки.25 по этим двум сигнш ре, лятор 9осуществляет управление шагом винта 15 таким образом, чтобы обеспечивалась заданная программа управленияпо нагрузке силовой установки. Приэтом в зоне малых нагрузок происходит изменение нагрузки двигателя 3только за счет изменения частотывращения двигателя при максимальномрастворе шага винта, а на другомЗ 5 участке программы изменение нагрузки двигателя осуществляется как засчет изменения частоты вращениядвигателя 3, так и за счет измененияраствора шага винта 15.40 Управление установкой на большихнагрузках производится аналогичнымобразом на соответствующем участкепрограммы за счет одновременного изменения частоты вращения двигателяи шага. винта,В случае задания оператором режима, превышающего заградительнуюхарактеристику двигателя, блок 8 выбора программ подключает к регулятору 9 нагрузки выход блока 6 программы заградительной характеристики итем самым обеспечивает защиту двига"теля от перегрузки,Для ускорения вывода установкина заданный режим предусмотрено воздействие на блок 13 датчика 14 шагавигта 15. При этом, поскольку регу"ляторы нагрузки используются, какправило, типа интегральных, введениедатчика 14 обеспечивает при неэначи 60 тельном изменении выхода регулятора9 нагрузки перемещение лопастей винта 15 со скоростью, обеспечиваемоймеханизм 16 изменения шага винта.Таким образом, управление силовой65 установкой осуществляется с помощью787266 Формула изобретения ВНИИПИ Заказ 8252/16 Тираж 497 Подпксно Ф 4 илиал ППП Патент ,г.ужгород,ул.Проектная,воздействия на один. орган управления,что значительно упрощает операторууправление,Введение программ экономичной работы установки как на малых, так нна больших нагрузках обеспечиваетэксплуатацию главного двигателя наоптимальных режимах и повьааает экономичность работы силовой установки. Система управления судовым главным двигателем и винтом регулируемого шага, содержащая блок задания режимов работы, соединенный с програмным устройством, первый выход которого соединен с одним из входов регулятора нагрузки, другой вход которого подключен к датчику нагрузки главного двигателя, снабженного всережим-, ным регулятором, а выход - к одному из входов блока сравнения, другой вход которого соединен с датчиком шага винта,и коммутатор, выход которого соединен с исполнительным механизмом изменения шага винта, о т л ич а ю щ а я с я тем, что, с целью повьыения экономичности силовой установки, программное устройство системы состоит из соединенных с;его входом блока програаа экономичной работы установки на малых нагрузках, блока оптимальной програюаа управления частотой вращения двигателя и подключенных к его выходу блока программ экономичной работы установки, блока програьею загредетельно характеристики двигателя и блока переключения прографаа, а также блока выбора программ, входы которого софдйнены с выходами блоков програм 4 эконо.мичной работы и эаградительна характеристики двигателя, а выхсщ бяока выбора програьи соедннен с первым выходом програианого устройства,при этом выходы блока переключения врог рамм н блока программ экономичноработы установки на малых нагрузках соединены соответственно со вторым и третьим выходами программного устройства и подключены к первому я второ О му входам коммутатора, третий входкоторого соединен с выходом блока сравнения. Источники инФормации,принятые во внимание при экспертизе 1. Авторское свндЕтеЛЬствО СССР В 379452, кл. В 63 И 21/22, 09.06. 71. 2. Авторское свидетельство СССР 9 575268, кл. В 63 Н 21/22, 27.1075
СмотретьЗаявка
2726412, 19.02.1979
ПРЕДПРИЯТИЕ ПЯ Г-4372
ЗАЩЕРИНСКИЙ АНАТОЛИЙ ВИТАЛЬЕВИЧ, МИХАЛЕВ ВИКТОР ДМИТРИЕВИЧ, ПАВЛОВ ВАЛЕНТИН ЕГОРОВИЧ, СКВОРЦОВ ЕВГЕНИЙ ИВАНОВИЧ
МПК / Метки
МПК: B63H 21/22
Метки: винтом, главным, двигателем, регулируемого, судовым, шага
Опубликовано: 15.12.1980
Код ссылки
<a href="https://patents.su/3-787266-sistema-upravleniya-sudovym-glavnym-dvigatelem-i-vintom-reguliruemogo-shaga.html" target="_blank" rel="follow" title="База патентов СССР">Система управления судовым главным двигателем и винтом регулируемого шага</a>
Система управления главными дмигателями судовой силовой установки и винтом регулируемого шага

Номер патента: 856894
Опубликовано: 23.08.1981
Авторы: Богданов, Былин, Прохоренков, Филиппов, Фрейдзон
МПК: B63H 21/22
Метки: винтом, главными, дмигателями, регулируемого, силовой, судовой, установки, шага
...значениях возмущающихвоздействий, которые поступают от датчиков дифферента 24 судна, первойпроизводной 25 дифферента и скорости вертикального 26 перемещения цент.ра тяжести судна, которая с выходаблока 23 прогнозирования возмущающихвоздействий поступает по каналу 22связи на вход УВУ предварительнопройдя через коммутатор, аналого-цифр ровой преобразователь, преобразователь кодов) .В результате полученной информации о текущих и прогнозируемых значениях возмущающих воздействий УВУорганизует управление винтом 4 регулируемого шага путем подачи управляющего воздействия на механизм 34изменения шага, посредством блока 33 1 О управления механизмом изменения шага,Суть управления сводится к отслеживанию волны по прогнозируемому...
Устройство формирования программы работы электропривода шахтной подъемной установки
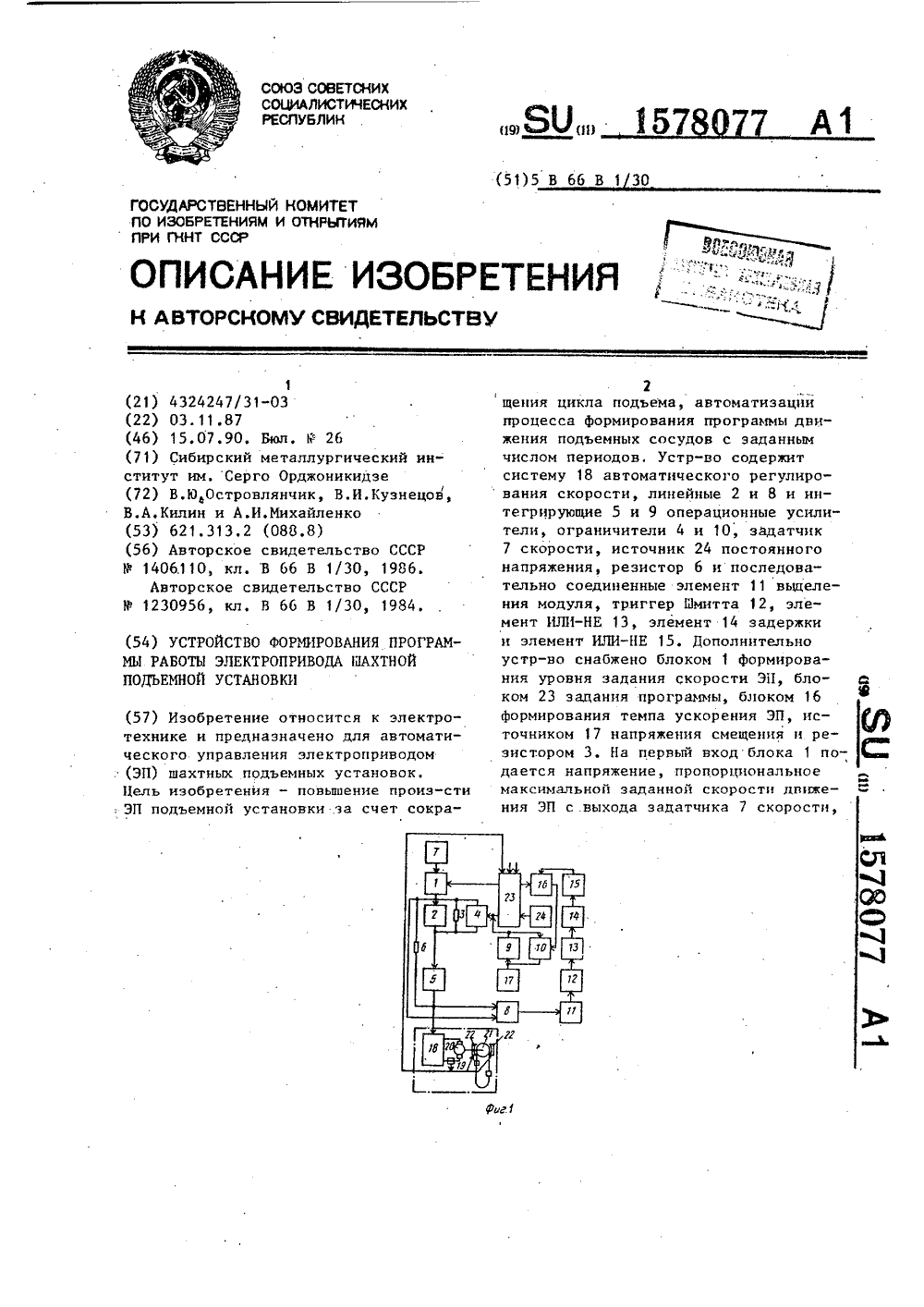
Номер патента: 1578077
Опубликовано: 15.07.1990
Авторы: Килин, Кузнецов, Михайленко, Островлянчик
МПК: B66B 1/30
Метки: подъемной, программы, работы, установки, формирования, шахтной, электропривода
...второй линейный операционный усилитель 8 и элемент 11 выделения модуля Формируют сигналы управления (Н , Ц ) такими, что триг гер 12 не срабатывает (Н), Поэтому состояние логических элементов 13-15 и.опорное напряжение Ц 1 не изменяются. Под действием напряжения Б, при максимальном опорном напряжении Ц , на вход первого интегрирующего операционного усилителя 5 подается максимальное напряжение Б и выходное напряжение Бш нарастает с темпом, соответствующим максимальному значеншо,производной тока якорной цепи, определяемым быстродействием системы 18 автоматического регулирования скорости.1 45Таким образом, сокращение циклаподъема достигается в этом режиме .уменьшением времени на растормаживание подъемной машины за счет увеличения...
Система управления главными двигателями судовой силовой установки и винтом регулируемого шага

Номер патента: 990587
Опубликовано: 23.01.1983
Авторы: Богданов, Былин, Прохоренков, Фрейдзон
МПК: B63H 21/22
Метки: винтом, главными, двигателями, регулируемого, силовой, судовой, установки, шага
...и механизм 34изменения шага винта, датчики глубины 35 погружения трала, глубины36 хода трала, глубины 37 под килем,длины 38 ваерон, блок 39 прогнозиро,вания движения трала, регуляторы 40частоты вращения траловой лебедкии траловую лебедку 41, датчики 42тяговых усилий на ваерах,Система управления работает следующим образом.После запуска двигателей 1 и 2и ввода их в режим, н зависимости от положения эадатчика 30 режима работы, управляющее вычислительное устройство 21 (УВУ) получает соответствующую команду для реализации законов упранления главными двигателями винтом регулируемого шага,двигателями траловой лебедки, с учетом информации о текущих и прогнозируемых значениях возмущающих воздейстний, которые поступают от датчиков 24 дифферента...
Уплотнение жидкостного стыка гильзы и блока двигателя внутреннего сгорания

Номер патента: 909257
Опубликовано: 28.02.1982
МПК: F02F 11/00
Метки: блока, внутреннего, гильзы, двигателя, жидкостного, сгорания, стыка, уплотнение
...упругое антикавитационное кольцо 1 расположенноемежду гильзой 2 и блоком 3, в его расточке 4, которая открыта в сторону рубашки 5 охлаждения. На поверхности расточки блока, обращенной к гильзе, примерно в ее серецине, выполнен кольцевойвыступ 6 (фиг. 2). Кольцо 1 имеет кольцевую канавку 7, сопрягаемую с выступом6 в расточке блока, а с противоположнойстороны - канавку 8, глубина которойменьше, чем глубина канавки 7. Утолщенные части верхняя 9 и нижняя 10 кольца 1 в свободном состоянии имеют ок 3 9092 руглое поперечное сечение. Наружный диаметр кольца 1 в свободном состоянии меньше диаметра расточки.Монтаж узла осуществляется следующим образом.5Антикавитвционное кольцо 1 устанвв - ливают в блок 3, как показано на фиг, 2. При установке...
Устройство для управления шаговым двигателем с дроблением шага

Номер патента: 909784
Опубликовано: 28.02.1982
Автор: Арутюнян
МПК: H02P 8/22
Метки: двигателем, дроблением, шага, шаговым
...превышающую время переходных процессов триггеров, вырабатывает на своем выходе единичный импульс и,тем самым, обеслечивает передачу первого кодового набора счетчика 7 через элементы И 6 в распределитель 5. Зто приводит к созданию в распределителе 5 режима высокочастотной (с частотой Т) циркуляции по разрядам укаэанного кода и, стало быть, генерации импульсов со скважностью 8 на прямом выходе первого разряда и 8/7 на его инверсном выходе, Эти им5 9097пульсы, проходя через элементы И 1к усилителям мощности 3, создает токи величиной 7/81 Н в первой Фазеи 1/81 Н во второй Фазе(11 и 1).(фиг. 2), где 1 Н - максимальное значение тока в фазе.Во втором такте работы устройстватриггер 9 переходит в нулевое состояние. От положительного...
Предыдущий патент: Способ изготовления сборных неразъемных гребных винтов и рабочих колес
Следующий патент: Движительно-рулевое устройство
Случайный патент: Аэрозольный ингаляторфшджоегт