Способ управления траекторией движения судна
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 724389
Автор: Завирухо
Текст
ОПИСАНИЕ ИЗОБР ЕТЕ Н И Я(54) СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНА1раййдщж. = - "ф: .1 2Изобретение относится к области тех- особенно значителен в том случае, когда- никиуправлеция движущимся объектом, на- взаимодействующие при траверзной грузопример судном, управляемым по величине передаче суда совершают совместный мапоперечного смещения от заданной траек- невр, например; разворот, В этом случае торин, и может быть использовано для уп. В они могут либо резко сблизиться, либо рез." Райпаизтя дВИГнййтййи ЩГГГВЗУйбщйЯ ГРУЗю КОраЗОйтИСЬ," ЧтО МОжЕт Прнвсетн СООтзвт.судном по.поперечному смещению относи- ственно-лио к столкновению судов, либо тельно траектории разгружаемого "судна к обрыву канатной дороги и потери передапри траверзной грузопередаче. ваемого по ней груза.щ-"="=-+ - Известен способ управления траекторией ш Целью изобретения является повышениедвижения судна, прйнимающего груз йри точности удержания" суднана заданном траверзйой грузопередаче, основанный на расстоянии относительно траектории, задаперекладке руля направления судна по "ве-наемой разгружаемым судном.личине поперечного смещения судна отза-Цель достигается тем, что измеряют угданной траектории до центра управле ловые положения рулей направления обоих м; - :-:-,.- ."-": "ния (Ц. судов, алгебраически суммируют их и фор-. - :-. - , -".Однако, в существующем способе управ- мируют управляющий сигнал, пропорциолеиия судном, прмнииающим груз, неучи: нальный этой сумме, в соответствии с кото.тывается взаймйоеположеййе"рулей при. рым производят дополнительную переклад.нимающего груз судна и судна снабжения 20 ку руля направления принимающего груз (разгружаемого судна), что особенно важ- судна.но при управлении инерционными объекта- Сущность предлагаемого способа заклю"-ждьй-:=.-. "мйякакими "ймапример,"являются"суда" йяер"- " чается-в"следующей;ционйость которых в зависимости от ско- " В случае совместного плавания двух сурости их хода,и типа может достигать 30 25 дов при траверзной прузопередаче разгруи более секунд, так как приводит к сниже- жаемое судно является задатчиком траектонию устойчивости и точности удержания рии движения для принимающего груз судпринимающего груз судна на заданном-по на и любое изменение его движения по кур. ж =-=. - : - :,.;-",; - ." перечном" смещении от" траекторий движе- су влечет за собой изменение траектории дя г у ае о а, Этот недостаток З 0 движения принимающего груз судна.ада.щФ 17 г ""- -; . - "ж":ж., з Ф; и=,; -.а еио ;ез 11 Еиаждкжои заСи 7 иззадДииззз 9 азазизадиодажажазажкиаиззаазааааи 19 ЩВ 97 жидажаадеадзааиджажи аа; 724389 Формула изобретения Способ управления траекторией движения судна, принимающего груз при траверзой грузопередаче, основанный на переклад 9 з Составитель Г. Корнева Редактор Т. Горячева Техред В, Серикова Корректор С. ФайнЛаказз 1979179 Изд199 Тираж 497 . Подииеиое НПО Поиск Государствеииого комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5,3Впереди по курсу судна выбираютцентр управления, определяют путем пересчета измеренных кинетических параметров движения величину поперечного омещения от заданной траектории до центра управления и в зависимости от ее величины перекладывают руль направления.Затем ,измеряют посредством датчика угла угловые положения рулей направления обоих судов, алгебраичесии суммируют эти величины и формируют сигнал, пропорциональный ей, в соответствии с которым перекладывают дополнительно руль направления принимающего груз судна. ке руля направления судна по величине поперечного смещения судна от заданной траектории до центра управления, о т л и- и а ю щ и й с я тем, что, с целью повыше ния точности удержания судна на заданномрасстоянии относительно траектории, задаваемой разгружаемым судном, измеряют угловые положения рулей направления обоих судов, алгебраически суммируют их и 10 формируют управляющий сигнал, пропорциональный этой сумме, в соответствии скоторым производят дополнительную перекладку руля направленная принимающего груз судна.15Источник ин 1 формации, принятый вовни 1 мание при экапертизе:1. Авторское сви 1 детельство СССР509494, кл, В 63 Н 25/00, 1976 (прото тип) .
СмотретьЗаявка
2609192, 24.04.1978
ПРЕДПРИЯТИЕ ПЯ А-1097
ЗАВИРУХО ВИТАЛИЙ ДМИТРИЕВИЧ
МПК / Метки
МПК: B63H 25/04
Метки: движения, судна, траекторией
Опубликовано: 30.03.1980
Код ссылки
<a href="https://patents.su/2-724389-sposob-upravleniya-traektoriejj-dvizheniya-sudna.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления траекторией движения судна</a>
Кран для подачи груза с передающего судна на принимающее судно в условиях волнения моря

Номер патента: 559856
Опубликовано: 30.05.1977
Автор: Горбешко
МПК: B63B 27/10
Метки: волнения, груза, кран, моря, передающего, подачи, принимающее, судна, судно, условиях
...связь судна 1 и дополнительной стрелы 13, так как золотник 21 находится в положении, при котором жидкость в полостях зо гидроцплпндра 19 заперта, В результате груз16 начинает отслеживать, вертикальные перемещения судна 15, При овносительном подьеме судна 15 точка закрепления следящего троса поднимается, и следящий трос подтягивает ось блока 12 к блоку 14, грузовой трос при этом выбирается и поднимает груз 16 на высоту подъема судна 15, чем обеспечивается постоянство расстояния между грузом и палубой принимающего судна. То же происходит,при опускании палубы судна 15, так как следящий трос натянут усилием, создаваемым весом груза 16, Онуокание груза 16 на палубу судна 15 осуществляется грузовым приводом 4, который, вращая барабан 3,...
Способ управления траекторией движения судна

Номер патента: 1062129
Опубликовано: 23.12.1983
Авторы: Завирухо, Мирошниченко
МПК: B63H 25/00
Метки: движения, судна, траекторией
...следа раэгружаемого судна, согласно которому формируют сигнал управления .по которому производят перекладку руля 55 направления принимающего груз судна.На фиг.1 изображена схема совместного плавания двух судов при траВерз ной передаче груза, на фиг.2 - схема управления после выхода одного суднаО на траверз другого во время грузоперецачи,ф на фиг.З - приборы управления "удном и измерительные приборы.В случае совместного плавания двух судов при траверзной грузопередаче. фиг.1) разгружаемое судно является задатчиком траектории движения для принимающего груз судна и любое изменение его движения по курсувлечет за собой изменение траектории движе- ния принимающего груз судна. Взаимодействие судов, раэгружаемого и принимающего...
Способ исправления траектории движения прокладываемой трубы и устройство для его осуществления
Номер патента: 1694793
Опубликовано: 30.11.1991
Авторы: Белоногов, Громов, Янковский
МПК: E02F 5/18
Метки: движения, исправления, прокладываемой, траектории, трубы
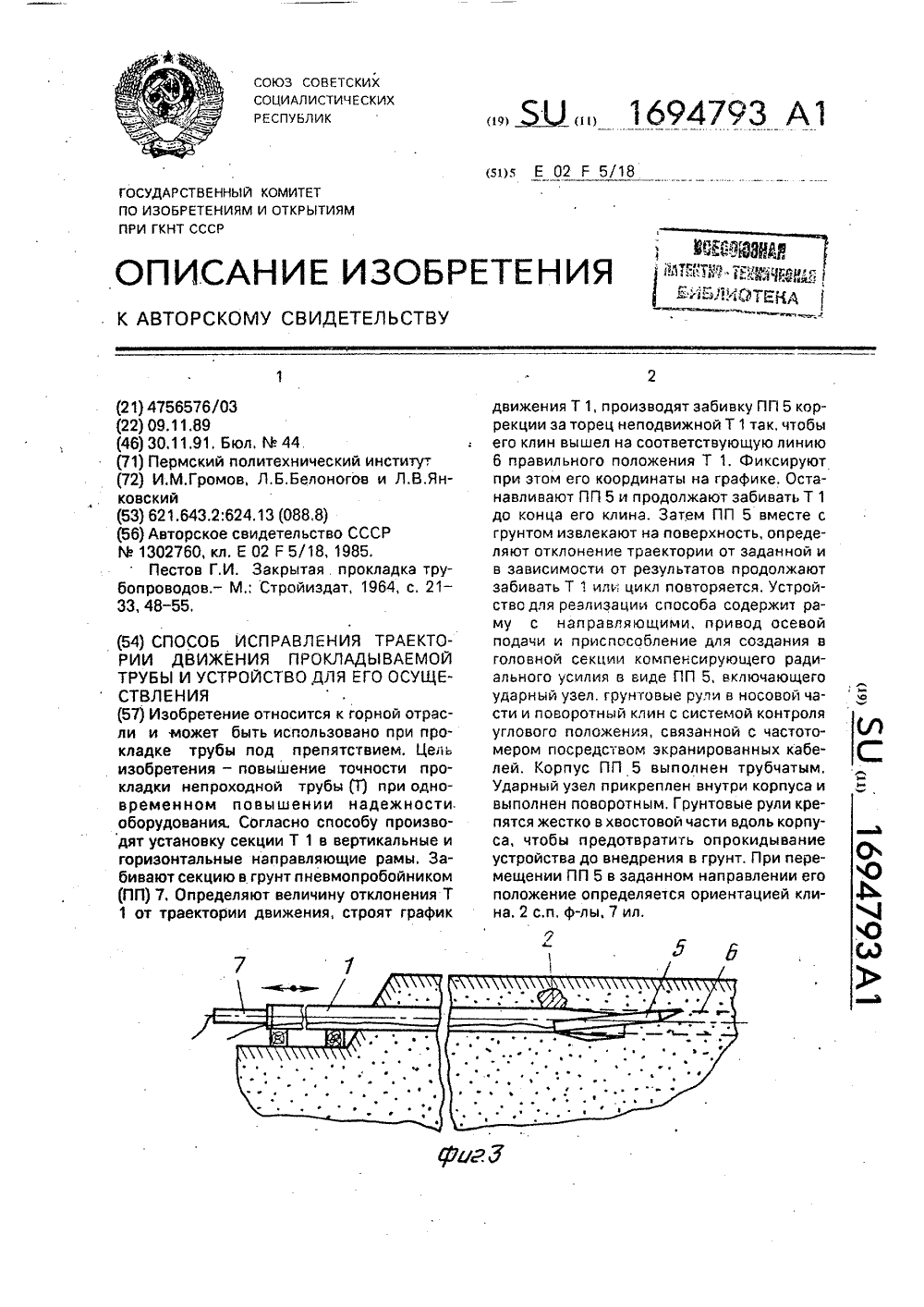
...ее отклонение, Убедившись в исправлении траектории, продолжают дальнейшую забивку трубы 1 пневмопробойником 7.Устройство для исправления траектории движения прокладываемой трубы включает раму с направляющими для размещения секций рубы с п,риводом осевой подачи и приспособление для создания35 ном 10 с помощью винтов 13, Головки винтов 13 выполнены заподлицо с корпусом. Реверс пневмопробойника 5 коррекции осуществляется за счет заднего хода ударного узла 9.40П р и м е р, При забивании трубы диаметром 0,325 м на длину 95 м под железнодорожным полотном станции Пермь - Сортировочная было зафиксировано на расстоянии 40 м отклонение от прямолинейности, Труба опускалась под углом, равным 0 20 . Отклонение составляло 0,21 м, Было принято...
Способ управления траекторией движения судна
Номер патента: 908656
Опубликовано: 28.02.1982
Автор: Завирухо
МПК: B63H 25/00
Метки: движения, судна, траекторией
...относительно которой производится измерение текущего значения поперечного смещения от заданной908656 формула изобретения Составитель С. Марф пп Техред А. Бойкас Тираж 463 ВНИИПИ Государственного ком по делам изобретений и о 113035, Москва, Ж - 35, Раушска Филиал ППП Патент, г. Ужгород, инаКорректор Подписноетета СССР ткрытийнаб., д. 4/5 ул. Проектная Пономарев Редактор Е, ПаЗаказ 717/20 траектории, с 1 - рассогласование курсовых углов У, и У соответственно разгружаемого и принимающего судов, измеряемое датчиками курса.Величину смещения Ур сообщают рулевому принимающего груз судна 2 в виде отклонения стрелки индикатора и производят перекладку руля 4 направления в зависимости от величины поперечного смещения от заданной траектории до...
Способ управления траекторией движения судна

Номер патента: 867786
Опубликовано: 30.09.1981
Автор: Завирухо
МПК: B63H 25/24
Метки: движения, судна, траекторией
...величину поперечного сечения Ур) от заданной траекториидо центра (р) управления в соответствиис зависимостьюЪр =амит 6 ч;где 9 - рассогласование курсовых угловЦ исоответственно судка и заданнойтраектории, измеряемое датчиками.Эта зависимость верна при достаточно,малых углах 9 . Затем измеряют посредством датчика угловую скорость (Ф) судна (относительно его центра тяжести О.Т.)и анализируют по знаку посредством схемы совпадения электрические сигналы овеличине поперечного смещения центра3 8677 управления и угловой скорости судна, а перекладку руля направления судна на угол О в зависимости от поперечного смещения его центра управления производят только тогда, когда знаки указанных па 5 раметров совпадают,Если знак электрического сигнала об...
Предыдущий патент: Движительно-рулевой комплекс судна
Следующий патент: Способ упаковки резиновой заготовки
Случайный патент: 234047