Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
Оп ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ744433 Союз Советски вСоцналистичвскивРеспубликвв девам иеабретеиий н огерытий(54) СЛЕДЯ 1 ЦАЯ СИСТЕМА Ф1Изобретение относится к системам автоматического регулирования, осуществляющим замедление при приближении к границе перемещения, н может быть использована в устройствах автоматики для отработки с максимальной ско. ростью и минимальным временем переходного процесса скачкообразных рассогласований, например в устройствах изменения увеличения оптических систем, в приводах наведения оптических, телевизионных и других устройств, в механизмах протяжки, считывания, печати итд.Известны следящие системы, в которых для улучшения динамических свойств используется, наряду с исполнительным двигателем (блоком муфт), дополнительная тормозная муфта, пред. назначенная для гашения запасенной кинетичес. кой энергии механизма и исполнительного двигателя в момент отсутствия управляющего напряжения на входе усилителя системы 11.Однако эти системы достаточно громоздки и аппаратурно сложны из.за наличия самих тормозных муфт и дополнительных усилителей для их управления, Кроме того, дополнительное по 2требление энергии тормозными муфтами делаетэти системы неэкономичными,Наиболее близкой по технической сущностик предлагаемой является. следящая система,содержащая последовательно соединенные усили 5тель, двигатель, тахогенератор, делитель напряжения и первый сумматор, а также пороговыйблок и ключ, ситнальный вход которого соединен с выходом тахогенератора (2.0В этой системе в процессе отработки заданного рассогласования в момент равенства напря.жений сигнала рассогласования (первый входусилителя) и сигнала скоростной обработки связи, снимающегося с тахогенератора и подающекося через делитель напряжения на второй входусилителя, двигатель системы обесточен и система продолжает движение по инерции. Однаков следующий момент, так как система все жепродолжает двигаться к точке обработки, сигналрассогласования становится уже меньше сигналаотрицательной обратной связи, и с выхода уси.лителя на двигатель начинает поступать управляющее напряжение противоположной полярности(фазы), величина которого прямо пропорци.;ь 3 7ональна разности сигналов рассогласования иотрицательной обратной связи, Пропорционально выходному сигналу усилителя исполнительный двигатель развивает момент, препятствуюдальнейшему движению системы По инерции,В момент достижения системой согласованногоположения, т.е. прн нулевом сйгнале рассоглаЖвания, на вход усилителя через делитель на" пряжения приходит только сигнал отрицательной.обратной связи, двигатель развивает тормозящиймомент, система тормозится, и величина сигналаотрицательной обратной связи уменыпается. После прохождения системой согласованного положенил, сйгнал рассогласования меняет знак (фа.зу), в результате чего на первом и второмвходах усилителя действуют сигналы одинаковой полярности (фазы), один из которых -сигнал рассогласования - увеличивается по мере движения системы по ийерции, а другой -сигнал отрицательной обратной связи - убывает по мере убывания скорости системы, Придостижении системой определенной минимальной скорости с выхода тахогенератора снимается напряжение, абсолютная величина которогостловится меньше установпенного уровня срябатывания порогового блока, в результате чегопороговый блок срабатывает и переводит в рабочеесостоянне генератор импульсов. Импульсное напряжение сгенератора открыВает клточ,и сигнал-непосредственно с выхода тахогенератораччврез ключ, блок памяти и масщтабныйблок, подается на третий вход суммирутайегоуСилителя. Двигатель остапвливется, ейстемапод действием сигнала, образовавшегдся в результате перехода з границу здзиного-перемещейия, реверсируется и на малой скоростйподходит к точке отработки (границе цереме-.щения) с противоположной. первоначальномудвижейию стороны, после чего двигатель оста.ивливается,Недостатком известной системы является то,чу она замыкаетса цо скорости только вблизимаксимуМа первого перерегулирования, что при.водит к дополнительному пробегу механизма(появление рассогласования с противоположнойстороны границы перемещения) и потере времени на его ликвидацию,Цель йэобретения - повышение быстродей.ствия системы, т,е, выход на рабочий режими остановка системы в точке отработки должныпроисходить за минимальное время и без выбега механизма,Для достижения этой цели в следящую систему дополнительно введен второй сумматор,первый вход которого соединен с выходомпервого сумматора и входом порогового бло: ка, а второй вход соединен с выходом ключа,выход второго сумматора соединен с входомусилителя, вход порогового блока соединен свыходом первого сумматора, а выход - с уп.равляющим входом ключа.На чертеже приведена блок. схема предлагаемой следящей системы.Система содержит усилитель 1, двигатель 2, тахогенератор 3, делитель 4 напряжения, пер. вый сумматор 5, пороговый блок 6, ключ 7,; Система работает следующим образом.В согласованном состоянии ключ 7 открыт,сигнал с выхода тахогенератора 3 через ключ 7 и второй сумматор 8 подается на вход усилителя 1 (система замкнута по скорости), двигатель 2 обесточен и система неподвижна.Прн подаче на первый вход первого сумматора 5 сигнала рассогласования с выхода этого сумматора снимается напряжение, величина ко. торого превышает уровень срабатывания порогового блока 6. В результате срабатывания порогового блока 6 ключ 7 закрывается, и цепь -выход тахогенератора 3 - второй вход второго сумматора 8 прерывается. Одновременно сэтим сигнал с выхода первого сумматора 5 че. рез второй сумматор 8 поступает на вход усилителя 1, в результате чего на делитель 2 подается управляющее напряжение соответству. килей полярности (фазы), под действием которого двигатель 2 приходит во вращение и ведет систему в направлении уменьшения сигнала рассогласования. С выхода тахогенератора 3 через делитель напряжения 4 на второй вход первого сумматора 5 подается часть напряжения скоростной отрицательной обратной связи, величина которого значительно меньше сигнала рассогласования, в результате чего на вход усилителя 1 через второй сумматор 8 подается уменьшенное на величину сигнала обратной связи напряжение рассогласования, и двигатель 2 ведет систему к согласованному положению с максимальной скоростьюПо мере обработки системой заданного рассогласования величина сигнала на первом входе первого сумматора 5 уменьшается, а величина сигнала обратной связи остается постоянной, так как скорость двигателя максимальна, до того момента, когда сигнал рассогласования становится равным по величине сигналу обратной связи, В этот момент с выхода первого роговый блок 6 выключается, ключ 7 открыв.ется, и на второй вход второго сумматора 8подается выходное напряжение тахогенератора3 (система замыкается по скорости). На входусилителя 1 с выхода сумматора 8 подаетсянапряжение, величина и полярность которогоопределяются напряжением скоростной отрицательной обратной связи. Двигатель 2 оказываетавитель Г. Нефедовред Р. Олиян рректор Г, Назаров Редактор Л. Веселовская аз 3786/9 ЦНИИПИ по дел 113035, Мсно митета Срытий наб д. 4/5 Филиал ППП "Патент", г. Ужгород, ул. Проектная,5 74443 ся противовключенным н развивает. максимальный момент, препятствующий дальнейшему движению механизма. Кинетическая энергия механизма и двигателя гасится протнвовключенным двигателем, напряжение с тахогенератора 3 умень 5 шается, сигнал рассогласования также уменьшается, поскольку система еще продолжает двигаться в сторону согласования с уменьшающейся скоростью и плавно подходит к точке отработки.Таким. образом противовключение двигателя осуществляется не в то время, когда скорость двигателя близка к нулю, как в известной си стеме, а значительно раньше, еще до подхода системы к согласованному положению в. момент равенства сигналов рассогласования и отрнца тельной обратной связи, в результате чего исполнительный двигатель в процессе отработки всегда находится под воздействием управляющего напряжения, чем и достигается более эффективное торможение системы. При этом времяро переходного процесса сокращается на 30 - 40% по сравнению с известной системой,Путем оптимального выбора коэффициентов передачи делителя напряжения, роль которого может выполнять корректирующий контур и 2 Б ключа, а также уровня срабатывания порогового блока, в качестве которого могут быть использованы либо нуль-орган, либо пороговое реле, можно достичь плавной остановки механизма в заданном положении при отработке . 3 О 3 6системой рассогласования с максимальной скоростью, что имеет большое значение в механизмах дисмщионной смены увеличения оптическихи телевизионных систем, в системах приема иоперативного хранения указаний по углу, в механизмах протяжки, считывания и печати. Формула изобретения Следящая система, содержащая пороговый блок и ключ, сигнвльный вход которого подключен к выходу тахогенератора, и последова тельно соединенные усилитель, двигамль, тахо- генератор, делитель напряжения и первьщ сум матор, о т л и ч а ю щ а я с я тем, что, с целью повышениябыстродействия, в него вве. ден второй сумматор, первый и второй входы которого соответственно соединены с выходом первого сумматора и выходом ключа, а выход соединен с входом усилителя, вход порогового блока соединен свыходомнервого сумматора, а выход . - с управляющим входом ключа.Источники информации,принятые во внимание при экспертизе 1. Хлыпало Е. И. Нелинейные системы автоматического регулирования, М., "Энергия", 1967, с, 380.2. Авторское свидетельство СССР Мф 566234, кл. 6 06 В 6/02, 1975 (прототип).,
СмотретьЗаявка
2593040, 22.03.1978
ПРЕДПРИЯТИЕ ПЯ А-1705
АНДРЕЕВА НАТАЛИЯ ИВАНОВНА, ГУНЧЕНКОВ ВСЕВОЛОД ИВАНОВИЧ, ЖАМОВ ВАЛЕНТИН АНАТОЛЬЕВИЧ, ИВАНОВ ВЛАДИМИР ДМИТРИЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: следящая
Опубликовано: 30.06.1980
Код ссылки
<a href="https://patents.su/3-744433-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Следящий привод для системы охлаждения двигателя зерноуборочного комбайна

Номер патента: 552041
Опубликовано: 30.03.1977
МПК: A01D 41/02
Метки: двигателя, зерноуборочного, комбайна, охлаждения, привод, системы, следящий
...поверхность 16 воздухозаборника 3 проникает в его полость и далее через окно 17 вентиля 5 10 15 20 25 30 35 40 45 50 тором 18 всасывается в полость радиатора 19, Подвижная стенка 12 - днище корпуса воздухозаборннка 3 - под действием силы тяжести находится в крайнем положении и, воздействуя на распределитель 2, удеряивает его золотник в положении, связывающем полость 11 гидроцилиндра 1 с каналом слива 20. В этом случае поршень 21 указанного гидроцилиндра действием пружины 22 удерживается в верхнем крайнем положении, а связанный с его штоком 4 поворотный клапан 5 - в открытом положении.1 огда, но мере засорения фнльтрующей поверхности 16 воздухозаборннка 3, давление в его полости упадет до заданного предела, поворотное днище...
Система высокочастотных каналов связи и телемеханики

Номер патента: 1378070
Опубликовано: 28.02.1988
Авторы: Данич, Долотов, Израилев, Мартиросов, Чирков
МПК: H04B 3/54
Метки: высокочастотных, каналов, связи, телемеханики
...в котором осуществляется 70 6Фазовая и амплитудная демодуляцияпринятого сигнала несущей частоты(Аиг.З ж), который далее поступаетчерез четвертый выход 47,102 приемника 17,70 на первый вход декодера2,55, а через третий выход 46,101приемника 17,70 на второй вход декодера 2,55. С третьего выхода второгодемодулятора 23,76 выпрямленный сигнал несущей частоты поступает науправляющий вход усилителя 19,72с регулируемым коэффициентом усиления.С выхода декодера 2,55 сигналызанятия, отбоя, набора номера поступают в блок 3,56 автоматическогосоединения абонентов, в котором осуществляются все необходимые соединения,С третьего выхода 46,101 приемника17,70 выделенный сигнал Аазовойманипуляции поступает на второй входкоммутатора 27,82 полярности, на...
Система управления двигателем внутреннего сгорания
Номер патента: 1687861
Опубликовано: 30.10.1991
Авторы: Балабин, Васильев, Евстифеев, Семин, Соин
МПК: F04B 41/04
Метки: внутреннего, двигателем, сгорания
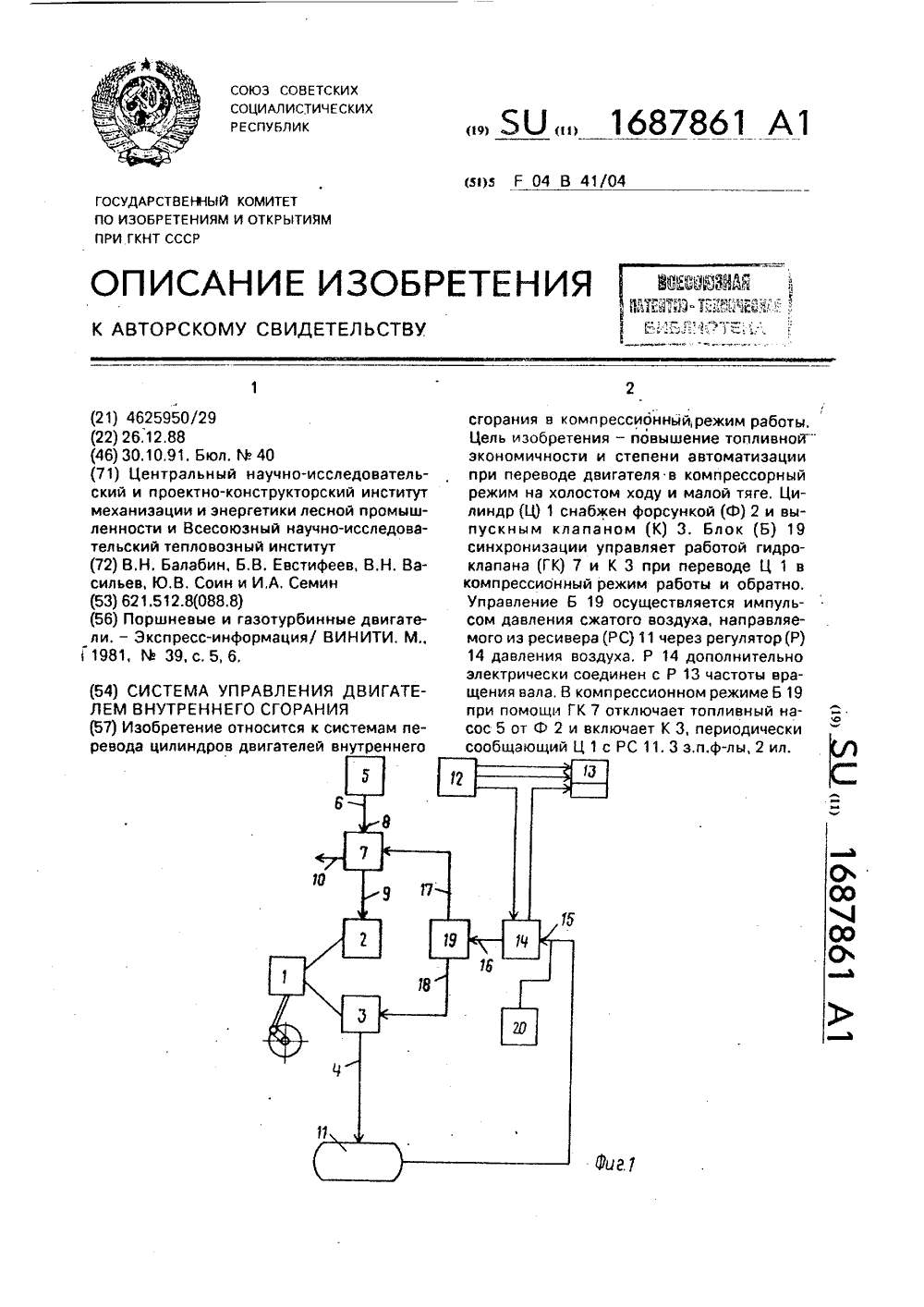
...питание, вследствие чего замыкаются контакты 43 и 44, Одновременно контакт 39 реле 36 давления подготавливает включение двух- позиционного золотника 32 блока 20 ручного управления. При этом выход б топливного насоса 5 через вход 8 и выход 9 гидроклапаиа 7 соединен с форсуикой 2 в цилиндре 1. Двигатель запускается, после чего включается реле 35,цзвления масла в системе 34 смазки и замыкается контакт 42, подготавливая включение двухпозиционного золотника 22 регулятора 14.При переводе цилиндра 1 в компрессорный режим по,цачи воздуха через выход 4 выпускного клапана 3 в ресивер 11 выполняют подкачку воздуха пиевмонасосом 28 через обратный клапан 29 в пневмокамеру 30, Контролируя давление по манометру 31, включают выключатель 47, поток...
Устройство для контроля системы передачи данных с обратной связью

Номер патента: 708393
Опубликовано: 05.01.1980
МПК: G08C 25/02
Метки: данных, обратной, передачи, связью, системы
...1 подается сигнал пуска автоматического сеанса сВязи, ПО этому сигналу датчик 1 формирует сообщение или служебную команду, состоящую из служебной информации спутника и информации адресата, и передает его в анализатбр 18. Анализатор 18 осуществляет анализ спутниковой части информации, Выделяет команду, содержащуюся в ней, и перецает ее на регистр 22Эта команда отображается блоком сигнализации 22, Регистр 21 управляет, кроме того, работой датчика ответных последовательностей 23 и датчика информации адресата 24. По концу информации спутника анализатор 18 осуществляет запуск датчика. информации адресата 24, при этом работа анализатора 18 и датчика 24 синхронизируется первым блоком фазиронания 19, Сумматор 14 осуществляет сложение сигналов,...
Устройство обратной связи для системы автоматического управления процессом электроискровой обработки

Номер патента: 598024
Опубликовано: 15.03.1978
МПК: G05B 19/02
Метки: обратной, процессом, связи, системы, электроискровой
...элементов 1 и .2, причем у последйого более низкий порог срабатывания, Входи пороговых зпементОВ подключены парадцельно зпектроискровому промежутку, а выходы - соответственно к инверторам 3 и 4,которые работают на схемы задержки 5 и 8, 5выходы которых подключены к двухвходовымлогическим элементам И-НЕ 7 и 8 соотвефственно через инверторы 9 и 1 О.другие,ахопц элементов 7 и 8 подкаочены к вь 1 ходнь 1 м шинам триггера 11, а выходцды элементов 7 и 8 через двухвходовой логический элемент. И-НЕ 12 подключеиы кОдноиу из входов триггера.На вход ипвертера 13 поступает Опорнаяпоспедоватепь)юсть импупьсовв Элемент задержки 14,. инверторы 15, 16, 17 и конденсатор 21 образуют схему формирования корофких импульсов, поступщощих на другой...
Предыдущий патент: Следящая система
Следующий патент: Следящая система
Случайный патент: Устройство для накатки кольцевых канавок на трубке