Система контурного программного управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
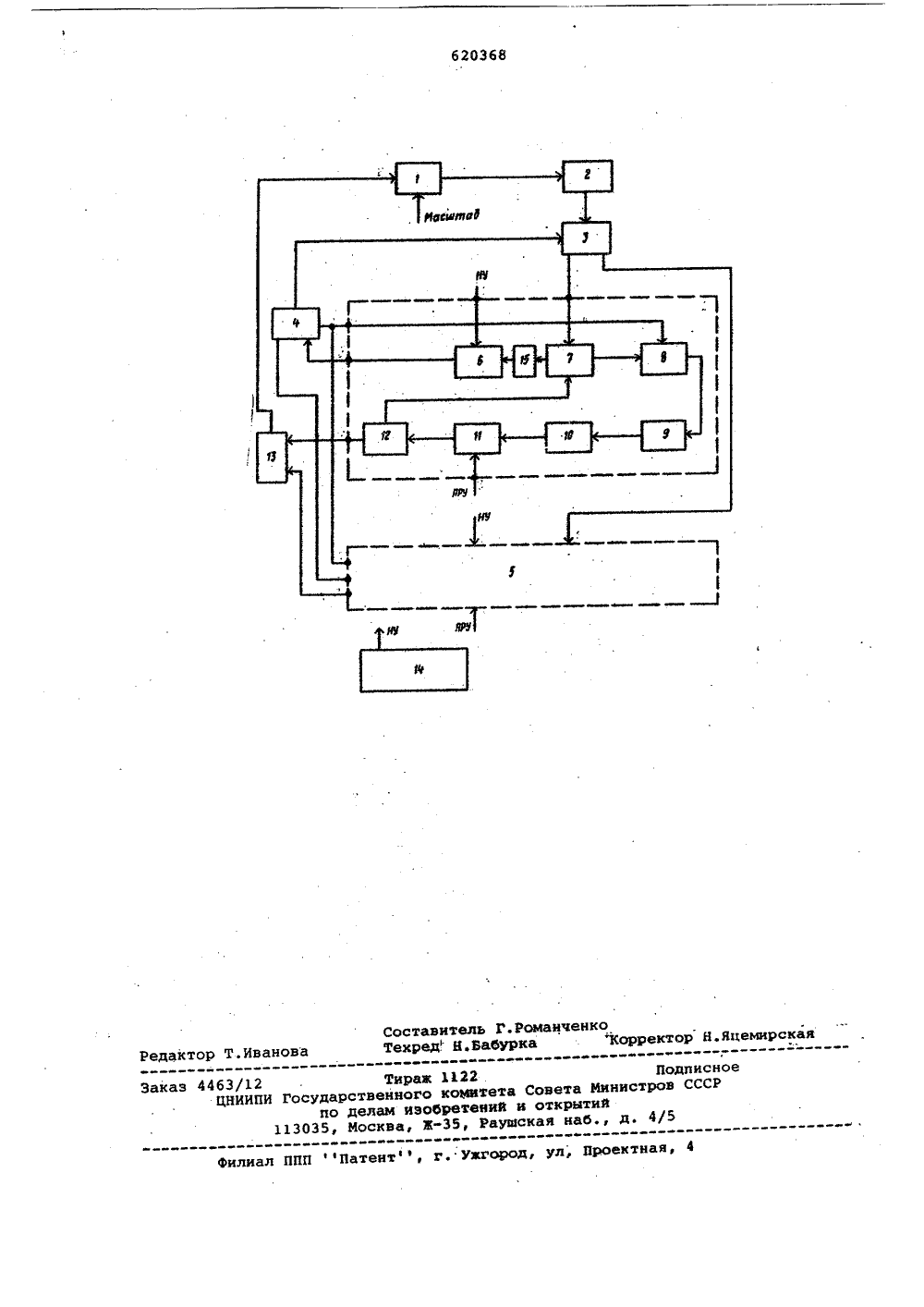
ОПИСАНИЕ ИЗОБРЕТЕНИЯ 4"ефэ Ееветсииа Сеции аист ичееюп Реевубиии(5) М, Кл. с присоединением заявки ЮВ 259/00 Государствеииый комитетСоаета Мииистров СССР,ио аслам изобретеиийи открытий(43) Опубликовано 250878. Бюллетень ЭВ 31 (63) УДЕ 62-50 (088,8) (45) Дата опубликования описания 120778(54) СИСТЕМА КОНТУРНОГО ПРОГРАММНОГО УПРАВЛЕНИЯмАниПулятОРОм Изобретение относится к работотехнике и может бытЬ использовано при создании .систем контурного програм" много управления манипулятором.Известная система контурного прог-. раммного управления манипулятором, содержащая программоноситель, считывающее устройство, усилители, фазовый дискриминатор, датчик обратной связи и исполнительный двигатель, имеет сложнЫй процесс интерполяции.1Наиболее близким по техническому решению к предлагаемому является система контурного нрограммного управ" ления манипулятором , содержащая блок управления и последовательно соединенные коммутатор, устройство записи программы, блок памяти, считывающее устройство, второй вход которого подключен к выходу элемента И, и по числу регулируемых координат последовательно соединенные цифроаналоговый преобразователь, привод, датчик положения, сумматор, инвертор и триггер, выходы датчиков положения подключены к соответствующим входам коммутатора, выходы считывающего устройства соединены со вторыми входами сумматоров, выходы .триггеров, подключены к соответствующим входам элемента И, а выход блока управления - ко вторым входам триггеров 2,К недостаткам этой системы следует отнести сложность реализации контурного управления, при этом требуется линейный интерполятор, что снижает надежность системы за счет обработки дополнительных сигналов, поступающих с линейного интерполятора,,а также невозможность программироватьлинейные участки траектории большими отрезками.Цель изобретения - упрощение иповышение надежности системы контурного программного управления манипулятором,Сущность изобретения заключаетсяв том, что система содержит по числу регулируемых координат последбвательно соединенные ключ и регистр,выход которого подключен к входу цифро- аналогового преобразователя, первый вход ключа соединен со вторым выходом сумматора, а второй - с выходом элемента И.На чертеже представлена структурная схема системы.Система содержит устройство 1 записи программы; блок 2 памяти; счиЗ 0 ,тывающее устройство 31 элемент И 4,устройство 5 управления приводом, триггер б; сумматор 7; ключ 81 ревистр 9 цифро-аналоговый преобразователь 10 привод 11; датчик положения 12; коммутатор 13; блок управления 14 и инвертор 15.Система работает следующим образом.В режиме обучения выдается управляющий сигнал на привод 11 и охват манипулятора помещается последовательно в опорные точки по траектории, перемещения. С помощью устройства 1 записи программы, коммутатора 13 и блока управления 14 показания датчиков положения 12 и масштаб, (отношение длины программируемого отрезка к еди" ничному отрезку) последовательно поступают в блок памяти 2.При обучении оператор разбивает траекторию перемещения схвата мани" пулятора на единичные отрезки и проводит обучение манипулятора по полу" ченным точкам. На прямолинейных участках траектории можно исключить промежуточные точки, но записать в программе количество отрезков, укладывающихся на участке перемещения.Учитывая то, что значения перемещений хранятся в регистрах 9 до отработки перемещений по координатам, при выборе пропорционального закона .управления приводом 11 получают постоянную скорость, пропорциональную длине единичного отрезка.При установке системы в режим обработки программы на один вход сумма" тора 7 поступает сигнал от датчика положения 12, на другой вход иэ блока памяти 2 через считывающее устройство 3 - положение опорной тОчки.Разность этихфсйгналОЗ поступает через ключ 8, регистр 9 и цифро-ана логовый преобразователь 10 на привод 11. Последний обрабатывает этот сигнал. Как только на выходе сумйатора 7 появляется нулевой сигнал, срабатывает триггер б, и через элемент И 4 подается команда на считывание значения программы следующего кадра. После этого триггер б устанавливаетсяв начальноефположение по сигналу сблока управления 14, и процесс повторяется.Применение изобретения позволитисключить интерпьлятор, что повышает 5 надежность системы за счет того, чтоустройство менее нагружено вычислениями, а также значительно упроститьопроцесс обучения манипулятора иуменьшить емкость памяти, так как 10 на прямолинейных отрезках требуетсяменьше опорных точек.Формула изобретенияСистема контурного программногоуправления манипулятором, содержащая 15 блок управления и последовательно со"единенные коммутатор, устройство за,писи программы, блок памяти, считывающее устройство, второй вход которбго подключен к выходу элемента И, я 1 и по числу регулируемых координат,последовательно соединенные цифроаналоговый преобразователь, привод,датчик положения, сумматор, иивертори триггер, выходы датчиков положенияподключены к соответствующим входамкоммутатора, выходы считывающего устройства соединены со вторыми входамн сумматоров, выходы триггеров под-фключены к соответствующим входамэлемента,И, а,выход блока управления - ко вторим входам триггеров,отличающаясятем, что, сцелью упрощения .и повышения надежности, система содержит по числу регулируемых координат последователь- ЗБ но соединенные ключ и регистр, выходкоторого подключен к входу цифро-аналогового преобразователя, первыйвход ключа соединен со вторым выхо"дом сумматора, а второй вход - с вы" 40 ходом элемента И.Источники информации, принятые вовнимание нри,экспертизе:. Иванова едак Подписноров СССР 4 илиал ППП Патентф, г. Уигород, ул, Проектная,акаэ 4463/12 Ти ЦИИИПИ Государственн по делам 113035, Москвж 1122о коМитета Совета Инниобретений и открытийЖ-Э 5, Раушская наб д
СмотретьЗаявка
2455592, 24.02.1977
ПРЕДПРИЯТИЕ ПЯ Р-6930
КНАУЭР ИГОРЬ БОРИСОВИЧ, АГАПОВ АНАТОЛИЙ НИКИФОРОВИЧ, КОПЫТИН АЛЕКСАНДР ПАВЛОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: контурного, манипулятором, программного
Опубликовано: 25.08.1978
Код ссылки
<a href="https://patents.su/3-620368-sistema-konturnogo-programmnogo-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система контурного программного управления манипулятором</a>
Цикловая система программного управления манипулятором
Номер патента: 723512
Опубликовано: 25.03.1980
Авторы: Дорошев, Литовченко
МПК: G05B 19/00
Метки: манипулятором, программного, цикловая
...блок 9 блок 10 датчиков положения, блок 11 приводов манипулятора.5Устройство работает следующим образом.Сигналы генератора 1 импульсов подаются на распределитель 2 импульсов, подключенный , к программному блоку З,выполненному и ви. де штеккерной панели, на которой. с помощью 10 коммутационных элементов набрана программа последовательности выполнения команд, Сигналы, считанные со штеккерной панели 3, посту.пают в блок 4 триггеров,с выходов которого через блок 5 элементов И и формирователь 6 15 исполнительных сигналов поступают на блок 11 приводов манипулятора. Одновременно с этимсигналы с выходов формирователя 6 поступают в блок 7 сумматоров, на другие входы которого поступают сигналы с дополвтельного 20 ряда коммутационных...
Блок постоянной памяти для информационно-поисковой машины с последовательным вводом символов

Номер патента: 610176
Опубликовано: 05.06.1978
Автор: Петров
МПК: G11C 17/00
Метки: блок, вводом, информационно-поисковой, памяти, последовательным, постоянной, символов
...постоянной памяти при посленом вводе символов, допускающего И С целью сокрашения числа галфавитных шин, каждая из нихвует т значениям символов, родного иэ сто символов производится прварительным возбуждением одной из тправляюших шин,На чертеже показана функци альнвясхема блока постоянной памяти,Он содержит алфавитные гориэонтальншины 1, 11 т фрых соответствует двум симу - из первой группы,рой; две управляющие горизонта2 , 2 2, на квжцую и двуволов. Он содержит также вер610176 постоянной памяти на различные поисковыеобразы,Блок постоянной памяти для информационно-поисковой машины с последователь.ным вводом символов, содержащий горизонтальные алфавитные и управляющие шины,вертикальные шины выбора символов и выбора управляющих...
Устройство для обнаружения ошибок в блоках памяти программ

Номер патента: 1709395
Опубликовано: 30.01.1992
Авторы: Качанко, Сигалов, Фараджев
МПК: G11C 29/00
Метки: блоках, обнаружения, ошибок, памяти, программ
...из "0" В "1" триггера 111 одна-ВИЛрэтор 14 формирует падокитедьный импу.",ьс, который прибавляет:"116 и через элемент И,11 И 19 поступает нэ Вход ээписи блока 2 пэмЯти. В блоке 2 памяти по адресу считывания записывается 5 10 20 25 30 5 40 45 единичное значение с триггера 10. Если пралсходит обращение к ячейке памяти, к которой уже обращались, то содержимое соответствующего адреса блока 2 памяти равно единице, Следовательно, на выходе сумматора 15 присутствует нулевой потенциал и содержимое данного адреса повторно не накапливается в сумматоре 4, Кроме того, в счетчике 16 не учитыва 1 атся многократные обращения к одним и тем же адресам, счетчик 16 считает только первое абрэщен 1 ле по каждому иэ адресов, Пасде того, как было обращение...
Система программного управления манипулятором
Номер патента: 742875
Опубликовано: 25.06.1980
Авторы: Андреенко, Ворошилов, Петров
МПК: G05B 19/00
Метки: манипулятором, программного
...с программной ленты блока записи програмвь 2 блоком считывания 3 и вводитсяв блок оперативной памяти 4. Из блока оперативной памяти 4 информацияпоступает в схемы управления приоритетным и неприоритетным движениями,В схеме управления приоритетнымдвижением информация поступает в блоксравнения кодов 16, преобразуется всигнал упраьления в преобразователь17 и усиливается в усилителе мощности 18, Сигнал управления поступаетна третий двигатель 19, который привОдит в движение механизм 15 с приемником излучения 12,Движение механизма 15 вызываетперераспределение интенсивности излучения в качестве которого могутбыть использованы свет,-излучение,луч лазера и им подобные, источники11, падающие на приемник 12, Сигналы с приемника 12 поступают во...
Устройство для защиты памяти

Номер патента: 942162
Опубликовано: 07.07.1982
МПК: G11C 29/00
...(цепи уста"новки в исходное узлов устройствана фиг, 1 не показаны как несущественные) регистры 2, 3 и счетчикне содержат никакой информации,блок 9 находится в состоянии ожидания сигнала с выхода элемента ИЛИ 16,Триггер 10 устанавливается по входу20 в положение, при котором открытцэлементы И 122 и закрыты элементыИ 121. На вход 19подается содержимое счетчика комайд защищаемого вычислительного устройства, на вход19,1 - сигналы обращения к памяти программ, С выхода элементов И 11 вустройство защиты поступают предва-рительно выбранные адреса команд.Адрес начальной команды черезгруппу элементов И 12 г. записывается 62 6в счетчик 1, При ненулевой информации на входах элемента ИЛИ 17 наего выходе формируется сигнал, который устанавливает...
Предыдущий патент: Предельный паечный ключ
Следующий патент: Межпильная прокладка пильной рамки
Случайный патент: Механизм к прессу для регулирования параметров