Система управления двигательным действием биологического объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
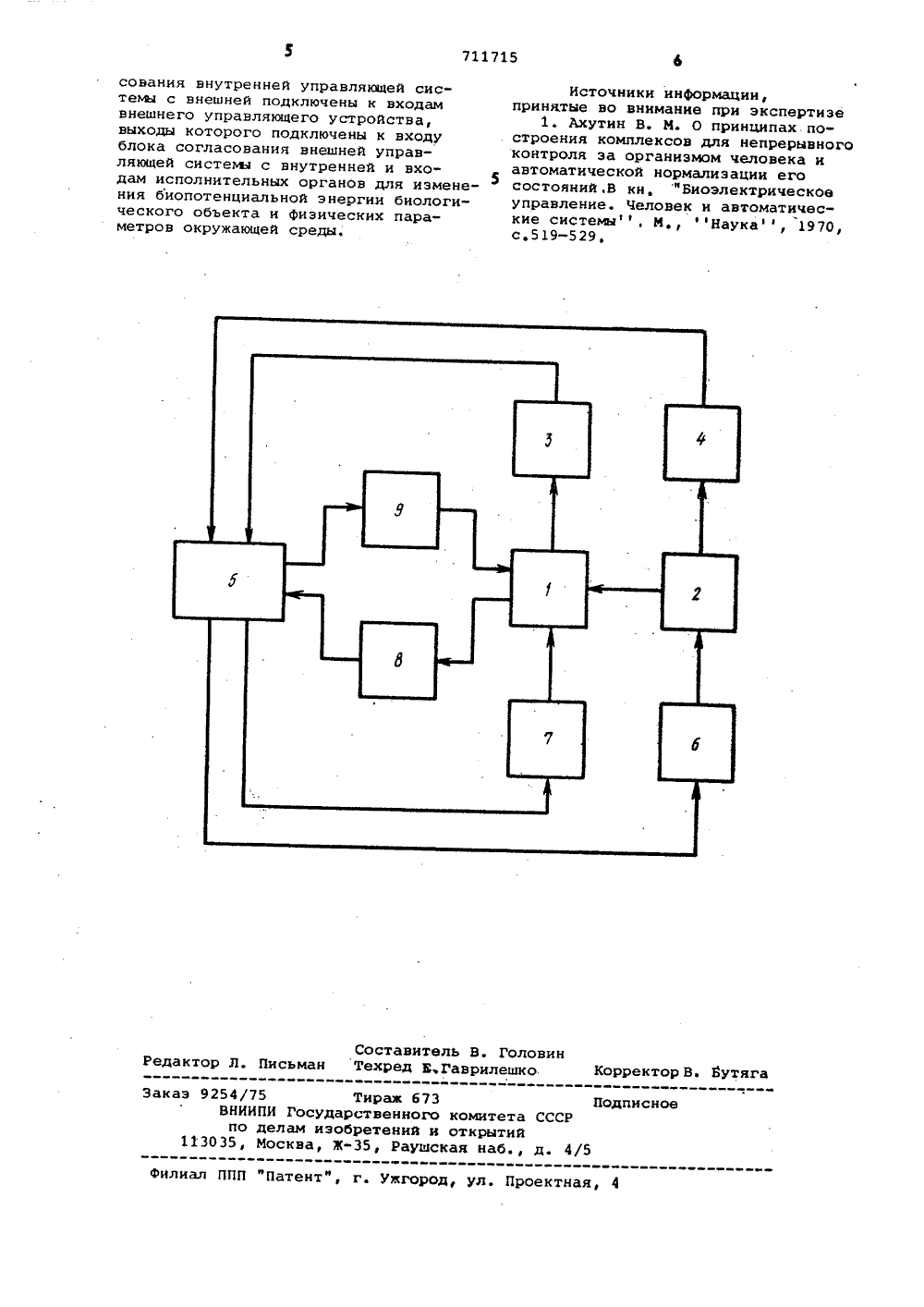
лата. я"фф"ннв те" н,е,тс"иат Союз Советскиа Социалистических Республик(51)М, Кл,3 с присоединением заявки Нов А 61 В 5/10 Государственный комитет СССР по делам изобретений и открытий(088. 8) Дата опубликования описания 231280( 54 ) СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЬНЫМИ ДЕИСТВИЯМИ БИОЛОГИЧЕСКОГО ОБЬЕКТА Изобретение относится к области систем управления двигательными действиями и функциональным состоянием живых организмов и может быть использовано во всех областях двигательной деятельности человека, в частности в тренировочном процессе.Известна система управления двигательными функциями биологическэго объекта, содержащая блок измерения о физических параметров окружающей среды блок измерения биомеханических и медйкобиологических параметров био.логического .объекта, внешнее управляющее устройство, исполнительные 15 органы для изменения физических па.раметров окружающей среды 1Однако, при иследовании биологического объекта, обладающего внутренней энергией, известная систе ма не обеспечивает достижения оптимальных двигательных действий и функционального состояния.Цель изобретения - достижение оп" тимальных двигательных действий и функционального состояния биологического объекта, обладающего внутренней системой управления.Это достигается тем, что в систему введены блоки согласования внут ренней управляющей системы с внешней и внешней управляющей системы с внутренней, исполнительные органы для изменения биопотенциальной энергии биологического объекта. Причем выходы блока измерения биомеханических и медико-биологических параметров биологического объекта и блока согла.ования внутренней управляющей системы с внешней подключены к входам внешнего управляющего устройства, выходы которого подключены к входу блока согласования внешней управляющей системз с внутренней и входам исполнительных органов для изменения биопотенциальной энергии биологического объекта и физических параметров окружающей среды.На чертеже изображена структурная схема системы управления двигательными действиями биологического объекта.Предлагаемая система содержит биологический объект 1 управления с внутренней системой управления, окружающую среду 2, взаимодействующую с биологическим объектом; блок 3 измерения биомеханического н медико-биологических параметров объекта управления; блок 4 измерения физических параметров окружающей среды; внешнее управляющее устройство 5; исполнительные органы 6 для изменения физических параметров окружающей среды; исполнительные органы 7 изменения биопотенциальной энергии биологического объекта, блок 8 согласования внутренней управляющей систеью с внешней и блок 9 согласования внешней управляющей систеьи с внутренней,10С выхода блока 3 измерения элек-, трические сигналы поступают на входы внешнего управляющего устройства 5, состоящего из ЭВМ, работающей в реальном масштабе времени, например ЭВМ М. Кроме того, электрические сигналы, характеризующие состояние внутренней управляющей систеьы биомеханического объекта, а с входов блока 8 согласования внутренней управляющей системы с внешней, таких как, например, электромиограф, поступают,на входы внешнего управляющего устройстна 5, Внешнее управляющее устройство 5 совершает опре- . деленные действия с упомянутой ин- д формацией.Управляющие электрические сигналы с выходов внешнего управлякщего устройства 5 поступают на входы исполнительных органов 6, меняющих величины физических параметров окружающей среды, н качестве которых можно использовать, например, электромоторы, нагреватели и насосы, при помощи которых меняют, например температуру, влажность ноздуха или такие параметры тренажеров, как жесткость и коэффициент трения; входы исполнительных органов 7 управления изменением биопотенциальной энергии объекта управления, в качестве которых 40 можно использовать различныв биостимуляторы, например электромиостимулятор, и входы блока 9 согласования внешней управляющей системы с внутренней, например устройств, действующих на,органы чувстн биологического объекта 1, таких, как световое табло.До начала процесса изменения состояния биологическим объектом 1 во 1 р внешнее управлякщее устройство 5 вводятся программ обработки поступающей н нев информации с блока 3 измерения биомеханических парамвтров объвкта управления, блока 4 измерения физических параметров окружающей среды и программки, регулирующей работу исполнительных органов 6, меняющих величины физических параметров окружающей среды, исполнительных органон 7 управления изменением био потенциальной энергии объвкта .блоков 8 и 9 согласования внутрвйнвй и внешней управляющей систем.Отклонение характеристик биомеханического состояния объекта 1 управления от заданных для данного процесса значений приводит к автоматическому воздействию на объект 1 исполнительных органов. 7 управления изменением биопотенциальной энергии объекта блока 9 согласования внешней управляющей системою с внутренней, Кроме того, данное отклонение приводит в действие исполнительные органы 6, меняющие физические параметры окружающей среды, в соответствии с целями этого процесса изменения биомеханического состояния.При этом, в зависимости от выбранного режима работы одна из управляющих систем будет являться ведущей, выполняющей основные функции управления, другая - корректирующей, устраняющей неточности управления ведущей системы. Такая система управления биомеханическим объектом позволяет корректировать ошйбки управления ведущей системы, что, в частности, дает возможность программировать и поддерживать оптимальный рехим двигательных действий спорт- . смена.Система управления двигательными действиями биологического объекта позволяет восстанавливать утерянные двигательные функции и формировать новые совокупности функциональных состояний и двигательных структур объекта управления, что, например, н приложении к спортивной практике дает возможность интенсифицировать тренировочный процесс и позволяет выполнять спортинные упражнения с рекордными результатами,формула изобретенияСистема управления двигательными действиями биологического объекта, содержащая блок измерения физических параметров окружающей среды, блок измерения биомеханичвских и медико- биологических параметров биологического объекта, внешнее управлялцее устройство, исполнительные органы для изменения физических параметров окружающей среды, о т л и - ч а ю щ а я с я тем, что, с целью достижения оптимальных двигательных действий и функционального состояния биологического объекта, обладающего внутренней системой управления, в нее введены блоки согласования внутренней управляющей системы с внешней и внешней управляющей системы с внутренней, исполнитвльные органы для изменения биопотенциальной энергии биологического объекта, причем выходы блока измерения биомеханических и медико-биологических параметров биологического объекта и блока соглаКорректор В. Зутя писное комитета СССРоткрытийая наб., д, 4 нлиал ППП "Патент", г. ужгород, ул. Проектная, 4 сования внутренней управляющей системы с внешней подключены к входамвнешнего управляющего устройства,выходы которого подключены к входублока согласования внешней управляющей системы с внутренней и входам исполнительных органов для изменения биопотенциальной энергии биологического объекта и физических параметров окружающей среды. аз 9254/75 Тираж б 73 ВНИИПИ Государственного по делам изобретений и 113035, Москва, Ж, РаушсИсточники информации,принятые во внимание при экспертизе1. Ахутин В. М. О принципах построения комплексов для непрерывногоконтроля эа организмом человека иавтоматической нормализации егосостояний,В кн, "Биоэлектрическоеуправление. Человек и автоматические системы, И Наука, 1970,с519-529,
СмотретьЗаявка
2482381, 02.03.1977
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ФИЗИЧЕСКОЙ КУЛЬТУРЫ
КУЗНЕЦОВ В. В, ПОПОВ Г. И, КУРОЧКИН Ю. П
МПК / Метки
МПК: A61B 5/10
Метки: биологического, двигательным, действием, объекта
Опубликовано: 23.12.1980
Код ссылки
<a href="https://patents.su/3-711715-sistema-upravleniya-dvigatelnym-dejjstviem-biologicheskogo-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Система управления двигательным действием биологического объекта</a>
Устройство для управления обкаткой двигателя внутреннего сгорания с батарейной системой зажигания

Номер патента: 1346958
Опубликовано: 23.10.1987
Автор: Варшавский
МПК: G01M 15/00
Метки: батарейной, внутреннего, двигателя, зажигания, обкаткой, сгорания, системой
...-5дится во включенном состоянии, поэтому при пуске двигателя прерыватель 2с помощью ключевого элемента 3 подключается к катушке зажигания, обеспечивая нормальный запуск. Импульсные 40напряжения с прерывателя 2 поступаютна вход электронного ключа 4, который синхронно с прерывателем 2 включается и выключается. С выхода электронного ключа 4 импульсы поступаютна нормализатор 5 уровня, обеспечивающий выравнивание указанных импульсовпо амплитуде. После дифференцирующейцепи 6 сигналпоступает на вход вы- .прямителя 7, где преобразуется в однополярный сигнал, а затем на интегратор 8; который выделяет постоянную составляющую сигнала. При этомнапряжение на выходе интегратора 8пропорционально частоте вращения обкатываемого двигателя. На...
Устройство для регулирования впрыска топлива в двигатель внутреннего сгорания с внешним смесеобразованием и искровым зажиганием

Номер патента: 579934
Опубликовано: 05.11.1977
Автор: Герхард
МПК: F02D 3/00
Метки: внешним, внутреннего, впрыска, двигатель, зажиганием, искровым, сгорания, смесеобразованием, топлива
...по- .стоянньвА., 10Питание топливом осуществляется ст насоса 1 1, откачиваюшего топливо из бака 1 2, От магистрали 9 может ответвляться трубопровод 13, в который вмонтирован клапан 14 регулировки давления. )5Орган аозирования 8 снабжен трубопрово. дами 15, которые подводят топливо впрыскиваюшим форсункам (на чертеже не показаны),Участки впускного трубопровоаа 1 до и после возаухомерв 2 соединены бвйпасным 20 каналом 16, в котором установлен запорный орган 17. Кроме того, проходное сечение бвйпасного канала 16 определяется дроссельным отверстием 18, выполненным в шайбе. Запорный орган 17 подключен через орган 2 управления к датчику 19 наличия кислорода в выхлопных газах авигателя.Устройство управления (фиг. 1) выполнено в виде...
Устройство для моделирования объектов с распределенными параметрами

Номер патента: 1043660
Опубликовано: 23.09.1983
МПК: G06G 7/46
Метки: моделирования, объектов, параметрами, распределенными
...6, работающегов фазоимпульсном режиме, элемента ИЛИ-НЕ 7, КБ-триггера 8, элемента. 2 И-ИЛЙ 9, счетчика 10, а такке тактовые входы 11 и 12 и вход13 устройства,Генератор 4 используется дляформирования с периодом Т развертывающего напряжения Бф(С), формакоторого определяет характер моделируемой нелинейности д(ур) (фиг,3).В качестве блока 4 может быть использован последовательно соединенный генератор пилообразного напряжения, синхронизированный сигналом, подаваемым на .тактовый вход11 устройства и блок нелинейности,например диодный, функциональныйпреобразователь (не показаны).Перед началом работы устройствасчетчик 10 сбрасывается в нульпутем подачи наего вход 14 импульсасброса Ко.Работа устройства начинаетсяс подготовительного периода, в...
Способ регулирования мощности двигателя внутреннего сгорания с внешним смесеобразованием и устройство для его осуществления

Номер патента: 1677359
Опубликовано: 15.09.1991
Авторы: Арциховский-Кузнецов, Пал, Полякова, Спиридонов
МПК: F02D 28/00, F02D 35/00, F02D 41/02
Метки: внешним, внутреннего, двигателя, мощности, сгорания, смесеобразованием
...50сигналов частоты вращения коленчатого вала и момента на валу в соответствующий имугол открытия дроссельной заслонки.Сигнал с выхода преобразователя 9 через сумматор 12 поступает на привод дроссел ьной заслонки 13, которыйустанавливает ее в соответствующее положение, по окончании процесса изменениямомента на валу двигателя внутреннего сгорания 14 функциональный преобразователь 7 формирует цифровой сигнал, пропорциональный текущему значению момента М на валу в соответствии с выражениемМ=(А ЫИ + АИАт - Ь Р),где Ь Р - цифровой сигнал, пропорциональный разрежению во впускном трубопроводе, формируемый на выходе счетчика-таймера 5 путем преобразования аналогового сигнала с выхода датчика разрежения 1 в последовательность импульсов...
Способ работы двигателя внутреннего сгорания с жидкостной системой охлаждения

Номер патента: 1176099
Опубликовано: 30.08.1985
Авторы: Безюков, Забелина, Сомов
МПК: F02B 47/02
Метки: внутреннего, двигателя, жидкостной, охлаждения, работы, сгорания, системой
...очистки, топливоподкачивающий насос 12 с регулировочным клапаном 13 и второе 14 и третье 15 расходомерные устройства. Выход 16 системы охлаждения 7 подключен к магистрали 6 через расширительный бак 17 и холодильник 18, установлек ные в эмульсионном трубопроводе 19. Последний имеет ответвление 20 для выделения потока водотопливной эмульсии, подаваемой к форсункам 2 1 и 22 через фильтр 23 грубой очистки, Зо фильтр 24 тонкой очистки и топливные насосы 25 и 26 высокого давления. Холодильник 18 соединен с охлаждаю" щей водой через фильтрующий элемент 27 помпу 28 и Фильтр-холодиль 935 цик 29. Способ осуществляется следующимобразом. 40Из топливного бака 9 черезфильтр 11 предварительной очистки топливо подается топливоподкачивающим насосом...
Предыдущий патент: Линия эсептического консервирования пищевых продуктов
Следующий патент: Машина для удаления льда с аэродромных покрытий
Случайный патент: Рекуперативный теплообменник