Привод подач для станков с числовым программным управлением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
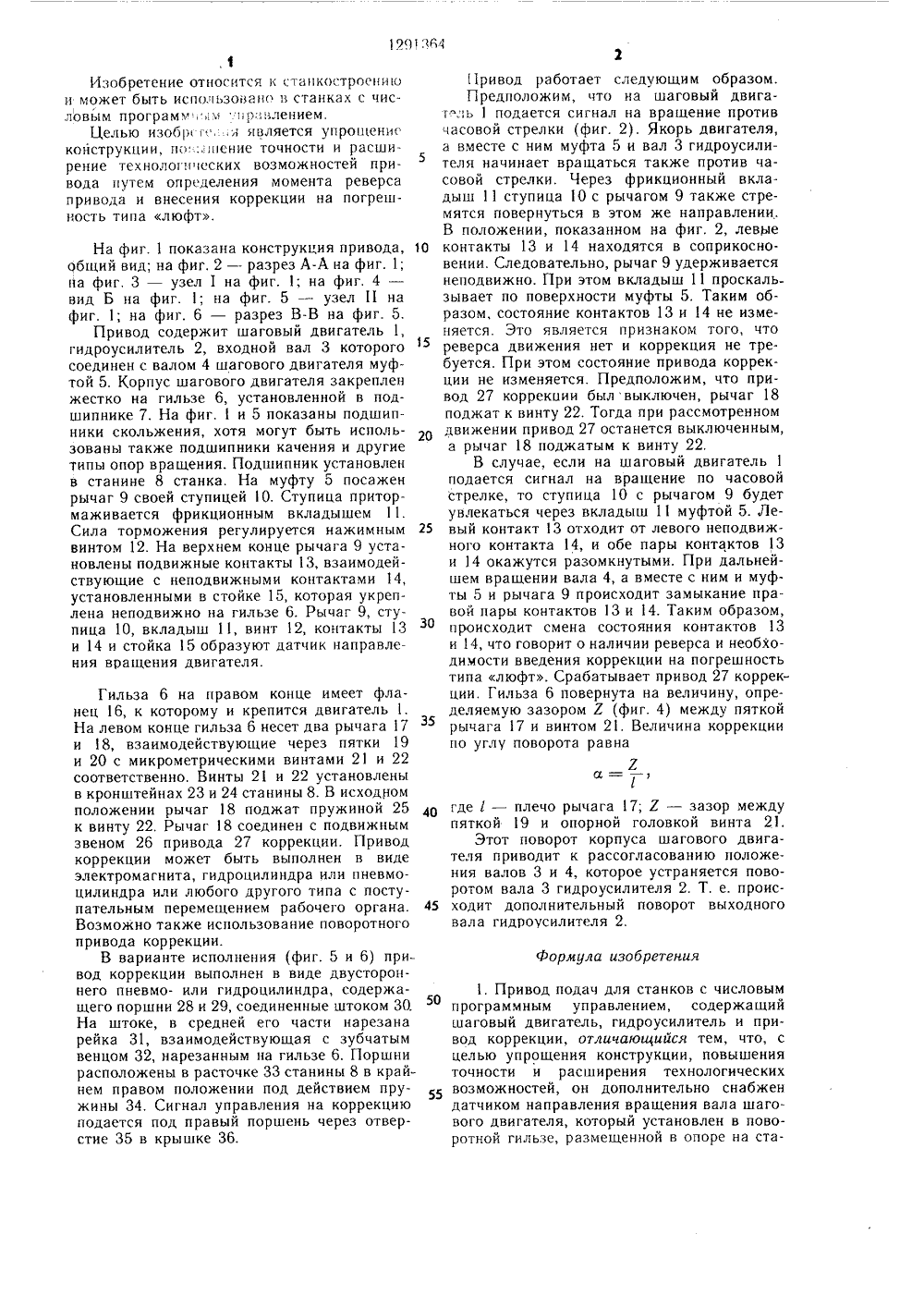
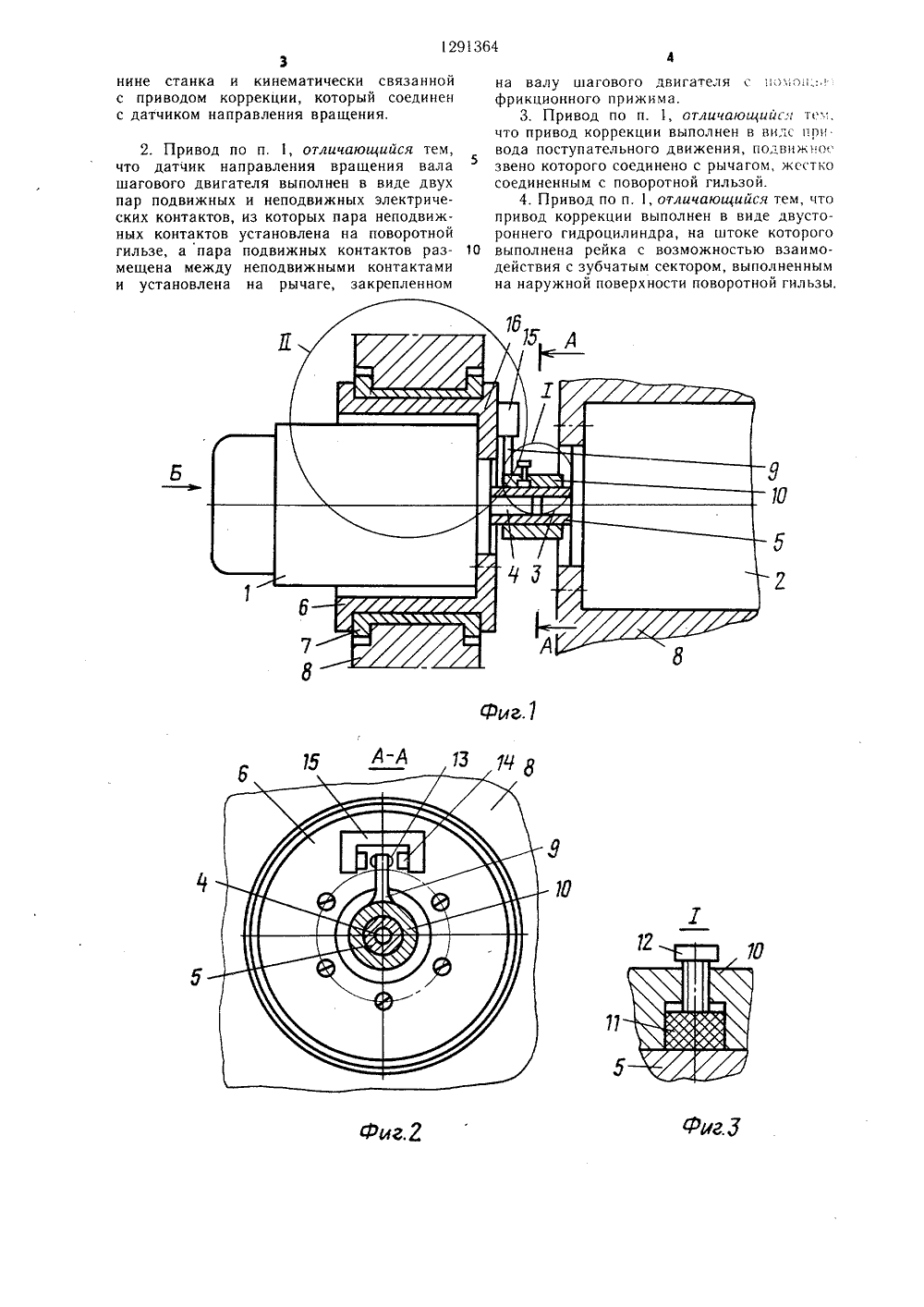
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК ЯО 129 Ш 4 В 23 Я 1 ОПИСАНИЕ ИЗОБРЕТЕН нстит фенди ние точ в с про нострое(54) ПРИ С ЧИСЛОВ ЛЕНИЕМ (57) Изобр нию, в част ков с числ Цель изобр повышение гических в анкостроедля станравлением. нструкции, е техноло- Привод етение относ ности к приво овым програм етения - упр точности и р озможностей тся к ст дам пода мным уп щение ко сширени привода ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(56) Ратмиров В. А. и др. Повышности и производительности станкграммным управлением. М.: Машние, 1970, с. 207. ВОД ПОДАЧ ДЛЯ СТАНКОВ ЫМ ПРОГРАММНЫМ УПРАВсодержит шаговый двигатель, гидроусилитель, привод коррекции и датчик направления вращения вала двигателя. Шаговый двигатель установлен в гильзе, размещенной в опоре с возможностью ее поворота приводом коррекции. Датчик направления вращения выполнен в виде двух пар контактов так, что неподвижные контакты размещены на гильзе, а подвижные - на рычаге, посаженном с возможностью поворота на валу шагового двигателя. Привод коррекции выполнен в виде привода поступательного перемещения, подвижное звено которого соединено с рычагом, жестко скрепленным с гильзой. Приводится вариант исполнения привода коррекции в виде двустороннего пневмоили гидроцилиндра, на штоке которого выполнена рейка, взаимодействующая с зубчатым сектором, установленным на наружной поверхности гильзы. 3 з. п. ф-лы, 6 ил, 291 364Гильза 6 на правом конце имеет фланец 16, к которому и крепится двигатель 1. На левом конце гильза 6 несет два рычага 17 и 18, взаимодействующие через пятки 19 и 20 с микрометрическими винтами 21 и 22 соответственно. Винты 21 и 22 установлены в кронштейнах 23 и 24 станины 8. В исходном положении рычаг 18 поджат пружиной 25 40 к винту 22, Рычаг 18 соединен с подвижным звеном 26 привода 27 коррекции. Привод коррекции может быть выполнен в виде электромагнита, гидроцилиндра или пневмоцилиндра или любого другого типа с поступательным перемещением рабочего органа. 45 Возможно также использование поворотного привода коррекции.В варианте исполнения (фиг. 5 и 6) привод коррекции выполнен в виде двустороннего пневмо- или гидроцилиндра, содержащего поршни 28 и 29, соединенные штоком 30. На штоке, в средней его части нарезана рейка 31, взаимодействующая с зубчатым венцом 32, нарезанным на гильзе 6. Поршни расположены в расточке 33 станины 8 в крайнем правом положении под действием пружины 34. Сигнал управления на коррекцию подается под правый поршень через отверстие 35 в крышке 36.,1Изобретение относится к станкостроению и может быть использовано в станках с числовым программ, а 1:и;лением.Целью изобр г,я является упрощение конструкции, по гпсние точности и расши. рение технолог,шеских возможностей привода путем определения момента реверса привода и внесения коррекции на погрешность типа люфт. На фиг. 1 показана конструкция привода, общий вид; на фиг, 2 - разрез А-А на фиг. 1; на фиг, 3 - узелна фиг. 1; на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - узел 11 на фиг, 1; на фиг, 6 - разрез В-В на фиг. 5.Привод содержит шаговый двигатель 1, гидроусилитель 2, входной вал 3 которого соединен с валом 4 шагового двигателя муфтой 5. Корпус шагового двигателя закреплен жестко на гильзе 6, установленной в подшипнике 7, На фиг. 1 и 5 показаны подшипники скольжения, хотя могут быть использованы также подшипники качения и другие типы опор вращения. Подшипник установлен в станине 8 станка, На муфту 5 посажен рычаг 9 своей ступицей 1 О. Ступица притормаживается фрикционным вкладышем 11. Сила торможения регулируется нажимным винтом 12. На верхнем конце рычага 9 установлены подвижные контакты 13, взаимодействующие с неподвижными контактами 14, установленными в стойке 15, которая укреплена неподвижно на гильзе 6. Рычаг 9, ступица 10, вкладыш 11, винт 12, контакты 13 и 14 и стойка 15 образуют датчик направления вращения двигателя. О 5 20 25 30 11 ривод работает следующим образом.Предположим, что на шаговый двигат-ль 1 подается сигнал на вращение против часовой стрелки (фиг. 2). Якорь двигателя, а вместе с ним муфта 5 и вал 3 гидроусилителя начинает вращаться также против часовой стрелки. Через фрикционный вкладыш 11 ступица 10 с рычагом 9 также стремятся повернуться в этом же направлении. В положении, показанном на фиг. 2, левые контакты 13 и 14 находятся в соприкосновении. Следовательно, рычаг 9 удерживается неподвижно. При этом вкладыш 11 проскаль зывает по поверхности муфты 5. Таким образом, состояние контактов 13 и 4 не изменяется. Это является признаком того, что реверса движения нет и коррекция не требуется. При этом состояние привода коррекции не изменяется. Предположим, что привод 27 коррекции был выключен, рычаг 18 поджат к винту 22. Тогда при рассмотренном движении привод 27 останется выключенным, а рычаг 18 поджатым к винту 22,В случае, если на шаговый двигатель 1 подается сигнал на вращение по часовой стрелке, то ступица 10 с рычагом 9 будет увлекаться через вкладыш 11 муфтой 5. Левый контакт 13 отходит от левого неподвижного контакта 14, и обе пары контактов 13 и 14 окажутся разомкнутыми. При дальнейшем вращении вала 4, а вместе с ним и муфты 5 и рычага 9 происходит замыкание правой пары контактов 13 и 14. Таким образом, происходит смена состояния контактов 13 и 4, что говорит о наличии реверса и необходимости введения коррекции на погрешность типа люфт. Срабатывает привод 27 коррекции. Гильза 6 повернута на величину, определяемую зазором Л (фиг. 4) между пяткой рычага 17 и винтом 21. Величина коррекции по углу поворота равнагде 1 - плечо рычага 17; Л - зазор между пяткой 19 и опорной головкой винта 21,Этот поворот корпуса шагового двигателя приводит к рассогласованию положения валов 3 и 4, которое устраняется поворотом вала 3 гидроусилителя 2, Т, е. происходит дополнительный поворот выходного вала гидроусилителя 2.Формула изобретения1, Привод подач для станков с числовым программным управлением, содержащий шаговый двигатель, гидроусилитель и привод коррекции, отличающийся тем, что, с целью упрощения конструкции, повышения точности и расширения технологических возможностей, он дополнительно снабжен датчиком направления вращения вала шагового двигателя, который установлен в поворотной гильзе, размещенной в опоре на ста 12913643нине станка и кинематически связаннойс приводом коррекции, который соединенс датчиком направления вращения. 2. Привод по п, 1, отличающийся тем, что датчик направления вращения вала шагового двигателя выполнен в виде двух пар подвижных и неподвижных электрических контактов, из которых пара неподвижных контактов установлена на поворотной гильзе, а пара подвижных контактов размещена между неподвижными контактами и установлена на рычаге, закрепленном на валу шагового двигателя с по 1;оп,:, фрикционного прижима.3. Привод по п. 1, стличающиис т";,что привод коррекции выполнен в виде при.вода поступательного движения, подвпжнн звено которого соединено с рычагом, жестко соединенным с поворотной гильзой.4, Привод по п. 1, отличающийся тем, чтопривод коррекции выполнен в виде двустороннего гидроцилиндра, на штоке которого 10 выполнена рейка с возможностью взаимодействия с зубчатым сектором, выполненным на наружной поверхности поворотной гильзы.,1 б Алексеенк с К ткрытий ктная, 4 по делам шская на ятие, г. Уж Составите гь В Техред И. Вере Тираж 787 ного комитета СССМосква, Ж - 35, Ра графическое предпр Редактор А. ШандорЗаказ 84/17ВНИИПИ Государстве113035,Производственно-пол орректор И. Муодписноезобретений и од. 4/5город, ул. Прое
СмотретьЗаявка
3962634, 03.10.1985
ПЕНЗЕНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ПЕРЕДРЕЙ ЮРИЙ МИХАЙЛОВИЧ, ЭФЕНДИЕВ АЛЕКСЕЙ МАМЕДОВИЧ
МПК / Метки
МПК: B23Q 15/00
Метки: подач, привод, программным, станков, управлением, числовым
Опубликовано: 23.02.1987
Код ссылки
<a href="https://patents.su/4-1291364-privod-podach-dlya-stankov-s-chislovym-programmnym-upravleniem.html" target="_blank" rel="follow" title="База патентов СССР">Привод подач для станков с числовым программным управлением</a>
Привод двигателя стирлинга двойного действия

Номер патента: 1268776
Опубликовано: 07.11.1986
Авторы: Александравичюс, Нарбутас
МПК: F02G 1/053
Метки: двигателя, двойного, действия, привод, стирлинга
...рамок 10, Для удержания от радиального перемещения составного наклонного диска 5 рамки 10 снабжены выступами 19,Привод двигателя Стирлинга двойного действия работает следующим образом.При давлении газа на поршень 12 сила давления передается штоку 11, рамке 10, валику 15 и через крайние тяги 13 сектору 9. Последний через подшипники 7 и 8 силу давления передает радиальным осям 3 и 4, а через подшипники 6 - валу 1.В то же время противоположный (по месту расположения) поршень выполняет вспомогательный процесс - вытесняет газ, Сила давления передается поршню следующим образом: когда верхний конец радиальной оси, например 3, опускается вниз, нижний ее конец поднимается вверх (фаза вытеснения газа), крутящий момент через вал 1, который...
Вспомогательный привод двигателя внутреннего сгорания для воздушного компрессора

Номер патента: 1709921
Опубликовано: 30.01.1992
Автор: Ханс
МПК: F02B 67/04
Метки: внутреннего, воздушного, вспомогательный, двигателя, компрессора, привод, сгорания
...3 с коленчатым валом 4,На коленчатом валу 4 компрессора установлено ведомое зубчатое колесо 5, причемось 6 вращения ведомого зубчатого колеса5 установлена с определенным смещением(эксцентриситетом) е относительно оси 7вращения коленчатого вала 4. Ведомое зубчатое колесо 5 входит в зацепление с промежуточным зубчатым колесом 8,установленным на распределительном валудвигателя внутреннего сгорания, Промежуточное зубчатое колесо 8 кинематическисвязано с ведущим зубчатым колесом, уста. новленным.на выходном валу двигателявнутреннего сгорания,Максимальный эксцентриситет е, представляющий собой расстояние между осямивращения 6 и 7, обеспечивается при положении поршня 2 в верхней мертвой точке,когда оси 6, 7 и ось вращения промежуточного...
Устройство задания режимов работы тиристорно-импульсного регулятора привода двигателя транспортного средства

Номер патента: 952666
Опубликовано: 23.08.1982
Автор: Калиниченко
МПК: B60L 15/20
Метки: двигателя, задания, привода, работы, регулятора, режимов, средства, тиристорно-импульсного, транспортного
...импульсы на выходе И 9, которые далее следуют на вычитающий вход реверсивного счетчика системы управления (не показан),приводя к возврату йозиций и к умейьшению значения тока двигателя.По мере увеличения значения разностной частоты происходит изменение интенсивности набора или возврата позиций, ток в тяговом двигателе при этом в процессе пуска поддерживается по характеристике, обозначенной ли" нией О фиг.2).Таким образом, выполняя устройство в соответствии с описанием предоставляется возможность улучшить использование сцепного веса электро- транспортной единицы, обеспечив при этом плавное регулирование тока двигателя с учетом ограничений по сцеплению колеса с рельсом. Формула изобретения Устройство задания режимов работы...
Устройство для вращения гильз подающего аппарата пильгерстанов

Номер патента: 188458
Опубликовано: 01.01.1966
МПК: B21B 21/06
Метки: аппарата, вращения, гильз, пильгерстанов, подающего
...потерь на трение между шипами гайки и пазами дрели увеличивается нагрузка на детали механизма.Предлагаемое устройство отличается тем, 10 что дрельная гайка выполнена в виде однорядной шариковой обоймы и снабжена винтами для регулировки шаров, что обеспечивает возможность применения дрели с переменным шагом нарезки, а также вследствие 15 замены трения скольжения трением качения уменьшается нагрузка на детали механизма.На чертеже схематично изображено предлагаемое устройство в поперечном разрезе.Обойму 1 с пазами надевают на дрель 2, 20 шаг которой равен ширине пазов. В пазы вставляют шары 3, к которым винтами 4 прижимаются вкладыши б со сферической расточкой. На обойму надевается храповое колесо б.Пазы на дрелгл выполнены по прямой...
Кулачок для привода клапана двигателя внутреннего сгорания с регулируемым механизмом газораспределения

Номер патента: 1738096
Опубликовано: 30.05.1992
Автор: Золотов
МПК: F01L 1/08
Метки: внутреннего, газораспределения, двигателя, клапана, кулачок, механизмом, привода, регулируемым, сгорания
...и рабочую поверх. ность с переменным по длине профилем,рабочая поверхность выполнена коноиднойсо смещенной центральной осью,На фиг. 1 показан кулачок, общий вид;на фиг. 2 - то же, вид сбоку,Кулачок для привода клапана механизма газораспределения ДВС с переменнымифазами и ходом клапанов, изменяемыми взависимости от оборотов двигателя, содержит затылочную цилиндрическую поверхность 1 и рабочую поверхность 2 с переменнымпо длине профилем 3, выполненным в видеконоида со смещенной центральной осью, какпоказано на фиг.2. В результате такого смещения получены линии в - с и а - с сопряжения цилиндрической и коноиднойповерхностей, Точки а и в, с и с характеризуют начало и конец открытия или закрытияклапанов через сферические толкатели...
Предыдущий патент: Станок фрезерный
Следующий патент: Устройство для изменения положения изделия
Случайный патент: Способ изготовления полирующего элемента