Устройство для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 911470
Автор: Лоншаков



Текст
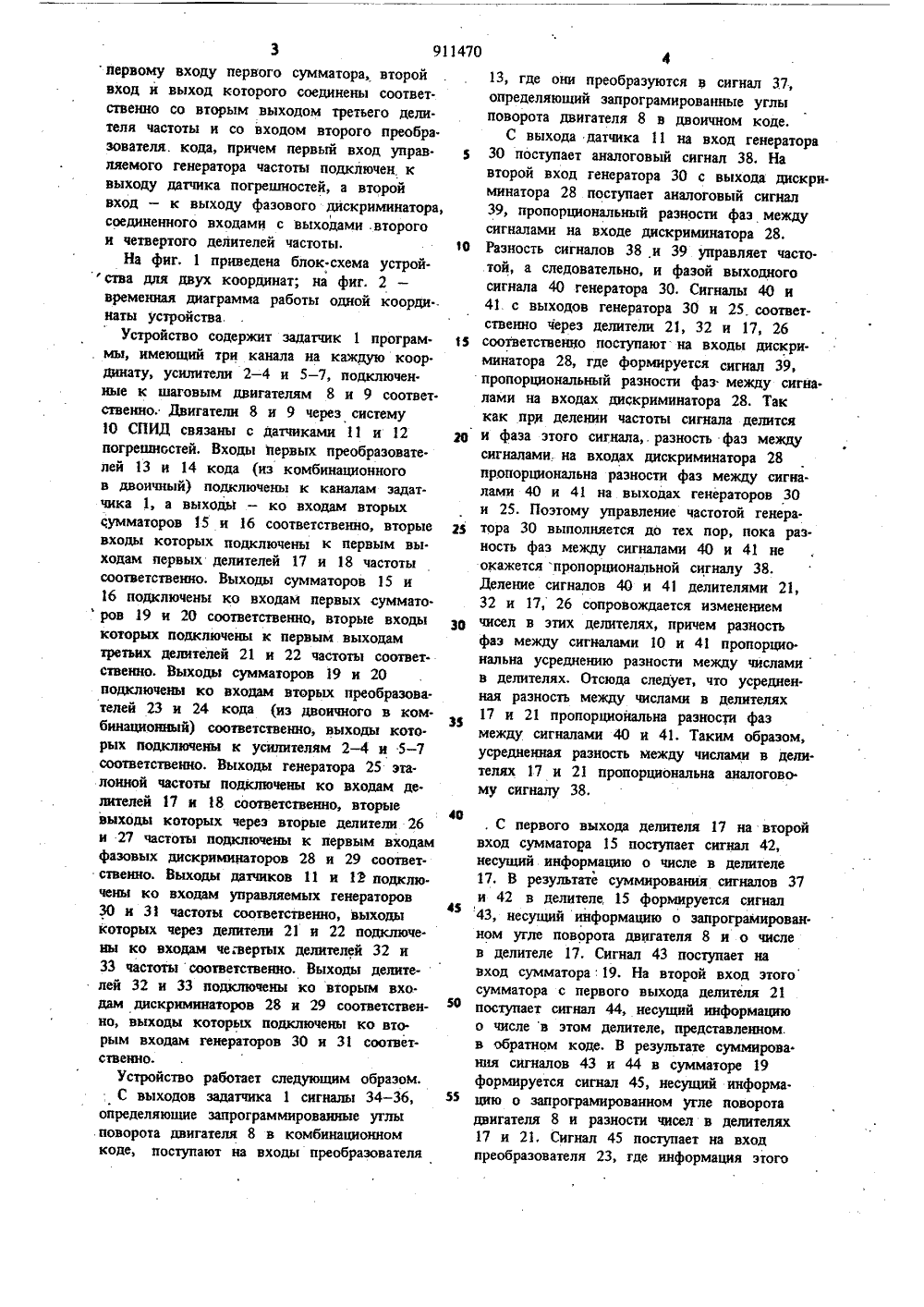
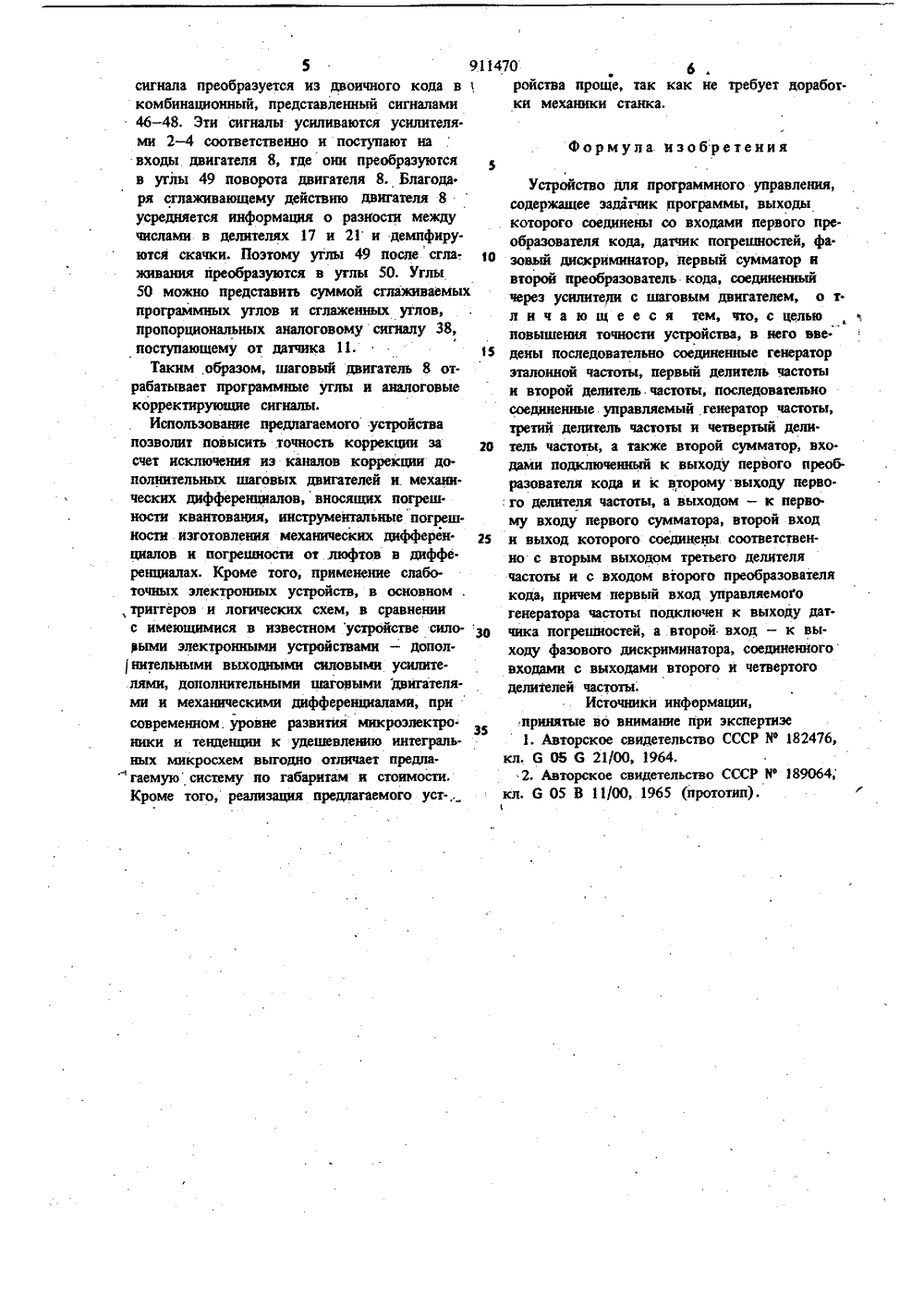
(54) УСТРОЙСТВО п ко. е м орота, выполненное цифференциала 12. Эти системы имеют рекции, ограниченнуюмеханического ди Цель изобретения го остаточную точность качеством изготов. еренциалвышение ко пап-; левия 5а,точности к ка 10го Наиболее близк выовые лов 1.Изобретение относится к автоматике, аименно к программному управлению станками, и предназначено для повышения точности обработки деталей.В программном управлении станками ли широкое применение шаговые системы программного управления, Одной из них является шаговая система программного управления, содержащая источник многоканального задания программы и по каждому калу выходной силовой усилитель, подкл ченный к соответствующему входу щагово двигателя координаты 1. к предлагаемой явля- а программного управлей коррекцией от упруорая также содержит мы, усилители, ищговьщ скриминаторы, систему, оторой подключены , дополнительные полнительные шаг суммирования уг ется шаговая систем ния с автоматическо гих деформаций, кот узел задания програм двигатель, фазовые ди СПИД, к выходам кдатчики погрешностеи ходные усилители, до двигатели, устройство РОГРАММНОГО УПРАВЛЕНИЯ Поставленная цель достигается тем, что . в устройство для программного управления, содержащее задатчнк программы, выходы которого соединены со входами первого преобразователя кода, датчик погрешностей, фазовьщ дискриминатор, первый сумматор . и второй преобразователь кода, соединенный через усилители с шаговым двигателем, введены последовательно соединенные генератор эталонной частоты, первый делитель частоты и второй делитель частоты, последовательно соединенные управляемый генератор частоты, третий делитель частоты и четвертый дели.тель частоты, а также второй сумматор, входами подключенный к выходу первого пре. образователя кода и ко второму выходу первого делителя частоты, а выходом - к911470 1 О 15 20 25 ЗО 35 40 45 50 55первому входу первого сумматора, второй вход и выход которого соединены соответ. ственно со вторым выходом третьего дели. теля частоты и со входом второго преобра. зователя. кода, причем первый вход управ. ляемого генератора частоты подключен, к выходу датчика погрешностей, а второй вход - к выходу фазового дискриминатора, соединенного входами с выходами .второго и четвертого делителей частоты.На фиг, 1 приведена блок-схема устройства для двух координат; на фиг. 2 -временная диаграмма работы одной коорди. -наты устройства.Устройство содержит задатчик 1 програм. мы, имеющий три канала на каждую коор. динату, усилители 2 - 4 и 5 - 7, подключенные к шаговым двигателям 8 и 9 соответственно, Двигатели 8 и 9 через систему 10 СПИД связаны с датчиками 11 и 12 погрешностей, Входы первых преобразователей 13 и 14 кода (из комбинационного в двоичный) подключены к каналам эадатчика 1, а выходы - ко входам вторых сумматоров 15 и 16 соответственно, вторые входы которых подключены к первым вы. ходам первых делителей 17 и 18 частотысоответственно. Выходы сумматоров 15 и16 подключены ко входам первых суммато ров 19 и 20 соответственно, вторые входыкоторых подключены к первым выходамтретьих делителей 21 и 22 частоты соответственно. Выходы сумматоров 19 и 20подключены ко входам вторых преобразова.гелей 23 и 24 кода (иэ двоичного в комбинационный) соответственно, выходы кото.рых подключены к усилителям 2 - 4 и 5 - 7соответственно. Выходы генератора 25 эталонной частоты подключены ко входам де.лителей 17 и 18 соответственно, вторыевыходы которых через вторые делители 26и 27 частоты подключены к первым входамфазовых дискриминаторов 28 и 29 соответственно, Выходы датчиков 11 и И подключены ко входам управляемых генераторов30 и 31 частоты соответственно, выходы которых через делители 21 и 22 подключены ко входам чевертых делителей 32 и33 частоты соответственно, Выходы делителей 32 и 33 подключены ко вторым вхо. дам дискриминаторов 28 и 29 соответственно, выходы которых подключены ко вторым входам генераторов 30 и 31 соответ.с твенно.Устройство работает следующим образом.С выходов эадатчика 1 сигналы 34-36, определяющие запрограммированные углы поворота двигателя 8 в комбинационном коде, поступают на входы преобразователя 13, где они преобразуются в сигнал 37, определяющий эапрограмированные углы поворота двигателя 8 в двоичном коде,С выхода датчика 11 на вход генератора 30 поступает аналоговый сигнал 38. На второй вход генератора 30 с выхода дискри. минатора 28 поступает аналоговый сигнал 39, пропорциональный разности фаэ между сигналами на входе дискриминатора 28. Разность сигналов 38 и 39 управляет частотой, а следовательно, и фазой выходного сигнала 40 генератора 30. Сигналы 40 и 41. с выходов генератора 30 и 25. соответственно через делители 21, 32 и 17, 26 соответственно поступают на входы дискри. минатора 28, где формируется сигнал 39, пропорциональный разности фаз между сигна. лами на входах дискриминатора 28. Так как при делении частоты сигнала делится и фаза этого сигнала,. разность фаэ между сигналами на входах дискриминатора 28 пропорциональна разности фаз между сигна. лами 40 и 41 на выходах генераторов 30 и 25. Поэтому управление частотой генератора 30 выполняется до тех пор, пока разность фаз между сигналами 40 и 41 не окажется пропорциональной сигналу 38, Деление сигналов 40 и 41 делителями 21, 32 и 17, 26 сопровождается изменением чисел в этих делителях, причем разность фаз между сигналами 10 и 41 пропорциональна усреднению разности между числами в делителях. Отсюда следует, что усредненная разность между числами в делителях 17 и 21 пропорциональна разности фаз между сигналами 40 и 41, Таким образом, усредненная разность между числами в делителях 17 и 21 пропорциональна аналогово. му сигналу 38., С первого выхода делителя 17 на второйвход сумматора 15 поступает ситнал 42,несущий информацию о числе в делителе17, В результате суммирования сигналов 37и 42 в делителе, 15 формируется сигнап43, несущий информацию о запрограмирован.ном угле поворота двигателя 8 и о числев делителе 17. Сигнал 43 поступает навход сумматора:19, На второй вход этогосумматора с первого выхода делителя 21поступает сигнал 44, несущий информациюо числе в этом делителе, представленном.в обратном коде. В результате суммировання сигналов 43 и 44 в сумматоре 19формируется сигнал 45, несущий информа.цию о запрограмированном угле поворотадвигателя 8 и разности чисел в делителях17 и 21. Сигнал 45 поступает на входпреобразователя 23, где информация этого9.11470 6, ройства проще, так как не требует доработки механики станка,5сигнала преобразуется из двоичного кода вкомбинационный, представленный сигналами46 - 48. Эти сигналы усиливаются усилителями 2-4 соответственно и поступают навходы двигателя 8, где онн преобразуютсяв углы 49 поворота двигателя 8, Благодаря сглаживающему действию двигателя 8усредняется информация о разности междучислами в делителях 17 и 21 и демпфиру.ются скачки. Поэтому углы 49 после сгла-.живания преобразуются в углы 50. Углы50 можно представить суммой сглаживаемыхпрограммных углов и сглаженных углов,пропорциональных аналоговому сигналу 38,поступающему от датчика 11.Таким, образом, шаговый двигатель 8 отрабатывает программные углы и аналоговыекорректирующие сигналы.Использование предлагаемого устройствапозволит повысить .точность коррекции засчет исключения иэ каналов коррекции дополнительных щаговых двигателей и. механических дифференциалов, вносящих погреш.ности квантования, инструментальные погрешности. изготовления механических дифференциалов и погрешности от люфтов в диффе.ренциалах. Кроме того, применение слаботочных электронных устройств, в основном . ,триггеров и логических схем, в сравнениис имеющимися в известном устройстве силовыми электронными устройствами - дополнительными выходными силовыми усилителями, дополнительными щаговыми )двигателями и механическими дифференциалами, при современном, уровне развития микрозлектро ники н тенденции к удешевлению интегральных микросхем выгодно отличает предлагаемую систему по габаритам и стоимости. Кроме того, реализация предлагаемого уст-,. г Формула изобретения5Устройство для программного управления,содержащее задатчик программы, выходыкоторого соединены со входами первого пре.образователя кода, датчик погрешностей, фа.10 зовьщ дискриминатор, первый сумматор ивторой преобразователь кода, соединенныйчерез усилители с шаговым двигателем, о т.личающееся тем, что,сцельюповышения точности устройства, в него вве 1 э дены последовательно соединенные генераторэталонной частоты, первый делитель частотыи второй делитель частоты, последовательносоединенные. управляемый генератор частоты,третий делитель частоты и четвертый дели.20 тель частоты, а также второй сумматор, входами подключенный к выходу первого преобразователя кода и к второму выходу перво, го делителя частоты, а выходом - к перво.му входу первого сумматора, второй вход25 и выход которого соединены соответственно с вторым выходом третьего делителячастоты и с входом второго преобразователякода, причем первый вход управляемогогенератора частоты подключен к выходу датзо чика погрешностей, а второй вход - к выходу фазового дискриминатора, соединенноговходами с выходами второго и четвертогоделителей частоты.Источники информации,принятые во внимание при экспертизе31. Авторское свидетельство СССР У 182476,кл, 6 Об 6 21/00, 1964.2, Авторское свидетельство СССР йе 189064;кл, 6 05 В 11/00, 1965 (прототип)., Кешели орректор Реда одпис"Патент",жгброд ул. Прое Р 7 И О И Заказ 1124/38СС Тираж 908 ВНИИПИ Государственного комитета по делам изобретений и открытии 113035, Москва, Ж - 35, Раушска на
СмотретьЗаявка
2765997, 17.05.1979
ПРЕДПРИЯТИЕ ПЯ Г-4086
ЛОНШАКОВ ВЛАДИМИР ПЕТРОВИЧ
МПК / Метки
МПК: G05B 19/39
Метки: программного
Опубликовано: 07.03.1982
Код ссылки
<a href="https://patents.su/5-911470-ustrojjstvo-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления</a>
Система передачи и приема сообщений

Номер патента: 734781
Опубликовано: 15.05.1980
Автор: Сафаров
МПК: G08C 19/28
Метки: передачи, приема, сообщений
...Если разность больше единицы младшего (11-1)-разрядного сигнала, то вырабатывается сигнал "О".Сигнал "1 отпирает блок 16 элементов И, через который проходит г 1 -разрядный сигнал сумматора 15, Этот же сигнал через инвертор 17 поступает в блок 18 элементов И, который при этом остается запертым, Сигнал "О, пройдя через инвертор 17, отпирает 5 10 15 20 25 30 35 40 45 4 50 55 блок 18, через который проходит (г -1)- разрямый сигнал, полученный на выходе преобразоватля 12. Ввиду того, что при управляющем сигнале блока 13, равном О, блох 16 заперт, то (О -1)- разрядный сигнал с выхода блока 18 ,поступает поразрядно на элементы ИЛИ 19-21 и проходит через щи на выход системы. Младший азряд выходного О-разрядного сигнала при этом получается...
Устройство для сопряжения

Номер патента: 748402
Опубликовано: 15.07.1980
Авторы: Дшхунян, Кокорин, Овсянникова-Панченко, Петрова, Шевкопляс
МПК: G06F 3/04
Метки: сопряжения
...к внешнему интерфейсу без участия ЭВМ, подключенной к линиям внутрен него интерфейса, устройство выполняет функции передачи информации в эту ЭВМ, которая в данном случае может вести пассивное слежение за "чужими" обменами на общей магистрали. При этом ответные 20 сигналы от данной ЭВМ в магистраль не поступают. Такой режим в системе может оказаться полезным, например, в тех случаях, когда данная ЭВМ введена в режим слежения эа состоянием ячейки памяти с заранее заданным адресом т,е, в общепринятые режимы останов по адресу" или "индикация ячейки памяти". Адресная и числовая информация в режиме слежения передается с линий 51 и 53 в линии 52 и 54. Если обмен по внешней магистрали сопровождается сигналом "запись на линии 57, то...
Устройство для буквенно-цифровой индикации

Номер патента: 742983
Опубликовано: 25.06.1980
Автор: Скляров
МПК: G06K 15/18
Метки: буквенно-цифровой, индикации
...с коэффициентом деления о, ко входу блока 7 опроса сегментов, в связи с чем частотаего переключения в с 1 раз ниже, чемчастота переключения циклов счетчика3, Блок 7 опроса сегментов последовательно опрашивает выходы дешифратора 4. Если на допрашиваемомвыходе дешифратора 4 присутствуетсигнал, то он через элемент 6 И поступает на вторые входы элементов И наБ входе В-Б триггеров 10, Если в этотже момент времени код на входе де-шифратора 4 совпадает с кодом, записанным в каком-либо Регистре 1 дляхранения знака, или в группе регистров 1 для хранения знаков, то появляется высокий уровень напряжения напервых входах элементов И на Я входеВ-Я триггеров 10, которые соответствуют этим регистрам 1 для хранениязнаков. В результате этого...
Устройство для обработки информации при магнитной записи воспроизведении

Номер патента: 1119074
Опубликовано: 15.10.1984
Авторы: Волчок, Говейлер, Куконин, Самошкин, Ярмош
МПК: G11B 27/32
Метки: воспроизведении, записи, информации, магнитной
...к первому входу блока оперативной памяти, соединенного вторым входом со вторым выходом второго формирователя управляющих сигналов, синхроселектор, подключенный первым выходом ко входу формирователя тактовых импульсов и соединенный вторым выходом со вторым входом второго формирователя управляющих сигналов, второй преобразователь кода, подсоединенный первым входом к выходу блока оперативной памяти, блок замешивания кодированных гасящих импуль. сов, подключенный выходом ко входу цифроаналогового преобразователя, соединенного выходом со вторым входом блока обработки видеосигнала, блок согласования, подсоединенный выходом ко входу блока видеоконтроля и соединенный первым входом с выходом блока обработки видеосигнала, узел воспроизведения...
Устройство для перемножения двух биполярных кодовых последовательностей

Номер патента: 206895
Опубликовано: 01.01.1968
Автор: Шевский
МПК: G06F 7/52
Метки: биполярных, двух, кодовых, перемножения, последовательностей
...затем инвертируются логической схемой 5 НЕ и в виде последовательности положительных импуль- СОВ с 1 Вц; Поступ а 10 Т На СооиратеЛЬНую СхС му 6. Логическая схема 7 И перемножает только совпадающие отрицательные импульсы, которые в виде последовательности положительных импульсОВ ьзвых поступают на собирательную схему 6. В канале 11 последовательности 11, и 11 а поступают на логическую схему 8 И, где перемножаются только совпадающие положительные импульсы, которые в виде последовательности отрицательных импульсов Узна поступают на собирательную схему 6. Логическая схема 9 И перемно жает только совпадающие отрицательные им. пульсы, которые затем инвертируются логичей Фх Зэка 679/11 Тираж ИИПИ Комитета по открытий при СоветеМосква, Центр,...
Предыдущий патент: Устройство для комбинированного числового программного управления
Следующий патент: Устройство для контроля пневмореле времени
Случайный патент: Преобразователь активной мощности в код