Способ управления исполнительным двигателем следящего привода с люфтом в механической
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 389604
Авторы: Подвальных, Филатов, Хлыпало, Шаров

Текст
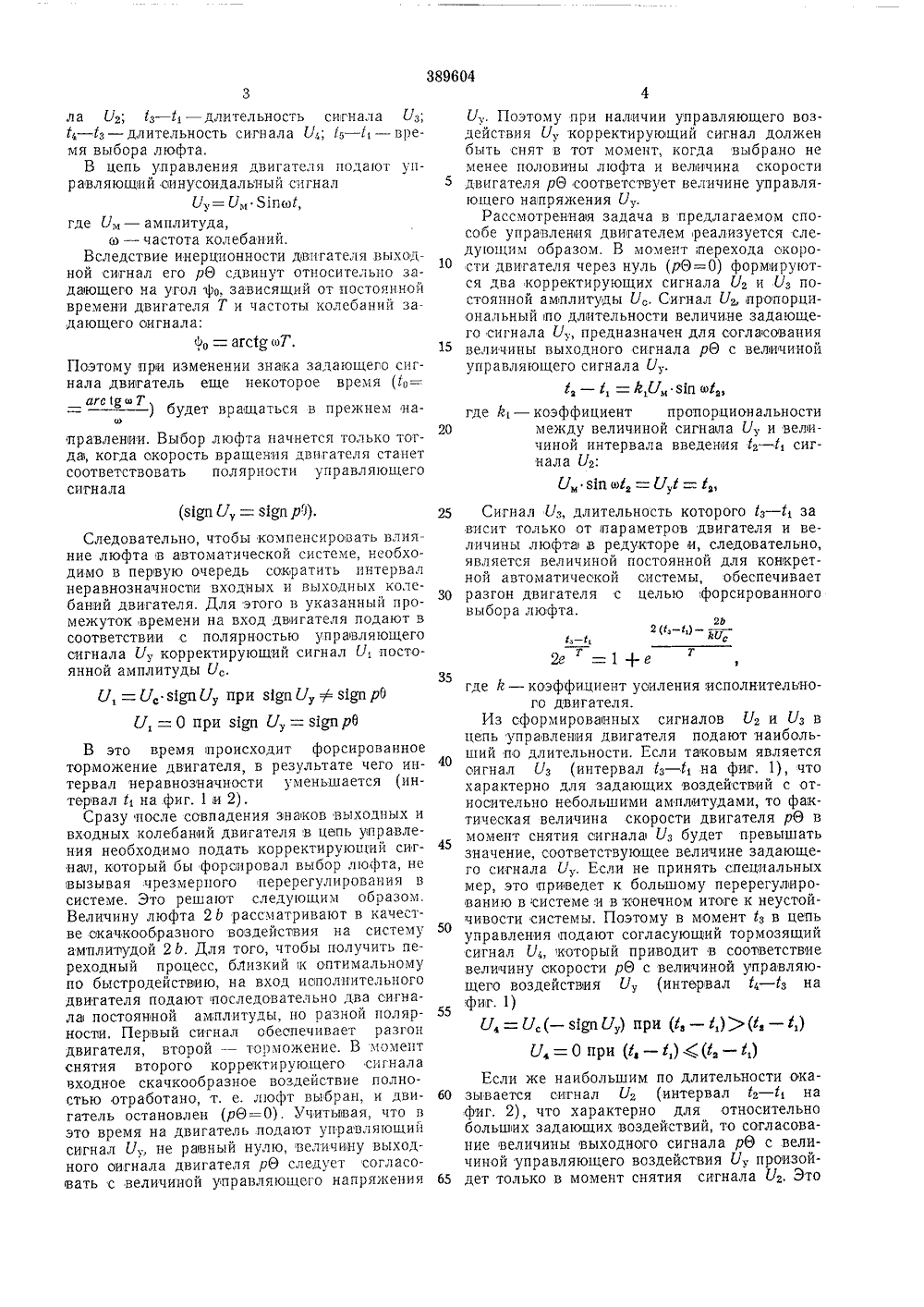
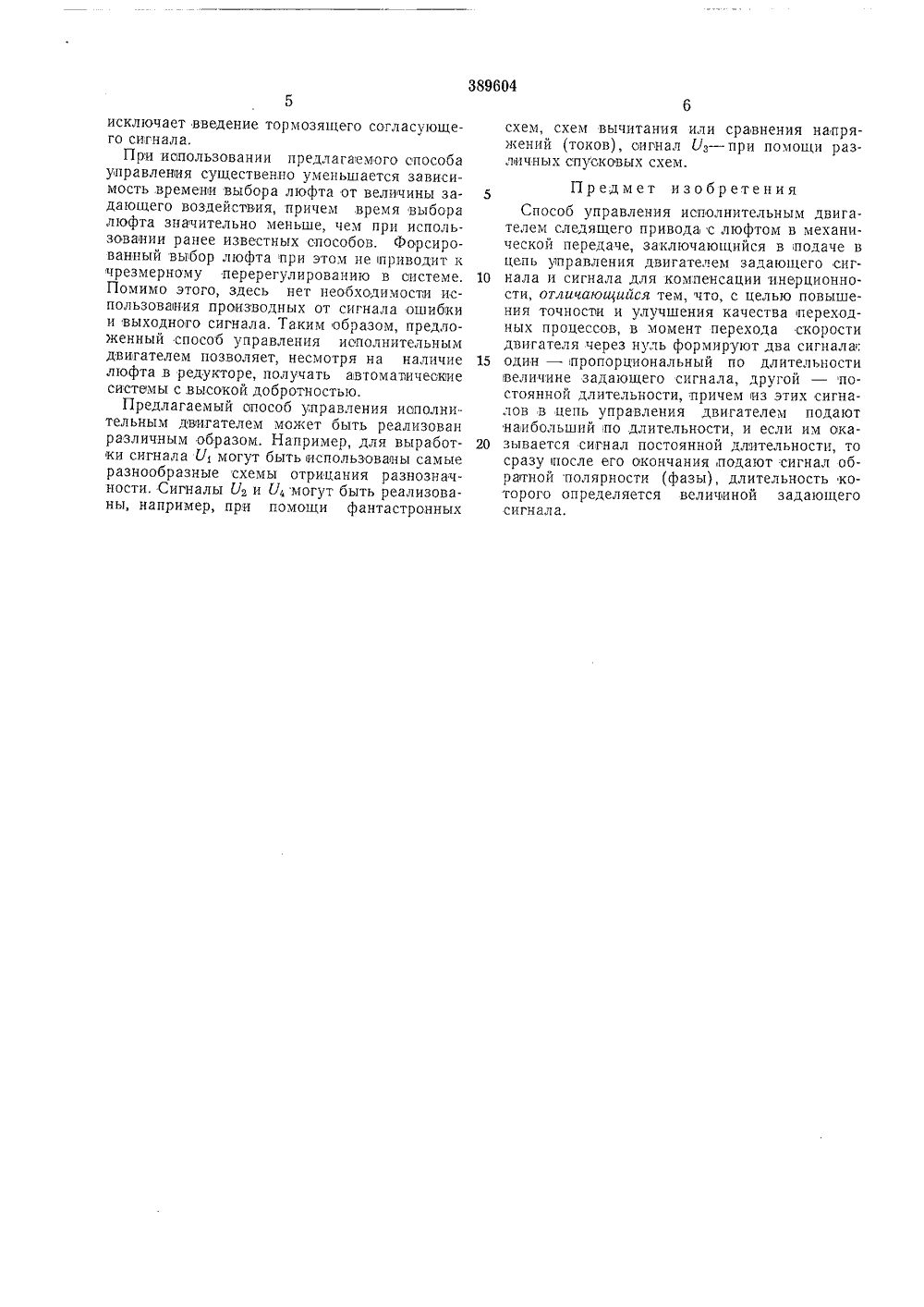
ЗЗУ 604 ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советских СОцидлистииеских Республик.1968 (М 82583/ Н 02 р 5/066 05 Ь 11/00 с присоединением заявкПриоритетОпубликовано 05 Х 11.19 осударствоеый комитетСовета Миннстроо СССРпо делан иао 11 ретепийк открытий юллетень29 ДК 621.3.078:621,3,.088(088,8)Дата опубликования описания 12.Х 1.19 Авторыизобретения И, Хлыпало, А, С. Подвальных, И илатов и а ов аявитель ПОСОБ УПРАВЛЕ СЛ ЕДЯЩЕГО П Р ИСПОЛНИТЕЛЬНЫДА С ЛЮФТОМ В М ПЕРЕДАЧЕ В И ГАТЕЛ ЕМ НИЧЕСКОЙ Предлагаемый способ управления исполнительным двигателем относится к регулированию электрических двигателей в зависимости от их параметров.Известен способ управления исполнительными двигателями следящего привода с люфтом в механической передаче, заключающийся в подаче в цепь управления двигателем задающего оигнала и сигнала для компенсации инерционности.Однако зависимость длительности корректирующего сигнала и времени выбора люфта от величины, входного воздействия не позволяет для увеличения эффективности управления применить увеличение длительности корректирующего сигнала. При малых входных воздействиях это приводит к появлению автоколебаний и в конечном итоге к неустойчивости всего следящего привода.Изобретение позволяет повысить точность и улучшить качество переходных процессов следящего привода с люфтом в механической передаче. Это достигается,путем существенного уменьшения зависимости времени выбора люфта от величины входного воздействия.По предлагаемому способу с целью повышения точности и улучшения качества переходных процессов в момент перехода скорости двигателя через нуль формируют два сигнала: один - пропорциональный по длительности величине задающего сигнала, другои - постоянной длительности, определяемой величиной люфта и инерционностью двигателя. Из сформированных сигналов на двигатель пода ют наибольший по длительности и если имоказывается сигнал постоянной длительности, то сразу после его окончания подают сигнал обратной поляоности (фазы), длительность которого определяется величиной входного О сигнала.Предлояенньй способ иллюстрируется чертежами.На фиг. 1 представлены эпюры входных ивыходных сигналов исполнительного двигате ля при ма, и х амплитудах колебаний; нафиг. 2 - эпюры входных и выходных сигналов исполнительного двигателя при ссбольших амплитудах колебания.На чертежах обозначено: У, - управляющий О несксрректированный сигнал; рО - скоростьвращения двигателя (или сигнал, пропорциональный ей); 01 - корректирующий сигнал, формируемый во время несовпадения знаков задающего и выходного (скорости) сигналов 5 двигателя; С/2 - корректирующий сигнал, пропорциональный по длительности величине задающего сигнала; ЕУ - корректирующий сигнал постоянной длительности; 1l - согласующий корректирующий сигнал; 1 - длитель- О ность сигнала У,; 1 - 1 - длительность сигна ла СЪ; 1 з - 1 - длительность сигнала Сз,- 1 з - длительность сигнала 1 Л; ; - 11 - время выбора люфта,В цепь управления двигателя подают унравляющий оинусоидальный сигналУ= УКпо 1,где Ум - амплитуда,а - частота колебаний.Вследствие инерционности двигателя,выходной сигнал его рО сдвинут относительно задающего на угол ф 0, зависящий от постояннойвремени двигателя Т и частоты колебаний за,дающего сигнала:ф, = агс 1 дсоТ,Поэтому ари изменении значка задающего сигнала двигатель еще некоторое время (10=асс 1 дсо Т) будет вращаться в прежнем направленни. Выбор люфта начнется только тотда, когда скорость вращения двигателя станетсоответствовать полярности управляюшегосигнала(з 1 дпУ = з 1 дпр 0),Следовательно, чтобы компенсировать влияние люфта в автоматической системе, необходимо в первую очередь сократить интервал неравнозначности входных и выходных колебаний двигателя. Для этого в указанный промежуток времени на вход двигателя подают в соответствии с полярностью управляющего сигнала У корректирующий сигнал У, постоянной амплитуды У,.У, = У, з 1 дп У при з 1 дп У + з 1 дп р 0У, = О при з 1 п Уу = за роВ это время происходит форсированное торможение двигателя, в результате чего интервал неравнозначности уменьшается (интервал 1 на фиг. 1 и 2).Сразу после совпадения эиаков выходных и входных колебаний двигателя в цепь управления необходимо подать корректирующий сигнал, который бы форсировал выбор люфта, не вызывая чрезмерного перерегулирования в системе, Это решают следующим образом, Величину люфта 2 Ь рассматривают в качестве скачкообразного воздействия на систему амплитудой 26. Для того, чтобы получить переходный процесс, близкий к оптимальному по быстродействию, на вход исполнительного двигателя подают последовательно два сигнала постоянной амплитудыно разной полярности. Первый сигнал обеспечивает разгон двигателя, второй - торможение. В момент снятия второго корректирующего сигнала входное скачкообразное воздействие полностью отработано, т. е. люфт выбран, и двигатель остановлен (рО=О). Учитывая, что в это время на двигатель подают управляющий сивнал У,., не равный нулю, величину выходного сигнала двигателя рО следует согласовать с величиной управляющего напряжения 3896044У, Поэтому при наличии управляющего воздействия У,. корректирующий сигнал долженбыть снят в тот момент, когда выбрано неменее половины люфта и величина скоростидвигателя рО соответствует величине управляющего напряжения У,Рассмотренная задача в предлагаемом способе управления двигателем реализуется следующим образом. В момент перехода скорости двигателя через нуль (рО=О) формируются два корректирующих сигнала Уг и Уз постоянной амплитуды 1l,. Сигнал Упропорциональный по длительности величине задающего сигнала 1/ предназначен для согласованиявеличины выходного сигнала рО с величинойуправляющего сигнала Ут., - , =Дз 1 п щгде А - коэффициент пропорциональности20 между величиной сигнала У, и величиной интервала введения 1 - 1 сигнала У.Уз 1 пИ, =У г=г25 Сигнал У, длительность которого 1 з - 1 зависит только от параметров двигателя и величины люфта з редукторе и, следовательно,является величиной постоянной для конкретной автоматической системы, обеспечиваетЗ 0 разгон двигателя с целью:форсированноговыбора люфта.ь2 (1 з -)с2 е =1+е35где Й - коэффициент усиления исполнительного двигателя.Из сформированных сигналов У, и 1l вцепь управления двитателя подают наиболь ший по длительности. Если танковым являетсясигнал Уз (интервал 1 - 11 на фиг. 1), что характерно для задающих воздействий с относительно небольшими амплитудами, то фактическая величина скорости двигателя рО в 45 момент снятия сигнала з будет превышатьзначение, соответствующее величине задающего сигнала У, Если не принять специальных мер, это приведет к большому перерегулированию в системе и в конечном итове к неустойчивости системы. Поэтому в момент Ьз в цепь управления подают согласующий тормозящий сигнал У, который приводит в соответствие величину скорости рО с величиной управляющего воздействия У (интервал 1, - 1 з на фиг. 1)У, = У, ( - з 1 п Уу) при (8, - 8,) ) (Ю, - М,)У,=О при (8, - У,) С(8, - 8,)Если же наибольшим по длительности ока зывается сигнал У (интервал Ь - 11 нафиг, 2), что характерно для относительно больших задающих воздействий, то согласование величины выходного сигнала рО с величиной управляющего воздействия У; произой дет только в момент снятия сигнала У Этоисключает введение тормозящего согласующего сигнала.При использовании предлагаемого способа управления существенно уменьшается зависимость времени выбора люфта от величины задающего воздействия, причем время выбора люфта значительно меньше, чем при использовании ранее известных способов. Форсированный выбор люфта при этом не приводит к чрезмерному перерегулированию в системе. Помимо этого, здесь нет необходимости использования производных от сигнала ошибочки и выходного сигнала, Таким образом, предложенный способ управления исполнительным двигателем позволяет, несмотря на наличие люфта в редукторе, получать автоматичесиие системы с высокой добротностью.Предлагаемый способ управления исполнительным двигателем может быть реализован различным образом. Например, для выработки сигнала У могут быть использованы самые разнообразные схемы отрицания разнозначности. Сигналы 4 и У могут быть реализованы, например, при помощи фантастронных схем, схем вычитания или сравнения напряжений (токов), сигнал Уз - при помощи различных спусковых схем.Предмет изобретенияСпособ управления исполнительным двигателем следящего привода с люфтом в механической передаче, заключающийся в подаче в цепь управления двигателем задающего сиг нала и сигнала для компенсации инерционности, отличающийся тем, что, с целью повышения точности и улучшения качества переходных процессов, в момент перехода скорости двигателя через нуль формируют два сигналас 15 один - ,пропорциональный по длительностивеличине задающего сигнала, другой - постоянной длительности, причем из этих сигналов в цепь управления двигателем подают наибольший по длительности, и если им ока зывается сигнал постоянной длительности, тосразу после его окончания подают сигнал обратной полярности (фазы), длительность которого определяется величиной задающегосигнала.Заказ 2948/13ЦНИИ Изд.78 Тираж 755 Подписноударстзеппого комитета Совета Министров СССРпо делам изобретений и открытий1 осква, Я, Раушская наб., д. 4/5пография, пр. Сапунова, 2
СмотретьЗаявка
1282583
Е. И. Хлыпало, А. С. Подвальных, И. В. Филатов, С. Н. Шаров
МПК / Метки
МПК: G05B 11/00, H02P 5/06
Метки: двигателем, исполнительным, люфтом, механической, привода, следящего
Опубликовано: 01.01.1973
Код ссылки
<a href="https://patents.su/4-389604-sposob-upravleniya-ispolnitelnym-dvigatelem-sledyashhego-privoda-s-lyuftom-v-mekhanicheskojj.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления исполнительным двигателем следящего привода с люфтом в механической</a>
Преобразователь дельта-модулированного сигнала в сигнал с импульсно-кодовой модуляцией

Номер патента: 1128385
Опубликовано: 07.12.1984
Авторы: Брунченко, Власюк, Охинченко
МПК: H03K 13/24
Метки: дельта-модулированного, импульсно-кодовой, модуляцией, сигнал, сигнала
...с шиной 3 синхронизации, выходы реверсивного счетчика 1 являются выходом 4 устрой ства, счетчик 5, первый и второй Р- триггеры 6 и 7, элемент 8 ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ, первый и второй логические блоки 9 и 10, причем шина 3 синхронизации соединена с входом счетчика 5 и входами синхронизации первого и второго 2 -триггеров 6 и 7, авыход старшего разряда реверсивногосчетчика 1 подключен к первому входупервого логического блока 9, к первому входу элемента 8 ИСКЛЮЧАЮЩЕЕИЛИ-НЕ и к входу первогоЮ -триггера6, выход которого соединен с вторымвходом элемента 8 ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ,выход которого подключен к входуустановки в "0" счетчика 5, а выходсчетчика 5 - к первому входу второгологического блока 10, выход которого соединен с 3 -входом второго...
Преобразователь дельта-модулированного сигнала в сигнал с импульсно-кодовой модуляцией

Номер патента: 1216831
Опубликовано: 07.03.1986
Авторы: Савельев, Строд, Хофмаркс
МПК: H03M 7/36
Метки: дельта-модулированного, импульсно-кодовой, модуляцией, сигнал, сигнала
...когда на первый вход анализатора 2 полярности поступает нулевая пачка импульсов при наличии высокого логического уровня на втором входе анализатора полярности), то сигналявляется инверсным по отношению к сигналу 3 . На втором выходе анализатора 2 полярности при этом присутствует высокий логический уровеньПоскольку в общем случае частоты дискретизации ДМ и ИКМ сигналов различны, то для формирования выходно 12168311, Преобразователь дельта-модулированного сигнала в сигнал с импульс но-кодовой модуляцией, содержащий реверсивный счетчик, блок управления и триггеры задержки, входы которых подключены к выходам соответствующих разрядов реверсивного счетчика, первый и второй входы которого соединены с соответствующими выходами блока...
Способ задержки поля телевизионного сигнала на время, равное длительности поля и кадра

Номер патента: 428573
Опубликовано: 15.05.1974
Авторы: Безруков, Московский, Наумов
МПК: H04N 5/00
Метки: время, длительности, задержки, кадра, поля, равное, сигнала, телевизионного
...в пространстве строк с одновремен,ным увеличением плотности тока луча, а при ".читываении коммутирующий луч нормально фоасусируют, вертикальный размер растра на мишени определенно изменяют прн записи и считывании лучом с нормальной фоыусировкой,На чертеже показана схема устройства,,реализующая предлагаемый,способ.Устройство работает следующим образом.1 о На блок записи 1,поступает последо)вательно:ть полей видеосигнала, чередующихся во времени чеоез два поля 1001001,00, пде 1 обозначает наличие сигнала, а О - его отсутствие. С выхода блока запион 1 снпнал по сту 1 пает на телевизионнуо камеру 2, которая вданном случае является запоминающии элементом устройства задержки. Блок упразления Л камерой осуществляет либо растягивапне апертуры...
Устройство для формирования сигнала эдс вентильного двигателя

Номер патента: 1300604
Опубликовано: 30.03.1987
Авторы: Кричевский, Эпштейн
МПК: H02K 29/00
Метки: вентильного, двигателя, сигнала, формирования, эдс
...образует первый входустройства для формирования сигналаЭДС вентильного двигателя, а входывторого масштабного преобраэовате"ля 2 и первого блока 4 дифференцирования соединены с выходом первогоинвертора 5, входом соединенного свыходом третьего масштабного преобразователя 3, вход которого образует второй вход устройства для формирования сигнала ЭДС вентильногодвигателя.В устройство для формирования сигнала ЭДС вентильного двигателя введены четвертый 7 и пятый 8 масштабные преобразователи, второй блок 9дифференцирования, второй инвертор10, второй сумматор 11. Первый сумматор 6 снабжен четвертым входом, который соединен с выходом второго блока 9 дифференцирования, вход которого подключен к выходу второго инвертора 10, входом соединенного с...
Преобразователь амплитуды сигнала в длительность импульса

Номер патента: 586553
Опубликовано: 30.12.1977
Авторы: Глиненко, Кедровский, Погрибной
МПК: H03K 3/66
Метки: амплитуды, длительность, импульса, сигнала
...130 1,111-т) Янзцст 011 5, врс)я зада оп)10 ц.586553 7 а1 Составитель А. Андриевский Тсхрсд Н, Рыбкина Корректор Е. Мохо Ко,п едакто Тирагк 1080ета,5 ппистровоткрытийсая наб., д. 4/5 Изд.1011осударствеппото комитета Спо дела.л изобретений13035, Москва, )К, бауш дписнос Заказ 2791 ПО агиография, пр. Сапгпов 3почку 6, включающую конденсатор 7 и резисб, источник 9 с 1 рооир)1 ощих пмильсив, ВыхОДНОи зажим 1 О Н 15 ВОО 1)азоватсл 51, ВхОДИОН зажим 11 преоо 1 азОВател 5 И,усгройство раоотает следую 1 цим образом.Ьходнои сигнал поступает на вход 11, что Влечет за сооои изменение Величины с 015 р 01 явления канала транзистора О,Однако до поступления с выхода источника 9 строоирующего импульса преооразовагель находится в ждущем состоянии, 1...
Предыдущий патент: Стабилизированный выпрямитель
Следующий патент: Устройство для управления тиристорами отсоса
Случайный патент: Устройство для нанесения клейких этикеток на предметы