Роторный автомат
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
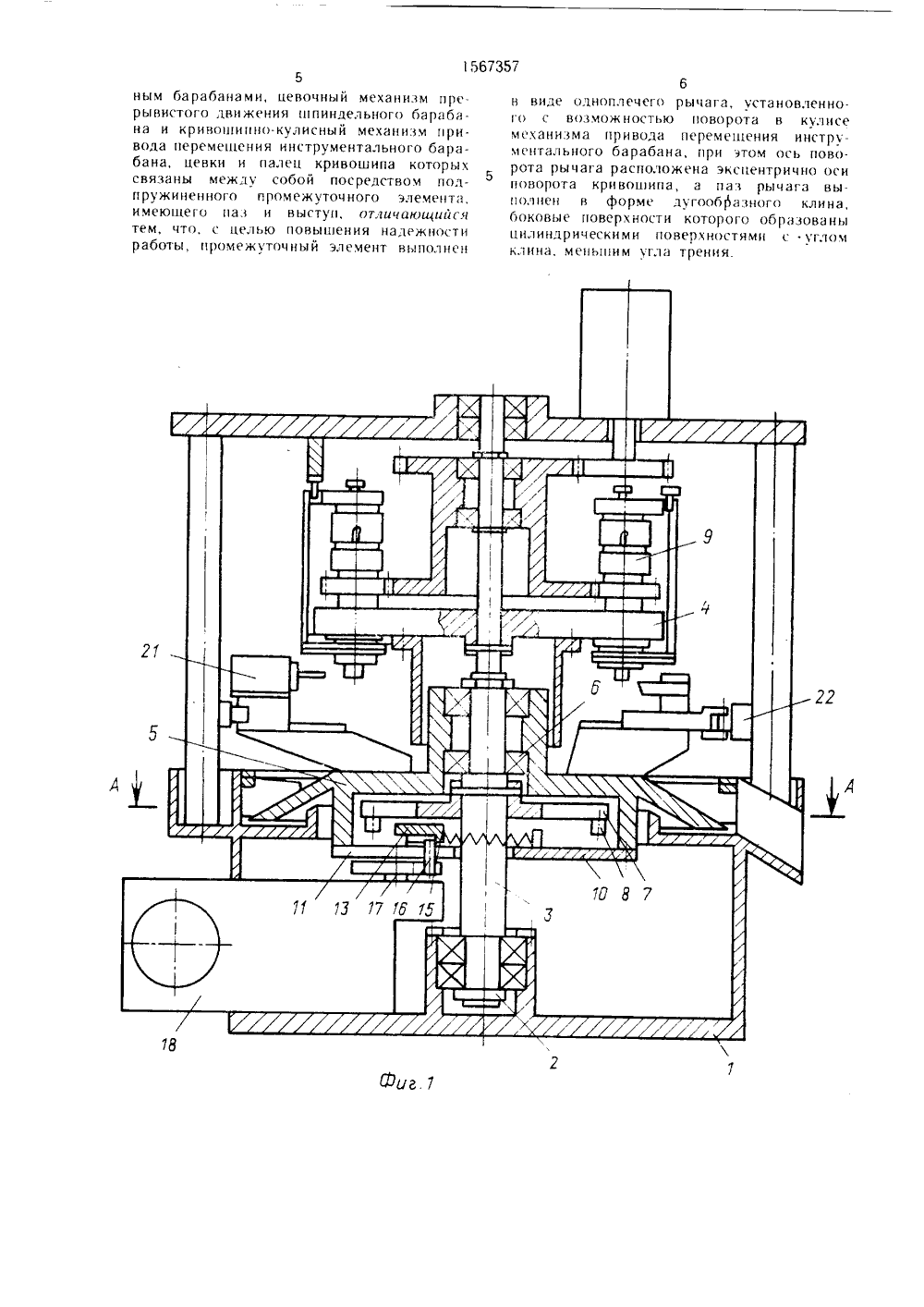
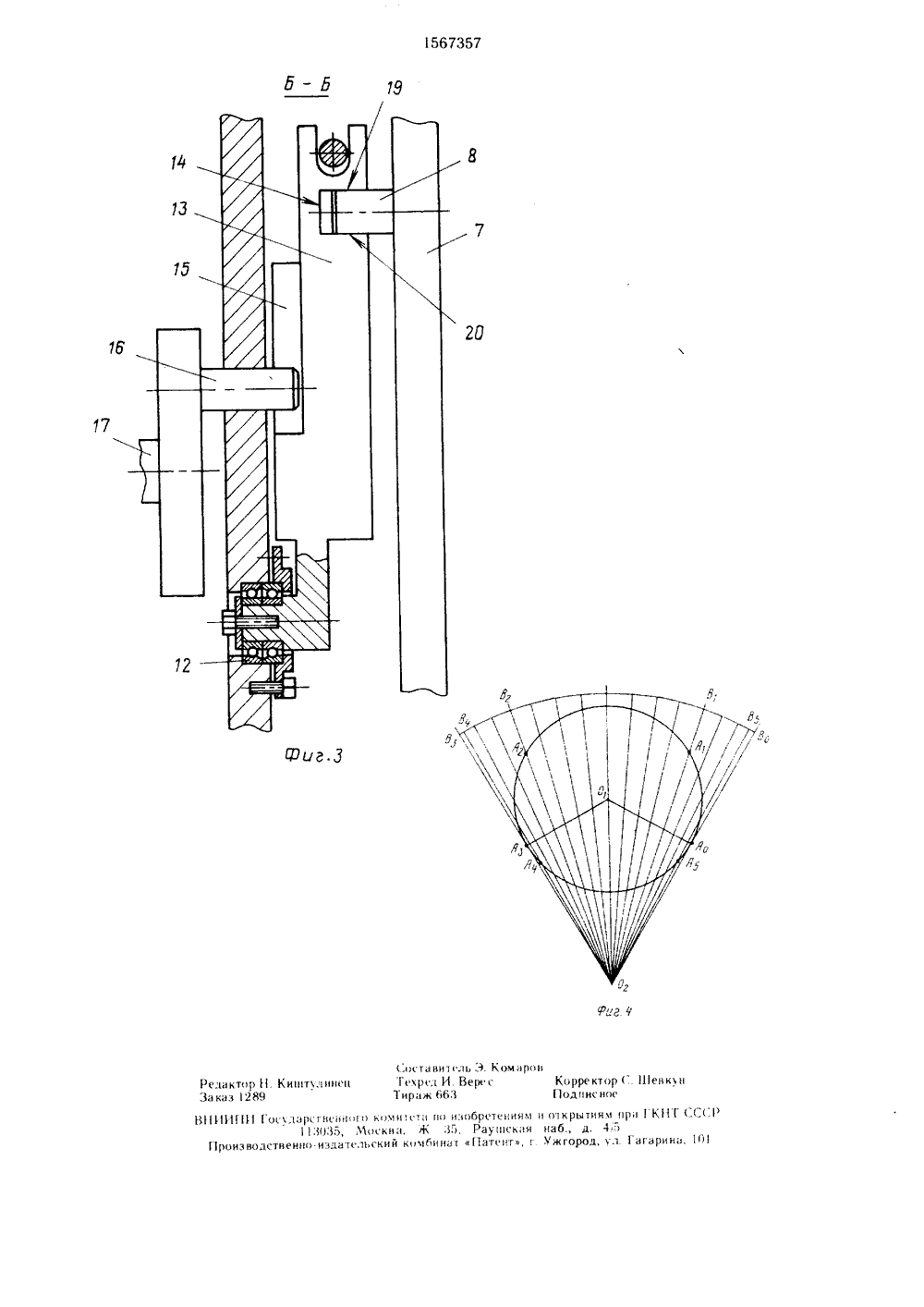
,51 Л ХО ьство О,Г.Р 9/02, 1,)8 4) РОТ111)(Г( АВТОМЛ СЛ ГОСУДАРСТВЕННЫИ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР ВТОРСКОМУ С 8 ИДЕТЕЛЬСТВУ(57) Изобргис Отисситя к стдикостроен ик), ч 1" ИОти к ми ООпс)зи ци)1 ы х 1 роторам, г;с 6 з престдновки пд каждой детали ,к).15 к)т нсколько тсхпс).1 Огичс.- ких Опс )пни. 11,11 и 10 бре г.ния пс)вь- шени),ж ности д тома; р дбосс сет нижеи 51 иИос д взаимо,исГукпих меж;)ъ О 6 ои злмс итон принс),)в. 1 Отс)р 1 й автомасостоит из технологического рс)- торы, в котор)х 1 шиндельный бдрдсдн с цевочным мхдиизмом прерывистого .ижс. ния и иптрумснтдльный бард 6;и с кри- ВОПИПНО-КУЛИСЪ МСХДНИЗМОМВЯЗДНЫ междх собой посредством подпружиненного рычага 13. шарнирно закрепленного в кулисе 10 меанизма привода перемецения инструментального барабана. Паз рычаг 13, предназначенный для захвата цевки 8, имеет форму дугообразного клина, 6 оковдя поверхность которого образована цилиндрической поверхностью с углом клина мныпс угла трения, а ось рычага 13 як цснтрична оси кулисы О. 1 ри вращении кх.сд 1 О привода инстрхментдл ного барабана своим пальцем упирастся в выступ рычага 3 и поворачивает его на некоторый угол. Одновременно рычаг 13 через ц кх 8 поворачивает шпиндельный бард 6;)и. (.овместное их перемещение происк)ли; О тех пор, пока невка не выйдет и )з,имодействия с пазом рычага 13. ,),д,с рЫЧдГ СОВЕрвдЕт СаМОСтОятЕЛЬНЫй псОрот до тех пор, пока его паз не захвдит Очередную цевку шпиндельного барабана. 4 ил.3Изобретение относится к станкострое, - нию, в частности к многопозиционным роторам, где требуется последовательное выполнение над одной деталью нескольких технологических операций без переустановки детали.Цель изобретения - повышение надежности работы.На фиг. 1 представлена конструктив. ная схема роторного автомата; на фиг. 2 - разрез А - А на фиг. 1; на фиг. 3 - разрез Б - Б на фиг. 2; на фиг. 4 схема движения инструментального барабана.Роторный автомат содержит станину 1, на которой установлен технологически й ротор 2, состояций из вала 3, шпиндель- ного 4 и инструментального 5 барабанов. Шпиндельный барабан 4 жестко соединен с валом 3, а инструментальный 5 установлен на валу 3 с помощью подшипников 6 с возможностью качательнох) движения.Внутри инструментального барабана 5 на валу 3 установлен диск 7 с равномерно расположенными по окружности цевками 8, количество которых равно числу шпинделей 9. Гнизу на инструментальном барабане 5 закреплена кулиса О, диск с радиальным пазом 11, на нем в полшипниковой опоре 12, например, с использованием дуплекс-пары для исключения зазоров установлен подпружиненный поворотный рычаг 13 с клиновым пазом 14. Рычаг 13 снабжен выступом 15, взаимодействующим с кривошипом 16, установленным на выходном валу 17 привода 8. Ось рычага 13 расположена эксцентрично оси поворота кривошипа 16.Кулиса 10 и кривошип 16 представяют собой кривошипно-кулисный механизм, а диск 7 с цевками 8 и подпружиненный поворотный рычаг 13 - цевоцный механизм прерывистого движения технологического ротора 2. Клиновой паз 14 рычага 13 образован двумя цилиндрическими поверхностями 19 и 20, причем ось ОК цилиндрической поверхности 19 радиуса К 1 совпадает с осью врацения рыцага 13, а ось ОК 2 цилиндрической поверхности радиусы К 2 смещена к центру вращения диска, причем координаты Х и У смещения оси ОК 2 выбираются такими, чтобы угол клина между поверхностями 19 и 20 был меньше угла трения.Автомат снабжен загрузочш)-разгрузочным устройством (не показано).На инструментальном барабане 5 установлены суппорты 21, взаимодействуюцие с соответствующими кулачками 22, закрепленными на станине 1.Автомат работает следуюцим образом Привод 18 автомата обеспечивает равномерное вращение кривошипа 16 по ок.ружности с центром в точке О (фиг. 4). Кривошип 16 постоянно находится в радиальном пазу 11 инструментального оарабана 5, поэтому последний совершает качательное движение в пределах угла ВО)Вь где Ог - ось технологического ротора, а ОгВч ОгВ и т. д. - положения оси паза 11.Одному циклу работы автомата соответствует один оборот кривошипа 16. В исходном положении криковип 16 находится в точке А, ось паза 11 - на луче ОгВО, рычаг 13 клиновым пазом 14 контактирует с одной из цевок 8 лиска 7, при этом шпиндельный 4 и инструментальный 5 барабаны соединены между собой. 1 ри врацении кривошипд 16 по дуге АА,А технологический ротор, как одно целоповорачивается на угол ВОгВг и в процессе этого движения суппорты 21, взаимодействуя с кулачками 22, совершает рабочий ход и обрабатывают зд отовки, утдновлные в шпинделях 9. Когда ось кривошид 16 достигает точки Ач технологический ротор 2 останавливается, затем при дальнейшем вращении кривошипа 16 и) дуге А.А он, взаимодействуя с выступом 15 рычага 1 выводит последний из конакта с цевкой 8 диска 7. В это время шпиндельный барабан 4 зафиксировдн от сдмнроизволь ного поворота полпружиннным фикдтором (и показан)При вращении кривопипа 16 по дуг А А)А инструментальный барабан 5 укоренно возврацдется в исходное оложение, затем при подходе оси кривошипа к точке А, рычаг 13 вводится в ко такт со следующей цевкой 8 11 ри достижении кривошипом 16 положения А сцепление ин струментального 5 и ппиндельного 4 барабанов заканчивается, следуе) новый цик. работы автомата.Выполнение внешней стороны 19 клинового паза в виде цилинлрицеской пг верх. ности с осью, совпадающей с осью поворота рычага 13, позволяет исклк)чить моменты сил относительно очки ОК 1, Возникаошие при вздимодйгвии ры ага 13 с цевкой 8 диска 7 при рабочем вращении ротора, когда шпиндельныи 4 и инстру ментальный 5 барабаны находятся в сцепленном со оянии, а также ком пенсировать износ поверхностей 19 и 20 в про цессе эксплуатации автомата, так как при этом расстояние между рдс тояние между точкой ОК 1 и центром цевки 8 дис ка 7, находяцейся в клиновом пазу 14 поворотного рычага 13, низменяется при изменении начальной ширины клинового паза 14. 55 Форму,га адоретения 5 10 15 20 25 30 35 40 45 50 Роторный автомат, содержащий технологический ротор с уста новленньми соосно друг другу шпиндельным и инструментдль5ным барабанами, цевочный механизм прерывистого движения шпиндельного барабана и кривошипно-кулисный механизм привода перемегцения инструментального барабана, цевки и палец кривошипа которых связаны между собой посредством подпружиненного промежуточного элемента, имеющего паз и выступ, отличающийся тем, что, с целью повышения надежности работы, промежуточный элемент выполнен в виде одноплечего рычага, установленного с возможностью поворота в кулисе механизма привода перемешения инструментального барабана, при этом ось поворота рычага расположена эксцентрично оси поворота кривошипа, а паз рычага выполнен в форме дугообразного клина, боковые поверхности которого образованы цилиндрическими поверхностями с углом клина, меньшим угла трения.567357 ОГД Редактор Н. КиштулинеЗаказ 1289 сгвенного колисто по изобретениям и открытиям нр К)1 Г О"(;1
СмотретьЗаявка
4460878, 15.07.1988
ПРЕДПРИЯТИЕ ПЯ В-8916
КОРШУНОВ ЮРИЙ НИКОЛАЕВИЧ, МЕЛИХОВ ЕВГЕНИЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: B23Q 39/02
Опубликовано: 30.05.1990
Код ссылки
<a href="https://patents.su/4-1567357-rotornyjj-avtomat.html" target="_blank" rel="follow" title="База патентов СССР">Роторный автомат</a>
Указатель поворота оси

Номер патента: 168777
Опубликовано: 01.01.1965
Авторы: Иностранец, Хорст
МПК: G01D 5/04, H01C 10/34
Метки: оси, поворота, указатель
...поворота оси, которые содержат установленный на оси полый цилиндр, снабженный выступом в форме зуба и входящим в зацепление с поворотным механизмом.В подобных указателях необходимо иметь весьма точно изготовленный поворотный механизм, что усложняет технологию их производства.Предложенный указатель поворота оси прост в изготовлении. Его полый цилиндр неподвижно соединен с осью; выступ в форме зуба расположен на наружной поверхности цилиндра; входящие в зацепление с зубом выемки захватывающего кольца размещены на внутренней поверхности захватывающего кольца поворотного механизма. Кроме того, в полом цилиндре под зубом имеется выемка, в которую при повороте оси входят выступы, расположенные на внутренней поверхности...
Указатель угла поворота оси

Номер патента: 245185
Опубликовано: 01.01.1969
МПК: G01D 13/10, H03J 1/02
Метки: оси, поворота, угла, указатель
...паз 7. В него утапливается консоль 8 30 пружинного фиксатора 9. Пружинный поводок 2 входит в торцовые выемки 10 (см. фиг. 4) приводного кольца 11, противоположный торец которого имеет волнистую поверхность 12, соприкасающуюся с консолью 8 пружинного фиксатора 9.На оси (на чертежах не показана) установлен полый цилиндр 18 с кольцевой канавкой 14, удерживающей плоский пружинный рычаг 15 (см. фиг. 2), служащий арретиром.Указатель угла поворота оси. работает следующим образом.При повороте отсчетного диска 1 пружинный поводок 2 скользит по торцу кольцевого буртика 5, Достигнув впадины б, поводок под действием упругой силы опускается в торцовую выемку 10, увлекая за собой приводное кольцо 11, и поворачивает его до соседней позиции....
Прибор для определения угла поворота оси электрокардиограмм

Номер патента: 281891
Опубликовано: 01.01.1970
МПК: G06G 3/00
Метки: оси, поворота, прибор, угла, электрокардиограмм
...на фиг. 2 - цилиндрический барабан; на фиг, 3 - часть таблицы, помещенной на барабане.5Прибор содержит корпус 1, внутри которогона оси 2 помещен цилиндрический барабан 3.Барабан можно поворачивать с помощью рукоятки 4, сидящей на оси. В верхней части 10 корпуса имеются прорези б и б. Прорезь б служит для считывания значений углов поворота оси ЭКГ, помещенных в таблице, которая нанесена на наружной цилиндрической поверхности барабана (см. фиг. 3). В верхней строке 15 этой таблицы показаны значения величиныЯКЯ в правом отведении. В прорези б перемещается движок 7 с двумя стрелками 8 и 9.Рядом с прорезью б расположена таблица О, значений величин ЯКЯ в третьем отведении, 20 При пользовании прибором измеряют величину и знак ЯКЯ первого...
Устройство для автоматического поворота оси

Номер патента: 37531
Опубликовано: 30.06.1934
Автор: Коробочкин
МПК: G01B 7/30
...диск в на правлении, указанном пунктирной стрелкой. По предыдущему вращение диска будет продолжаться до тех пор, пока двойная стрелка не остановится против щетки 2. ПредметУстройство дворота оси изугол не свышеприменением дисоси двигателя и(28 ВТОРСНОЕ СВ Предлага мое изобретение относится к устройствам для автоматического поворота оси из любого положения на угол не свыше 180 и заключается в том,что управляющий поворотом диск, независимо от направления вращения связанного с ним двигателя, автоматически приходит в положение, определяемое соответствующим реле,На чертеже изображена электрическая схема предлагаемого устройства, состоящего в основном из закрепленного на оси двигателя диска А, снабженного двумя изолированными друг от друга...
Устройство для алгебраического суммирования углов поворота осей с неограниченным вращением

Номер патента: 55991
Опубликовано: 01.01.1939
Автор: Гинзбург
МПК: H02K 24/00
Метки: алгебраического, вращением, неограниченным, осей, поворота, суммирования, углов
...поворота этих изме. рителей. Очевидно, что если направление вращения измерителей будет противоположно, то моторчик повернется на угол, равный разности углов поворота измерителей, При одновременном вращении трех или более измерителей система будет действовать совершенно аналогично и моторчик будет поворачиваться на угол, равный алгебраической сумме углов поворота измерителей, т.е. вращаться со скоростью, равной алгебраической сумме скоростей вращения измерителей, Направление вращения моторчика определяется знаком суммы,В том случае, когда необходимо получить не суммарный угол поворота или скорость вращения, а суммарное число или яастоту импульсов, вместо моторчика может быть включено поляризованное реле (как это показано на фиг....
Предыдущий патент: Загрузочное устройство
Следующий патент: Автоматическая линия
Случайный патент: Устройство для подсчета икры рыб