Патенты с меткой «автомат»
Автомат для гибки труб наматыванием

Номер патента: 1547917
Опубликовано: 07.03.1990
Автор: Парамонова
МПК: B21D 7/02
Метки: автомат, гибки, наматыванием, труб
...углом наклона. 1-1 а станине 1 с возможностью взаимодействия со штоком цилиндра 20 установлен золотник 27.Автомат работает следующим образом.Торцовые стенкибункера 2 устанавливают в соответствии с длиной трубных заготовок и расположением места гиба. В бункер 2 загружают трубные заготовки 3, которые по наклонному дну бункера 2 скатываются в накопитель. Нижняя и:. заготовок 3 из накопителя попадает в пазы приводных ползунов 12. Автомат зключа,от. С помощью цилиндра 13 и рсецнз гпестсреных передач ползуны 12 по,п 1 о 1 заготовку 3 вниз, в зону гибки. При этом остальные заготовки удерживаются в нкопателе бункера 2 от выпадения рифленными выступами ползунов 12. Г-образный ползун 19 с помощью цилиндра 20 и реецно-шестеренпой...
Роторный автомат

Номер патента: 1548127
Опубликовано: 07.03.1990
Авторы: Лебедев, Лебедева, Рыжиков, Самохвалов
МПК: B30B 11/12, B65G 29/00
Метки: автомат, роторный
...5 на секторы 6, установленные на.осях 7 качания. Положениекаждого сектора 6 относительно горизонтальной плоскости устанавливается роликами 8 при помощи копира 9,расположенного на станине 10, На этой 20же станине посредством шариков 11расположены транспортное кольцо 12с индивидуальным приводом 13, вибрационные приводы 14 на позициях загрузки 15 и выгрузки 16 и обечайка 17.Ротор 1 установлен на оси 18, Всесекторы 6 ротора 1, кроме трех, охвачены технологическим пространством 19,Каждый сектор 6 снабжен шибером 20,размещенным на оси 21 управляемымкулачками (не показаны), расположенными на станине 10 на позициях загрузки и выгрузки.Роторный автомат работает следующим образом,35Ротор 3 подачи направляет изделиев лоток-накопитель...
Автомат для электроэрозионной обработки внутренних сопрягаемых поверхностей

Номер патента: 1549684
Опубликовано: 15.03.1990
Авторы: Александровская, Галушин
МПК: B23H 7/26
Метки: автомат, внутренних, поверхностей, сопрягаемых, электроэрозионной
...позиции. В системе 4 активного контроля измерительные наконечники 5 арретированы, устройство 7 удерживает лоток 8 в отведенном состоянии от мембранного патрона 9, Блок 6 перемещений электродов с приводами 10-14, а также механизм 15 и привод . 22 отключены., Окна 1 6 в корпусе 17 расположены свободно относительно лотка 8. Стержень 18 отведен в крайнее левое положение приводом 25, а приводом 26 лепестки 27 мембраны 28 разжаты, Для загрузки распы- лителя 3 включают механизм 15, который поворачивает патрон 9 относительноъ лотка 8, Подключают устройство 7, которое перемещает лоток 8 внутрь кор 1пуса 17 до совмещения оси шпинделя 21 и оси загружаемогораспылителя, Приводом 25 перемещают стержень 8, ко5 15496 торый толкает распылитель вдоль...
Автомат для ударной конденсаторной сварки

Номер патента: 1549705
Опубликовано: 15.03.1990
Авторы: Голяницкий, Емченко-Рыбко, Калеко, Калмыков, Кон
МПК: B23K 31/02, B23K 37/04
Метки: автомат, конденсаторной, сварки, ударной
...но послеобрезки проволоки включаются контакть 1блока управления, на свариваемые детали подается напряжение заряда конденсаторной батареи, а ударный механизм перемещается вправо на позициюсварки. За это время нож механизмаобрезки проволоки возвращается в исходное положение.Детали из чаши вибропитателя механизма 3 подачи стержневой детали подаются на вибролоток, ориентируютсяв вертикальное положение, накапливаются в лотке, отсекаются из общегопотока по одному и подаются толкателем в цангу механизма позиционногобарабана 5, При повороте барабана на90 штырь перемещается на позициюо50сварки и выстаивает в этом положениидо конца цикла, За это время производится приварка проволочного вывода,отключение напряжения конденсаторнойбатареи и...
Сборочный автомат

Номер патента: 1549714
Опубликовано: 15.03.1990
Авторы: Голованов, Житников, Кузьмин
МПК: B23P 21/00
Метки: автомат, сборочный
...4 перемещаются конвейером 1 влево, При этом крышки б под собственным весом из первого по ходу движения каретки 4 магазина 5 опускаются в ложементы 10. При взаимодействии задвижки 11 с кулачком 17 обе задвижки 11 и 12 синхронно раздвигаются и крышка 6 из второго магазина 5 опускается в от - крывшийся ложемент 10, Наряду с этим при взаимодействии одной из подпружиненных собачек 27 с рычагом 25 срабатывает питатель 24 и подает две шпильки 8 в лоток 28, После заполнения всех ложементов 10 крышками 6 конвейер1 получает перемещение вправо. В ходе этого перемещения шпильки 8 из лотка 28 попадают в отверстия первой из крышек 6, после чего питатель 24 вновь получает движение от собачки 27 и подает в лоток 28 поочередную пару шпилек 8...
Автомат для сборки деталей типа вал с дисками

Номер патента: 1551511
Опубликовано: 23.03.1990
Авторы: Бостан, Ботез, Дулгеру, Попа, Чупина
МПК: B23P 19/027
Метки: автомат, вал, дисками, сборки, типа
...наружной пооерхностью одной из со"бираемых деталей 7-9.Механизм напрессовки выполнен ввиде штока 57 и копира 58, Последнийимеет форму кольца и размещен на плите 3 на поверхности, обращенной кповоротному столу 4, Количество силовых участков на этом копире и количество обрезиненных элементов 52"54 равно количеству собираемых в од"ном цикле деталеи 7-9,Шток 57 установлен в корпусе 59,прикрепленном к поворотной .голооке60, а сама головка 60 установлена настойке 61. Количество стоек 61 равноколицеству позиций в автомате.На конце штока 57, обращенногок столу 4, смонтирована с возможностьюповорота опора 62, а на другом конце установлен свободно вращающийсяролик 63, Шток 57 подпружинен относительно корпуса 59 посредством пружины 64.Автомат...
Автомат для сборки деталей

Номер патента: 1551512
Опубликовано: 23.03.1990
МПК: B23P 19/04
Метки: автомат, сборки
...образом.По лоткам 4 и 5 собираемые детали 28 и 29 поступают в сборочноеустройство 6, при этом кулачки 12 и5013 разведены, толкатель 10 находится в нижнем положении, а продольная . ось лотка 7 совпадает с осью лоткапричем деталь 28 упирается в ранее собранное изделие, размеценноев лотке 7, При наличии деталеи в55сборочном устройстве 6 и собранного изделия в лотке 7 на входе элементов 21-23 устанавливаются нулевые сигналы, а на выходе - единичные сигналы. Благодаря этому эпемейты 24 и 25 подают на триггер 26 единич ный сигнал, ведущий к его переключению и включению привода 9, омандоаппарат 8 совершает. неполный оборот, в течение которого толкатель 10 устанавливает деталь 29 в деталь 28, после чего кулачки 12 и 13 обжимают края детали...
Автомат для упаковывания изделий в полимерную пленку

Номер патента: 1551586
Опубликовано: 23.03.1990
Авторы: Дуля, Степанов, Турков
МПК: B65B 9/06
Метки: автомат, пленку, полимерную, упаковывания
...6, рулонодержатель 7, рукавообразователь 8 с приспособлением 9 для образования продольного шва, включающим желоб 10 спрорезью, каналы 11 охлаждения, проволоцные нагреватели 12 и сопла 13для охлаждения продольного шва рукава. Каждое приспособление 5 для образования поперечного шва состоит изтеплоэлектроизоляционного корпуса 11,электронагревателя 15 и разъемныхконтактов 16. В корпусе 1 ч выполненканал 17 для охлаждения сжатым воздухом электронагревателя 15. Последний имеет компенсаторы 18 температурных деформаций, представляющие собойизогнутые участки, образованные нанерабочей части электронагревателей15. Каждый электронагреватель 15 выполнен в виде пластины с тавровымсечением, основание 19 которого служит для сварки, а ребро 20 -...
Автомат навивки многорядных спиралей из капиллярных труб

Номер патента: 1555018
Опубликовано: 07.04.1990
Авторы: Жикленков, Подойницын, Скрябов
МПК: B21D 11/06, B21F 3/04
Метки: автомат, капиллярных, многорядных, навивки, спиралей, труб
...н исходное положение пружиной43. На ползуне 38 закреплен копир 44,взаимодействующий с толкателем 41, 10Рабочая поверхность копира 44 расположена под углом з к оси перемещения ползуна 38, На основании 1 накронштейне 45 закреплен силовой цилиндр 46 с поршнем 47 и штоком 48, 15в котором образованы рабочие полости 49 и 50. 11 ток 48 расположен соосно оси вращения вала 3, На кронштейне 45 закреплено устройство 51 длядоворота и фиксации вала 3 н оиределенном угловом положении, рабочийорган 52 которого взаимодействует сзубчатым колесом 5 вала 3, Позиция53 - навиваемая капиллярная трубка,позиция 54 - конец трубы, закрепляемой на оправке 32, позиция 55 - навитая капиллярная труба,Автомат работает следующим образом,Подачей сжатого...
Автомат для сборки крепежных элементов

Номер патента: 1555103
Опубликовано: 07.04.1990
МПК: B23P 19/08
Метки: автомат, крепежных, сборки, элементов
...каналах 20 соответствующих сборочныхмеханизмов 11. При срабатывании пневмоцилиндра 15 вначале ловитель 16проходит через отверстие в шайбе иперемещается вверх до упора в стержень болта 7, ориентированное положение которого обеспечивают ползушки 19. Далее толкатель 14 перемещает шайбу вверх, освобождая ее от фиксаторов 17 и раздвигая ползушки 19, После этого пневмоцилиндр 15 возвращает толкатель 14 в исходное положение, а болт 7 с установленной на нем шайбой переносится столом 2 к следующему сборочному механизму 11. После сборки всех крепежных элементов срабатывает пневмоцилиндр 20, колесо 22 катится по рейке, нарезанной на основании 1, и перемещает шибер 23, который сбрасывает собранный комплект в лоток 24, цикл сборки...
Сборочный автомат

Номер патента: 1555104
Опубликовано: 07.04.1990
Авторы: Радченко, Романтеев, Сычук
МПК: B23P 21/00
Метки: автомат, сборочный
...резьбозавертного механизма 7 выполнен в 25виде кулачка 14, Механизм 8 выгрузкивыполнен в виде диска 15 с подпружиненными штырями 16 электромагнита 17,кулачка 18 и лотка 19 с крышкой 20,в которой выполнен паз 21. Диск 15с помощью зубчатой передачи 22 кинематически связан со столом 2,Сборочный автомат работает следующим образом,Собираемые детали - контакт 23и гайка 24 по лоткам 4 и 5 подаютсяк столу 2 и размещаются последовательно в баэирующих приспособлениях13, Винты по лотку 6 подаются в резьбозавертной механизм 7 который по 40лучая вертикальное перемещение откулачка 14, скрепляет с помощью нихдетали 23 и 24. При дальнейшем повороте стола 2 собранное изделие подается к механизму 8 выгрузки, В тот45момент, когда изделие...
Автомат для изготовления электрических катушек

Номер патента: 1555718
Опубликовано: 07.04.1990
Авторы: Зильбербранд, Штейнбук
МПК: H01F 41/04
Метки: автомат, катушек, электрических
...кольцом 23, стяжками 25 и планшайбой образовано окно для проходаи заправки провода 26, В кольце 23 45в подшипнике 27 установлен конусныйупор 21. Кольцо 24 установлено в подшипнике 28, который в свою очередьсмонтирован в обойме 29. Обойма 29имеет ацы 30, с орым заидействует вилка 31, шарнирно закрепленная накорпусе 6. Вилка 31 подпружинена пружиной 32 и соединена с пневмоцилиндром 33,На вилке установлен флажок 34,взаимодействующий с датчиком 35, закрепленным на корпусе 6. Кроме того,оправка 3 выполнена короче каркаса5 на величину захода в него упора 21 и рабочего зазора между оправкой 3 иупором 21. Зазор необходим для того,чтобы упор 21 зафиксировал каркас 5,а не взаимодействовал с оправкой 3.Автомат работает следующим...
Автомат для контроля и сортировки колец

Номер патента: 1556768
Опубликовано: 15.04.1990
Авторы: Белянчиков, Голубев
Метки: автомат, колец, сортировки
...замыкатель 30, закрепленный на диске 25, входит в щель корпуса синхронизатора, при этом изменяется уровень сигнала на выходе синхронизатора 49. Это изменение уровня сиг1556768 5 10 15 г 0 25 Зд 35 4 О 55 5нала фиксируется микропроцессором 52, который выключает электродвигатель 33 через ключ 57.При контроле диаметр кольца отслеживается шариками измерительной вставки 24 и информация передается нг измерительный стержень растрового фотоэлектрического преобразователя 18, который вырабатывает последовательность электрических импульсов напряжения, которая поступает на вход счетчика 56 импульсов и подсчитывается им.Через промежутки времени И=50 мкс число импульсов, записанное в счетчик 56, считывается через модуль 55 ввода - вывода в...
Автомат для сварки и способ его перемещения

Номер патента: 1556854
Опубликовано: 15.04.1990
МПК: B23K 37/02, B23K 9/12
Метки: автомат, перемещения, сварки
...(фиг. 1). Поддерживающий ролик 13 имеет телескопическую конструкцию для изменения высоты Н и с помощью шарнира (не показан) может поворачиваться вокруг горизонтальной оси О.10Схема работь 1 этого устройства приведена на фиг. 3. При установкс стойки с поддерживающим роликом вертикально (фиг. За) реакция, возникающая на опорной поверхности, зависит от величины силы натяжения проволоки, угла а наклона проволоки в сторону СМП и угла р, который определяется по формуле 1 д= в , .де ий20 высота подъема поверхности поддерживающего ролика над горизонтальной плоскостью, проведенной через верхнюю тоцку подающего ролика; 1, - расстояние от оси горелки до оси стойки, определяемое кон струкцией тележки. При значении (=0реакция йминимальна. Это условие...
Автомат для изготовления негерметичных металлорукавов из ленты

Номер патента: 1558526
Опубликовано: 23.04.1990
Авторы: Ватчин, Устинович, Хазов
МПК: B21C 37/12
Метки: автомат, ленты, металлорукавов, негерметичных
...сочлененной с рамой 1 опоры 13 со смонтированными на ней микро- выключателем 14 и двуплечим рычагом 15, подпружиненным относительно опоры3 пружиной 16, Рычаг 15 взаимодействует одним концом через регулировочный винт 1 с микровыключателем 4, а другим через флажок 18 с подаваемой лентой 19 и установлен на оси 20. Опора 13 со смонтированным на нем устройством контроля завивки на время наладки металлорукава может откидываться из зоны оправки 7 поворотом вокруг оси 21, отжав предварительно фиксирующую защелку 22, Ось21 смонтирована в проушине 23, которая крепится к раме 1.Для получения всей номенклатуры диаметров металлорукавов шпиндель и ролики 10 имеют регулировку в пространстве по всем трем координатам.Барабан 4 вращается синхронно с...
Автомат для стыковой сварки давлением цилиндрических стержней

Номер патента: 1558607
Опубликовано: 23.04.1990
Авторы: Безпрозванный, Глаголев, Голензовский, Кононец, Широковский
МПК: B23K 11/04
Метки: автомат, давлением, сварки, стержней, стыковой, цилиндрических
...с приводом 27 зубчатой рейкой 28, положение которой фиксируется привод 5 ными фиксаторами 29 и 30, установленными с возможностью горизонтального перемещения в рамке 31 под действием привода 32. Поворот змейкового спуска 24 вокруг оси 33 на угол, зависящий от диаметра стержня, осуществляется приводом 34 периодического шагового вращения.Автомат работает следующим образом.Под действием приводов загрузочных устройств 1 и 2 заготовки подаются в раскрытые зажимные губки 7 зажимных механизмов 4 и 5 и фиксируются в них. 20Механизм 6 подачи .иосадки перемещает подвижный зажим 4 справа налево сначала под действием пружины а затем - цилиндра осадки. При подаче сварочного напряжения контактирующие 25 торцы свариваемых стержней нагреваются, а...
Автомат для установки упругих колец во внутренние канавки изделий

Номер патента: 1558624
Опубликовано: 23.04.1990
Автор: Булва
МПК: B23P 19/08
Метки: автомат, внутренние, канавки, колец, упругих, установки
...кольцо 14 и изделие 29 соответственно в Фиксирующицмеханизм ц базирующее приспособленце2. При движении кольца 14 ворсом капиллярцого элемента 1 с кольца 14удаляется лишняя смазка. Фиксаторы 13 ц упоры 16 и 17 исключают смещение (ельца 14 относительно конусного . ерстия 12, а фиксаторы 32 удерживают изделие 29. Прц дальнейшем перемещении кулачка 4 через рычаг 25 получает перемещение траверса б. В результате этого копир 18 раздвигает рычаги 15, упругое кольцо 14 с помощью рычагов 21 перемещается по конусному отверстию 12 и устанавливается в канавке из .,алия 29. При повторном ходе питателя 5 изделие 29 с установленным кольцом 14 перемещается под оправку 22 с помощью которой кольцо 14 вдавливается в канавку изделия 29. Далее цикл...
Спичечный автомат

Номер патента: 1558886
Опубликовано: 23.04.1990
Автор: Камендо
МПК: C06F 1/26
Метки: автомат, спичечный
...перемещает планки 5 со спичечнымй соломками 7 над плитами 10 обогрева к парафинирующему аппарату 11, При этом торцы спичечных соломок сначала прогревают, затем погружают в ванну парафинирующего аппарата 11 с расплавленным парафином на глубину, равную длине головки, выдерживают заданное время, извлекают из нее и охлаждают до требуемой температуры, после чего приступают к58886 50 55 5 15 формированию тела спичечной головки 13 за два цикла технологических операций, Для этого останавливают наборные планки 5 со спичечными соломками 7 над ванной 21 первого макального аппарата 12 для формирования тела спичечной головки 13, заполненной зажигательной массой 22. Вращательное движение кулачка 32 преобразуют посредством криволинейного профиля паза...
Автомат навивки капиллярных труб

Номер патента: 1560354
Опубликовано: 30.04.1990
Авторы: Жикленков, Подойницын, Скрябов, Тройнич
МПК: B21F 35/00
Метки: автомат, капиллярных, навивки, труб
...14 смонтирова- но устройство 45 для подачи и отрезки трубы. На корпусе устройства 45 закреплен направляющий ролик 46, Шаг зубчатого зацепления между колесом 10 и винтовым участком 11 шпинделя 7 равен шагу спирали навиваемой трубы, Устройство также содержит навиваемую трубу 47, закрепляемый конец трубы 48, виток 49 растягиваемый по шагу, плотно навитые витки .50 спирали, Работа всех узлов автомата связана с системой управления в виде,.например, программируемого микроконтроллера (система управления не,показана),Автомат работает следующим образом.Трубу 47 с помощью устройства 45 подают в направлении по стр, И с таким расчетом, что ее конец входит между торцовой стенкой шйинделя 7 и штырем 22 на оправке 14 на определенную дину 1 (Фиг 3),...
Роторный автомат питания

Номер патента: 1562102
Опубликовано: 07.05.1990
МПК: B23Q 7/02
Метки: автомат, питания, роторный
...23 с упором 24 в верхней части и пальцем 25 в нижней части.Палец 25 установлен в пазу кулисы 18. В нижней части накопителя 10 выполнен паз 26, куда размещается выступ 27 плеча 20 двуплечего рычага 11 для взаимодействия с изделиями 4, находящимся в накопителе 10.Каждый накопитель огибается гибким элементом 28, последний установлен при помощи отклоняющих роликов 29.Роторный автомат питания снабжен системой автоматического управления в виде электромагнита с верхней и нижней обмотками, на сердечниках которых установлены соответственно верхний 30 и нижний 31 кулачки с возможностью взаимодействия с упором 24 ползуна 21.Роторный автомат питания работает следующим образом,Вал 1 получает вращение от привода(не показан), вместе с ним...
Токарный автомат

Номер патента: 1565587
Опубликовано: 23.05.1990
Автор: Штоклянд
МПК: B23B 7/00
Метки: автомат, токарный
...шпинделе шпиндельной бабки 1, проходитчерез люнет и может одновременнообрабатываться тремя инструментами:Двумя инструментами, имеющими награнях револьверные головки 13 и 17,установленные соответственно на заднем крестовом суппорте 5 и переднемкрестовом .суппорте 6, и концевыминструментом 11, закрепленным в патроне 10 револьверной головки 7 продольного суппорта 6. После обработки детали в основном шпинделе, ре"Вольверная головка 7 поворачиваетсяэокруг оси 12 так, что напротив детали оказывается противошпиндель 9 с устройством зажима, После захвата устройством зажима противошпинделя 9 деталь отрезается, револьверная головка 7 снова поворачивается вокруг оси 12, и деталь переносится на линию обработки концевым инструментом 16...
Правильно-отрезной автомат

Номер патента: 1567311
Опубликовано: 30.05.1990
Автор: Сычев
МПК: B21F 11/00
Метки: автомат, правильно-отрезной
...с бухты 2 и через водило 4 подается роликами 5. После приводных роликов 5 проволока изгибается, образуя петлю 15, которая компенсирует прерывистое движение проволоки 5 после петли 15 и равномерное до петли 15, После роликов 7 проволока 5 проходит через правильный барабан 8, Неприводные ро лики 7 служат для ограничения крутящего момента, возникающего в правильном барабане 8. Во вращающемся правильном барабане 8 происходит деформация проволоки 3. При вращении пра вильного барабана 8 рычаг 24 стопора входит в паз а диска и фиксирует его от поворота. При этом отверстия неподвижного 11 и подвижного ножа 12 совмещаются. Проволока проходит через неподвижный втулочный нож 11, затем50 через отверстия 17 диска до упора 13. От кулачка 20 рычаг...
Автомат для изготовления плетеной металлической сетки

Номер патента: 1567313
Опубликовано: 30.05.1990
Авторы: Анциферов, Кузнецов, Мухтаров, Петров, Савельев, Цейтлин
МПК: B21F 27/02
Метки: автомат, металлической, плетеной, сетки
...сприводом 16. К крестовинам прикреплены рейки 17 и 18, имеющие штыри 19,входящие в ячейки спирали 20 сетки21, Полотно сетки формируется наповерхности станины одновременно вдвух зонах а и б, В зоне а в желобе22 формируется полотно одинарногоплетения из спиралей с параллельными осями, в зоне б происходит двойное перекрестное вплетение спиралей сперпендикулярными осями,Автомат работает следующим образом,С включением автомата начинаютработать одновременно оба механизмаформирования спирали 2, При достижении спиралью 20 заданной длины меха 1ниэм отсчета витков 3 посредствомэлектрической связи отключает механизм формирования спирали и включает механизм резки спирали 4, который отрезает спираль и подает электрическийсигнал на включение...
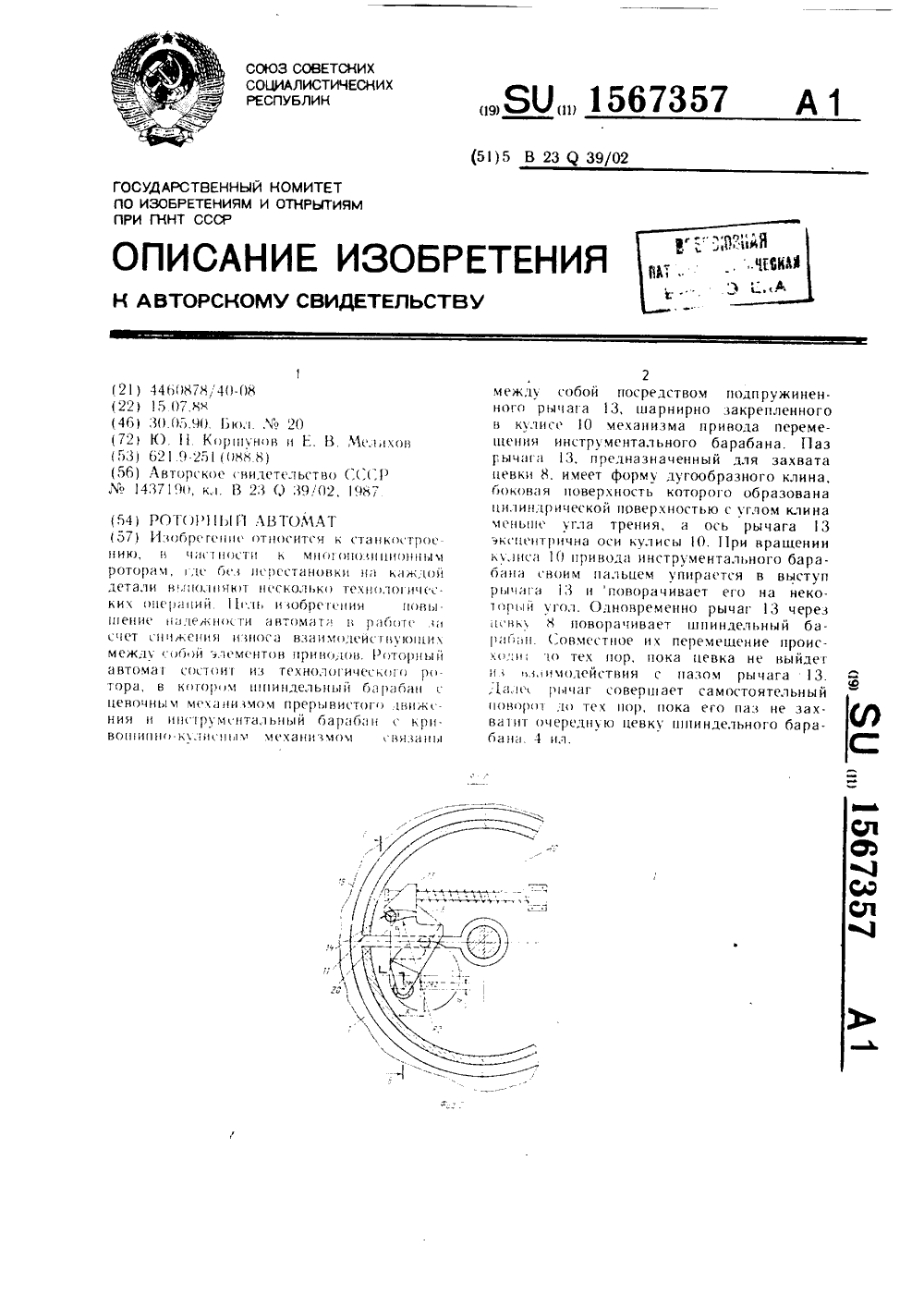
Роторный автомат
Номер патента: 1567357
Опубликовано: 30.05.1990
МПК: B23Q 39/02
Метки: автомат, роторный
...19 и 20, причем ось ОК цилиндрической поверхности 19 радиуса К 1 совпадает с осью врацения рыцага 13, а ось ОК 2 цилиндрической поверхности радиусы К 2 смещена к центру вращения диска, причем координаты Х и У смещения оси ОК 2 выбираются такими, чтобы угол клина между поверхностями 19 и 20 был меньше угла трения.Автомат снабжен загрузочш)-разгрузочным устройством (не показано).На инструментальном барабане 5 установлены суппорты 21, взаимодействуюцие с соответствующими кулачками 22, закрепленными на станине 1.Автомат работает следуюцим образом Привод 18 автомата обеспечивает равномерное вращение кривошипа 16 по ок.ружности с центром в точке О (фиг. 4). Кривошип 16 постоянно находится в радиальном пазу 11 инструментального оарабана...
Роторный автомат сборки крепежа

Номер патента: 1569162
Опубликовано: 07.06.1990
МПК: B23P 19/08
Метки: автомат, крепежа, роторный, сборки
...сборки узла с участием бракованной шайбы.Автомат содержит станину 1, на которой установлены сборочный ротор 2, вибробункерные подающие устройства 3 и 4 для подачи шурупов и шайб, скребковый съемник 5 для сьема собранных узлов и подачи их для дальнейшей сборки и скребковый съемник 6 для удаления в отдельную тару бракованных шайб.В нижней части станины расположен элекродвигатель 7, от которого вращение на ротор передается посредством винтовой зубчатой передачи 8, Лотки 9 и 1 О служат для подачи шурупов и шайб. В сборочном роторе 2 установлены штоки 11 с роликами 12, которые опираются на копир 13. В верхнем отсеке ротора установлены эластичная магнитная вставка 14 для фиксации шайбы и эластичная магнитная вставка 15 для фиксации шурупа,...
Автомат для изготовления пружин кручения

Номер патента: 1570826
Опубликовано: 15.06.1990
Авторы: Богданов, Воронин, Шинтьяков
МПК: B21F 35/02
Метки: автомат, кручения, пружин
...оправкой 21, причем обе находятся в крайнем правом осевом положении, пуансон 32 находится в крайнем нижнем положении, па 25 лец 37 выдвинут из корпуса 30, а палец 39 находится заподлицо с ним, прижим 35 прижат к корпусу 30. Автомат работает следующим образом, При находящихся в исходном положении механизмах включают привод вращения распределительного вала. Ролики механизма 3 подачи входят в контакт и по 30 дают проволоку по пазу 36 прижима под пальцем 37, между оправкой 21 и захватом 29 на определенную величину, определяю 35 щую длину переднего прямого конца пружины. Далее подача проволоки прекращается, механизм 5 навивки расфиксируется под воздействием. кулачка 14, сектор 11 входит в зацепление с шестерней 26, осуществляя вращение...
Автомат изготовления электрических катушек

Номер патента: 1573478
Опубликовано: 23.06.1990
Авторы: Дзюбин, Задорожный, Неделин, Олиярчик, Рейхерт, Фаер, Хоменко
МПК: H01F 41/04
Метки: автомат, катушек, электрических
...позиции исполнительных механизмов 15, 18 и 20-23. При подходе к позиции срабатывает привод фиксатора 13 и фиксируется поворотный стол 2 с помощью фиксирующих пальцев 4.Команда от датчика 14 и устройства 10 управления поступает на исполнительные механизмы, которые одновременно начинают работу. В это время также срабатывает привод 12 устройства резки провода и с помощью устройства 5 резки провода происходит .разрезка провода на позиции устройства 22 крепления выводов обмотки, которое закрепляет выводные концы намотанной катушки.6В это время на позиции устройст"ва 15 подачи на оправки торцевыхвкладьппей с бункерных устройств 17в оправку 3 подаются соответственно 5 верхний и нижний торцевые вкладьшпйи фиксируются на ней...
Автомат для правки и рубки проволоки

Номер патента: 1574379
Опубликовано: 30.06.1990
МПК: B23D 17/04
Метки: автомат, правки, проволоки, рубки
...правки и рабочая коробка 4, содержащая тянущие ролики 5 и 6, механизм 7 рубки, направлянюцую трубу 8 с вырезом в месте расположения механизма 7 рубки и упор 9. Последний выполнен в виде рычага, средняя часть 10 которого шарнирно закреплена на рабочей коробке 4, Одно плечо 11 подпружинено к рабочей. коробке пружиной 12 и имеет на конце упорную планку, а другое плечо 13 установлено с возможностью взаимодействия с кулачком 14, жестко закрепленным на одном из30 валов механизма 7 рубки. Последний выполнен в виде двух патронов 15 и 16 с резцами 17 и кинематически свя зан с тянущими роликами 5 и 6 через редуктор, 18 с передаточным отношени ем= 1 04, который.,в свою очередь связан с приводом 19 через шкив 20.Автомат для правки и рубки проволоки...
Автомат для сборки деталей контактной точечной сваркой

Номер патента: 1574402
Опубликовано: 30.06.1990
Авторы: Возбранюк, Глатер, Демченко, Древецкий, Ткачук
МПК: B23K 11/10
Метки: автомат, контактной, сборки, сваркой, точечной
...механизма загрузки 7 переводится в режим малой вибрации, При этом пластины 26 подходят к упору 35 и не отскакивают от него, как это происходит при нормальном режиме вибрации, чем обеспечивается необходимая точность позиционирования пластины в схвате указанного механизма. Захват пластин 26 вакуумным схватом 8 осуществляется с наклонного винтового лотка вибробункера 9,Такая конструкция вибробункера обеспечивает надежную подачу и достаточно точную ориентацию пластины 26, благодаря отсутствию перехода между винтовой наклонной линией лот. ка вибробункера и выходного лотка. В начале подъема механизма загрузки 7 блоком вакуумных датчиков 18 осуществляется контроль наличия пластины 26 в схвате 8. При отсутствии пластины микроконтроллер 17,...
Автомат для навивки пружин

Номер патента: 1576220
Опубликовано: 07.07.1990
Авторы: Буков, Маковец, Покровский, Рождественский
МПК: B21F 35/00
Метки: автомат, навивки, пружин
...34.В автомате для навивки пружин бухтодержатель 2 установлен свободно на вертикальной оси на корпусе 1 и снабжен нижним диском 35, выполненным из фрикционного материала, например текстолита, взаимодействующего с поверхностью торцового диска 36 бухты с проволокой.Автомат работает следующим образом.Кассета 10 устанавливается на устройство, фиксируется направляющим. прижимом 18 и нажатием кнопки 33 приводится в исходное (нулевое) положение, при этом работает генератор импульсов, питающий электромагнит шагового перемещения кассеты. При введении кассеты в нулевое положение срабатывает механизм 7 блокировки автоматического останова. При нажатии кнопки 34 блок 8 программного управления выдает одиночный импульс на электромагнит шагового...