Промышленный робот
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1414629
Авторы: Морочко, Семенов, Тохтамишян, Шейко, Якушенко





Текст
ВСИЕОЗНИЦррф.1 ОПИСАНИЕ ИЗОБРЕТ объедине ен 0 К 1(. Про%ого, О,ТС 51 ее ЕННЫЙ РО относится к ь использов иностроения атомном ма в роботизир плексах, осу транспорти Целью изоб- ;,ологиче еспечения ра(57) Изобр,ениению и мс,кет бытныотраслях машгии, в частности чи котлостроении,нологических комме коперациоинуюмерных иэделий.ется расширениеностей з.- -.; оо рооотостроено в различи металлуршиностроении ованных техществляющих овку длинноетения являких возможботы с чеориз ага ОСУДАРСТВЕННЫЙ КОМИТЕТО ДЕЛАМ ИЗОБРЕЛИЙ И ОТН АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(56) Манипулятор, модельспект фирмы Яг,арап82.6,5, с. 7,ЛО 1414629 А оптированными изделиям" большев длины. Захват изделий из бункера 40 прспсходит с помощью дополнительного многссекционного магнчтногс схвата, который оиускаст.я в бункер с помогцьь: .али 22. Г 1 ри этомпомощью отклончющегс механизма ма нитный схват опускается по радиусу Г(и поднимается по радиусу Ч определя.мым длиной изделия и радиуссм его изгиба, в ,",езультате чего надежно.ть по;ьема р.возрастает, После подъех а и-,де.ия под него подводится отсекатель 9, на котов- ( оно зате опускается. Далее:.,делие захватывается основным схвато: 7, на губках которого установлены новоэтные и подпру. жинечгые к губкам упоры д,я захвата только объекта, и переносится на транспорти- счФ рующий механизм, выполнен,ыи в виде роликов 30, 39, Для готом тич;кого управ.- ления робог снабжен да;" кампс.," .,ения отсекателя 9, схвата 7, кареки 3 и маг- ( нитного схвата, а также датчиками наличия здели в схвате 7 и секциях магнит- а ного схчат 1. 5 ил.ИзЬбретение относится к, роботостроению И может быть использовано в различных Отраслях машиностроения и металлургии, в частности в атомном машиностроении и когЛостроении, в роботизированных технологических комплексах, осуществляющих межоперационную транспортировку длинно- мерных изделий.Цюь йзобретения - расширение технологических возможностей за счет обеспечения работы с неориентированными изделиями большей длины. На фиг. 1 изображен промышленный роб т, общий вид; на фиг. 2 - вид А иа +иг.иг. 3 - вид Б на фиг. 1; на йиг. 4 - схьат; а фиг. 5 - схема работы механизма ксмиенсации смещения магнитного захвата.Промышленнь.й робот для поштучной вы,.-ци и.,ьн.и. Гных изделий содержит станину 1, на когорой смонтирована направляюйая 2. Каретка 3 установлена с возможностью перемещения по направляющей 2 посредством привода 4 с цепной передаЧей 5. На каретке 3 расположена рука 6 с основньм схватом 7, установленным с возможностью вертикального перемещения и связанным с подвижным звеном привода 8. На станине 1 расположен отсекатель 9 на оси 10, которая установлена с возможностью вращения в вертикальной плоскости фиг. 2) посред.ством привода (не показан), На стан: не 1 усть. овлены также при Вод 1 1 по,"оем а дополн,тельного магнитного схвата 12 с тияющим механизмом, включающим ст лу 13, расположенную перпендикулярно наиоавляющей 2, иа конце которой .естко з креилена ось 14. Посредством двух тросиков 15 ось 4 иа-:.ирно соединена ;. магнитным схватом 12.На губках 16 и 17 схвата 7 устано иены с возможностью поворота упоры 18 и 1 В, подпружиненные к губкам, На станине установлены датчики 20 и 21 положения каретки 3 йа на; раьл,.ющей 2. На тали 2. привода 11 установлены датчики 23 и 24 положения магнитного схвата 12. На рук 6 установлены датчики 25 - 2 положения схвати 7, на котором усгановлс ы датчики 28 и 29 положеиия губок 16 и 17. Кро:,.е того, на схвате 7 установлен датчик 30, содержащий поде; жную планку 31, установленну 1 о верт кально.Магнитный схват 12 состоит из нескольких (например, трех) секций, которые уста новлены с возможностью вращения вокруг оси 32, На каждой с.кции магнитного схвата 12 установлен датчик 33 наличия изделия, каждаяподвижная планка 34 которого установлена горизоитально. Датчики 20, 21, 23 - 30 и 33 электрически связаны с системой 35 управления, Пусковая электроапгаратура промышленного робота установленав электрическом шкафу 36. Давление наприводы исполнительных органов подаетсяс гидростанции 37. Приемное устройство состоит из приводного 38 и зажимного 39роликов.Бункер 40 предназначен для укладкидлинромерных изделий 41. Ьа каретке 3устайовлен флажок 42, " взаимодействующий при определенных положениях карет 10 ки 3 с датчиками 20 и 21. На канатоуклад/чиках 43 и 44 тали 22 установлены флажки45 и 46, взаимодействующие при определенном положении канатоукладчиков 43 и 44с датчиками 23 и 24. На схвате 7 установленфлажок 47, взаимодействующий при определенном его положении на руке 6 с датчиками 25 - 27. Кроме того, в роботе имеютсядатчики положения отсекателя 9. На губках 16 и 17 установлены флажки 48 и 49,взаимодействующие соответственно с дат 20 Чиками 28 и 29.Промышленный робот работает следуюцим образом.Оператором в режиме Наладка с пульта системы 35 управления исполнительные25 элементы робота приводятся в исходное состояние, а именно: каретка 3 находится вкрайнем правом положении, при этом флажок 42 перекрывает датчик 21; схват 7 находится в среднем положении, при этомфлажок 47 перекрывает датчик 26; магнитЗО ный схват 12 находится в верхнем рабочемположении, при этом флажок 46 перекрывает датчик 24; отсекатель 9 повернут вкрайнее положение против часовой стрелки(фиг. 1); губки 16 и 17 схвата 7 разделены,при этом флажок 48 взаимодействует с датчиком 28 положения.Кроме того, на систему 35 управлениядолжны поступать сигналы о наличии изделий 41 в бункере 40 в исходном положениироликов 38 и 39 (ролик 38 не вращается,40 а ролик 39 раскрыт), а также сигналы оботсутствии персонала в зоне работы роботаи закрытии калиток ограждения (не показано).Программа работы должна быть запи 4 сана в память системы 35 управления.При выполнении этих условий оператор отрабатывает команды в режиме Цикл, приотсутствии сбоев в программе производитпереключение на работу робота в режимеАвтомат,Робот в режиме Автомат работзет следующим образом.По команде с системы 35 уиразлениявключается таль 22 (далее все пер.мещения в режиме Автомат происходят по ко.мандам системы 35 управления, магнитный схват 12 опускается вниз до тех пор, пок и".,".г,ижная плгнка 34 одного из датчиков 33 не кинется изделий 41, ири дальней.5 10 15 20 25 35 4 О 4", И шем вертикальном перемещении магнитного схвата 12 планка 34 остается на месте и через систему рычагов (не показано) включает датчик 33, таль 22 выключается, подаются импульсы, Иамагничивающие магнитный схват 12, при этом захватываются изделия 41, после чего включается таль 22, магнитный схват 12 поднимается вместе с изделиями 41. Подъем Происходит до тех пор, пока флажок 45 не перекроет датчик 23, после чего ось 10, а следовательно, и отсекатель 9 под дейсгвием привода (не показан) поворачивается на 90 по часовой стрелке, таким образом отсекатель 9 оказывается под приподнятыми магнитным схватом 2 изделиями 41.Включается таль 22, магнитный схват 12 опускается до тех пор, пока между отсекателем 9 и приподнятыми изделиями 41 зазор не уменьшится до 40 - 100 мм, а флажок 46 не перекроет датчик 24, затем на магнитный схват 12 поступают размагничивающие импульсы, в результате чего изделия 41 ложатся на отсекатель 9. После этого включается привод 4, передающий посредством цепей передачи 5 движение каретке 3, которая движется влево (фиг, 1) до тех пор, пока изделие 41, лежащее справа на отсекателе 9, не окажется в зеве губок 16 и 17. При дальнейшем движении изделие 41 надавливает на планку 31, что приводит к срабатыванию датчика 30 и остановке каретки 3. Дается команда на зажим схвата 7, губки 16 и 17 движутся друг к другу, пока флажок 49 не перекроет датчик 29, при этом положение между изделием 41 и обращенными к нему сторонами губок 16 и7 образуется зазор в 3 - 5 мм.Выпаданию изделия 41 из схвата 7 при дальнейшей манипуляции припятствуют упоры 18 и 19. Кроме того, упоры 18 и 19 при сближении губок 16 и 17 отбрасывают соседние слева изделия 41, в результате чего в схвате 7 всегда оказываетсй одно изделие 41. После этого включается привод 4, каретка 3 начйнает двигаться вправо, пока флажок 42 не перекроет датчик 20, каретка 3 останавливается. В этом. голожении ось изделия 41, оказывается пол, роликом 38. Включается привод , схват 7 вместе с изделием 4 опускается, вниз, до тех пор, пока флажок 47 не перекроет датчик 25, после чего схват Т останавливается, В этом положейии изделие 41 должйо оказаться на ролике 38, ролик 39 зажимает изделие 41, губки 16 и 17 схвата 7 разжимаются до тех пор, йока флажок 48 ие перекроет датчик 28. ,.рабатывает привод 4, каретка 3 движется вправо, пока флажок 42 не перекроет дагчик 21, после чего он останавливается, схват 7 посредством поивода 8 поднимается до тех пор, пока флажок 47 не перекроет датчик 26, после чего привод 8 останавливается. Включается ролик 38 и изделие 41 подается на следующую операцию.После того как изделие 41, заведенное между роликами 38 и 39, будет подано на следующий технологический участок, ролик 39 отходит в исходное положение. Дальнейшая работа робота зависит от наличия изделий 41 на отсекателе 9, при их отсутствии все его элементы выводятся в исходное состояние и повторяется весь цикл, описанный выц:е, При наличии изделий 41 на отсека- теле 9 повторяются манипуляции исполнительных органов робота, описанные после операции, кладки изделий 41 на отсекатель 9,Для обеспечения подьема концов длин- номерных изделий 41 предназначен отклоняющий механизм магнитно": схва; а, состоящий из стрелы 3, оси .дву., тросч ков 15. При опускании магчигного схвата 12 его движение происходит по ду.е радиусом К, а подъем - по дуге Р дусох К определяемым длиной изделия и радиусом его изгиба. При больших значениях К и Й; в пределах 3 - 5 м рассогласование оказывается незначительным, в результате чего надежность подъема резко возрастает. Форглп изоб;.:тгн гчПромышленнь:и робот, содержащий станину с направляющей, на которой установлена каретка с приводом с. перемещения, и расположенную на каретк руку с основным схватом, имеющим заж,мные губки, отличающийся тем,то, с,;елью расширения технологических возможностей за счсг обеспечения работы с неориентировнными изделиями большей длины, он снабжен дополнительным многосекционным магнитным схватом с приводом его вертикального перемещения, отклоняющим механизмом магнитсхзата, вь;полне,".йьг; в виде стрел. закрепленной на стыяине .ерпендикулярно направляющей кареткиодин конец которой через гибкие тяги связан с магнитым схвагои,. отсекателем, установленным на ста ине с возможностью поворота в плоскости, параллельной плоскости перемещения каретки, датчиками положения отсекателя, схвата, каретки, и магнитного схвата, а также датчиками наличия изделия в основном схвате и в секциях дополнительного магнитного схвата, при этом основной схват снабжен упорами, каждый из которых расположен на соответствующей губке с возможностью поворота и подпружинен к неи.Составитель Ф. МайоровРедактор А. Мотыль Техред И. Верес Корреьгор г . и 1 арошиЗаказ 3823/15 Тираж 908 ПодписноеВНИИПИ Государственного комитета СССР по делам изобретений и открытий13035, Москва, Ж - 35, Рауиская наб., д. 4/5Производственно-полиграфическое предприятие, г. Ужгород, с . 1, оектная, 4
СмотретьЗаявка
4181442, 14.01.1987
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "АТОМКОТЛОМАШ"
СЕМЕНОВ ОЛЕГ ГЕОРГИЕВИЧ, ЯКУШЕНКО МИХАИЛ ФЕДОРОВИЧ, ШЕЙКО АЛЕКСАНДР САВЕЛЬЕВИЧ, МОРОЧКО АННА ТАТЕОСОВНА, ТОХТАМИШЯН ЛЕОН МКРТЫЧЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: промышленный, робот
Опубликовано: 07.08.1988
Код ссылки
<a href="https://patents.su/5-1414629-promyshlennyjj-robot.html" target="_blank" rel="follow" title="База патентов СССР">Промышленный робот</a>
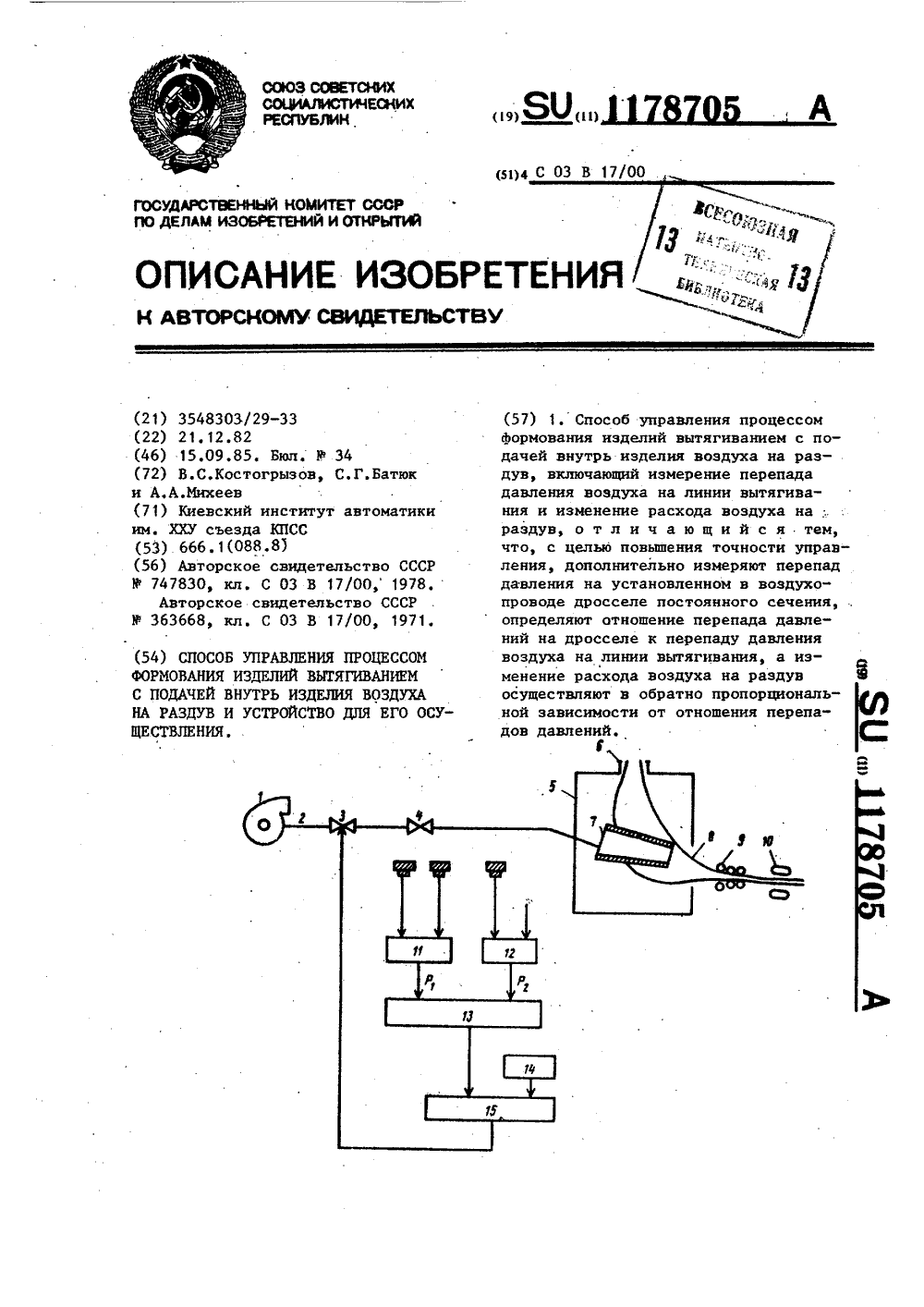
Способ управления процессом формования изделий вытягиванием с подачей внутрь изделия воздуха на раздув и устройство для его осуществления
Номер патента: 1178705
Опубликовано: 15.09.1985
Авторы: Батюк, Костогрызов, Михеев
МПК: C03B 17/00
Метки: внутрь, воздуха, вытягиванием, изделия, подачей, процессом, раздув, формования
...которое представляет собой отношение перепадов давления на различных гидравлических сопротивлениях - на постоянном сопротивлении, характеризуемом величиной ар , и на переменном сопротивлении линии вытягивания, изменяющимся при изменении среднего по длине линиивнутреннего диаметра и характеризуемом величиной Ьр, Так как расход воздуха по длине воздухопровода и линии вытягивания одинаковый, отношение ар /Ьр не зависит от расхода воздуха и определяется только геометрическими характеристиками сопротивлений и температурами воздуха Т и Т 2. При постоянных температурах, что яв1178705 4 Заказ 5604/19 . Тираж 457 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д. 4/5Филиал ППП...
Схват манипулятора

Номер патента: 994252
Опубликовано: 07.02.1983
Авторы: Карпов, Корганова, Цибер
МПК: B25J 15/00
Метки: манипулятора, схват
...из сащх длинных пальцев 20 снабжены несколь О кими датчиками прикосновения и сферическими наконечниками, например, из Фторопласта. Остальные самые . длинные пальцы 21 снабжены наконечниками плоской формы с резиновыминакладками.45Схват работает следующим образом.В исходном положении пальцы схвата разогнуты, как показано на фиг.1, и сведены концами к вертикальнойоси 02 схвата под действием пружин6 и 15, Гребенчатые стопорные планки 7 находятся в переднем положении.При повороте ведущего полого валас конической шестерней 3 по часовойстрелке все пальцы разводятся в сто роны, пока зубцы планок 7 не попадут в пазы втулок 5 и не заФиксируют все пальцы (кроме пальцев 20) в раэ" веденном положении. Схват устанавливают так, чтобы верхний упор 19...
Схват манипулятора

Номер патента: 1060466
Опубликовано: 15.12.1983
Авторы: Ботез, Дибнер, Морошан, Попа
МПК: B25J 15/00
Метки: манипулятора, схват
...цель достигаетсятем, что схват манипулятора снабженисточниками технологического агента,установленными на ладони, и шлангами, расположенными вдоль боковыхповерхностей звеньев пальцев, причемшланги связаны с этими источниками,а в каждом звене пальца выполненыканалы, соединенные герметично сошлангами и выходящие на рабочуюповерхность звеньев.На фиг,1 схематически изображенсхват манипулятора, общий вид; нафиг.2 - отдельное звено пальца, 40на фиг.3 - разрез А-А на фиг.2,на фиг.4 - вид Б на фиг.2, на фиг.5 герметичное соединение шланга сотверстием звена. При составлении пальца звенья 2 установлены своими направляющими 5 на пружинящем элементе 12, а выступ 10 звена входит во впадину 11 соседнего звена. В каждом звене 2 выполнено глухое...
Схват манипулятора

Номер патента: 585964
Опубликовано: 30.12.1977
Автор: Токарев
МПК: B25J 15/00
Метки: манипулятора, схват
...9 смонтированы ролики 11, взаимодействующие с закрепленными на гидроцилиндре 2 кронштейнами 12. Деталь 13, например, кулак поворотный автомобиля, переустанавливаемая с одной позиции на другую, базируется по поверхностям А и Б в посадочном отверстии, вследствие чего эти поверхности не могут быть использованы для крепления детали в схвате. Флаисц 13 этой885964 15 зд 1 О Заказ 2979/1 ираж 1130 писиое ппография, пр. Са детали имеет необработанную поверхность, положение которой относительно базирующей поверхности может значительно колебаться.Схват манипулятора работает следующим образом. В исходном положении поршни 3 и 5 сведены, шток 4 поднят, а захватные рычаги 9 опущены и разведены с помощью роликов 11, касающихся кронштейнов 12, за...
Устройство для стыковки сменного схвата с рукой манипулятора

Номер патента: 1556896
Опубликовано: 15.04.1990
Автор: Захаров
МПК: B25J 15/04
Метки: манипулятора, рукой, сменного, стыковки, схвата
...сменный схват 7, на торцовой части которого закреплен посадочный штырь 8. Первый постоянный кольцевой магнит 3 имеет возможность поворота по резьбе относительно руки манипулятора 1 и может быть зафиксирован контргайкой 9. Схват расположен в гнезде 10 кассеты 11, предназначенной для хранения сменных схватов. В руке манипулятора 1 выполнен канал 12 для подвода рабочей среды к сменному схвату 7. На посадочном штыре 8 установлено уплотнительное кольцо 13. Торцовая часть кассеты 11 выполнена из магнитного материала.Устройство работает следующим обрапостоянный кольцевой магнит 3 устанавливается на руке манипулятора 1 в такое положение, чтобы при стыковке с постоянным кольцевым магнитом 5 их разноименные полюса совместились. Это положение...
Предыдущий патент: Манипулятор
Следующий патент: Захватное устройство
Случайный патент: Универсальный деревообрабатывающий станок