Способ исправления траектории движения прокладываемой трубы и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
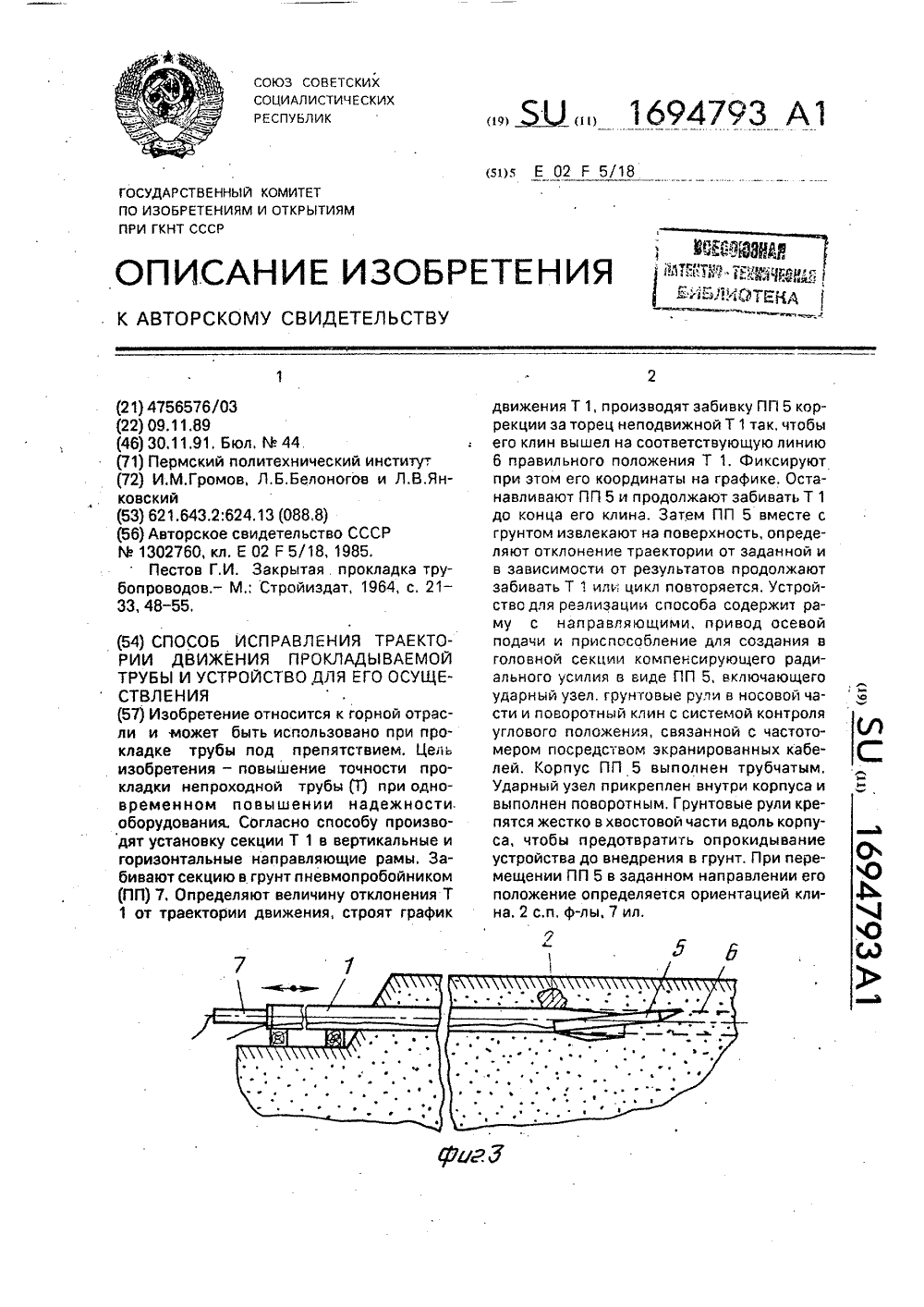
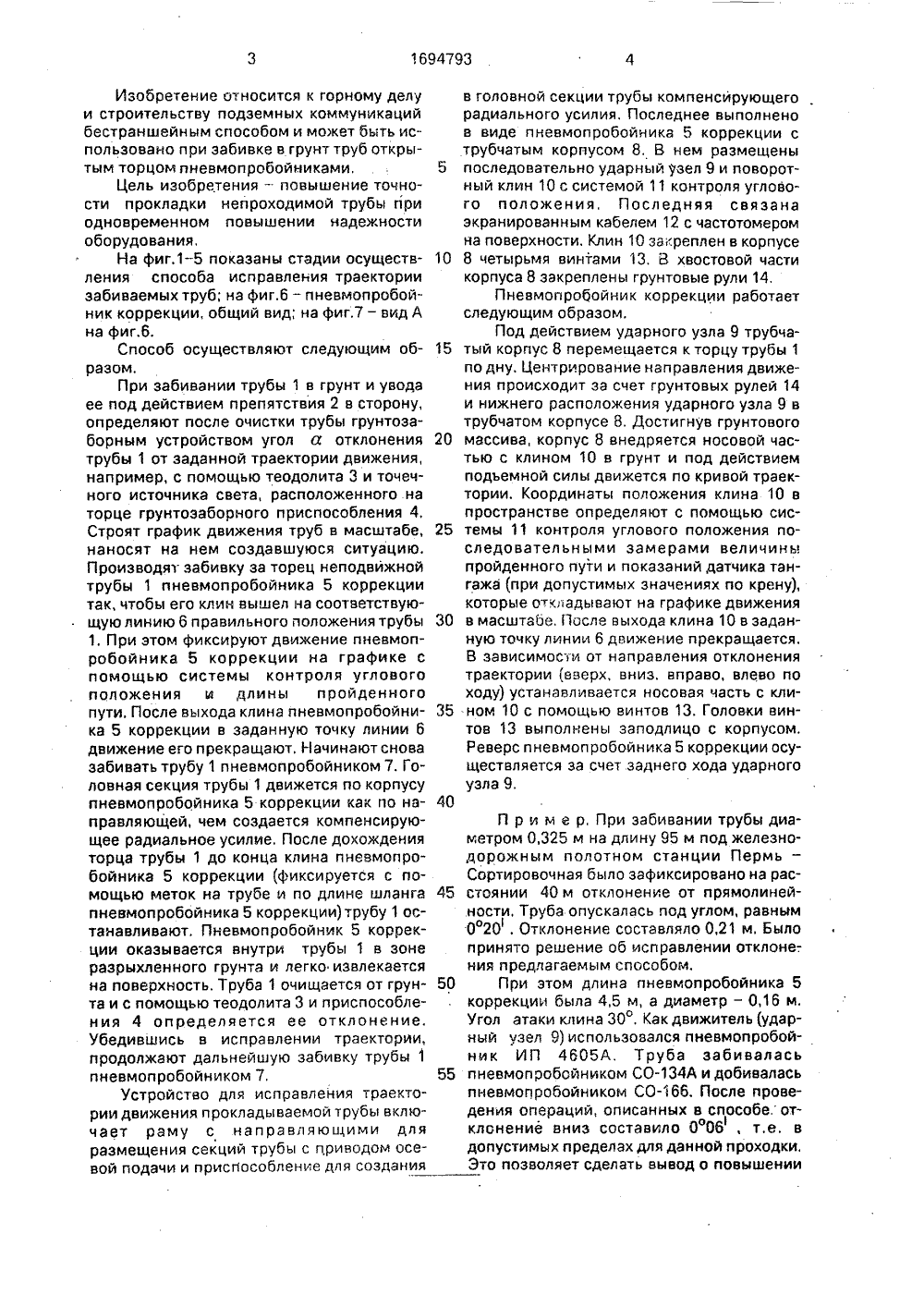
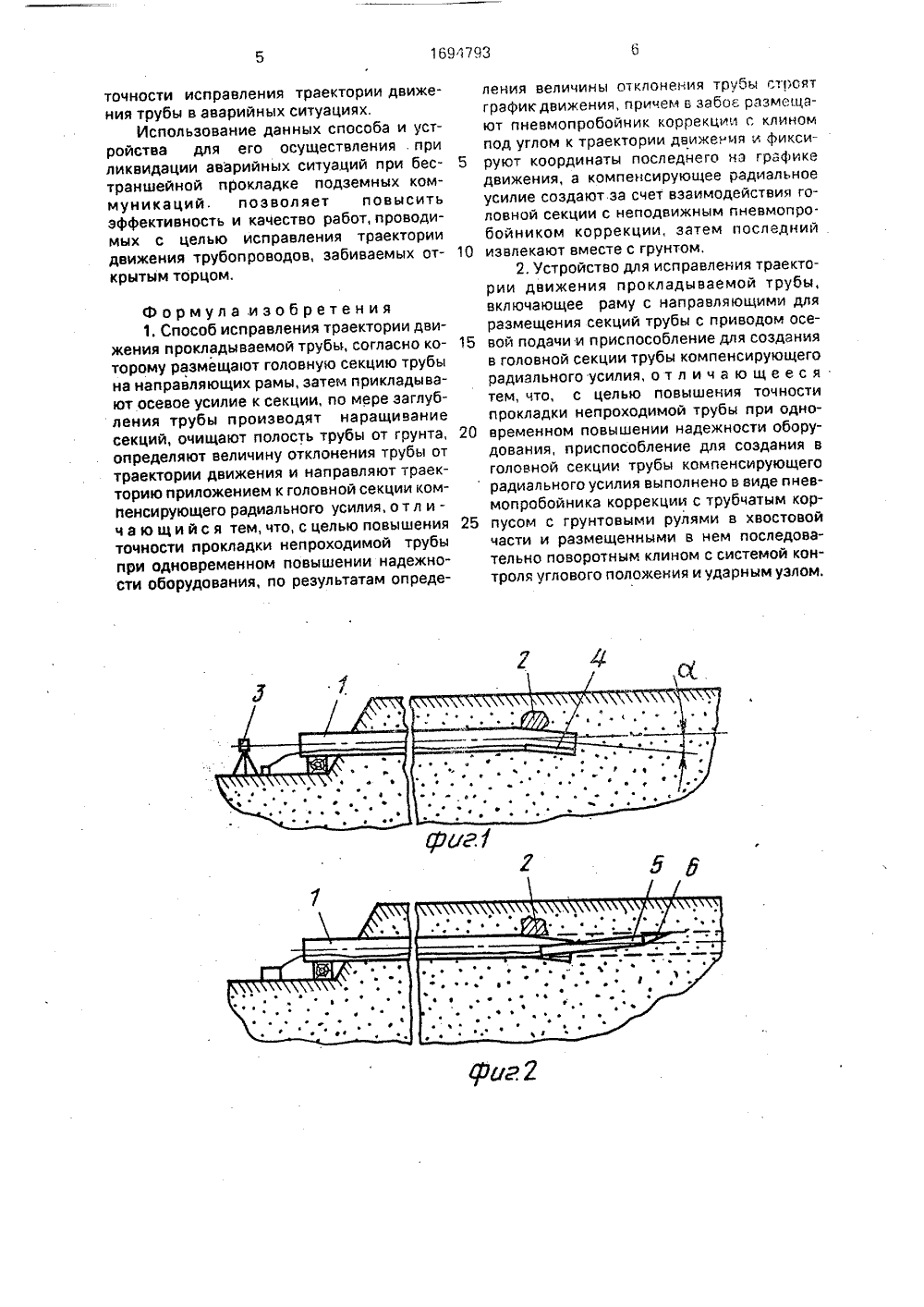
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 9) (1 ) 1)5 Е 02 Р 5/1 ИСАНИЕ ИЗОБРЕТЕНИЯ Тк ф., ) фффлр ;ь. .з.)1 гщ=) ИДЕТЕЛ ЬСТ К АВТОРСКО13 (088,8)детельство СССР 2 Е 5/18, 1985.Закрытая. прокладка труСтройиздат, 1964, с. 21 -ЕНИЯ ТРАЕКТООКЛАДЫ ВАЕМОЙ ДЛЯ ЕГО ОСУЩЕтся к горнои отрасльзовано при проепятствием, Цепь ие точности прорубы Щ при одноии надежности. способу произвов вертикальные и яющие рамы, Заевмопробойником чину отклонения Т ия, строят график ГОСУДАРСТВ Е ННЫ И КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(54) СПОСОБ ИСПРАВЛ РИИ ДВИЖЕНИЯ ПР ТРУБЫ И УСТРОЙСТВО СТВЛЕНИЯ(57) Изобретение относи ли и может быть испо кладке трубы под пр изобретения - повышен кладки непроходной т временном повышен оборудования. Согласно дят установку секции Т 1 горизонтальные направл бивают секцию в грунт пн (ПП) 7. Определяют вели 1 от траектории движен движения Т 1, производят забивку ПП 5 коррекции за торец неподвижной Т 1 так, чтобы его клин вышел на соответствующую линию 6 правильного положения Т 1, Фиксируют при этом его координаты на графике. Останавливают ПП 5 и продолжают забивать Т 1 до конца его клина. Затем ПП 5 вместе с грунтом извлекают на поверхность, определяют отклонение траектории от заданной и в зависимости от результатов продолжают забивать Т 1 или цикл повторяется. Устройство для реализации способа содержит раму с направляющими, привод осевой подачи и приспособление для создания в головной секции компенсирующего радиального усилия в виде ПП 5, включающего ударный узел. грунтовые рули в носовой части и поворотный клин с системой контроля углового положения, связанной с частотомером посредством экранированных кабе- С лей, Корпус ПП 5 выполнен трубчатым, Ударный узел прикреплен внутри корпуса и выполнен поворотным, Грунтовые рули крепятся жестко в хвостовой части вдоль корпуса, чтобы предотвратить опрокидывание устройства до внедрения в грунт. При перемещении ПП 5 в заданном направлении его О положение определяется ориентацией кли- Ь на. 2 с.п, ф-лы,7 ил. 4Изобретение относится к горному делу и строительству подземных коммуникаций бестраншейным способом и может быть использовано при забивке в грунт труб открытым торцом пневмопробойниками,Цель изобретения - повышение точности прокладки непроходимой трубы при одновременном повышении надежности оборудования.На фиг,1 - 5 показаны стадии осуществления способа исправления траектории забиваемых труб; на фиг,6 - пневмопробойник коррекции, общий вид; на фиг,7 - вид А на фиг.б.Способ осуществляют следующим образом.При забивании трубы 1 в грунт и увода ее под действием препятствия 2 в сторону, определяют после очистки трубы грунтозаборным устройством угол а отклонения трубы 1 от заданной траектории движения, например, с помощью теодолита 3 и точечного источника света, расположенного на торце грунтозаборного приспособления 4, Строят график движения труб в масштабе, наносят на нем создавшуюся ситуацию, Производят забивку за торец неподвижной трубы 1 пневмопробойника 5 коррекции так, чтобы его клин вышел на соответствующую линию 6 правильного положения трубы 1. При этом фиксируют движение пневмопробойника 5 коррекции на графике с помощью системы контроля углового положения и длины пройденного пути. После выхода клина пневмопробойника 5 коррекции в заданную точку линии 6 движение его прекращают, Начинают снова забивать трубу 1 пневмопробойником 7, Головная секция трубы 1 движется по корпусу пневмопробойника 5 коррекции как по направляющей, чем создается компенсирующее радиальное усилие, После дохождения торца трубы 1 до конца клина пневмопробойника 5 коррекции (фиксируется с помощью меток на трубе и по длине шланга пневмопробойника 5 коррекции) трубу 1 останавливают. Пневмопробойник 5 коррекции оказывается внутри трубы 1 в зоне разрыхленного грунта и легко извлекается на поверхность, Труба 1 очищается от грунта и с помощью теодолита 3 и приспособления 4 определяется ее отклонение, Убедившись в исправлении траектории, продолжают дальнейшую забивку трубы 1 пневмопробойником 7.Устройство для исправления траектории движения прокладываемой трубы включает раму с направляющими для размещения секций рубы с п,риводом осевой подачи и приспособление для создания35 ном 10 с помощью винтов 13, Головки винтов 13 выполнены заподлицо с корпусом. Реверс пневмопробойника 5 коррекции осуществляется за счет заднего хода ударного узла 9.40П р и м е р, При забивании трубы диаметром 0,325 м на длину 95 м под железнодорожным полотном станции Пермь - Сортировочная было зафиксировано на расстоянии 40 м отклонение от прямолинейности, Труба опускалась под углом, равным 0 20 . Отклонение составляло 0,21 м, Было принято решение об исправлении отклоне-.ния предлагаемым способом,При этом длина пневмопробойника 5коррекции была 4,5 м, а диаметр - 0,16 м.Угол атаки клина 30, Какдвижитель(ударный узел 9) использовался пневмопробойник ИП 4605 А. Труба забивалась пневмопробойником СОА и добивалась пневмоп,робойником С 0-166, После проведения операций, описанных в способе,отклонение вниз составило О 06, т,е, в допустимых пределах для данной проходки.Это позволяет сделать вывод о повышении 5 10 15 20 25 30 в головной секции трубы компенсирующего радиального усилия. Последнее выполнено в виде пневмопробойника 5 коррекции с трубчатым корпусом 8, В нем размещены последовательно ударный узел 9 и поворотный клин 10 с системой 11 контроля углового положения, Последняя связана экранированным кабелем 12 с частотомером на поверхности, Клин 10 закреплен в корпусе 8 четырьмя винтами 13. В хвостовой части корпуса 8 закреплены грунтовые рули 14,Пневмопробойник коррекции работает следующим образом.Под действием ударного узла 9 трубчатый корпус 8 перемещается к торцу трубы 1 по дну. Центрирование направления движения происходит за счет грунтовых рулей 14 и нижнего расположения ударного узла 9 в трубчатом корпусе 8. Достигнув грунтового массива, корпус 8 внедряется носовой частью с клином 10 в грунт и под действием подъемной силы движется по кривой траектории. Координаты положения клина 10 в пространстве определяют с помощью системы 11 контроля углового положения последовательными замерами величины пройденного пути и показаний датчика тангажа (при допустимых значениях по крену), которые откладывают на графике движения в масштабе, После выхода клина 10 в заданную точку линии 6 движение прекращается. В зависимости от направления отклонения траектории (вверх, вниз, вправо, влево по ходу) устанавливается носовая часть с кли 1691793точности исправления траектории движения трубы в аварийных ситуациях.Использование данных способа и устройства для его осуществления . при ликвидации аварийных ситуаций при бес траншейной прокладке подземных коммуникаций. позволяет повысить эффективность и качество работ, проводимцх с целью исправления траектории движения трубопроводов, забиваемых от крытым торцом,Ф о р м у л а .и з о б р е т е н и я1. Способ исправления траектории движения прокладываемой трубы, согласно ко торому размещают головную секцию трубы на направляющих рамы, затем прикладывают осевое усилие к секции, по мере заглубления трубы производят наращивание секций, очищают полость трубы от гоунта, 20 определяют величину отклонения трубы от траектории движения и направляют траекторию приложением к головной секции компенсирующего радиального усилия, о т л ич а ю щ и й с я тем, что, с целью повышения 25 точности прокладки непроходимой трубы при одновременном повышении надежности оборудования, по результатам определения величины отклонения трубы строят графикдвижения, причем в забое размещают пневмопробойник коррекцил с клином под углом к траектории движения и фиксируют координаты последнего на графике движения, а компенсирующее радиальное усилие создают.за счет взаимодействия головной секции с неподвижным пневмопробойником коррекции, затем последний извлекают вместе с грунтом,2. Устройство для исправления траектории движения прокладываемой трубы, включающее раму с направляющими для размещения секций трубы с приводом осевой подачи и приспособление для создания в головной секции трубы компенсирующего радиального усилия, о т л и ч а ю щ е е с я тем, что, с целью повышения точности прокладки непроходимой трубы при одновременном повышении надежности оборудования, приспособление для создания в головной секции трубы компенсирующего радиального усилия выполнено в аиде пневмопробойника коррекции с трубчатым корпусом с грунтовыми рулями в хвостовой части и размещенными в нем последовательно поворотным клином с системой контроля углового положения и ударнцм узлом.
СмотретьЗаявка
4756576, 09.11.1989
ПЕРМСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ГРОМОВ ИГОРЬ МИХАЙЛОВИЧ, БЕЛОНОГОВ ЛЕОНИД БОРИСОВИЧ, ЯНКОВСКИЙ ЛЕОНИД ВАЦЛАВОВИЧ
МПК / Метки
МПК: E02F 5/18
Метки: движения, исправления, прокладываемой, траектории, трубы
Опубликовано: 30.11.1991
Код ссылки
<a href="https://patents.su/4-1694793-sposob-ispravleniya-traektorii-dvizheniya-prokladyvaemojj-truby-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ исправления траектории движения прокладываемой трубы и устройство для его осуществления</a>
Устройство для стабилизации прямолинейного движения и изменения положения на заданной траектории осей транспортного средства (его варианты)

Номер патента: 1351514
Опубликовано: 07.11.1987
Автор: Роберто
МПК: B62D 5/06
Метки: варианты, движения, его, заданной, изменения, осей, положения, прямолинейного, средства, стабилизации, траектории, транспортного
...усилия, создаваемые нагружающим устройством 4, будут больше внешних усилий, действующих на управляемые колеса 2 и пружина 12 2удерживает колеса 2 в положении прямолинейного движения.При работе гидроцилиндра 1 управляемые колеса 2 поворачиваются, перемещая шток 6 в соответствующую сторону, что приводит к сжатию пружины12 посредством движения одного изстаканов 9 и 10 внутрь корпуса 5 принеподвижном другом стакане. Это приводит к созданию стабилизирующегоусилия, обеспечивающего возврат колес2 в положение прямолинейного движения при снятии воздействия на органрулевого управления.Устройство для стабилизации прямолинейного движения и измененияположения на заданной траекторииосей транспортного средства по второму варианту выполнения...
Способ коррекции движения тракторного агрегата по крену

Номер патента: 259512
Опубликовано: 01.01.1970
Авторы: Государственный, Дтк, Калоев, Макеев
МПК: A01B 69/08
Метки: агрегата, движения, коррекции, крену, тракторного
...системы автоматического вождения тракторов и на полях со сложным рельефом местности. крену.Практика показыввдаль гона с большбоковых сил, действформации шин и грним и агрегатируеморону уклона, На паоперациях эго явленширины захвата ипропашных работах ает, чт им укл ующихунта тр о при движении оном под влияниемна трактор, и деактор (а вместе с ие) сползает в стонекоторых других зано с изменением ием огрехов, а на дрезанием карне е оруд хоге и ие свя появлен мет изобретен Способ,к грегата п- с п Изобретение относится к способам направления тракторного агрегата вдоль желаемой колеи.Известный способ осуществляется использованием копирующего щупа системы автоматического направления движения, но он не обеспечивает устранение сползания...
Устройство для удержания в сдвинутом положении секций телескопической вышки

Номер патента: 219496
Опубликовано: 01.01.1968
Авторы: Научно, Рубинштейн, Хмызников
МПК: E21B 15/00, E21B 7/02
Метки: вышки, положении, сдвинутом, секций, телескопической, удержания
...закрепленногоной секции вышки.2, Устройство по п. 1,что криволинейная поверобразована дугой окружиоси поворота вышки. 10 показано устройышки в транспортНа чертеже схематичнство в момент переводаное положение.Устройство содержит крленный на раме 2, тележ отличающееся тем, хи ость кронштейна ости с центром на нштейн 1, установ уЗ и ролик 4, за Известны устроиства для удержания в сдвинутом положении секций телескопической ьышки, выполненные в виде болтов и планок. Основным недостатком таких устройств является то, что выдвижные секции вышки стопорятся вручнуюПредложенное устройство отличается от известных тем, что оно выполнено в виде установленного на несущей раме кронштейна с криволинейной поверхностью и взаимодействующего с ней при...
Устройство для определения положения секции гидрофицированной крепи
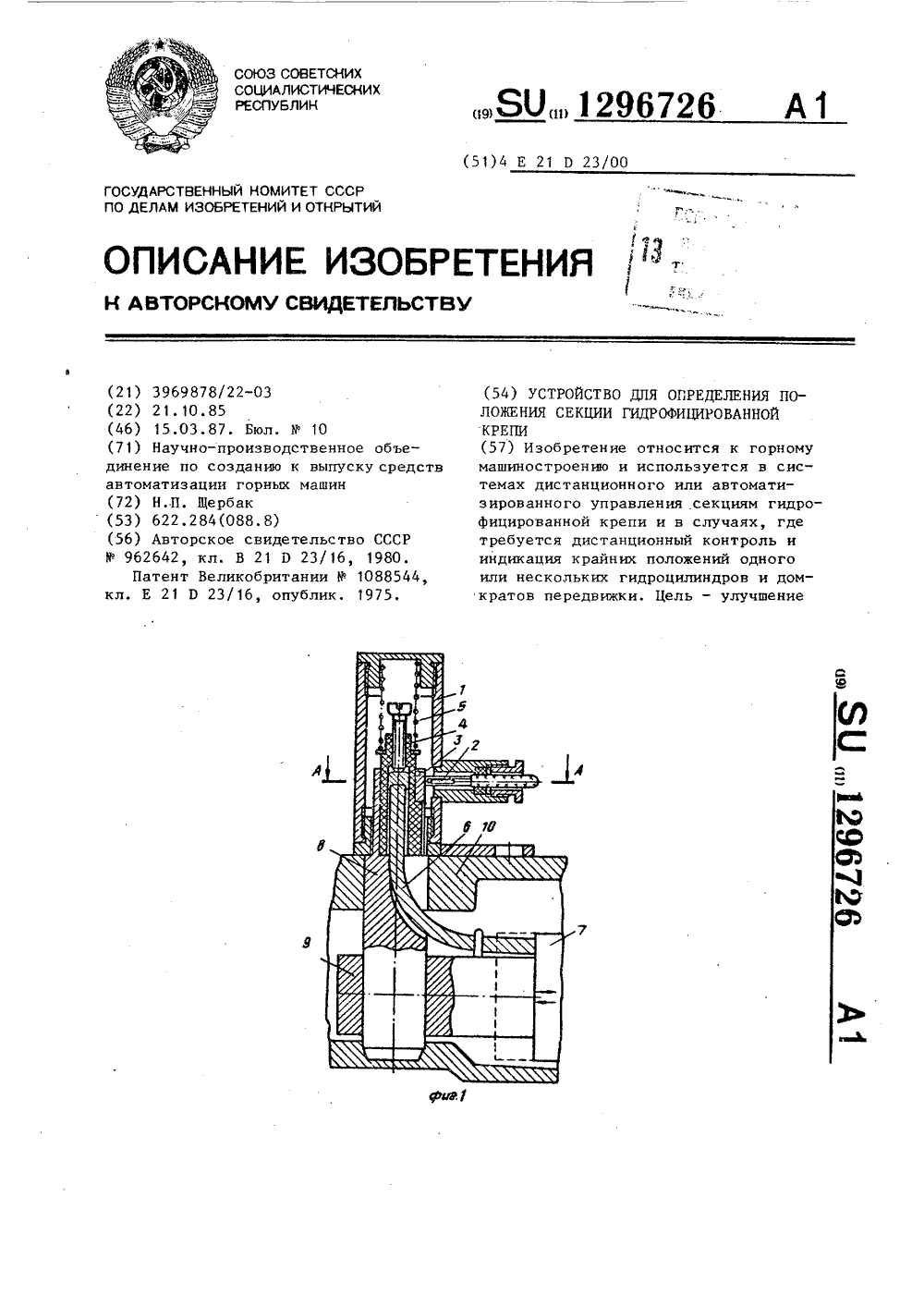
Номер патента: 1296726
Опубликовано: 15.03.1987
Автор: Щербак
МПК: E21D 23/00
Метки: гидрофицированной, крепи, положения, секции
...4 и магнита 3 выходитиз зоны действия магнитного потокаи подает сигнал на пульт управленияо конечном положении секции. 2 ил. 2домкрата передвижки, второй конецразмещен в недвижной направляющей 4.Средняя часть передаточного узла 6расположена в пазу пальца 8, жесткоприкрепленного к неподвижному узлу9 гидрюдомкрата, перпендикулярноего оси. Палец 8 установлен также восновании 10 секции крепи. К основанию 10 секции крепи прикреплен кор 10 пус 1 устройства с подвижной направляющей 4 и,.магнитоуправляемым герконом 2,Передаточный узел может быть выполнен в виде отрезка стального ка 15 ната, обладающего малой поперечнойи высокой продольной жидкостью.Подвижный узел 7 гидродомкратапередвижки может быть либо гидроцилиндром, как показано...
Система автоматической коррекции положения и траектории движения копировального суппорта
Номер патента: 543497
Опубликовано: 25.01.1977
Автор: Абушенков
МПК: B23Q 35/04
Метки: автоматической, движения, копировального, коррекции, положения, суппорта, траектории
...утечки рабочей среды, в качестве которой может быть исполл . зована достаточно вязкая жидкость.Автоматическая коррекция положения и траектории движения копировального суппорта осушествляется следующим образом.При обработке первой детали корректирующий шуп 6 жестко соединен с корпусом гидроцилиндра 8, например, стопорным зажимным винтом или фиксатором ( на чертеже не показано), обработка производится по основному копиру 3. Обрасотанную пеовую деталь 16 устанавлива 1 от в центре и устраняют жесткую связь корректирующего щупа 6 с корпусом гидроцилиндра 8. Затем обрабатывают следующую деталь по двум копирам, Рабочая жидкость по кана.лу 32 поступает под давлением к рабочей щели следящего золотника 2. При рабочей подаче продольного суппорта...
Предыдущий патент: Землеройный рабочий орган бестраншейного дреноукладчика
Следующий патент: Установка для бестраншейной прокладки трубопроводов
Случайный патент: Способ очистки соединений никеля от кобальта