Устройство формирования программы работы электропривода шахтной подъемной установки
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1578077
Авторы: Килин, Кузнецов, Михайленко, Островлянчик

Текст
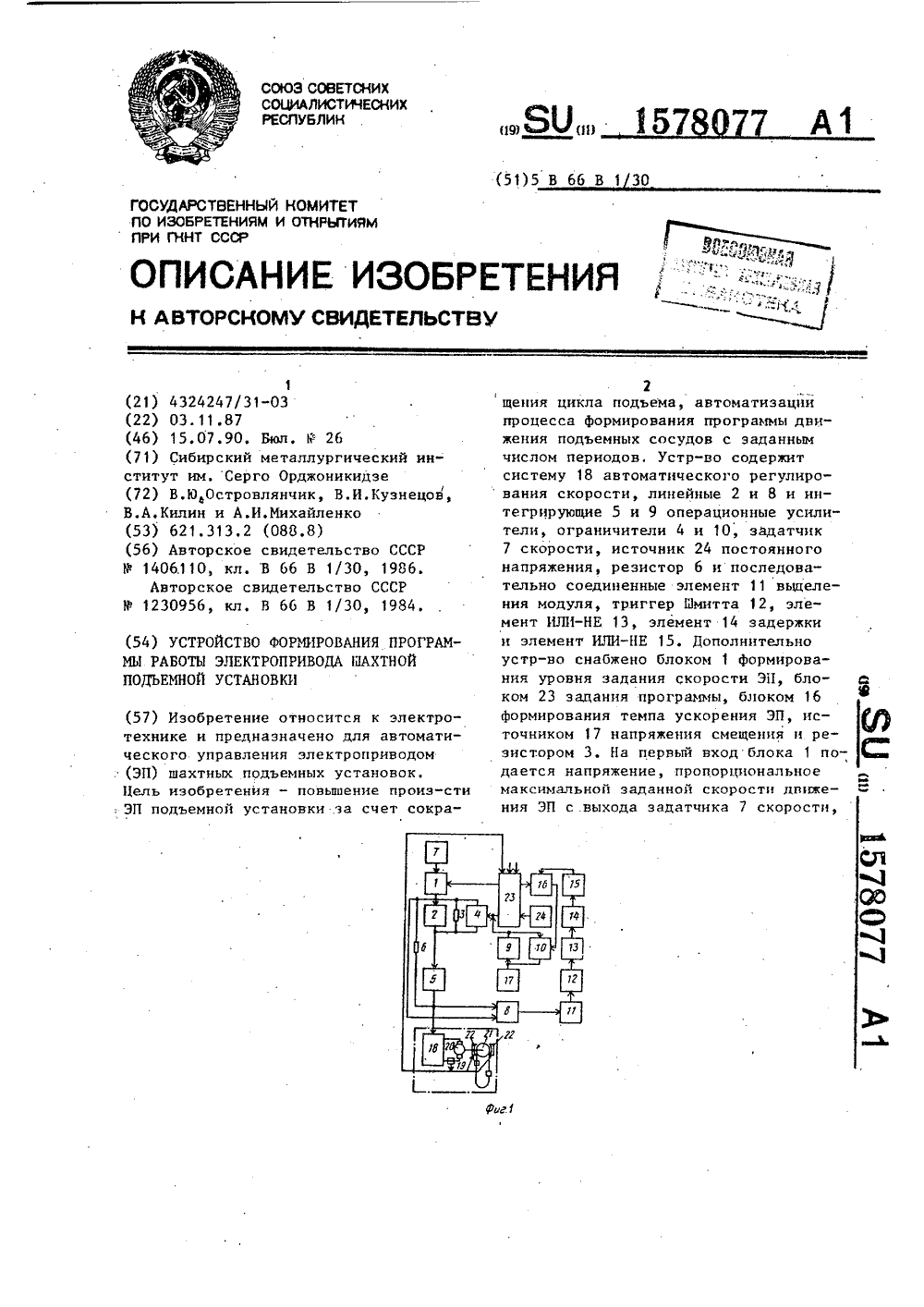
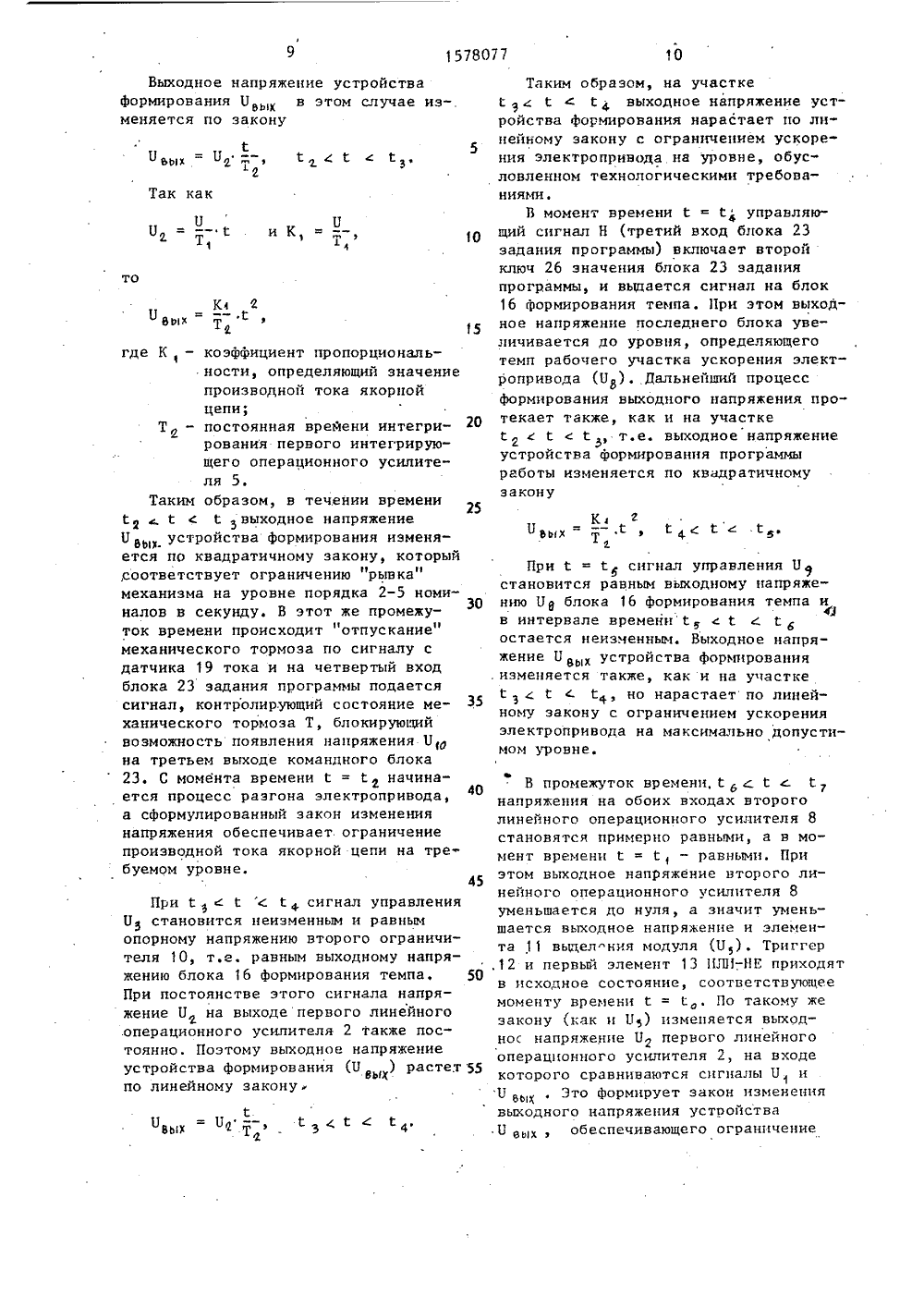
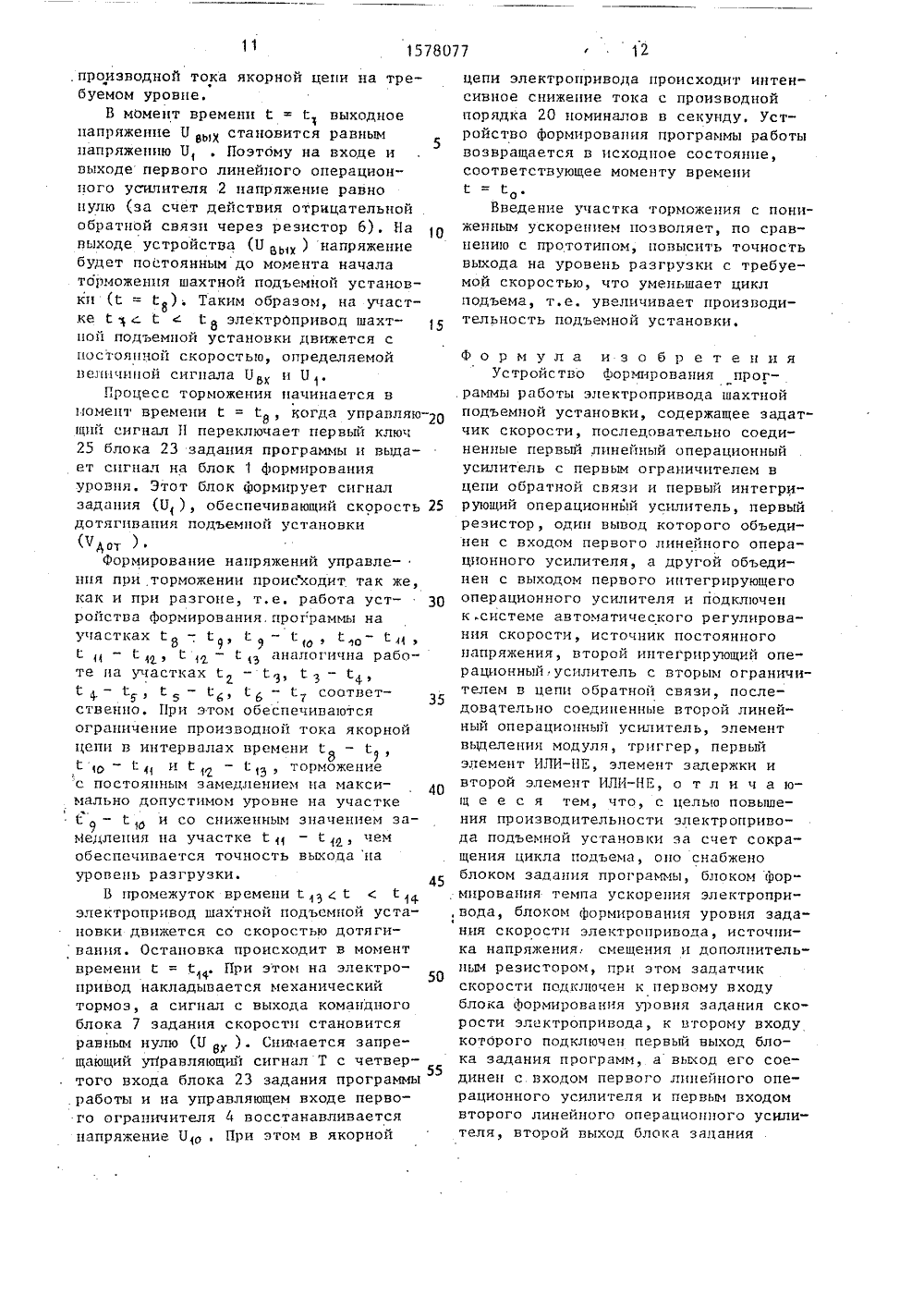
(51)5 В 66 В 1 ГОСУДАРСТВЕННЫЙПО ИЗОБРЕТЕНИЯМ ИПРИ ГКНТ СССР ИТЕТРытиям ИСАНИЕ ИЗОБРЕТЕНИ нецо(57) Изобретение технике и предна ческого управлен (ЭП) шахтных под Цель изобретения . ЭП подъемной уст относится к электроначено для автоматия электроприводом емных установок.повышение произ-сти нонки .за счет сокраСЛ 3 А ВТОРСКОМУ СВИДЕТЕЛЬСТВ(56) Авторское свидетельство СУ 1406.110, кл. В 66 В 1/30, 19Авторское свидетельство СССВ 1230956, кл, В 66 В 1/30, 19(54) УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММЫ РАБОТЫ ЭЛЕКТРОПРИВОДА НАХТНОЙПОДЪЕМНОЙ УСТАНОВКИ 2 щения цикла подъема, автоматизации процесса формирования программы движения подъемных сосудов с заданным числом периодов. Устр-во содержит систему 18 автоматического регулирования скорости, линейные 2 и 8 и интегрирующие 5 и 9 операционные усилители, ограничители 4 и 10, задатчик 7 скорости, источник 24 постоянного напряжения, резистор 6 и последовательно соединенные элемент 11 выделения модуля, триггер Нмитта 12, элемент ИЛИ-НЕ 13, элемент 14 задержки и элемент ИЛИ-НЕ 15. Дополнительно устр-во снабжено блоком 1 формирования уровня задания скорости ЭП, бло- а ком 23 задания программы, блоком 16 формирования темпа ускорения ЭП, источником 17 напряжения смещения и резистором 3. На первый вход блока 1 по- С дается напряжение, пропорциональное максимальной заданной скорости движения ЭП с.выхода задатчика 7 скорости,1578077 . 10 а на второй - с первого выхода блока23," Выход блока 1 связан напрямую свходом первого линейного операционного усилителя 2 и через резистор 6подключен к соответствующим входамусилителя 8. К входам блока 16 подключены выходы блока 23 и элементаИЛИ-НЕ 15, а выход блока 16 связанс ограничителем 10 в цепи обратнойсвязи усилителя 9, подключенного кблоку 23 и к ограничителю 4 в цепиобратной связи усилителя 8. Увеличе Изобретение относится к электротехнике, а именно к системам автоматического управления электроприводом, и может быть использовано в системах . автоматизации шахтных подъемных уста-новок.Цель изобретения - повьппение производительности электропривода подъемной установки за счет сокращения цик 11 а подъема, автоматизации процесса формирования программы движения подъемныхсосудов с заданным числом Периодов.На фиг. 1 приведена общая схема устройства формирования программы работы; на фиг. 2 - 4 - схемы блока Задания программы, блока формироваНия уровня и блока формирования темпа ускорения; на фиг. 5 и 6 - графики 35 изменения во времени сигналов управления, формируемых устройством.На чертеже сигналы управления обозначены: Н- входной, на выходе командного блока задания скорости; Б и - выходной; 1 - по току якорной цепи; Н - по пути, пройденного сосудами; Т - сигнал контролируюций состояние механического тормоза; Б на входе первого линейного операционного усилителя; 0 - на выходе первого линейного операционного усилителя;11 - на выходе элемента выделенияЪмодуля; 0 - на выходе триггера Шмитта; Бу - на выходе первого элемента 50 ИЛИ-НЕ; Б - на выходе элемента задержки; 07 - на выходе второго элементаИЛИ-НЕ; Б - на выходе блока формироф 8нация темйа ускорения электропривода;0 - на выходе второго интегрирующе 559го операционного усилителя; Н 1 О - на третьем выходе блока задания программы; Б 1 - суммарное опорное напряжение опорного напряжения ограничителя4 при прохождении сигнала от источника 24 через блок 23 при наличии наего входах (втором и четвертом) соответствующих сигналов приводит к уве"личению скорости нарастания выходно.го сигнала. усилителя 5. При этомувеличивается скорость нарастаниятока в якорной цепи и уменьшается время на растормаживание машины, чтосокращает время цикла подъема. 6 ил. ние 09 + Б,о; С- фиксированные моменты времени. Устройство содержит блок 1 формирования уровня задания скорости электропривода, выход которого соединен с входом первого линейного операционного усилителя 2, В цепь его обратной связи включены резистор 3 и первьп ограничитель 4. Выход первого линейного операционного усилителя 2 соединен с входом первого интегрирующего операционного усилителя 5, выход которого через резистор 6 обратной связи подключен к входу первого линейного операционного усилителя 2 и является выходом устройства формирования программы работы. Входное напряжение, пропорциональное максимальной заданной скорости дви" жения электропривода, подается с выхода задатчнка 7 скорости на первьп вход блока 1 формирования уровня за-дания, являющегося входом устройства формирования программы работы.Опорное напряжение на управляющий вход первого ограничителя 4 поступает со схемы регулируемого напряжения ограничения , содержащей второй линейный операционный усилитель 8 и второй интегрирующиц операционньп усилитель 9 с вторым ограничителем 10, а также элемент 11 выделения модуля, связанный своим выходом с цепью элементов, выполняющих логические функции. Указанная цепь содержит последовательно соединенные триггер 12, первый элемент ИЛИ-НЕ 13, элемент 14 задержки и второй элемент ИЛИ-НЕ 15. Выход последнего элемента соединен с первым нходом блока 16 формирования темпа ускорения (замедления) электро 5 1.5780привода. Выхоц блока 16 формированиятемпа подключен к управляющему входувторого ограничителя.Вход второго интегрирующего опера 5ционного усилителя 9 связан с источником 17 постоянного напряжения смещения, а выход - с управляющим входомпервого ограничителя 4. Выход блока1 формирования уровня задания соединен с первым входом второго линейногооперационного усилителя 8Выход первого интегрирующего операционногоусилителя 5 подключен к второму входувторого линейного операционного усилителя 8 и к входу системы 18 автоматического регулирования скоростиэлектропривода, которая через датчик19 тока соединена с подъемным электродвигателем 20. Последний приводит 20в движение барабан 21 шахтной подъемной установки, оснащенной тормозом 22.Первый выход блока 23 задания про-.граммы работы соединен с вторым входом блока 1 формирования .уровня задания, второй выход - с вторым входомблока 16 формирования темпа, а третий - с управляющим входом первогоограничителя 4. Первый вход блока 23задания программы движения соединенс выходом источника 24 постоянногонапряжения, а второй вход - с датчиком 19 тока. На третий вход подаетсясигнал управления по пути, а на четвертый - сигнал, контролирующий состояние механического тормоза.Блок 23 программы включает в себяпервый, второй, третий, четвертыйи пятый ключи 25-29. Управляющие входы первого и второго ключей 25 и 26 соединены с третьим входом блока 23 задания программы, а коммутирующие выхода подключецы к первому и второму выходам блока 23 соответственно. Коммутирующий выход третьего ключа 27 45 соединен с первым выходом блока 23,. первый вход которого через коммутирующий выход четвертого ключа 28 соединен с его третьим выходом, а его ,второй вход через коммутирующий выход пятого ключа 29 соединен с,управ"ляющими входами третьего и четвертого ключей 27 и 28. Управляющий вход пятого ключа 29 соединен с четвертым входом блока 23 задания программы.Блок 1 формирования уровня задания (фиг. 3) представляет собой це-, почку последовательно соединенных резисторов. Например, с помощью пер 77вого резистора можно, задавая величину напряжения, (фцг, 3) определить максимальную скорость движения подъемной установки. Тогда второй резистор определяет ток растормаживания, в случае, если оц расшунтирован параллельно включенным коммутирующим выходам третьего ключа 27 блока 23 задания программы, а коммутирующий выход первого ключа 25 данного блока, включенный параллельно третьему резистору блока 1 формирования уровня, определяет пониженную скорость движеция. В случае необходимости задания дополнительных уровней скоростей необходимо увеличить число последовательно включенных резисторов в блоке 1 формирования уровня, которые шунтируются соответствующим ключом блока 23 задания программы, необходимое количество ключей также должно быть включено дополнительно,Блок 16 Формирования темпа (фиг. 4; представляет собой цепочку последовательно соединенных резисторов, параллельно которым включены коммутирующие выходы ключей блока 23 задания программы. Для формирования тахограммы необходим один резистор и один второй ключ 26, с помощью которых задаются два темпа тахограммы - рабочий и пониженный.Устройство работает следующим образом. В исходном состоянии (момент времени), когда на привод положен механический тормоз ц напряжение 11на выходе командного блока 7 заданияскорости равно нулю (О ь = 0), ца выходе и входе второго линейного операционного усилителя Б также напряжение отсутствует,нет его и на выходе элемента 11 вьщелеция модуля (11 = 0), Поэтому ца выходе триггера 12 - "0", т.е.низкий уровень сигнала Ж) . Тогда на выходе первого элемента 11 ЛИ-НГ 13 - "1", т.е. высокий уровень сигнала Й). На выходе элемента 14 задержки -0" О 16), а на выходе второго элемента ИЛ 11-НЕ 15 - "1" (117), Блоком 16 формирования темпа определяется величина напряжения ограничения ПВ, которая соответствует низкому темпу ускорения, т.е. малому значенйю рывка электропривода. Так как,ца входе второго интегрирующего операционного усилителя 9 постоянно прц 1578077сутствует сигнал от источника 17 напряжения смещения, то выходное напря" жение У, этого второго интегрирующего операционного усилителя 9 равно на 5 пряжению ограничения Н. Напряжение Б поДается в качестве опорного на управляющий вход первого ограничителя 4. На этот же вход подается напряжение Бо с третьего выхода командно го блока 23 задания программы, которое Формируется выходным нагряжением источика 24 постоянного напряжения и соответствует максимальному выходному напряжению первого ограничителя 4. 15 ри наличии постоянного напряжения ограничения на первом линейном операционном усилителе 2 и отсутствии сигнала на входе Я ь = О), на его выходе, а следовательно, и на выходе 20 устройства Формирования, сигнал отсут. . ствует (Б = О, Бы = 0) .Сигнал на движение электропривоца подается командным блоком 7 задания скорости в момент времени= С25 (напряжение Б ). При этом блок 1 Формирования уровня, второй линейный операционный усилитель 8 и элемент 11 выделения модуля Формируют сигналы управления (Н , Ц ) такими, что триг гер 12 не срабатывает (Н), Поэтому состояние логических элементов 13-15 и.опорное напряжение Ц 1 не изменяются. Под действием напряжения Б, при максимальном опорном напряжении Ц , на вход первого интегрирующего операционного усилителя 5 подается максимальное напряжение Б и выходное напряжение Бш нарастает с темпом, соответствующим максимальному значеншо,производной тока якорной цепи, определяемым быстродействием системы 18 автоматического регулирования скорости.1 45Таким образом, сокращение циклаподъема достигается в этом режиме .уменьшением времени на растормаживание подъемной машины за счет увеличения скорости нарастания тока якорнои 50цепи, путем подачи дополнительногонапряжения от источника 24 постоянного напряжения на первый ограничитель 4, что приводит к увелчению скорости нарастания выходного напряже-.,)5ния Ны, а следовательно, к увеличению скорости нарастания тока в якорной цепи подъемного электродвигателя 20, Н7 Т,где Т - постоянная времени интегрирования второго интегрирующего операционного усилителя 9.Поэтому же закону изменяется и напряжение ограничения первого линейного операционного усилителя 2, а значит и его выходное напряжение Н ц = е Т 1с При достижении током якорной цепи подъемного электродвигателя значения, соответствующего крутящему моменту, уравновешивающего концевую нагрузку, управляющий сигнал 1 (второй вход командного блока 23 задания программы) переключает третий и четвертый ключи 27 и 28 блока 23 задания программы, что вызывает снятие напряжения Но с управляющего входа первогоограничителя 4 и устанавливает значение напряжения У на уровне, соответствующем максимальной скорости движения подъемных сосудов. Одновременно с этим (момент времениГ) па входе и выходе второго линейного операционного усилителя 8, а значит и на выходе элемента 11 выделения модуля появляется напряжение Бэ, обеспечивающее срабатывание триггера, 12 (ц). Это приводит к изменению состояния первого элемента ИЛИ-НЕ 13 (Н) .Элемент 14 задержки Формирует импульс длительностью несколько микросекунд (Бб) и сигнал на выходе второ-. го элемента ИЛИ-НЕ 15 исчезает на это время (07), т,е. исчезает напряжение на втором ограничителе 10, втором интегрирующем операционном усилителе 9, первом ограничителе 4, Таким образом, в момент времени= : напряжение Б равно нулю, так как отсутствует опорное напряжение на первом ограничителе 4При появлении опорного папряжения на втором ограничителе 10 (через несколько микросекунд спустя время С), напряжение на выходе второго интегрирующего операционного усилителя 9 начинает линейно нарастать.с постоянной времени Т, соответствующей выбранному значению производной тока якорной цепи (Б), т.е."2Так как11 П10тоКа 2Выл2где К, - ко эффициент пропорцио нал ьности, определяющий значениепроизводной тока якорнойцепи;Т " постоянная времени интегри 2рования первого интегрирующего операционного усилителя 5.Таким образом, в течении времениЕ 2 . Е ( Евыходное напряжениеУи, устройства Формирования изменяется по квадратичному закону, который,соответствует ограничению "рывка"механизма на уровне порядка 2-5 номиналов в секунду. В этот же промежуток времени происходит "отпускание"механического тормоза по сигналу сдатчика 19 тока и на четвертый входблока 23 задания программы подаетсясигнал, контролирующий состояние ме- З 5ханического тормоза Т, блокирующийвозможность появления напряжения Уна третьем выходе командного блока23. С момента времени Е = Е 2 начинается процесс разгона электропривода,а сформулированный закон изменениянапряжения обеспечивает ограничениепроизводной тока якорной цепи на требуемом уровне,45При Е( Е "( Е+ сигнал управленияП становится неизменным и равнымопорному напряжению второго ограничителя 10, т.е. равным выходному напряжению блока 16 Формирования темпа. 50При постоянстве этого сигнала напряжение П на выходе первого линейного.операционного усилителя 2 также постоянно. Поэтому выходное напряжениеустройства формирования (У 8, ) растет 55вьюпо линейному закону10Таким образом, на участкевыходное напряжение устройства формирования нарастает по линейному закону с ограничением ускорения электропрнвода на уровне, обусловленном технологическими требованиями,В момент времени ЕЕ управляющий сигнал Н (третий вход блока 23 задания программы) включает второй ключ 26 значения блока 23 задания программы, и выдается сигнал на блок 16 Формирования темпа. При этом выходное напряжение последнего блока увеличивается до уровня, определяющего темп рабочего участка ускорения электропривода (Бв). Дальнейший процесс формирования выходного напряжения протекает также, как и на участкеЕ 2 с Е с Е , т.е. выходное напряжение устройства формирования программы работы изменяется по квадратичному законуК гфд Тф 4( ЕзПри Е = Е сигнал Управления Б становится равным выходному напряжению УЕ блока 16 формирования темпа и43в интервале времени Е с Е (остается неизменным. Выходное напряжение Б , устройства форлеирования изменяется также, как и на участкес Е , но нарастает по линейному закону с ограничением ускорения электропривода на максимально допустимом уровне,ФВ промежуток времени, Е 6 ( Е с напряжения на обоих входах второго линейного операционного усилителя 8 становятся примерно равными, а в момент времени Е = Е, - равными. При этом выходное напряжение второго линейного операционного усилителя 8 уменьшается до нуля, а значит уменьшается выходное напряжение и элемента 11 выдел"ния модуля (У). Триггер .12 и первый элемент 13 ИЛИ-,НГ приходят в исходное состояние, соответствующее моменту времени Е = Е. По такому же закону (как и П) изменяется выходнос напряжение П 2 первого линейного операционного усилителя 2, на входе которого сравниваются сигналы У и У ы . Это формирует закон изменения выходного напряжения устройства Б ы, обеспечивающего ограничение,производной тока якорной цепи на требуемом уровне.В момент временивыходноенапряжение О В,э становится равнымнапряжению Б . Поэтому на входе ивыходе первого линейного операционного усилителя 2 напряжение равнонулю (за счет действия отрицательной .обратной связи через резистор 6). Навыходе устройства (Б ь ) напряжениебудет постоянным до момента началаторможения шахтной подъемной установки (; =). Таким образом, на участ.ке 1с С8 электропривод шахтной подъемной установки движется спостоянной скоростью, определяемойвеэшчицой сигнала 13 и Ц 1.Процесс торможения начинается вэкэмецт времени= С, когда управляю щиц сигнал П переключает первый ключ25 блока 23 задания программы и выдает сигнал на блокФормированияуровня. Этот блок Формирует сигналзадания Щ ), обеспечивающий скорость 25дотягцвапия подъемцоц установки(д этФормирование напряжений управления при торможении происходит так же,как и при разгоне, т.е. работа устройства Формирования.программьэ наасгках 8 - -- :,э мо "1аналогична работе ца участках- , Т З - 4.:7 соответственно. При этом обеспечиваютсяограничение производной тока якорнойцепи в интервалах времени :и Т 1 - С , торможениес постоянным замедлением ца макси Омально допустимом уровне на участке : 9 - ,э и со сэижецным значением замедления ца участке1 - с, чем обеспечивается точность выхода ца уровень разгрузки. 45В промежуток времени Т 1 ( С ( электропривод шахтной подъемной установки движется со скоростью дотяги вания. Остановка происходит в момент времени Е = В . При этом на электро 1привод накладывается механический тормоз, а сигнал с выхода командного блока 7 задания скорости становится равным нулю). Снимается запрещающий утравляющий сигнал Т с четвертого входа блока 23 задания программы ,работы и на управляющем входе первого ограничителя 4 восстанавливается напряжение БоПри этом в якорной цепи электропривода происходит интенсивное снижение тока с производной порядка 2 О номиналов в секунду. Устройство формирования программы работы возвращается в исходное состояние, соответствующее момецту времениоВведение участка торможения с пониженным ускорением позволяет, по сравнению с прототипом, повысить точность выхода на уровень разгрузки с требуемой скоростью, что уменьшает цикл подъема, т.е. увеличивает производительность подъемной установки. Формула и з о б р е т е ц и яУстройство Формирования программы работы электропривода шахтной подъемной установки, содержащее задатчик скорости, последовательно соединенные первый линейный операционный усилитель с первым ограничителем в цепи обратной связи и первый интегрирующий операционный усилитель, первый резистор, один вывод которого объединен с входом первого линейного операционного усилителя, а другой объединен с выходом первого интегрирующего операционного усилителя и подключен к,системе автоматического регулирования скорости, источник постоянного напряжения, второй интегрирующий операционный;усилитель с вторым ограничителем в цепи обратной связи, последовательно соединенные второй линейный операционный усилитель, элемент выделения модуля, триггер, первьнэ элемент ИЛИ-НП, элемент задержки и второй элемент ИЛИ-НГ, а т л и ч а ющ е е с я тем, что, с целью повышения производительности электропрцвода подъемной установки за счет сокращения цикла подъема, оцо снабжено блоком задания программы, блоком рормцровация темпа ускорения электропри,вода, блоком формирования уровня зада- Фния скорости электропривода, источника напряжения. смещения и дополцительцым резистором, при этом задатчик скорости падкэиочен к первому входу блока формирования уровня задания скорости электропривода, к второму входу которого подключен первый выход блока задания программ, а выход его соединен с входом первого линейного операционного усилителя и первым входом второго линейного операционного усилителя, второй выход блока заданияпрограммы соединен с первым входомблока формирования темпа ускоренияэлектропривода, а к входу блока задания программы подключен источникпостоянного напряжения, источник постоянного смещения подключен к входувторого интегрирующего операционного усилителя, .выход которого, а также третий выход блока задания програмОмы объединены и подключены к первому ограничителю, выход первого интегрирующего операционного усилителя подключен также к второму входу второголинейного операционного усилителя,выход блока формирования темпа ускорения электропривода подключен к второму ограничителю, а второй резисторвключен параллельно первому ограничителю в обратную связь первого линейного операционного усилителя.1578077 и вска Корре аказ 188 б Тираж б 01 Подписное1 ИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г Ужгород, ул. Гагарина,Составитель О.Капканедактор И.Касарда Техред Л.Олийнык ЫдюЬ ЬАз 64а 6
СмотретьЗаявка
4324247, 03.11.1987
СИБИРСКИЙ МЕТАЛЛУРГИЧЕСКИЙ ИНСТИТУТ ИМ. СЕРГО ОРДЖОНИКИДЗЕ
ОСТРОВЛЯНЧИК ВИКТОР ЮРЬЕВИЧ, КУЗНЕЦОВ ВИКТОР ИВАНОВИЧ, КИЛИН ВЛАДИМИР АЛЕКСЕЕВИЧ, МИХАЙЛЕНКО АЛЕКСАНДР ИВАНОВИЧ
МПК / Метки
МПК: B66B 1/30
Метки: подъемной, программы, работы, установки, формирования, шахтной, электропривода
Опубликовано: 15.07.1990
Код ссылки
<a href="https://patents.su/8-1578077-ustrojjstvo-formirovaniya-programmy-raboty-ehlektroprivoda-shakhtnojj-podemnojj-ustanovki.html" target="_blank" rel="follow" title="База патентов СССР">Устройство формирования программы работы электропривода шахтной подъемной установки</a>
Устройство адаптивной настройки статических параметров многосвязной автоматической системы

Номер патента: 1596310
Опубликовано: 30.09.1990
МПК: G05B 23/00
Метки: автоматической, адаптивной, многосвязной, настройки, параметров, системы, статических
...При возникновении отклонения коэффициента К, от требуемого значени, получаемого на основании уравнения (6), блок 17 Формирует новое значение параметра р, на основании ко" торого Формируется новое значение 1 О сигнала задания. Сигнал рассогласования дЧ, устраняется сгедящей системой, которая устанавливает регулятор 22 в новое, установившееся, значе" ние. Таким образом, в процессе функционирования первого контура управления системы в результате выполнения алгоритмов (6) и (7) в блоке 17 и наличия контура адаптации осуществляется компенсация параметрических возмущений коэффициента Б, первого обьекта за счет непрерывной настройки коэффициента р модели. При этом в случае использования астатической следящей системы ошибка по положению...
Устройство для формирования сигналов задания тока и частоты при управлении автономным инвертором тока

Номер патента: 1739458
Опубликовано: 07.06.1992
МПК: H02M 7/48
Метки: автономным, задания, инвертором, сигналов, управлении, формирования, частоты
...временной ошибки фактического тока по сравнению с заданным для двигательного и генераторного режимов. Селекция выходных сигналов производится в узле 21 выделения корректирующих сигналов, на выход формирователя 11 корректирующих сигналов поступают сигналы ошибки только для одного задания фазы тока в зависимости от задания режима работы (двигательный, тормозной) с выхода узла 14 блокировки, Сигналы ошибки с выходов формирователя 11 корректирующих сигналов через узел 13 отпускания поступают на входы корректирующего регулятора 12 угла. Если вектор фактического тока двигателя опережает заданный вектор тока, необходимо снизить выходную частоту инвертора, а если отстает - увеличить. Указанная операция регулирования частоты осуществляется в...
Блок формирования модуля

Номер патента: 1536473
Опубликовано: 15.01.1990
Автор: Березовский
МПК: H01H 83/20, H02H 3/40
Метки: блок, модуля, формирования
...вход,ток от источника тока, проходя через диод 5, резисторы 6 и 7, создает на неинвертирующем входе усилителя 2 некоторое некоторое напряжение вследствие чего на резисторе 11 возникает .такое же напряжение. Выходящий из инвертирующего входа усилителя 2 ток проходит через резистор 11 и его практически компенсирует ток, проходя" щий в инвертирующий вход усилителя 2 через нелинейный элемент 9 и резистор 10.536473 6 раз (где и с /К(с 2 п, п = 4),компенсирующее напряжение 32 (фиг.2 в).Напряжение 32, складываясь с напряжением 30 второй гармоники, возникающим также без сглаживания (фиг 2 а),образует указанное выходное напряжение 31 второй гармоники, возникающее при наличии сглаживания (фиг .2 б),Положительные полуволны напряжения32...
Блок формирования тока возбуждения для доменного запоминающего устройства

Номер патента: 1065885
Опубликовано: 07.01.1984
Авторы: Антонов, Киселев, Юсупов
МПК: G11C 11/14
Метки: блок, возбуждения, доменного, запоминающего, устройства, формирования
...достигается тем, что в блоке формирования тока возбуждения для доменного запоминающего устройства, содержащем четыре ключевых элемента, включенных в мостовую схему, в одну из диагоналей которой включен источник питания, и два ограничительных элемента в виде обратносмещенных диодов, подключенных соответственно параллельно ключевым элементам в одних смежных плечах мостовой схемы, включенных параллельно источнику питания, причем управляющие входы ключевых элементов, расположенных в противоположных плечах мостовой схемы, объединены попарно и являются входами блока формирования тока возбужения, включен конденсатор параллельно ключевому элементу в других смежных плечах мостовой схемы.Включение конденсатора позволяет устранить переходную...
Решающий усилитель на операционном усилителе

Номер патента: 627485
Опубликовано: 05.10.1978
Авторы: Петров, Попов, Птаховский
МПК: G06G 7/12
Метки: операционном, решающий, усилителе, усилитель
...суммирующим входом операционного усилителя и шиной нулевого потенциала, на порядок повышает точность выполнения операций решающим усилителем. Изобретение может быть использовано прн проектировании новых широкополосных решающих усилителей квк в дискретном, гвк и в интегральном исполнении. Решающий усилитель нв операционномусилителе, содержащий источник смещенияи резисторы, о г л и ч а ю ш и й с ятем, что, с целью повышения точности выполнения операций нв высоких частотах, внего ввепены частотоэависимвя цепь, состоящая кэ разделительного конденсатораи транзистора, и дифференциальный усилитель, инвертируюший вход которого подключен к суммирующему входу операционногоусилителя, неинвергкруюший вход - к шиненулевого потенциала. выход...
Предыдущий патент: Электропривод перематывающего устройства
Следующий патент: Устройство для слива жидкостей из бочек
Случайный патент: Способ получения слоистых изделий