Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
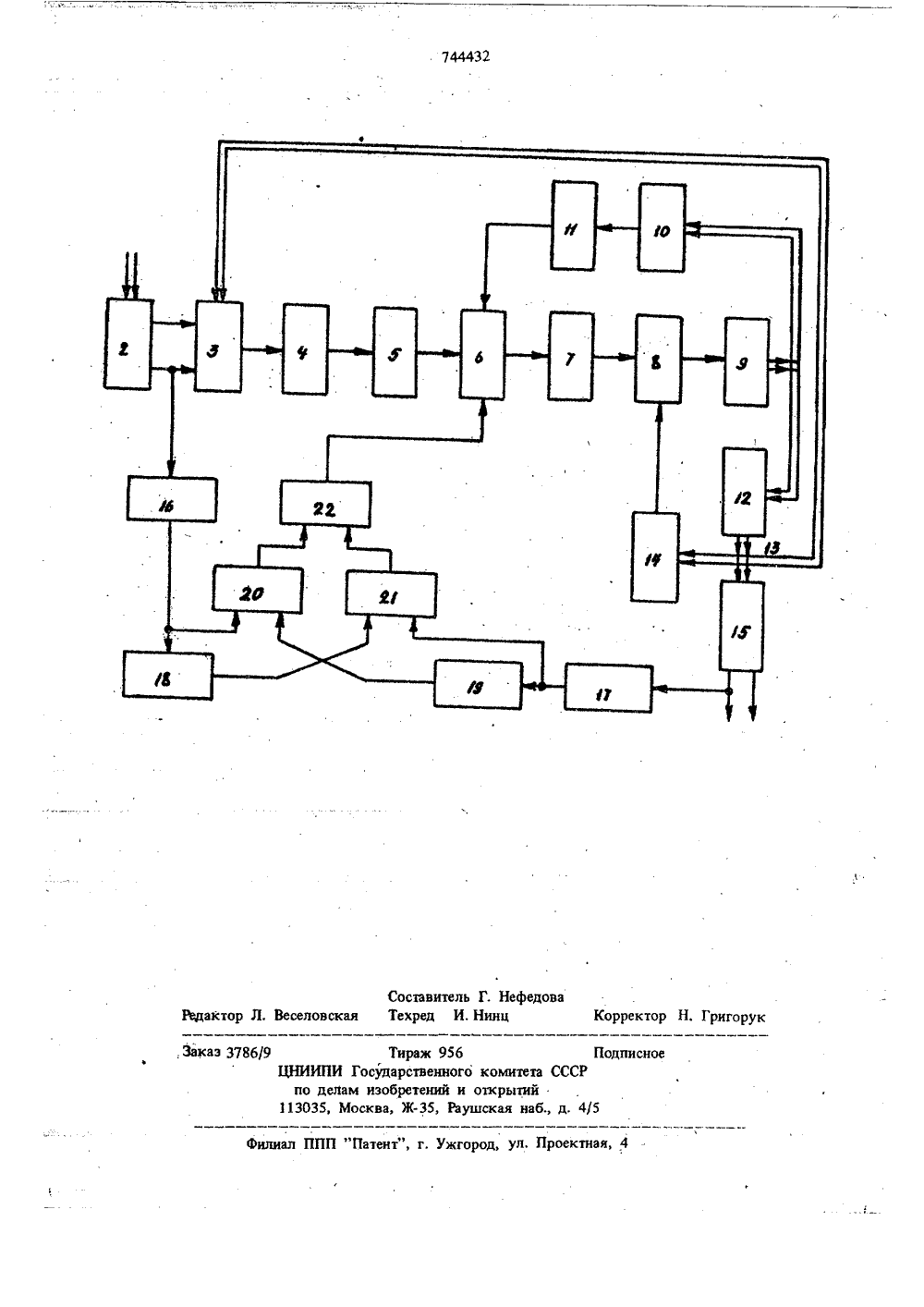
Опубликовано 30,06.80. Бюллетень М 24 ао делам нзобретеннй н открытийДата опубликования описания 30,06.80,и может быть использовано в устройствах автоматики и вычислительной техники, например всистемах синхронной связи переменного токас ограниченным углом поворота исполнительного вала и нерегулярным обновлением информа.ции об утловых положениях входного вала си.стемы.Известны следящие системы переменноготока с ограниченным углом поворота выходного вала, в которых прн входе входного вала в запретную зону исполнительный двигательобесточивается и выходной вал останавливаетсяна границе запретной зоны 1,В таких системах при независимом враще.,нии входного вала и нерегулярном электрическом подключении к исполнительной системекомандного датчика, механически сопряженногос входным валом, в момент принятия системойуказания по углу исполнительный двигатель си.стемы ведет выходной вал в заданное положе.ние кратчайшим путем как через рабочую зону,так и через зону запрета, в зависимости от фазы разностного сигнала на входе усилителя. 2В случае движения выходного вала в сторону запретной зоны при достижении им предельного положения срабатывает концевой выключа. тель, двигатель обесточивается, выходной вал системы останавливается на границе рабочей зоны, и система не может отработать заданного утла беэ вмешательства оператора, который известнымн средствами приводит систему в согласованное положение,тоНаиболее близкой по технической сущностик предлагаемой, является система, содержащаясинусно-косинусные вращающиеся трансформа.торы - датчик и приемник, первый и второй.15усилители, первый детектор, сумматор, модуля.тор, двигатель, тахогенератор, корректирующеезвено, редуктор, блок концевых выключателей. и выходной сннусно косинусный вращающийсятрансформатор - датчик угла поворота выходного вала системы. (2.Однако известная система имеет низкоебыстродействие.Цель изобретения - повышение быстродействия системы,7444323Поставленная цель достигается тем, что в систему введены второй и третий детекторы, два инвертора, два элемента И и третий уснли тель, ко входам которого подключены выходы элементов И, первый и вторые входы которых подсоединены соответственно ко входу и выхо. ду первого и второго инверторов, входы которых через второй и третий детекторы подклю. чены соответственно ко входу приемника и вы, ходу датчика угла поворота выходного вала си стемы, а выход третьего усилителя соединен с третьим входом сумматора.На чертеже представлена блок. схема системы,Система содержит входной вал 1, датчик 2,приемник 3, первый усилитель 4, первый детектор 5, сумматор 6, модулятор 7, второй усилитель 8, исполнительный двигатель 9, тахогенератор 10, корректирующее звено 11, редуктор12, выходной вал 13 системы, блок 14 концевых выключателей, датчик 15 угла поворотавыходного вала системы, второй и третий детек.торы 16, 17, первый и второй инверторы 18,19, первый 20 и второй 21 элементы И, третий усилитель 22.В процессе синхронного слежения в рабочей зоне система работает обычно, то есть при вращении входного вала 1 против часовой стрелкираэностный сигнал на выходе приемника 3 на.ходится в противофазе с опорным, с выходадетектора 5 снимается отрицательный сигнали подается на первый вход Сумматора 6, навторой вход которого подается сигнал отрицательной обратной связи с выхода корректиру.ющего звена 11. С выхода датчика на вход мо.дулятора 7 также приходит уменьшенный навеличину сигнала отрицательной обратной свя.зи отрицательный сигнал, и исполнительный . двигатель 9 ведет вйходной вал 13 против часовой стрелки, а при вращении входного вала1 по часовой стрелке разностный сигнал с вы 4,хода приемника 3 совпадает по фазе с опорным,с выхода детектора 5 снимается положительныйсигнал, с выхода сумматора 6 на вход модуля.тора 7 приходит положитедьный сигнал, и двигатель 9 ведет выходной вал 13 по часовой45 стрелке. Если в момент принятия указания по углу, т,е. в момент электрического включения датчика 2 (или приемника 3), выходной вал 13 находится вблизи правой границы рабочей зоны (в третьей четверти окружности), входной вал 1 - вблизи левой. границы этой зоны (во второй четверти окружности), при этом запретная зона 2 у расположена симметрично во второй и третий четвертях окружности (тт + у), а на.55 пряжение, снимаемое с синусного выхода датчика 2,совпадает по фазе с опорным, анапря жение, снимаемое с синусного выхода выход. аного датчика 15, находится в противофазе с опорным, то с выхода детектора 16 снимается сигнал положительной полярности, так как синус угла в первой и второй четвертях положителен, а с выхода детектора 17 снимается отри. цательный сигнал, так как синус угла в третьей и четвертой четвертях имеет отрицательное значение. Положительный сигнал с выхода детектора 16 подается на первый вход первого элемен. та 20 И и через ннвертор 18, уже отрицатель. ной полярности, - на первый вход второго элемента 21 И. Отрицательный сигнал с выхода детектора 17 подается на второй вход элемента 21 И и через инвертор 19 уже положительной полярности - на второй вход первого элеМента 20 И. Так как элементы 20, 21 И срабатывают только при совпадении положительных сигналов, то на неинвертнрующем входе усилителя 22 появляется отрицательный сигнал с выхода элемента 20 И, поскольку на первом и втором входах этого элемента присутствуют положительные сигналы. С выхода усилителя 22 отрицательный сигнал подается на третий вход сумматора 6 и, так как этот сигнал выбран большим на величину сигнала насыщения усилйтеля 8 (с учетом сигнала отрицательной обратной связи), чем максимально возможный сигнал с выхода детектора 5, то с выхода сумматора 6 на вход модулятора 7 также подается отрицательное напряжение, под действием которого двигатель 9 начинает вращаться с максимальной скоростью против часовой стрелки и ведет выходной вал 13 на кратчайшим путем через запретную зону, а через рабочую зону.При достижении выходным валом 13 близкого к нулю положения сигнал с детектора 17 становится настолько малым, что элемент 20 И устанавливается в исходное состояние, в результате чего поступление отрицательного сигнала с выхода усилителя 22 на третий вход сумматора 6 прекращается. Однако в этом положении выходного вала 13 управляющий разностный сигнал с выхода приемника 3 уже находится в противофазе с опорным, так как величина оставшегося неотработанного угла меньше т по крайней мере на величину угла 7 псловннной зоны запрета, даже в случае, если входной вал установлен на границе рабочей зоны.Таким образом, достигнув нулевого положения, система начинает управляться разностным сигналом с выхода приемника 3, который оп. ределяет поступление с выхода детектора 5 на первый вход сумматора 6 отрицательного напряжения, и двигатель 9 продолжает вести выходной вал 13 с прежней скоростью против часо. вой стрелки, т.е. в сторону согласованного с входным валом положения,После прохода выходным валом 13 нулевого положения и входа его в первую четверть32 6ний управлениедвигателем осуществляется сигналом рассогласования системы.После отработки выходным валом 13 задан. ного угла датчик 2 может быть отключен и система, которая замкнута по скорости выходного вала с помощью тахогенсратора О и кор./ректирующего звена 11, переходит в режим запоминання принятого угла. Кроме того, предлагаемая система может управляться оператором с помощью не показанного на схеме датчика командвыход которого может быть вклю. чен в усилительно-приобразовательный тракт системы, а к датчику 15 подключается вход силового привода или регулируемый объект.Применение предлагаемой системы исключает необходимость участия, оператора в режимах включения и приема указаний по углу.Формула изобретения Следящая система, содержащая последовательно соединенные датчик, приемник, йервыйусилитель, первый детектор, сумматор, модулятор, второй усилитель, исполнительный двигатель, вал которого через тахогенератор и корректирующее звено соединен со вторым вхо 1 омсумматора, и через редуктор с выходным валомсистемы, вторым входом приемника, датчикомугла поворота выходного вала системы и блоком концевых выключателей, выход которогосоединен со вторым входом второго усилителя,о т л и ч а ю щ а я с я тем, что, с целиоповышения быстродействия, в нее введены второй и третий детекторы, вда инвертора, дваэлемента И и третий усилитель, ко входам которого подключены выходы элементов Р 1, пер-вые и вторые входы которых подсоединены со.ответственно ко входу и выходу первого и второго инверторов, входы которых через второйи третий детекторы подключены соответственнок входу приемника и выходу датчика угла поворота выходного вала системы, а выход третьего усилителя соединен с третьим входом сумматора,Источники информации,принятые во внимание при экспертизе 1, Авторское свидетельство СССР М 304551,кл, 6 05 В 11/14, 3.04.70. 2. Авторское свидетельство СССР по заявке Нф,2414310/18-24, кл. 6 05 В 11/01, 1977.7444 окружноли на ыхоле цстектора 17 появляется сигнал положительной полярности, так как синус в первой четверти имеет положительное значенис, ни один из элементов 20,21 И не срабатывает из-за несовпадения положительных сигналов на их входах, и двигатель 9 Управляется сигналом рассогласования, снимаемым с выхода 5 приемника 3, до полной отработки скомандован-. ного угла. Если система принимает указание по углу в тот момент, когда выходной вал 13 находится во второй четверги, а выходной вал 1 в третьей, то с выхода, детектора 16 снимается сигнал отрицательной полярности и через инвертор 18 (положительный) подается на первый вход второго элемента 21 И, с. выхода детектора 17 снимается положительный сигнал . и подается на второй вход второго элемента 21 И Совпадение двух положительных сигналов на входах переводит элемент 21 И из исходного в рабочее состояние, в результате чего на инвертируюшем входе усилителя 22 появляго ется отрицагельное напряжение. С выхода усилителя 22 положительное напряжение подается на третий вход сумматора 6 и под его воздействием двигатель 9 врашает выходной вал 13 по часовой стрелке, ведя его из второй черезг 5 первую и четвертую четверти в третью, т.е. система идет не кратчайшим путем через зону запрета, а через рабочую зону.Если в момент принятия указания по углу входной и выходной валы находятся в одной30 четверти окружности и с детекторов 16, 17 снимаются сигналы одинаковой полярности, так как фазы напряжений, снимаемых с синусных выходов датчиков 2, 15 совпадают и знаки синусов углов одинаковы, то на входах элементов 20, 21 И нет совпадения положительных сигна 35 лов, элементы остаются в исходном состоянии, третий вход сумматора 6 обесточивается н дви. гатель 9 управляется разностным сигналом сприемника 3.Таким образом, в предлагаемой .системе за счет введения дополнительных элементов в случае несовпадения фаз напряжений с синусных выходов входного и выходного датчиков срабатывает соответствующий элемент И, и испол нительный двига тель управляется сигналом, снимаемым с выхода введенного усилителя, а в случае совпадения фаз указанных напряже744432 Составитель Г. Нефедоватор Л. Веселовская Техред И. Нипц Корректор Н. Григорук 56 Подписноенного комитета СССРнии и открытийРаушская наб д, 4/5 3786/9 Тираж ЦНИИПИ Государств по делам изобрете 113035, Москва, Ж
СмотретьЗаявка
2591266, 20.03.1978
ПРЕДПРИЯТИЕ ПЯ А-1705
АНДРЕЕВА НАТАЛИЯ ИВАНОВНА, ГУНЧЕНКОВ ВСЕВОЛОД ИВАНОВИЧ, ЖАМОВ ВАЛЕНТИН АНАТОЛЬЕВИЧ, ИВАНОВ ВЛАДИМИР ДМИТРИЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: следящая
Опубликовано: 30.06.1980
Код ссылки
<a href="https://patents.su/4-744432-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Устройство для испытания текстильных материалов на удар

Номер патента: 1363005
Опубликовано: 30.12.1987
МПК: G01N 3/32
Метки: испытания, текстильных, удар
...на вход установки "1" триггера 29, устанавливая его по прямому выходу в "1". С небольшой задержкой (необходимой/ для устойчивого переключения триггера 29) импульсы через линию 28 задержки, схему 32 И и схему 35 ИЛИ поступят на вход сложения дополнительного реверсивного счетчика 36. Сработает определитель 37 нуля, блокируя триггер 29 (закрываются триггерные ключи 21 и 22), при этом в дополнительном реверсивном счетчике 36 запишется то же число, которое одновременно вычиталось иэ основного реверсивного счетчика 24. К схеме 40 совпадения подключены выходы тех разрядов дополнительного реверсивного счетчика 36, которые в цифровом эквиваленте определяют наступление проскальзывания нити. В этом случае схема 40 совпадения через схему 41 ИЛИ...
Преобразователь угла поворота вала в код

Номер патента: 920802
Опубликовано: 15.04.1982
Авторы: Куус, Лебедев, Росланас, Юдовин
МПК: G08C 9/00
Метки: вала, код, поворота, угла
...ротора фазовращателя 1 и подается на усилитель-ограничитель 2. Сигналы прямоугольной формы, отличающиеся по фазе на 180, с двух выходов усилителя-ограничителя 2 подаются на счетные входы триггера 3 и 4 и поочередно переключают их (предположим по положительным фронтам сформированного сигнала), Выходные нап ряжения триггеров 3 и 4 и опорное напря,жение источника 11 поступают на входы формирователя 5 временных интервалов, На первом выходе формирователя 5 временных интервалов формируются два временных ин: 45 тервала: первый между передним (положи"тельным) фронтом опорного сигнала и передним:фронтом выхода триггера, синфазного с напряжением с выхода фазовращателя и второй между задним фронтом опорного сигнала и отрицательным фронтом другого...
Ультразвуковой преобразовательугла поворота вала b код

Номер патента: 805376
Опубликовано: 15.02.1981
Автор: Иноземцев
МПК: G08C 9/00
Метки: вала, код, поворота, преобразовательугла, ультразвуковой
...содержит диск 1, на которомустановлено тонкостенное кольцо 2,основание 3, пъезопреобраэователь 4,акустически контактирующие шарики 5,отражател б, поглотитель 7, опорныйгенератор 8, генератор УПВ 9, приемник 10, селектор 11, фаэометр 12,блоки 13 - 15 обработки сигнала,последний из которых является контрольным и блок 16 индикации,Преобразователь вал-код работаетследующим образом,Расположенное на диске 1, соединяемом с валом, тонкостенное кольцо2 служит основанием для круговогодвижения УПВ, возбуждаемых в рядеточек основания 3 с помощью пъезоцреобразователя 4 и акустически контактирующих шариков 5, 1 енерируемыеУПВ в точке акустического контактас торцовой частью кольца 2, распространяясь по ней, отражаются ототражающей границы 6 и...
Преобразователь угла поворота вала в код

Номер патента: 942090
Опубликовано: 07.07.1982
Автор: Новиков
МПК: G08C 9/00
Метки: вала, код, поворота, угла
...сигнала (одной иэ, фаэ питания фазоврашателя 5) пропорционален угловому перемещению вала фазовращателя 5, а следовательно, и перемещению механизма, связанного с валом фазоврашателя 5 через звено 6. Этот сигнал поступает на второй входквантователя 7, на первый вход которого приходят импульсы с первого выхода второго делителя 3 частоты, которые исполь зуются для квантоаанкя по фазе выходного сигнала фазоврашателя 5, На выходе кван тователя 7 формируются узкие квантованые по фазе импульсы, которые поступают на первый вход элемента 2 И 12, на второй вход которого поступает с выхода вычислителя 11 сигнал, вырабатываемый 1 О последним из кодовых сигналов на первом входе и выходе выходного регистра 8 и разрешающий прохождение на выход...
Устройство для автоматической коррекции амплитуды выходного сигнала магнитометрического частотного преобразователя

Номер патента: 279202
Опубликовано: 01.01.1970
МПК: G01R 23/06, H03M 1/60
Метки: автоматической, амплитуды, выходного, коррекции, магнитометрического, преобразователя, сигнала, частотного
...работы преобразователя компенсирующее напряжение имеет ступенчатую форму, 5 Максимальная амплитуда компенсирующегонапряжения (тока) 1/, зависит от уровня помех и от величины разъюстировки магнитной системы преобразователя.Компенсирующее напряжение (ток) создает о в объеме чувствительного элемента 5 изменяю279202 4 поступает суммарноеравное; значение тока 1,х х е егсвых: Но +Кг 1 пиайе 15 20 ираж 430 аказ 3231/3 одписиое ипография, пр, Сапупо 3Щееся магнитное поле. Тогда с выхода чувствительного элемента на частотомер поступает э.д.с, прецессии с частотой, равной: гдел Н, - начальное магнитное поле в объеме чувствительного элемента, например магнитное пойнте Земля; Х, - постоянная патентной системы:.преобразователя; 1 пил (1) - ток,...
Предыдущий патент: Устройство для управления пьезоэлектродвигателем
Следующий патент: Следящая система
Случайный патент: Способ изготовления полиграфическойстереопродукции