Способ управления траекторией движения судна
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 908656
Автор: Завирухо
Текст
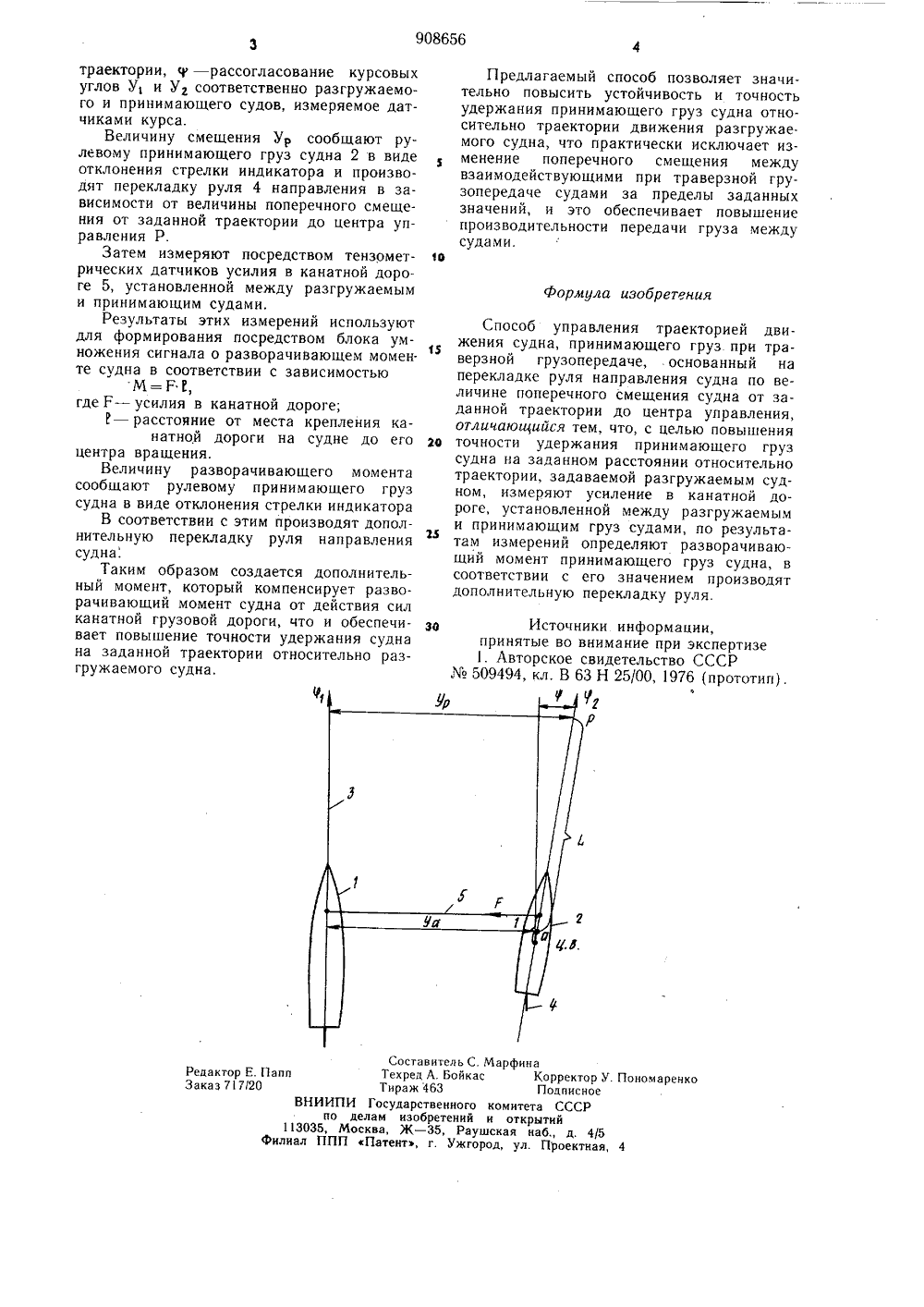
908656 ОП ИСАНИЕ ИЗОБРЕТЕНИЯ Союз СоветскихСоциалистическихРеспублик СВИДЕТЕЛЬСТВУ К АВТОРСКОМУОпубликовано 28.02.82. Бюллетень8Дата опубликования описания 05.03.82 па делам нзобретеннй н открытий(5 ется чертежо способа пояс я в следующе совместного раверзной гр удно 1 явля вижения дл и любое из су влечет за вижения прик управлению астности к упижения судна, раверзной груплавания зопередаче тся задатч принимаю енение его собой измен нимающегораз- иком ние руз 15 20 т усилие в канатноимежду раз гружаегруз судами, по реопределяют разворанимающего груз судо значением произвоерекладку руля. измеряю овленноающим ерений ент привии с е льную п Для этогооге, устани приним ультатам изм ивающий мом а, в соответст ят дополните дор мым с присоединением заявки СОБ УПРАВЛЕНИЯ ТРА Изобретение относитсядвижущимся объектом, в чравлению траекторией двпринимающего груз при тзопередаче.Известен способ управления траекторией движения судна, основанный на перекладке руля направления по величине поперечного смещения судна от заданной траектории до центра управления 1.Однако при траверзной грузопередаче в известном способе не учитывается внешнее возмущение, действующее на судно, принимающее груз и вызывающее отклонение судна от заданной траектории.Цель изобретения - повышение точности удержания принимающего груз судна на заданном расстоянии относительно траектории, задаваемой разгружаемым судном. ТОРИЕЛ ДВИЖЕНИЯ СУ Сущность и заключаетс В случае судов при т гружаемое с траектории д груз судна 2.жения по кур траектории д судна.Впереди по курсу судна 2 выбирают центр угравления Р, определяют путем пересчета измеренных кинетических параметров его движения посредством датчика поперечного смещения и геометрического построителя величину поперечного смещения УР от заданной траектории 3 до центра управления в соответствии с зависимостью Ур =Ус, + оС 9, верной при достаточно малых углах ч, где Уо, - текущее измеряемое датчиком значение поперечного смещения объекта от заданной траектории, А - расстояние от центра управления Р до точки объекрв а, относительно которой производится измерение текущего значения поперечного смещения от заданной908656 формула изобретения Составитель С. Марф пп Техред А. Бойкас Тираж 463 ВНИИПИ Государственного ком по делам изобретений и о 113035, Москва, Ж - 35, Раушска Филиал ППП Патент, г. Ужгород, инаКорректор Подписноетета СССР ткрытийнаб., д. 4/5 ул. Проектная Пономарев Редактор Е, ПаЗаказ 717/20 траектории, с 1 - рассогласование курсовых углов У, и У соответственно разгружаемого и принимающего судов, измеряемое датчиками курса.Величину смещения Ур сообщают рулевому принимающего груз судна 2 в виде отклонения стрелки индикатора и производят перекладку руля 4 направления в зависимости от величины поперечного смещения от заданной траектории до центра управления Р.Затем измеряют посредством тензометрических датчиков усилия в канатной дороге 5, установленной между разгружаемым и принимающим судами.Результаты этих измерений используют для формирования посредством блока умножения сигнала о разворачиВающем моменте судна в соответствии с зависимостьюМ=Г 1)где Г - усилия в канатной дороге;1 в расстояние от места крепления канатной дороги на судне до его центра вращения.Величину разворачивающего момента сообщают рулевому принимающего груз судна в виде отклонения стрелки индикатораВ соответствии с этим производят дополнительную перекладку руля направления судна.Таким образом создается дополнительный момент, который компенсирует разворачивающий момент судна от действия сил канатной грузовой дороги, что и обеспечивает повышение точности удержания судна на заданной траектории относительно разгружаемого судна. Предлагаемый способ позволяет значительно повысить устойчивость и точность удержания принимающего груз судна относительно траектории движения разгружае.мого судна, что практически исключает изменение поперечного смешения между взаимодействующими при траверзной грузопередаче судами за пределы заданных значений, и это обеспечивает повышение производительности передачи груза между судами.1 Ю Способ управления траекторией движения судна, принимающего груз при траверзной грузопередаче, основанный на перекладке руля направления судна по величине поперечного смещения судна от заданной траектории до центра управления, отличающийся тем, что, с целью повышения 2 о точности удержания принимающего грузсудна на заданном расстоянии относительно траектории, задаваемой разгружаемым судном, измеряют усиление в канатной дороге, установленной между разгружаемым и принимающим груз судами, по результатам измерений определяют разворачивающий момент принимающего груз судна, в соответствии с его значением производят дополнительную перекладку руля. 30 Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР509494, кл, В 63 Н 25/00, 1976 (прототип). г Р
СмотретьЗаявка
2909597, 14.02.1980
ПРЕДПРИЯТИЕ ПЯ А-1097
ЗАВИРУХО ВИТАЛИЙ ДМИТРИЕВИЧ
МПК / Метки
МПК: B63H 25/00
Метки: движения, судна, траекторией
Опубликовано: 28.02.1982
Код ссылки
<a href="https://patents.su/2-908656-sposob-upravleniya-traektoriejj-dvizheniya-sudna.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления траекторией движения судна</a>
Устройство для сообщения абразивной ленте поперечных движений

Номер патента: 534342
Опубликовано: 05.11.1976
Автор: Мигунов
МПК: B24B 21/18
Метки: абразивной, движений, ленте, поперечных, сообщения
...шкивом 4.При этом ленте сообщают вращение в направлении с пера на полку ( по стрелке Ч ),Направляющие ленту ролики 5 и 6 установлены на качалке 7 с возможностью поворота вокруг оси вертикального вала 8( механизм для сообщения валу 8 возвратно-вращательных движений на чертежахне изображен). Ролики 6 и 9, расположенные на ведомой ветви ленты, являются нетолько направляющими, но и натяжными.Для этого они закреплены на коромысле 10ось 1 1 поворота которого установлена накачалке 7. Поворот коромысла вокруг оси11, т.е. натяжение ленты, производится,например, грузом 12,Отличительной особенностью устройстваявляется то, что ось вращения ролика 5,направляющего сходящую с копира ветвь 13абразивной ленты 2, закреплена на валу...
Устройство для сообщения абразивной ленте поперечных движений

Номер патента: 557910
Опубликовано: 15.05.1977
Автор: Мигунов
МПК: B24B 21/16
Метки: абразивной, движений, ленте, поперечных, сообщения
...10,установлено на качалке 11, имеющей возможность поворачиваться вокруг осн 12, что осуществляется, например, штоком Гидроцилипд 15 ра 13. Перемещающие ленту направляющиеролики 3 и 4 установлены на оси 14, имеющейвозможность поворачиваться в качалке 11.Отличительной особенностью устройства является то, что с осью 14 жестко соединен ша 20 тун 15, с которым шарнирно связан кривошип16, ось 17 поворота которого установлена настанине станка.Обрабатываемая деталь 18 установлена накоромысле 19 механизма подачи.25 При работе устройства вращается шлифовальная лента, качалка 11 совершает возвратно-качательпые движения вокруг осп 12, перемещая ролики 3 и 4. Ролики 3 и 4 сообщают лепте перемещения поперек контактного3копира 2. Прц перемещении...
Генератор импульсов с заданным смещением

Номер патента: 639126
Опубликовано: 25.12.1978
Авторы: Бондаревский, Вертышев, Носова, Остапенко, Панков, Секацкий
МПК: H03K 3/02
Метки: генератор, заданным, импульсов, смещением
...4 задания смешения базоой линии,Устройство 4 задания смешения базовойлинии соединено с формирующим конденсатором, одна обкладка которого соединенас общей шиной, в другая с выводом согласующего резистора 5, второй вывод которого подключен к ИС и к измерительномуустройству 6, соединенному через раздели-фтельный конденсатор и устройство 7 контроля заряда с устройством 4 задания смешения базовой линии и с формирователем8 импульсов, в коллектор выходного каскада которого включен резистор 9, формирующий конденсатор на чргеже обозначенпозицией 10, а разделительный - 11.Генератор импульсов с заданным смещением с компенсацией основных источников (не поддающихся учету изменений 0выходного тока формирователя импульсови входного тока ИС)...
Транспортное средство для перевозки грузов

Номер патента: 1049295
Опубликовано: 23.10.1983
Авторы: Перов, Пиков, Терентьев
МПК: B60P 7/12
Метки: грузов, перевозки, средство, транспортное
...с другом при помощи шарнира 7, который связан с шарниром другой пары посредством гибкой грузонесущей опоры 8 на которую укладывается груз.Гидроцилиндры 5 и 6 посредством трубопроводов объединены с гидравлической под веской колес транспортного средства в единую гидросистему,. состоящую из гидро- системы грузонесущей опоры и гидросисте: мы подвески колес транспортного средства.Гидросистема каждой опоры транспортного средства состоит из двух пар качающихся гидоцилиндров 5 и 6, соединенных трубопроводами 9 - 16 с делителями потоков 1720, которые в свою очередь соединены трубопроводами 21 - 24 с распределителями 25 и 26, имеющими электропривод-, ное управление, и трубопроводами 2730 с распределителями 31 и 32 с ручным управлением,...
Устройство для определения поперечной координаты центра тяжести пучка заряженных частиц

Номер патента: 1240329
Опубликовано: 15.01.1988
Авторы: Болотин, Брук, Морозов, Тишин, Щербаков
МПК: H05H 7/00
Метки: заряженных, координаты, поперечной, пучка, тяжести, центра, частиц
...входами другого перемножающего цифроаналогового преобразователя 4,Устройство работает следующим образом.Напряжения с обеих пластин пи кап-электрода 1 детектируются линейными детекторами 2, усиливаются усилителями Э постоянного тока и посту И"Ьых= "вх.оп2 -1 где Бьпп - входное опорное напряжение;И - код на цифровых входах; и - разрядность перемножающего цифроаналогового преобразователя;У ьх - выходное напряжение.Напряжение на входах линейных детекторов, а значит и на опорных входах перемножающих цифроаналоговых преобразователей, можно представить в виде+ лБ 111.= 11 - 011 11 + ота12 111- 11юБ2 Иэ условия равенства напряжений на выходах перемножающих цифроанало лают на опорные. входы перемножающих цифроаналоговых преобразователей 4....
Предыдущий патент: Весло гритчина
Следующий патент: Система дистанционного управления
Случайный патент: Крышка цилиндра поршневого компрессора