G05B 19/39 — с комбинацией устройств, отнесенных по меньшей мере к двум из предшествующих рубрик
Устройство для программного управления

Номер патента: 911470
Опубликовано: 07.03.1982
Автор: Лоншаков
МПК: G05B 19/39
Метки: программного
...сигнал 39, пропорциональный разности фаэ между сигналами на входе дискриминатора 28. Разность сигналов 38 и 39 управляет частотой, а следовательно, и фазой выходного сигнала 40 генератора 30. Сигналы 40 и 41. с выходов генератора 30 и 25. соответственно через делители 21, 32 и 17, 26 соответственно поступают на входы дискри. минатора 28, где формируется сигнал 39, пропорциональный разности фаз между сигна. лами на входах дискриминатора 28. Так как при делении частоты сигнала делится и фаза этого сигнала,. разность фаэ между сигналами на входах дискриминатора 28 пропорциональна разности фаз между сигна. лами 40 и 41 на выходах генераторов 30 и 25. Поэтому управление частотой генератора 30 выполняется до тех пор, пока разность фаз...
Устройство для программного управления шлифовальным станком

Номер патента: 983653
Опубликовано: 23.12.1982
Авторы: Востриков, Гаврилов, Мучкин, Сивачек
МПК: G05B 19/39
Метки: программного, станком, шлифовальным
...формирования сигнала 0 (И), определяющего заранее заданный закон изменения скорости съема припуска в функцииего текущего значения, например такого,при котором на предварительном этапе обработки задано постоянное значение скорости съема припуска, а на заключительном - уменьшение скорости съема припуска пропорционально его текущему значениюи окончание обработки при заданном конеччном значении скорости съема припуска.Дифференцирующий фильтр 8 предназначен для двухкратного дифференцированияпоступающего на его вход сигнала 0 спредварительной фильтрацией содержащихся в нем высокочастотных помех,Пренебрегая инерционностью дифференцирующего фильтра по сравнению с инерционностью процесса съема припуска в шлифовальном станке, можно...
Система адаптивного управления металлорежущим станком

Номер патента: 996997
Опубликовано: 15.02.1983
Авторы: Коваль, Коробко, Крончев
МПК: G05B 19/39
Метки: адаптивного, металлорежущим, станком
...величины,при которой стабилизируемая мощность равна первоначально заданной ййо (точка 7 нафиг. 2 а,). Затем система управления должна вернуться в исходное состояние и при следующем возникновении вибраций больше допустимого уровня обеспечивать нх снижение регулированием скорости резания.В соответствии с изложенным алгоритмом построена функциональная схема системы адаптивного управления(фиг. 1).Система работает следующим образом.При подаче питания на устройствотриггер 10 специальной схемой (нафиг. 1 не показана) устанавливаетсяв нулевое состояние, при этом ключ11 замкнут, ключ 5 разомкнут, и блок1 подготовлен к работе, Так как ключ5 разомкнут, то сигнал на выходе релейного звена 38 и на втором входеблока 2 равен нулю, Реверсивный...
Система адаптивного управления металлорежущим станком

Номер патента: 1001013
Опубликовано: 28.02.1983
МПК: G05B 19/39
Метки: адаптивного, металлорежущим, станком
...уровня колебаний от г)одачи, Интенсивность определяется в блоке выцисления допустимойамплитуды.На чертеже приведена функциональная схема системы,система состоит из контура стабилизации, который включает последователь.но соединенные задатчи к 1 мощности,второй элемент 2 сравнения, регугятор3,подачи, при вод )Р подачи, объект, 9управления (процесс резания и несущаясистема), датчик 6 мощности главногопривода станка 5 выход которого соединен с вторым входом элемента 2, иконтура ограничения вибраций, состоящего из датчика 7 амплитуды вибрацийвход которого соединен с вторым выходом объекта 5 блока 8 вычисления изменения допустимой амплитудь 1 первыйвход которого соединен с выходом привода 1, а второй вход - с выходом дат.чика 7 амплитуды...
Устройство для адаптивного программного управления станком

Номер патента: 1003026
Опубликовано: 07.03.1983
Авторы: Ищенко, Шульгиненко
МПК: G05B 19/39
Метки: адаптивного, программного, станком
...Еслиподается код отвода по Х, то генератор 12 подключится к координате Х,что обуславливает. обработку детаг.айтипа вал (Фиг.2). Если подаетсякод отвода по Е, то генератор 12подключится к координате 2, что соответствует обработке деталей типадиск (фиг.З). Рассмотрим работуустройства для деталей типа фдйск, 60После отработки первого кадра вблок 1 вводится второй кадр, содержащий перемещение на рабочей подаче по координате Х из точки 0 черезточку К в точку Л. 65 При отработке этого кадра устройством инструмент 72 в точке К врезается в металл и на выходе датчика8 появляется напряжение пропорциональное усилию резания, которое прикладывается к элементам 9 и 10, пороги срабатывания которых выбранытаким образом, что на их выходахединичный сигнал...
Экстремальный регулятор режима обработки на металлорежущих станках

Номер патента: 1015338
Опубликовано: 30.04.1983
МПК: G05B 19/39
Метки: металлорежущих, регулятор, режима, станках, экстремальный
...5 с блока б поступает сигнална шины записи первых ячеек регистров 3 и 4, осуществляется записькодоВ величин Э, и Ч;, С приходомвторого импульса генератора 5 производится запись кодов величин Э;1и 9;+ во вторые ячейки рет истров3 и 4.В результате на выходах регистров3 и 4 появляются цифровые значениявеличин Э;, Э;и Ч;, Ч; в двоичныхкодах, которые поступают на блоки 11и 12. На, выходах этих блоков формируется единичный сигнал, если числовое значение величин в (+1)-м измерении больше, чем в-м, и нулевойсигнал в противном случае, т.е. блоки сравнения проводят анализ знаковприращений в 1 дп дЭ и в 1 дп аЧ величин 3 и Ч , причем положительномуприращению соответствует единичныйсигнал на выходах.Сигналы с выходов блоков 11 и 12,поступают в...
Устройство для программного регулирования

Номер патента: 1016772
Опубликовано: 07.05.1983
Авторы: Гарбер, Карпенко, Маилов, Мачарашвили
МПК: G05B 19/39
Метки: программного
...содержит блок 1 управления, первый делитель 2 частоты, генератор 3 импульсов, блок 4 восстановления, реверсивный счетчик 5, первый цифро-аналоговый преобразователь 6, суммирующий усилитель 7, управляемый ограничитель 8, исполнительный орган 9, объект 10 регулирования, датчик 11, триггер 12, ключевой эле" мент 13, второй делитель 14 частоты, счетчик 15 импульсов и второй цифроаналоговый преобразователь 16. Блок 4 восстановления содержит элементы И-НЕ 17, 18 и ключевой элемент 19.Управляемый ограничитель 8 выполнен, например, на дифференциальных усилителях и величина его выходного сигнала, поступакщего на вход исполнительного органа 9, зависит от величины выходного напряжения преобразователя 16, задающего уровень...
Устройство для двухкоординатного позиционирования

Номер патента: 1070512
Опубликовано: 30.01.1984
Авторы: Гяляжявичюс, Сталненис
МПК: G05B 19/39
Метки: двухкоординатного, позиционирования
...через коммутатор 30 - с операционным усилителем 31.Логический блок 13 содержитэлементы ИЛИ-НЕ 32-34, элементыИ НЕ 35 и 36 и элемент И 37.Блок 9 производит коррекциютраектории перемещения. Он Формируетсигнал управления для координатногопривода, выполнякщего меньшее перемещение таким образом, чтобы траектория двухкоординатного перемещениясовпала с прямой, соединякщей начало координат с заданной точкой позиционированияКоммутаторы 3 и 4 предназначеныдля переключения входов соответствукщих координатных приводов .От выхода блока управления 2 к выходуфазового дискриминатора 1 2 черезпервый логический блок 13 в зависимости от соотношения заданных перемещений по каждой координате.Координатные приводы 5 и 6 осуществляют координатные...
Устройство для адаптивного управления станком

Номер патента: 1083161
Опубликовано: 30.03.1984
Автор: Коробко
МПК: G05B 19/39
Метки: адаптивного, станком
...воз.врате опорного напряжения контурастабилизации к исходному значениюпосле прохождения вибронеустойчивогоучастка резания может возникнуть следующий режим. Когда подача выйдет на уровень, соответствующий новому значению припуска обработки виброустойчивого участка н новому, повышенно му на одну дискрету (но неравному исходному) значению опорного напряжения, то при дальнейшем постоянном прнпуске Ьбработки повышения подачи происходить не будет, вследствие чего не будет повышаться опорное напряжение, и устройство не будет обеспечивать требуемую производительность обработки. Аналогичный режим может возникнуть прн выходе инструмента иэ вибронеустойчивого участка резания сразу на участок без резания.Цель изобретения - повышение надежности и...
Устройство для адаптивного программного управления станком
Номер патента: 1104469
Опубликовано: 23.07.1984
Авторы: Ищенко, Шульгиненко
МПК: G05B 19/39
Метки: адаптивного, программного, станком
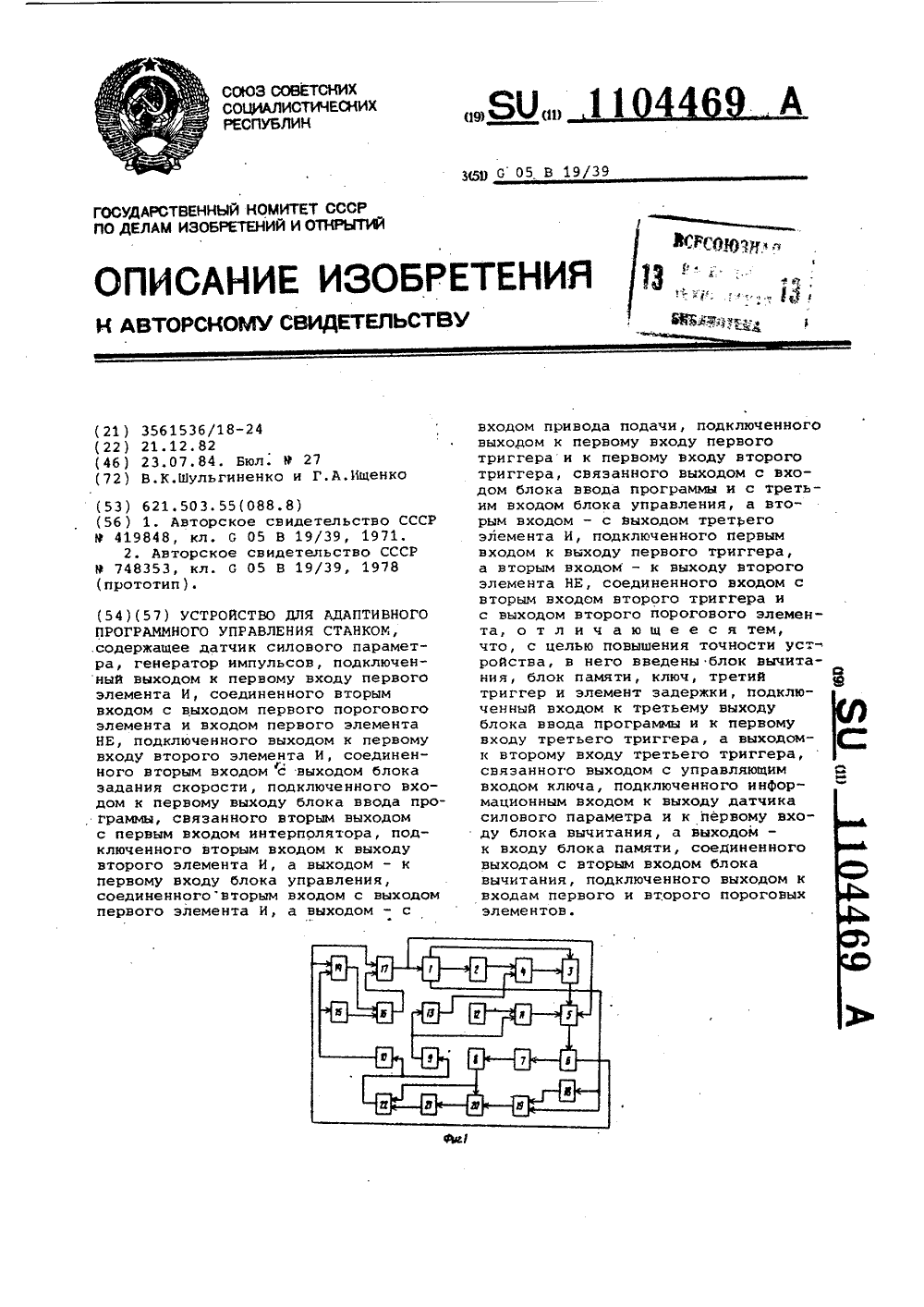
...первый 9 и второй 10 пороговые элементы, первыйэлемент И 11, генератор,12 импульсов,первый элемент НЕ 13, первый триггер 14, второй элемент НЕ 15, третийэлемент И 1 б, второй триггер 17,линию 18 задержки, третий триггер19, ключ 20, блок 21 памяти и блок522 вычитания. Буквами а,б,б,2е,:к,и(фиг. 2)показан контур обрабатываемой детали, а цифрами 23 - 54 - узловые точки движения инструмента55.устройство работает следующимобразом.В начальный момент времени инструмент 55 стоит в точке О (фиг.2 ив блок 1 (фиг, 11 вводится первый 15кадр программы, содержащий перемещение инструмента 55 1 фиг. 2)из точкиО через точку и. в точку. В этомже кадре содержится команда на измерение усилия холостого хода, измеряемого датчиком 8 фиг.1) силового...
Система для двухкоординатного позиционирования

Номер патента: 1249484
Опубликовано: 07.08.1986
Авторы: Гяляжявичюс, Сталненис
МПК: G05B 19/39
Метки: двухкоординатного, позиционирования
...сектора. В 1 и 111 секторах большие двухкоординатные перемещения осуществляютсяс максимально допустимой скоростьюпо оси Х, равной + Ч а скоростьпо оси У определяется уровнем ограничения входного сигнала приводакоординаты У соответствующим регулятором. Во 11 и 1 Ч секторах большиедвухкоординатные перемещения осуществляются с максимально допустимой скоростью по оси 9, равной + Ч а скорость по оси Х определяется сигналом управления приводом координаты Х, ограниченным на соответствующем уровне посредством регулятора той координаты. Например, перемещение из начала координат в точку К (1-й сектор) производится скоординатными скоростями Чх (по координате Х) и Ч (по коор. - динате У), обеспечивающими заданное перемещение по прямолинейной...
Устройство для управления технологическим объектом

Номер патента: 1275377
Опубликовано: 07.12.1986
Авторы: Гарбер, Маилов, Мачарашвили
МПК: G05B 19/39
Метки: объектом, технологическим
...открывает ключевой элемент 3 и поступает на первый вход элемента И-НЕ 16. Так как коды на входах цифрового компаратора 15 равны, то с его выхода на второй вход элемента И-НЕ 16 также поступает сигнал логической "1", На управляющий 15 2 О30 35 ,4 О 45 55 гройства (режим управления от ЭВМ), соединенного с входом 17, При этом . переключение режимов происходит только при равенстве кодов на входах цифрового компаратора 15.Начальное состо1275377 вход коммутатора 7 и первые входы элементов И-НЕ 21 и 22 поступает сигнал логического "О". Регистр 8 подключается к выходу реверсивного счетчика 6, и на цифроаналоговый преобразователь 9 поступает код задающего воздействия, сформированный по командам блока 1 управления цепью: генератор...
Способ ограничения вибраций на металлорежущем станке и устройство для его осуществления

Номер патента: 1278815
Опубликовано: 23.12.1986
МПК: G05B 19/39
Метки: вибраций, металлорежущем, ограничения, станке
...больше допутимого уровня срабатывает пороговое устройство 20 и через элемент И 19 дается разрешение на работу реверсивного элемента 18, который формирует свой выходной сигнал от сигнала логического устройства 4. При поступлении импульса от командного генератора 17 логическое устройство 14 сравнивает выходные сигналы запоминающих устройств 13 и 16 и подает сигнал требуемой полярности на вход .реверсивного элемента 18. При пошаговом изменении скорости резания в одном направлении выходной сигнал устройства 14 не реверсируется. Например, при уменьшении скорости резания относительно исходного значения на вход реверсивного элемента 18 приходят импульсы отрицательной полярности, в результате чего на его выходе формируется отрицательный...
Устройство двухкоординатного позиционирования

Номер патента: 1288653
Опубликовано: 07.02.1987
Авторы: Гяляжявичюс, Марцинкявичюс, Сталненис
МПК: G05B 19/39
Метки: двухкоординатного, позиционирования
...координатного привода 7, определяющих скорость по координате Х при большом значении д Х равном максимально допустимой скорости Ч.Уровень сигнала на выходе элемента И-НЕ 31 зависит от уровня сигнала на выхо - де компаратора 29. В начальный момент двухкоординатного позиционирования изображающая точка находится в начале координат, фиг.2), условие .2)соблюдается независимо от того; какие заданы перемещения по каждой координате и сигналы на выходах коммутаторов 28 и 29 соответствуют логическому "0". Вследствие этого на выходе элемента И-НЕ 3 формируется логическая "1", разрешающая прохождение на вход частотно-управляемого привода 8 управляющих импульсов с преобразователя 4 с частотой, определяющей скорость перемещения по...
Система адаптивного управления металлорежущим станком

Номер патента: 1303996
Опубликовано: 15.04.1987
МПК: B23Q 15/00, G05B 19/39
Метки: адаптивного, металлорежущим, станком
...в частности к системам адаптивного управления уровнем вибраций и загрузки главного привода. 5Цель изобретения - повышение производительности обработки за счет экстремального регулирования амплитуды вибраций инструмента в функции его износа. 10На чертеже приведено устройство в виде функциональной схемы,Контур 1 стабилизации мощности подключен выхоцом к первому входу обьекта 2 управления, к второму входу 15 которого подключен первый блок 3 гашения вибраций, Второй блок 4 гашения вибраций соединен выходом с первым входом контура 1.Датчик 5 вибраций подключен выхо дом к первому входу первого элемента 6 сравнения, на второй вход которого подключен задатчик 7 допустимого уровня вибраций. Датчик 8 скорости износа инструмента подключен к...
Устройство для программного управления металлорежущими станками

Номер патента: 1308987
Опубликовано: 07.05.1987
МПК: G05B 19/39
Метки: металлорежущими, программного, станками
...работает следующим образом.Сигнал с датчика 4 мощности поступает на преобразователь 7, которыйвыдает этот сигнал в виде кода навходы записи регистра 8 памяти и наодин из входов блока 11 сравнения.При наборе приводом 1 рабочей скорос.ти, т.е.,когда код с датчика 2 будет равен коду с задатчика 5, блок3 совпадения кодов вырабатывает сигнал, который через блок 11 сравнениязапускает привод 10 подачи, и, воздействуя на вход разрешения записирегистра 8 памяти, переписывает внего код с преобразователя 7, Блок 9суммирования кодов выдает на вторые входы блока 11 сравнения суммарный код регистра 8 памяти и задатчика б мощности. Таким образом учитывается погрешность, обусловленнаяпотерями холостого Мода привода 1.Блок 11 сравнения выдает...
Самонастраивающаяся система программного управления станком
Номер патента: 1464141
Опубликовано: 07.03.1989
МПК: G05B 19/39
Метки: программного, самонастраивающаяся, станком
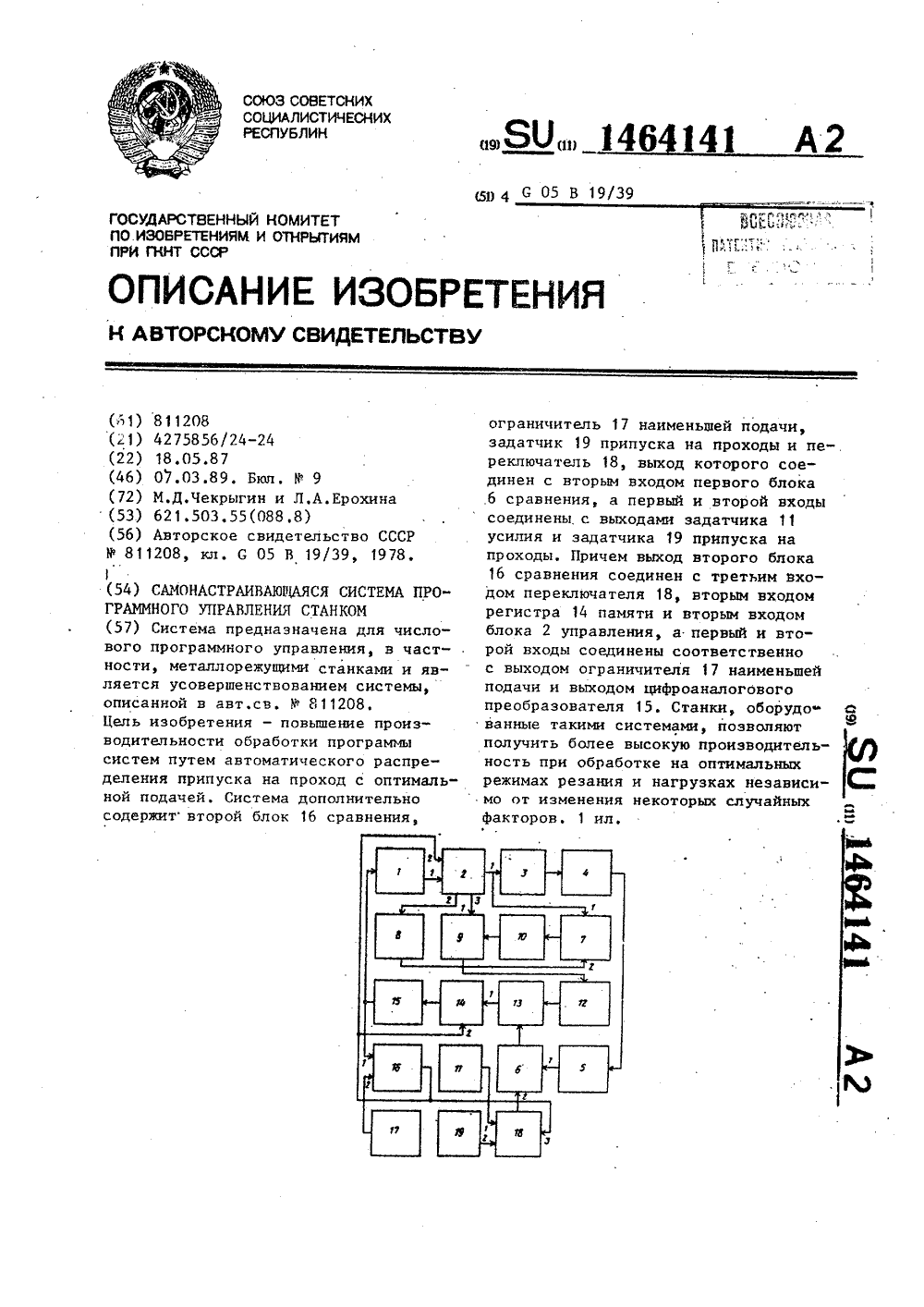
...то на выходе первого блока б сравнения появляется сигнал рассогласования, который через преобразователь АЦП 13 преобразуется в определенное число, соответствующее уровню напряжения рассогласования. Это число записывается в память регистра 14. В соответствии с ним на выходе преобразователя ЦАП 15 появляется сигнал, который, поступая на задающее устройство 1, меняет условия обработки в сторону уменьшения рассогласования.Если припуск уменьшается, то происходит увеличение подачи, а еслиувеличивается, то уменьшение подачи.В это же время каждый вид обработки, задаваемый или по программе,или вручную с пульта оператора станка из блока 2 управления, поступаетна пороговый элемент 9, тем самым регулируя условия ограничения, соответ...
Способ ограничения вибраций технологической системы

Номер патента: 1500995
Опубликовано: 15.08.1989
Автор: Коробко
МПК: G05B 19/39
Метки: вибраций, ограничения, системы, технологической
...16 - Тпо фиг.3).При изменении припуска (т. 8,9 поФЛг, и момент времени Т по фиг.З)подача изменяется, стабилизируя мощ"ность резания на заданном уровне.Способ может быть реализован различными путями, как в аппаратном,таки в программном исполнении (в микропроцессорном устройстве ЧПУ). Устройство в программно-аппаратном исполне"нии изображено на Фнг.5,Устройство содержит блок 1 вводауправляющих программ (УП), буферныйблок 2, блок 3 формирования управляю5 1500995щих сигналов, блоки 4,5 сравнения,цифровые регуляторы 6,7, циФрааналаговые преобразователи 8,9, приводы10, 11 подачи станка, датчики 12,13обратной связи по пути, аналога-цифровые преобразователи 14,15, станок16, датчик 17 мощности, датчик 18вибраций, аналого-циФровые...
Система адаптивного управления металлорежущим станком

Номер патента: 1536356
Опубликовано: 15.01.1990
Авторы: Елисеев, Коробко, Севастьянов
МПК: G05B 19/39
Метки: адаптивного, металлорежущим, станком
...элемента станочного электрооборудования,Устройство содержит задатчик 1температуры, связанный первым выходом с первым входом первого элемента 2 сравнения, второй вход которогоподключен к выходу первого усилителя3, а выход - к входу регулятора 4температуры, задатчик 5 мощности,подключенный входом к выходу регуляторатемпературы, а выходом - к первомувходу второго элемента 6 сравнения,второй вход которого связан с выходом первого усилителя 7 а выход -с первым входом регулятора 8 мощности блок 9 ограничения подачи,подключенный выходом к :орому входурегулятора 8 мощности, выход которого соединен с входом привода 10 подачи, содержащего силовую цепь,состоящую из электродвигателя 11 подачи, силового трансформатора 12 итиристорного...
Адаптивная система управления металлорежущим станком

Номер патента: 1543385
Опубликовано: 15.02.1990
Авторы: Дубровская, Дубровский
МПК: G05B 19/39
Метки: адаптивная, металлорежущим, станком
...выходной сигнал которого, пропорциональный оборотной подаче ЯрнЯподается на блок 8 ограп(об/мин)фничения величины подачи. На другие входы блока 8 подаются с блоков 9 и 10 уставки максимальной и минимальной величин оборотной подачи соответственно. При отклонении величин подачи от установленных. пределов блок 8 формирует сигнал, ограничивающий подачу пределами заданного уровня, Сигнал, пропорциональный текущему значению подачи на оборот, поступает на вход блока 14 умножения, на другой вход которого подается значение величины коэффициента взаимосвязи скорости резания и подачи, Сформированный на выходе блока 14 умножения сигнал К Яоя алгебраически суммируется с задающим сигналом по скорости резания Ч - К Яи сравнивается с сигналом обратной...
Устройство адаптивного управления металлорежущим станком

Номер патента: 1667006
Опубликовано: 30.07.1991
Авторы: Елисеев, Коробко, Севастьянов
МПК: G05B 19/39
Метки: адаптивного, металлорежущим, станком
...свыдержкой времени, на схеме не указано),На чертежах приняты следующие обозначения:О - текущее значение т, (температуры);Л О - приращение т, (температуры);Одоп - уставка т, (температуры);Рн - номинальное значение мощности;Ро - заданное значение мощности;Р) - текущее значение мощности;Оп - напряжение питания.Задатчик мощности может быть выполнен по схеме установки В 1-8.Работа устройства поясняется диаграммами, представленными на фиг, 3,При работе главного электродвигателяс перегрузкой, когда Р)Рп, вентиляторвключается в начале операции (при врезании), Сигнал на включение положительной полярности, равный Р) - Р, проходит с выхода третьего элемента 16 сравнения черезвторой диод 28 и второй нуль-орган 29 на вход логического элемента ИЛИ...