Автоматизированная система управления рулевым приводом судна
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1654132
Автор: Хоточкин

Текст
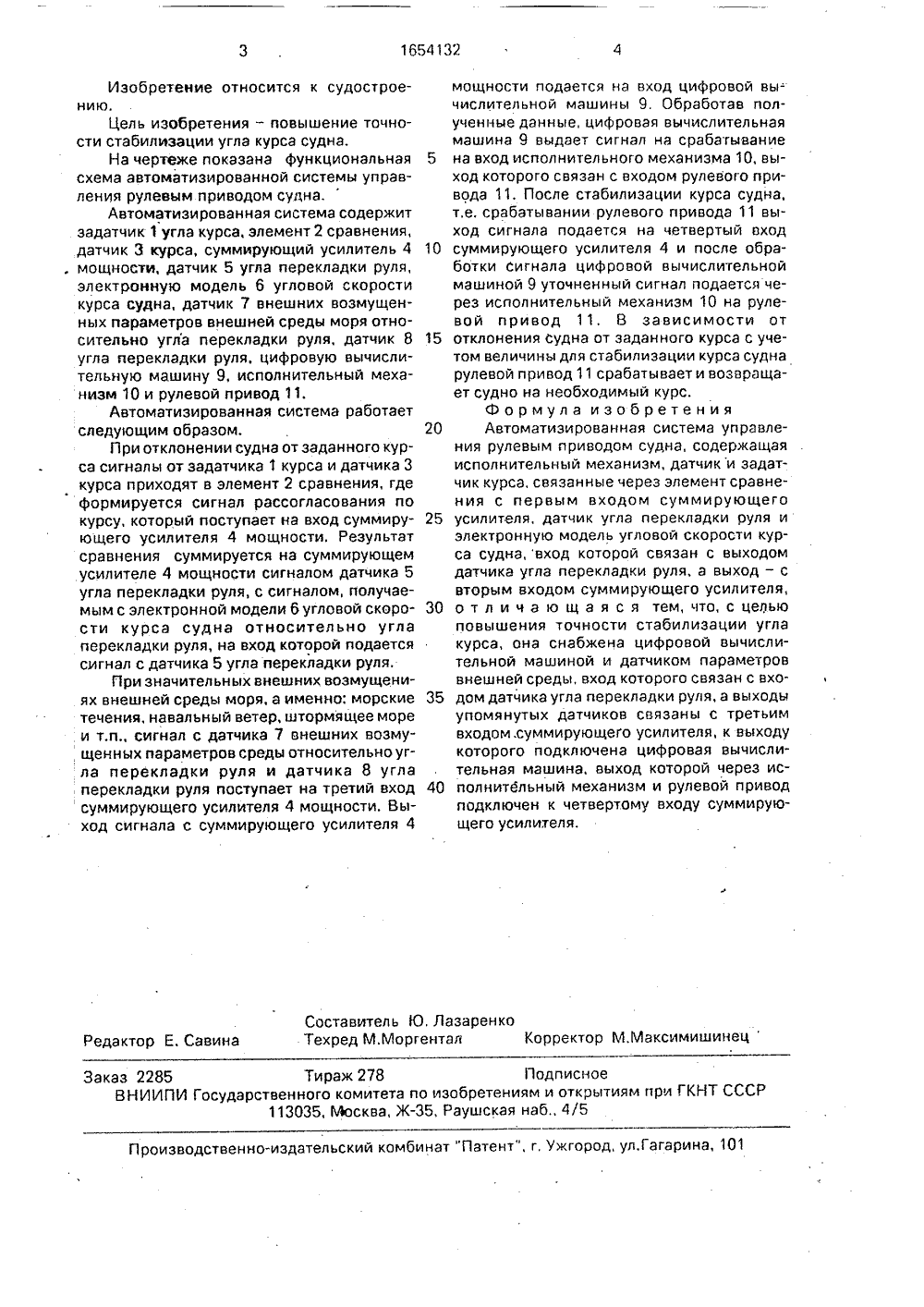
(56) Авторское свидетельство СССРЬЬ 1093622, кл, В 63 Н 25/00, 1983,(54) АВТОМАТИЗИРОВАННАЯ СИСТЕМАУПРАВЛЕНИЯ РУЛЕВЫМ ПРИВОДОМСУДНА(57) Изобретение относится книю. Цель изобретения - повыш судостроеение точноГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР сти стабилизации угла курса судна. Система включает эадатчик 1 курса, датчик 3 курса датчика 7 возмущенных параметров внешней среды и датчик 8 угла перекладки руля, связанными с суммирующим усилителем 4, цифровую вычислительную машину 9, исполнительный механизм 10 и рулевой привод 11. При этом величина ошибки курса исправляется рулевым приводом с возможностью ее выдачи на цифровую вычислительную машину 9, обработки ее и устранения исполнительным механизмом 10. 1 ил,1654132 Изобретение относится к судостроению.Цель изобретения - повышение точности стабилизации угла курса судна,На чертеже показана функциональнаясхема автоматизированной системы управления рулевым приводом судна.Автоматизированная система содержитзадатчик 1 угла курса, элемент 2 сравнения,датчик 3 курса, суммирующий усилитель 4, мощности, датчик 5 угла перекладки руля,электронную модель 6 угловой скоростикурса судна, датчик 7 внешних возмущенных параметров внешней среды моря относительно угла перекладки руля, датчик 8угла перекладки руля, цифровую вычислительную машину 9, исполнительный механизм 10 и рулевой привод 11.Автоматизированная система работаетследующим образом,При отклонении судна от заданного курса сигналы от задатчика 1 курса и датчика 3курса приходят в элемент 2 сравнения, гдеформируется сигнал рассогласования покурсу, который поступает на вход суммирующего усилителя 4 мощности. Результатсравнения суммируется на суммирующемусилителе 4 мощности сигналом датчика 5угла перекладки руля, с сигналом, получаемым с электронной модели 6 угловой скорости курса судна относительно углаперекладки руля, на вход которой подаетсясигнал с датчика 5 угла перекладки руля.При значительных внешних возмущениях внешней среды моря, а именно: морскиетечения, навальный ветер, штормящее мореи т.п., сигнал с датчика 7 внешних возмущенных параметров среды относительно угла перекладки руля и датчика 8 углаперекладки руля поступает на третий входсуммирующего усилителя 4 мощности. Выход сигнала с суммирующего усилителя 4 мощности подается нэ вход цифровой вы-" числительной машины 9. Обработав полученные данные, цифровая вычислительная машина 9 выдает сигнал на срабатывание на вход исполнительного механизма 10, выход которого связан с входом рулевого привода 11, После стабилизации курса судна, т.е, срабатывании рулевого привода 11 выход сигнала подается на четвертый вход суммирующего усилителя 4 и после обработки Сигнала цифровой вычислительной машиной 9 уточненный сигнал подается через исполнительный механизм 10 на рулевой привод 11, В зависимости от отклонения судна от заданного курса с учетом величины для стабилизации курса судна 5 10 15 рулевой привод 11 срабатывает и возвращает судно на необходимый курс.Формула изобретения Автоматизированная система управления рулевым приводом судна, содержащая исполнительный механизм, датчики задатчик курса, связанные через элемент сравнения с первым входом суммирующего усилителя, датчик угла перекладки руля и электронную модель угловой скорости курса судна, вход которой связан с выходом датчика угла перекладки руля, а выход - с 20 25 вторым входом суммирующего усилителя, о т л и ч а ю щ а я с я тем, что, с целью 30 повышения точности стабилизации угла курса, она снабжена цифровой вычислительной машиной и датчиком параметров внешней среды, вход которого связан с вхо 35 дом датчика угла перекладки руля, а выходы упомянутых датчиков связаны с третьим входом. суммирующего усилителя, к выходу которого подключена цифровая вычислительная машина. выход которой через исполнительный механизм и рулевой привод подключен к четвертому входу суммирующего усилителя,40 Составитель Ю, ЛазаренкоТехред М.Моргентал Корректор М.МаксимишинецРедактор Е, Савина Производственно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 101 Заказ 2285 Тираж 278 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., 4/5
СмотретьЗаявка
4701504, 06.06.1989
ПРЕДПРИЯТИЕ ПЯ В-2141
ХОТОЧКИН ЕВГЕНИЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: B63H 25/00
Метки: автоматизированная, приводом, рулевым, судна
Опубликовано: 07.06.1991
Код ссылки
<a href="https://patents.su/2-1654132-avtomatizirovannaya-sistema-upravleniya-rulevym-privodom-sudna.html" target="_blank" rel="follow" title="База патентов СССР">Автоматизированная система управления рулевым приводом судна</a>
Задатчик угла перекладки руля

Номер патента: 1057379
Опубликовано: 30.11.1983
Авторы: Борисов, Дорошин, Жаринов, Зайцева, Цыганков, Шлейер
МПК: B63H 25/00
Метки: задатчик, перекладки, руля, угла
...создания перио.дических колебаний судна в процессеходовых испытаний судоводительустанавливает в блоке 7 заданияамплитуды отклонений руля желаемуюамплитуду колебаний, частота Ы колебаний определяется крутизной сигналаугла перекладки руля (К сГ) по сравнению с крутизной сигнала рассогла"сования по курсу (ДЮ) и значениемугла перекладки руля (бЧ из следующей зависимости:Ео 3):д" з 1 л (дЧ+ к шд"), (1)10 где Е(м) - функция частоты колебаний;КОЗ - крутизна сигнала, устанавливаемая в задатчикеб периода колебанийо с, - масимальный угол перекладки руля.Для рассматриваемого класса судовэта зависимость близка к линейномувиду К: К 03 (2)где К - коэффициент пропорциональности.Ддя большинства судов и кораблейзадатчик б периода колебаний можетбыть...
Способ испытания бесконтактного авторулевого в режиме автоматической стабилизации курса на серийном судне

Номер патента: 501928
Опубликовано: 05.02.1976
Автор: Горстков
МПК: B63H 25/04
Метки: автоматической, авторулевого, бесконтактного, испытания, курса, режиме, серийном, стабилизации, судне
...машину, авторулевой -в режиме Автомат. На панели пульта управления авторулевого ручки изменения коэффи циента регулировки сигнала тахогенератора икоэффициента обратной связи устанавливают в положения, выставленные на ходовых испытаниях авторулевого. На пульт управления авторулевого подают сигнал изменения курса.25 Характер и величину сигнала изменения курсаподбирают такими, чтобы угол перекладки пера руля на оба борта не превышал 20. Фиксируют характер и величину изменения курса (амплитуду и частоту) по указателю курса 30 на пульте управления авторулевого, Фикси501928 Формула изобретения Составитель Ю. ГорстковРедактор С. Титова Техред Е, Подурушина Корректоры: Е. Давыдкина и В. Дод Заказ 657/9 Изд, Ма 209 Тираж 575 Подписное ЦНИИПИ...
Стабилизатор “нева” курса речных судов

Номер патента: 615456
Опубликовано: 15.07.1978
Авторы: Любимов, Мирошниченко, Муратиков, Ходырев, Ченцов, Чистяков, Шлейер
МПК: G05D 1/02
Метки: курса, нева, речных, стабилизатор, судов
...задержки курсового сигнала, блок 14 временной задержки сигнала на поворот, усилитель мощности 15, пост ручного управления 16, рулевой привод 17, руль 18, датчик угла руля 19, дифференцирующий блок 20, контакты 21, 22 переключателя 23 постов управления, контакты 24, 25, 26, 27 тумблера поворота, регулируемые резисторы 28, 29, 30, 31, 32, контакт 33 переключателя 23 постов управления.Стасилизатор курса управляется по закону= К 1 А+ К - д-+ КЛз + К ",где- угол перекладки руля,- угол отклонения от курса, Ьз, Ц - напряжения, пропорциональные соответствующим гараметрам,Сигнал с сельсина настройки 4 поступает на фазочувствительный усилитель 5 и далее на двигатель отслеживания 6, который приводит в согласованное с индукционным датчиком 2...
Авторулевой

Номер патента: 656028
Опубликовано: 05.04.1979
Авторы: Миренский, Шлейер, Юргенс
МПК: G05D 1/00
Метки: авторулевой
...2и суммирующему усилителю 4, Блокинтегрирования 2 подключен к входу суммирующего усилителя 4, Блок 3подключен к входу суммирующего усилителя 4. Выход суммирующего усилителя 4 подключен к входу рулевого привода (на чертеже не "показан). Датчик момента 5 на . валу гребного винта подключен к вычислительному блоку 6, выход которого 65:подключен к блоку адаптации 7. Выход блока 7 подключен к управляющему входу блока дифференцирования 3.Устройство работает следующим образом. В режиме стабилизации курса при рыскании судна относительногенерального курса сигналы блока 3,пропорциональные производной от угла курса блока рассогласования 1 по курсу и блока интегрирования 2, постуйают на вход суммирующего усилителя 4.В результате рулевой привод...
Гидравлический привод руля судна

Номер патента: 931590
Опубликовано: 30.05.1982
Авторы: Кауров, Коротков, Огарков, Поляков
МПК: B63H 25/30
Метки: гидравлический, привод, руля, судна
...2) или к расположенным в одном из цилиндров камерам (фиг. 3) силового исполнительного механизма. Если нагнетательным трубопроводом является трубопровод 23, то рабочая жидкость через клапан 4, клапанную коробку 8, электромагнитные клапаны 9 и 10 по трубопроводам 27 и 28 поступает в цилиндры (камеры) 13 и 16, при этом из цилиндров (камер) 14 и 15 по трубопроводам 29 и 30 через электромагнитные клапаны 9 и 10, кЛапанную коробку 8, клапан 6, трубопровод 24 рабочая жидкость поступает на всасывание к насосу переменной производительности агрегата 2, при этом румпель 17 поворачивается по часовой стрелке, вызывая отклонение.При нарушении герметичности одного из трубопроводов, расположенных за клапанной коробкой 8, или одного из цилиндров (камер)...
Предыдущий патент: Электроэнергетическая установка судна
Следующий патент: Устройство для укладки изделий в тару
Случайный патент: Способ определения параметров неустойчивых течений в компрессоре