Устройство для моделирования параметров движения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
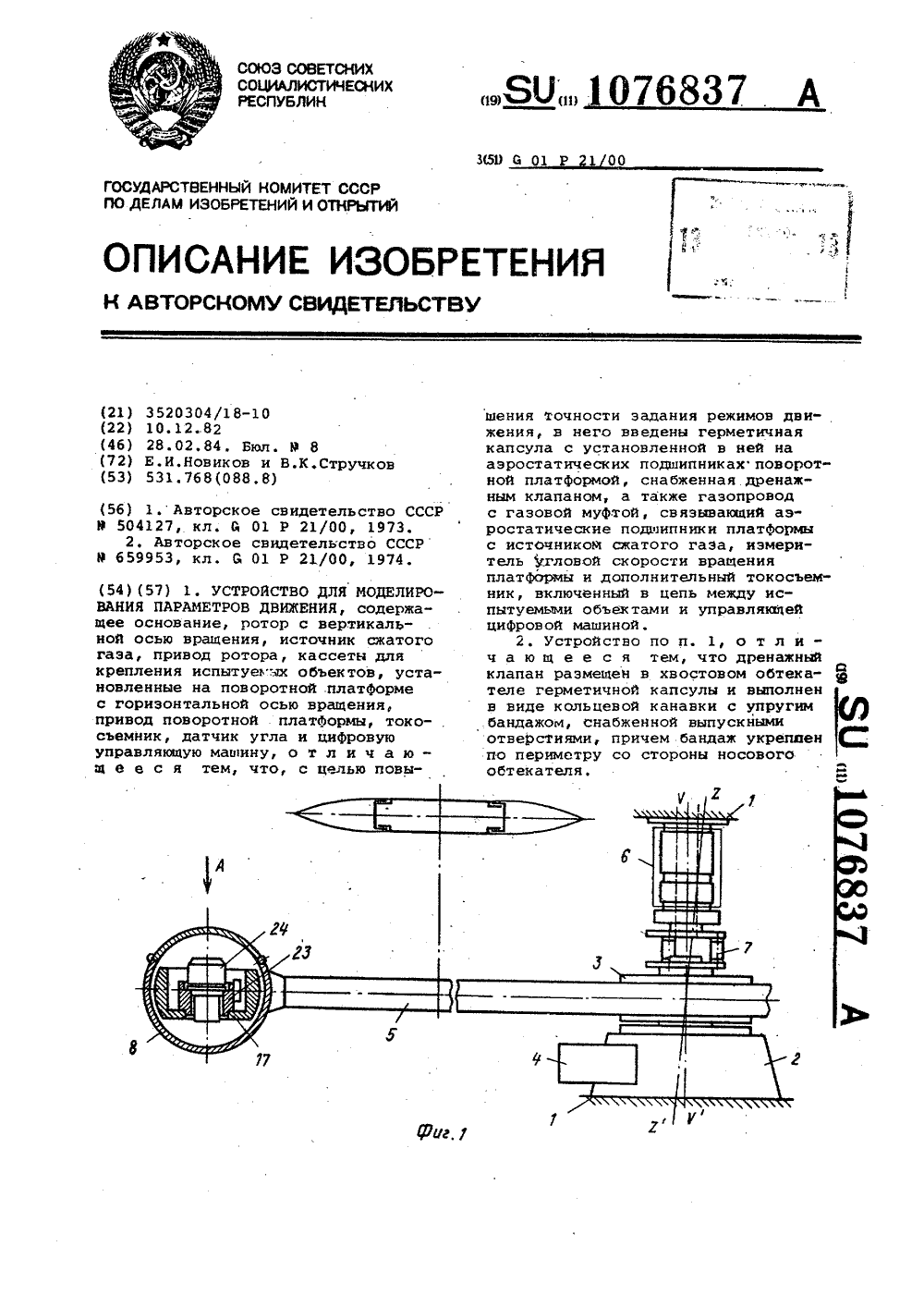
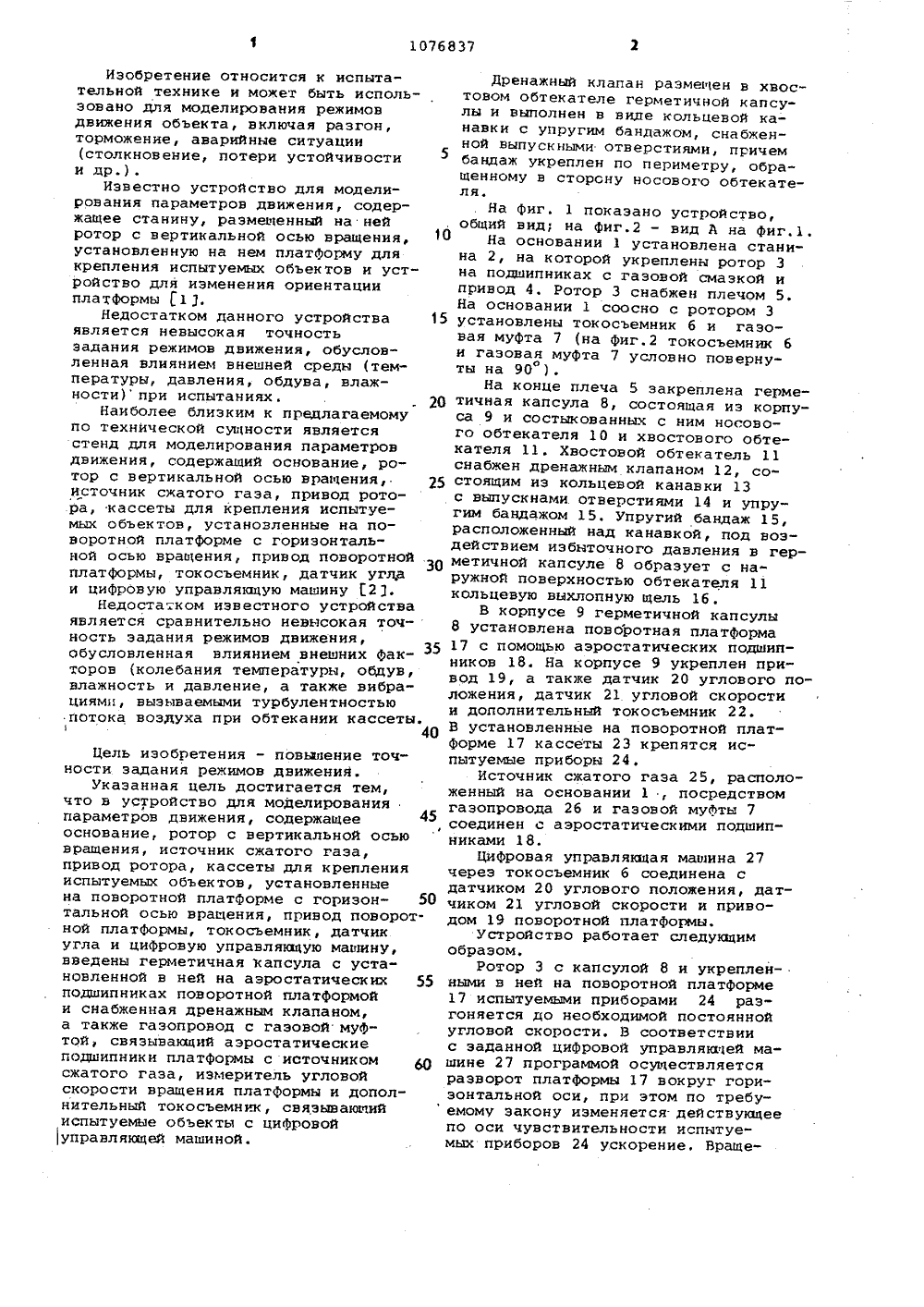
76837 А 3(51) б 0 ОПИСАНИЕ ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ-10 Бюл.в и8. 8) К. Стручков видетельство СССРР 21/00, 1973.идетельство СССРР 21/00, 1974.(56) 1. Авторское 9 504127, кл. й 012. Авторское св 9 659953, кл. 6 01 ОСУДАРСТ 8 ЕННЫЙ КОМИТЕТ СССРГЮ ДЕЛАМ ИЭОБРЕТЕНИЙ И ОТКРЫТИЙ(54)(57) 1. УСТРОИСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ, содержащее основание, ротор с вертикальной осью вращения, источник сжатогогаза, привод ротора, кассеты длякрепления испытуемых объектов, установленные на поворотной платформес горизонтальной осью вращения,привод поворотной платформы, токосъемник, датчик угла и цифровуюуправляющую машину, о т л и ч а ю -щ е е с я тем, что, с целью повыщения точности задания режимов движения, в него введены герметичная капсула с установленной в ней на аэростатических подшипниках поворотной платформой, снабженная. дренажным клапаном, а также газопровод с газовой муфтой, связывающий аэ" ростатические подшипники платформы с источником сжатого газа, измеритель угловой скорости вращения платформы и дополнительный токосъемник, включенный в цепь между испытуемыми объектами и управлякщей циФровой машиной.2. Устройство по п. 1, о т л ич а ю щ е е с я тем, что дренажныйа клапан размещен в хвостовом обтека- Е теле герметичной капсулы и выполнен в виде кольцевой канавки с упругим бандажом, снабжеиной выпускными отверстиями, причем бандаж укрепаен по периметру со стороны носового обтекателя.Изобретение относится к испытательной технике и может быть использовано для моделирования режимовдвижения объекта, включая разгон,торможение, аварийные ситуации(столкновение, потери устойчивостии др.)Известно устройство для моделирования параметрон движения, содержащее станину, размещенный на нейротор с вертикальной осью вращения,установленную на нем платформу длякрепления испытуемых объектов и устройство для изменения ориентацииплатформы 1 3,Недостатком данного устройства 15является невысокая точностьзадания режимов движения, обусловленная влиянием внешней среды (температуры, давления, обдуна, влажности)при испытаниях . 20Наиболее близким к предлагаемомупо технической сущности являетсястенд для моделирования параметровдвижения, содержащий основание, ро"тор с вертикальной осью вращения,. 25источник сжатого газа, привод ротора, кассеты для крепления испытуемых объектов, установленные на поворотной платформе с горизонтальной осью вращения, привод поноротнойплатформы, токосъемник, датчик углаи цифровую управлякщую машину 2 3.Недостатком известного устройстваявляется сраннительно невысокая точность задания режимов движения,обусловленная влиянием внешних Факторон (колебания температуры, обдув,влажность и давление, а также вибрациями, вызываемыми турбулентностьюпотока воздуха при обтекании кассеты.40Цель изобретения - повышение точности задания режимов движения.Указанная цель достигается тем, что в устройство для моделирования параметров движения, содержащее 45 основание, ротор с вертикальной осьювращения, источник сжатого газа,привод ротора, кассеты для крепленияиспытуемых объектов, установленныена поворотной платформе с гориэонтальной осью вращения, привод поворотной платформы, токосъемник, датчикугла и цифровую управляющую машину,введены герметичная капсула с установленной в ней на аэростатических 55подшипниках поворотной платформойи снабженная дренажным клапаном,а также газопровод с газовой муф"той, связывакщий аэростатическиеподшипники платформы с источником бсжатого газа, измеритель угловойскорости вращения платформы и допол"нительный токосъемник, связывающийиспытуемые объекть 1 с цифровой 1 управляющей машиной. Дренажный клапан размещен в хвостовом обтекателе герметичной капсулы и выполнен в виде кольцевой канавки с упругим бандажом, снабженной выпускными отверстиями, причембандаж укреплен по периметру, обращенному в сторону носового обтекателя.На Фиг. 1 показано устройство,общий вид; на фиг.2 - нид А на фиг.1.На основании 1 установлена станина 2, на которой укреплены ротор 3на подшипниках с газовой смазкой ипривод 4. Ротор 3 снабжен плечом 5,На основании 1 соосно с ротором 3установлены токосъемник б и газовая муфта 7 (на фиг.2 токосъемник 6и газовая муфта 7 условно повернуты на 90 ).На конце плеча 5 закреплена герметичная капсула 8, состоящая иэ корпуса 9 и состыкованных с ним носового обтекателя 10 и хвостового обтекателя 11. Хвостовой обтекатель 11снабжен дренажным клапаном 12, состоящим из кольцевой канавки 13с выпускнами отверстиями 14 и упругим бандажом 15. Упругий бандаж 15,расположенный над канавкой, под воздействием избыточного давления в герметичной капсуле 8 образует с наружной поверхностью обтекателя 11кольцевую выхлопную щель 16.В корпусе 9 герметичной капсулы8 установлена поворотная платформа17 с помощью аэростатических подшипников 18. На корпусе 9 укреплен привод 19, а также датчик 20 углового положения, датчик 21 угловой скоростии дополнительный токосъемник 22.В установленные на поворотной платФорме 17 ка.ссеты 23 крепятся испытуемые приборы 24,Источник сжатого газа 25, расположенный на основании 1 , посредствомгазопровода 26 и газовой муфты 7соединен с аэростатическими подшипниками 18.ЦиФровая управлякн(ая машина 27через токосъемник б соединена сдатчиком 20 углового положения, датчиком 21 угловой скорости и приводом 19 поворотной платформы.Устройство работает следукцимобразом,Ротор 3 с капсулой 8 и укрепленными в ней на поворотной платформе17 испытуемыми приборами 24 разгоняется до необходимой постояннойугловой скорости. В соответствиис заданной цифровой управляющей машине 27 программой осуществляетсяразворот платформы 17 вокруг горизонтальной оси, при этом по требуемому закону изменяется действукщеепо оси чувствительности испытуемых приборов 24 ускорение, Враще1076837 Составитель Г.Гртащишина Техред,М.Надь е тор Г. Решетник дакто ЭЕ Ю Ш каэ 739/42ВНИИПИ Подпи тета ССС открытий наб., д. 23 венного комобретений и 5, Раушская Тир Госуд по дел Москвао жрси 11303 рт шаа ш ююш и шфилиал ППП Патент, г. Ужгород, ул. Проектная, 4 ние платформы вокруг горизонтальной оси осуществляется приводом 19платформы, Аэростатические подшипники 18, на которых взвешена платформа, обеспечивают плавность ее вращения, а датчик 20 углового положения и датчик 21 угловой скорости позволяют контролировать соответствие фактического закона движения платформы и заданного в программе.Герметичная капсула 8, в которой 1 О расположены испытуемые приборы 24, исключает обдув их набегающим потоком, обеспечивая тем самим испытания при постоянных условиях окружающей среды.Отработанный в аэростатических подшипниках газ истекает в атмосферу через выхлопную цель 16 дренажного клапана 12, уменьшая турбелентность обтекающего капсулу потока воздуха и тем самым снижая вибрацию испытуемых приборов.Таким образом, предлагаемое устройство позволяет с большей точно" стью задавать режим движения.
СмотретьЗаявка
3520304, 10.12.1982
ПРЕДПРИЯТИЕ ПЯ А-1001
НОВИКОВ ЕВГЕНИЙ ИВАНОВИЧ, СТРУЧКОВ ВИКТОР КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G01P 21/00
Метки: движения, моделирования, параметров
Опубликовано: 28.02.1984
Код ссылки
<a href="https://patents.su/3-1076837-ustrojjstvo-dlya-modelirovaniya-parametrov-dvizheniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования параметров движения</a>
Устройство для защиты от превышения допустимой частоты вращения электродвигателя привода главного движения станка

Номер патента: 1224895
Опубликовано: 15.04.1986
Авторы: Зусман, Макаревич, Черток
МПК: H02H 7/093
Метки: вращения, главного, движения, допустимой, защиты, превышения, привода, станка, частоты, электродвигателя
...УРОВЕНЬ 11 цс.РЯЖЕНИЯ.При ВК:11 ОЧЕНИИ Привода ПО .",ЕрЕ УВЕЛИ- чения частоты Вращения увелисивается напряжение на выходе датчика,3 числа оборотов, световой указатель перемещается цо шкале вправо. ВтороЙ фоторезистор затемцяется, ца выходе второго канала блока 5 сигьализации появляется низкий;рове 11 ь напряжения. На входе инвертора 10 и на первом входе элемента ЗИ 12, связанных с выходом Второсо кацала блока 5 сигнализации, тоже низкий уровень. С выхода ицвертора 10 высокий уровень напряжения поступает ца 5-вход григгера 11, а с второго ьсхода коммутапгора 7 направлессия вращения ця Й-вход :сизкий уровень. Триггер 11 устанавливается в единичное состояние. На втором и третьем входах элемента ЗИ 12, связанных соответствеццо с...
Приспособление для управления включением и выключением сцепных муфт на валу динамо-машины могущей приводиться в движение от турбины и от вагонной оси

Номер патента: 29485
Опубликовано: 31.03.1933
Автор: Воротников
МПК: B60K 25/08, B61D 29/00
Метки: вагонной, валу, включением, выключением, движение, динамо-машины, могущей, муфт, оси, приводиться, сцепных, турбины
...с приводом передачи от колеса вагона.На чертеже фиг. 1 схематически изображает вид сбоку предлагаемого при- способления; фиг. 2 - то же, вид сверху.На впускной трубе паровой турбины установлен цилиндр 22, который вмещает в себе поршень 23, шток 24 коего связан с отводками 2 и 2, при чем с отводкой муфты 3 на валу между динамомашиной и турбиной он связан при посредстве тяг 5 и 7, а с отводкой муфты 3, расположенной на валу между динамомашиной и приводом от колеса вагона, - непосредственно.Во время хода поезда, шток поршня отжимается пружиной 25, и тогда муфта 3 сцепляет вал динамомашины с приводом от колеса вагона, а муфта 3 расцепляет вал динамомашины с валом турбины. В случае же остановки поезда производится впуск в турбину пара,...
Цифровой регулятор скорости вращения электрического привода

Номер патента: 495649
Опубликовано: 15.12.1975
МПК: G05D 13/00
Метки: вращения, привода, регулятор, скорости, цифровой, электрического
...6. Затем происходит измерение длительности )ц)тервяла времени, пропорццоц; льпого скорости вращения, посредством псдсчета в СЧ 10 суммарного числа импульсов, введенных параллельным кодом из блока задания 9 и приходящих за измеряемый интервал от кварцевого генератора 4, Измсрспие заканчивается с приходом 1 пульса дрхгого регистрирующего устройства датчик скорости ца вход формирователя 7. Прт: этом фОрХИруЕТС 5( заДНИЙ фрОНТ ИЗМср 5(сл;030 Иц. тсрвала. Одновременно в логической схеме 8 фсръИруется импульс контроля состояцц 51 СЧ 10 выбранному диапазону рсгулцровгцпи в цифровой форме, т. е. суммарному числу импульсов в СЧ 10 (9910 - 9965). Если такого соответствия нет, то блок 13 поиска диапазо ця устанавливает две младшие декады СЧ...
Групповой привод движущих осей тепловоза с двумя и более гидропередачами

Номер патента: 219611
Опубликовано: 01.01.1968
Метки: более, гидропередачами, групповой, движущих, двумя, осей, привод, тепловоза
...валов и осевых редукторов,от.тиииотиийся тем, что, с целью повышения использования сцепцого веса тепловоза и увеличения коэффициента сцепления колес с рельсамц, раздаточные валы гидропередач 0 соед 1 шсны между собой валопроводом. ГРУППОВОЙ ПРИВОД Д С ДВУМЯ И БОЛ.1Известен групповой привод движущих осей тепловоза с двумя и более гидропередачамн, состоящий из карданных валов и осевых редукторов.В предложенном приводе для повышения использования сцепного веса тепловоза и увеличения коэффициента сцепления колес с рельсами раздаточные валы гидропередач соединены между собой валопроводом.На чертеже изображена схема описываемого привода. Дизели 1 и 2 соединены муфтами 3 и 4 с гидропередачами 5 и б, раздаточные валы 7 и 8 которых с одной...
Поворотная платформа для калибровки датчиков угловых скоростей

Номер патента: 714288
Опубликовано: 05.02.1980
Авторы: Бансевичюс, Вазнелис, Рагульскис, Улинскайте
МПК: G01P 21/00
Метки: датчиков, калибровки, платформа, поворотная, скоростей, угловых
...на фиг. 2 - разрез А-А на фиг. 1. 15Платформа состоит иэ стола 1 длякрепления испытуемаго прибора, ротьра 2, смонтированнбго в подшипниках3. К ротору прижаты два пьеэоэлект рических преобразователя 4 пружиной 5. На роторе 2 установлен гаситель б крутильных колебаний с перемычкой 7,. на которой расположендатчик положения 8, например тензо датчик, сбединенный через токосъемник 9 и формирователь 10 с переключающим устройством 11. Выход последнего соединен с электродами пьезоэлектрических преобразователей 4,а вход - с генератором 12./714288 Формула изобретения 1, Патент США Р 3830091,кл. 73-1, 1974. Составитель И.Казаков - .дактор О.филиппова Техред Л.Алферова. Корректор Я.Веселовск Заказ 927 б 740Тираж 1019 "Подписное ЦНИИПИ...
Предыдущий патент: Пьезоэлектрический акселерометр
Следующий патент: Индуктивный делитель напряжения
Случайный патент: Робот-укладчик