Манипулятор с программным управлением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
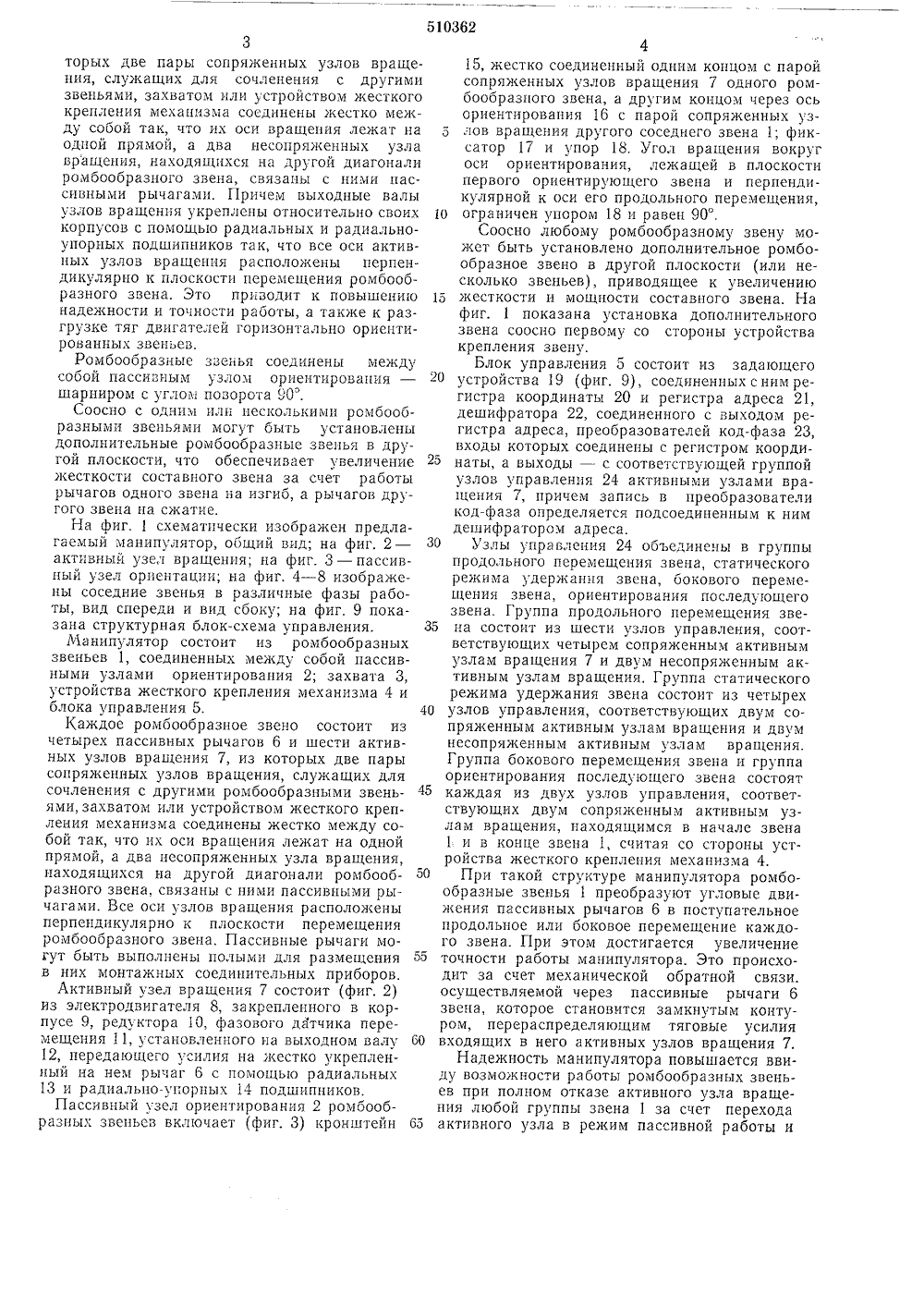
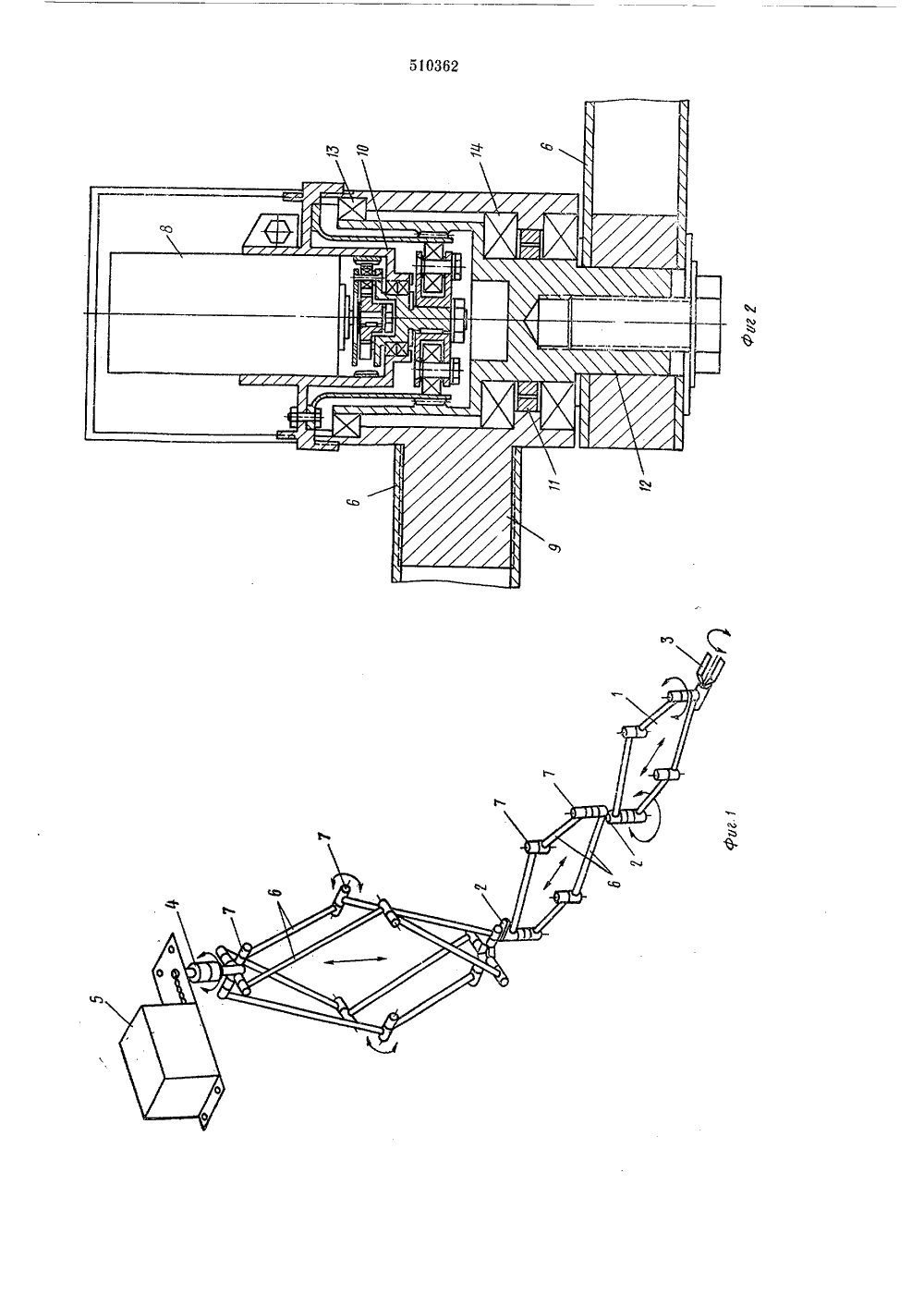
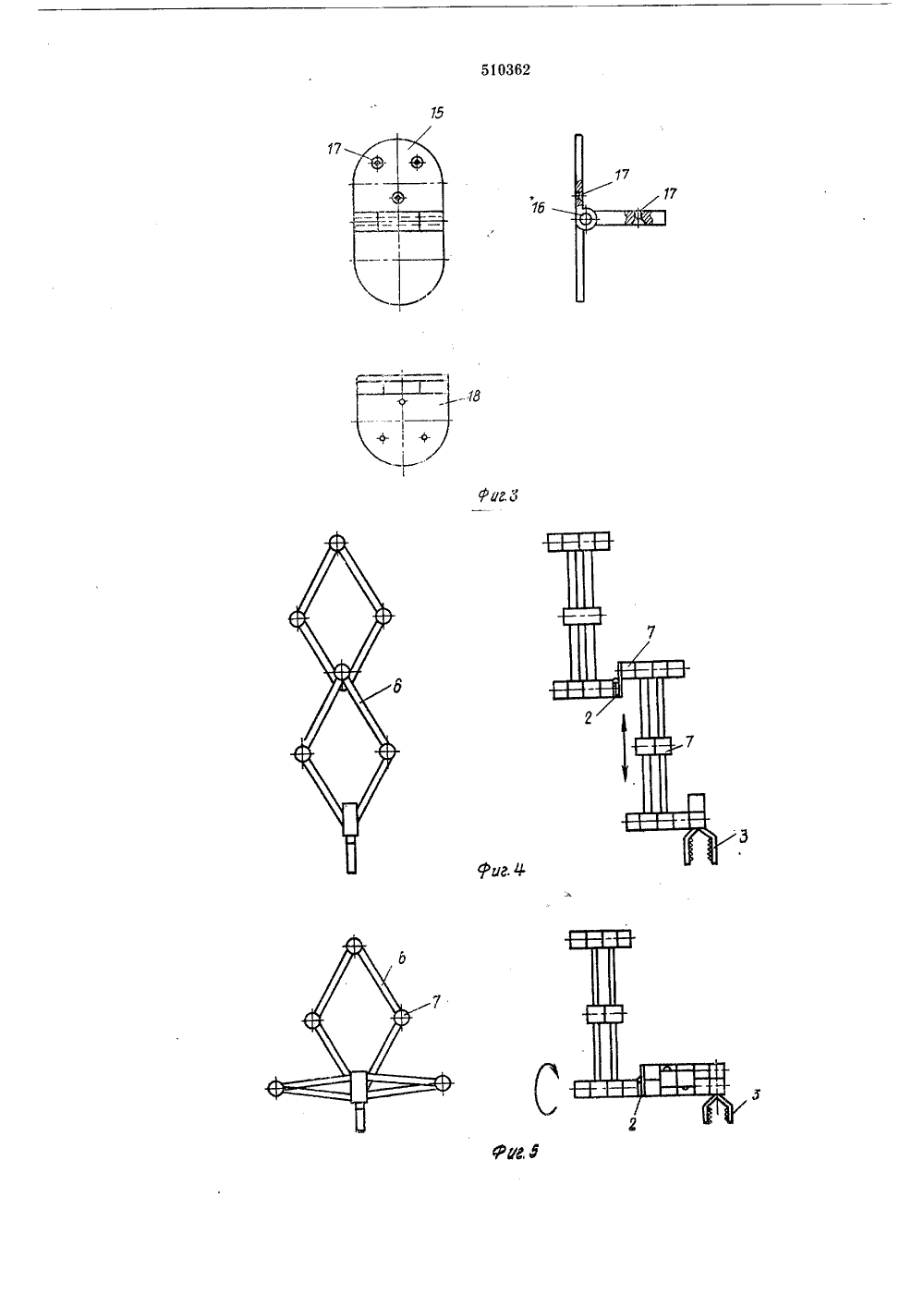
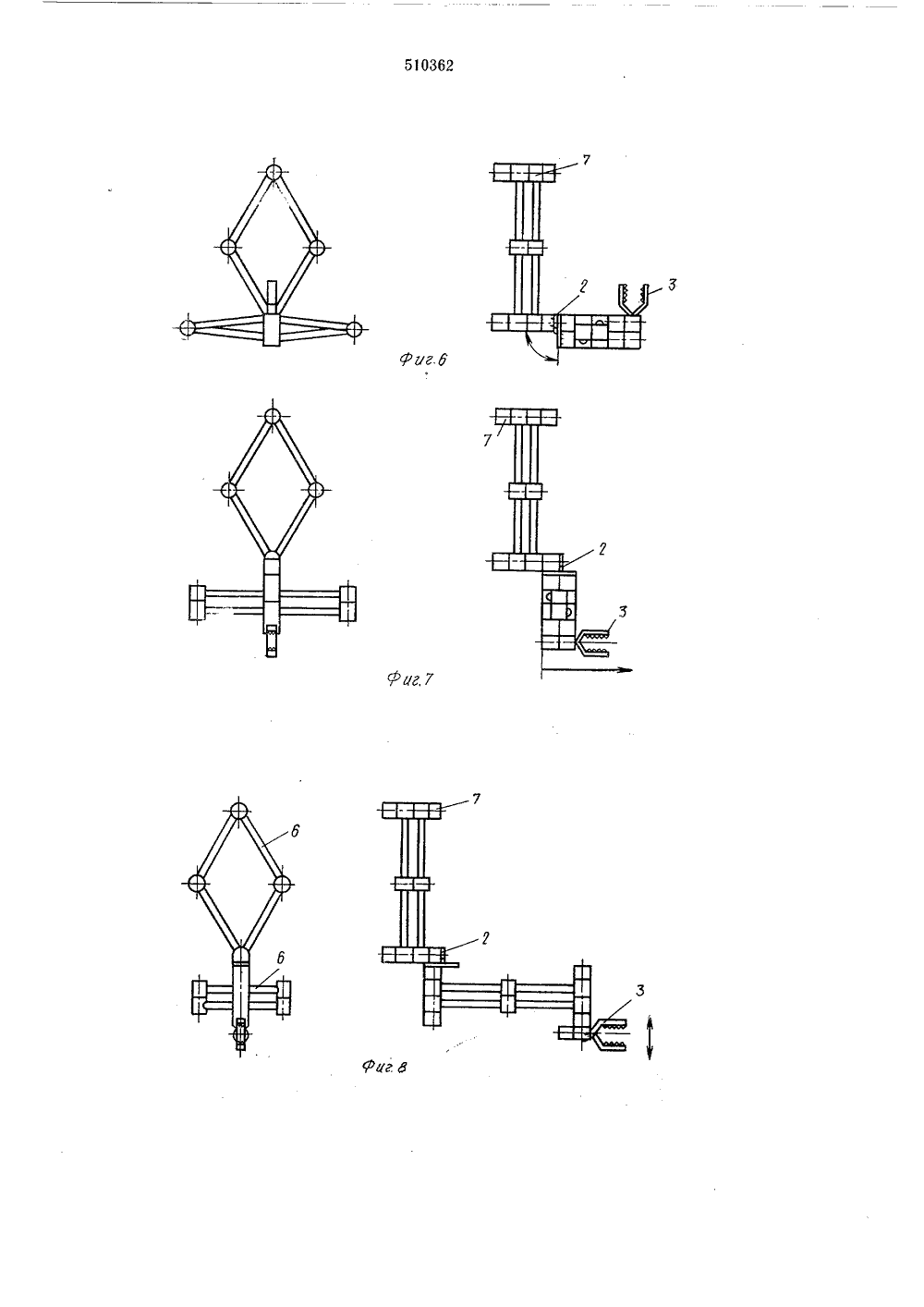
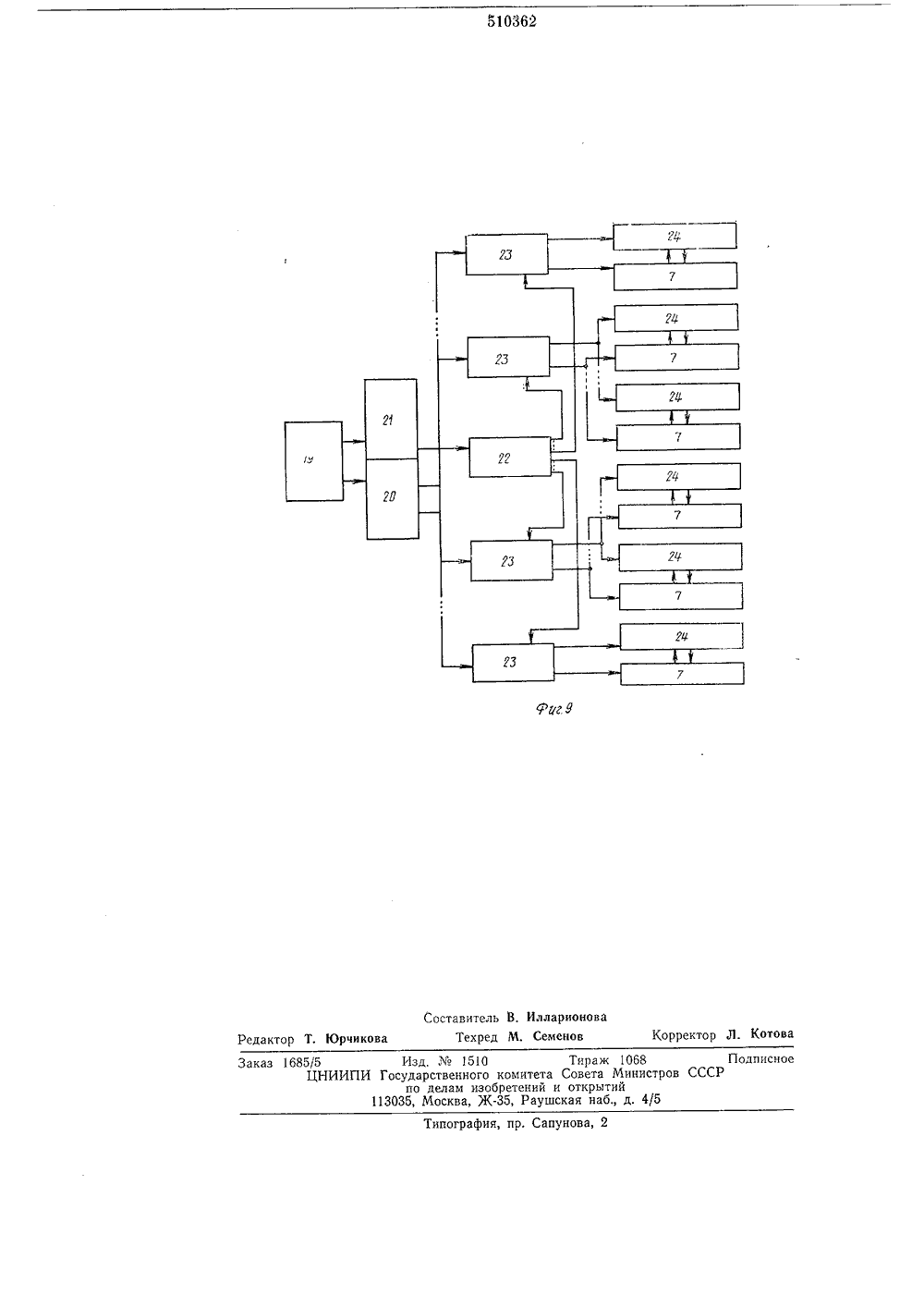
ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ и 11 510362 Совэ Советских Социалистических Республик61) Зависимое от авт. свидетельства22) Заявлено 13,12,72 (21) 1856766/25-8 51) М, Кл, В 25 9 присоединением заявкиГосударственный комитет Совета Министров СССР по делам изобретений(53) крытии ания описания О 6.08,7(54) МАНИПУЛЯТ игателей большей ей прочности, что твенного веса маМанупулятор может быть применен как промышленный робот для автоматизации работ в опасной или труднодоступной среде, сборки или механической обработки изделий.Известны манипуляторы с программным управлением, включающие захват, устройство жесткого крепления и механизм перемещения, который содержит различные узлы перемещения и вращения. Каждый узел перемещает свой пассивный рычаг в строго определенной плоскости. Блок управления узлами перемещения и вращения содержит соответствующие им автономные контуры автоматического регулирования соответствующих двигателей. При этом зона обслуживания и гибкость механизма манипулятора определяется числом активных узлов перемещения и вращения, их мощностью и длиной рычагов,Недостаток известных манипуляторов - повышенные требования к надежности и точности отдельных узлов механизма перемещения и блока управления, Выход из строя любого из узлов приводит к полной потере работоспособности манипулятора, а неточная работа любого отдельного узла приводит к эквивалентному снижению точности работы манипулятора в целом. Кроме того, такие манипуляторы имеют низкий коэффициент использования каждого двигателя узла. При этом увеличении зоны обслуживания достигается за счет применения двмощности и рычагов большприводит к увеличению собснипулятора.5 Целью изобретения является увеличение надежности и точности работы устройства, уменьшение воздействия крутящего момента иа тяги узлов вращения при их работе в горизонтальной плоскости, обеспечение возмож ности использования одного и того же ззсиакак для продольного перемещения в вертикальной плоскости, так и для продольного и бокового перемещений в горизонтальной плоскости, увеличение жесткости и мощности от дельного звена без применения рычагов большей прочности и двигателей узла вращения большей мощности, уменьшение числа задаваемых координат по сравнению с числом актиьных узлов вращения, уменьшение числа эле ментов блока управления и упрощение программного управления, а также унификация и упрощение конструкции за счет применения однотипных звеньев, узлов вращения, узлов управления и рычагов.25 Согласно изобретению указанная цель достигается тем, что механизм вертикального и горизонтального перемещений выполнен в виде ромбообразных звеньев, представляющих собой систему четырех пассивных рыча- ЗО гов и шести активных узлов вращения, из ко510362 торых две пары сопряженных узлов вращения, служащих для сочленения с другимизвеньями, захватом или устройством жесткогокрепления механизма соединены жестко между собой так, что их оси вращения лежат наодной прямой, а два несопряженных узлавращения, находящихся на другой диагоналиромбообразного звена, связаны с ними пассивными рычагами. Причем выходные валыузлов вращения укреплены относительно своихкорпусов с помощью радиальных и радиальноупорных подшипников так, что все оси активных узлов вращения расположены перпендикулярно к плоскости перемещения ромбообразного звена. Это приводит к повышениюнадежности и точности работы, а также к разгрузке тяг двигателей горизонтально ориентированных звеньев.Ромбообразные ззенья соединены междусобой пассизным узлом ориентировапия -шарниром с углом позорота 90,Соосно с одним или несколькими ромбообразными звеньями могут быть установленыдополнительные ромбообразные звенья в другой плоскости, что обеспечивает увеличениежесткости составного звена за счет работырычагов одного звена на изгиб, а рычагов другого звена на сжатие.На фиг, 1 схематически изображен предлагаемый манипулятор, общий вид; на фиг, 2 -активный узел вращения; на фиг. 3 - пассивный узел ориентации; на фиг. 4 - 8 изображены соседние звенья в различные фазы работы, вид спереди и вид сбоку; на фиг, 9 показана структурная блок-схема управления.Манипулятор состоит из ромбообразныхзвеньев 1, соединенных между собой пассивными узлами ориентирования 2; захвата 3,устройства жесткого крепления механизма 4 иблока управления 5. 4Каждое ромбообразное звено состоит изчетырех пассивных рычагов 6 и шести активных узлов вращения 7, из которых две парысопряженных узлов вращения, служащих длясочленения с другими ромбообразными звеньями, захватом или устройством жесткого крепления механизма соединены жестко между собой так, что их оси вращения лежат на однойпрямой, а два несопряженных узла вращения,находящихся на другой диагонали ромбообразного звена, связаны с ними пассивными рычагами. Все оси узлов вращения расположеныперпендикулярно к плоскости перемещенияромбообразного звена. Пассивные рычаги могут быть выполнены полыми для размещения 5в них монтажных соединительных приборов.Лктивный узел вращения 7 состоит (фиг. 2)из электродвигателя 8, закрепленного в корпусе 9, редуктора 1 О, фазового датчика перемещения 11, установленного на выходном валу 512, передающего усилия на жестко укрепленный на нем рычаг 6 с помощью радиальных13 и радиально-угорных 14 подшипников,Пассивный узел ориентирования 2 ромбообразных звеньев включает (фиг. 3) кронштейн бд 415, жестко соединенный одним концом с парой сопряженных узлов вращенияодного ромбообразного звена, а другим концом через ось ориентирования 16 с парой сопряженных уз 5 лов вращения другого соседнего звена 1; фиксатор 17 и упор 18. Угол вращения вокруг оси ориентирования, лежащей в плоскости первого ориентирующего звена и перпендикулярной к оси его продольного перемещения, 10 ограничен упором 18 и равен 90.Соосно любому ромбообразному звену может быть установлено дополнительное ромбообразное звено в другой плоскости (или несколько звеньев), приводящее к увеличению 15 жесткости и мощности составного звена. Нафиг. 1 показана установка дополнительного звена соосно первому со стороны устройства крепления звену.Блок управления 5 состоит из задающего 20 устройства 19 (фиг. 9), соединенных сним регистра координаты 20 и регистра адреса 21, дешифратора 22, соединенного с выходом регистра адреса, преобразователей код-фаза 23, входы которых соединены с регистром коорди наты, а выходы - с соответствующей группойузлов управления 24 активными узлами вращения 7, причем запись в преобразователи код-фаза определяется подсоединенным к ним дешифратором адреса.З 0 Узлы управления 24 объединены в группыпродольного перемещения звена, статического режима удержания звена, бокового перемещения звена, ориентирования последующего звена. Группа продольного перемещения зве на состоит из шести узлов управления, соответствующих четырем сопряженным активным узлам вращения 7 и двум несопряженным активным узлам вращения, Группа статического режима удержания звена состоит из четырех 0 узлов управления, соответствующих двум сопряженным активным узлам вращения и двум несопряженным активным узлам вращения.Группа бокового перемещения звена и группа ориентирования последующего звена состоят 5 каждая из двух узлов управления, соответствующих двум сопряженным активным узлам вращения, находящимся в начале звена 1 и в конце звена 1, считая со стороны устройства жесткого крепления механизма 4, 0 При такой структуре манипулятора ромбообразные звенья 1 преобразуют угловые движения пассивных рычагов 6 в поступательное продольное или боковое перемещение каждого звена. При этом достигается увеличение 5 точности работы манипулятора. Это происходит за счет механической обратной связи.осуществляемой через пассивные рычаги 6 звена, которое становится замкнутым контуром, перераспределяющим тяговые усилия 0 входящих в него активных узлов вращения 7.Надежность манипулятора повышается ввиду возможности работы ромбообразных звеньев при полном отказе активного узла вращения любой группы звена 1 за счет перехода активного узла в режим пассивной работы иперераспределения тяги на остальные активные узлы вращения группы.Ориентирование ромбообразных звеньев 1 в вертикальной или горизонтальной плоскости производится с помощью пассивного узла ориентирования 2. Предположим, что в первый момент времени какие-либо два соседних звена 1 ориентированы в вертикальной плоскости (фиг. 4). Для перевода, например, последнего звена с грузом в горизонтальную плоскость необходимо полнять груз (фиг. 5). Затем с помощью смежных узлов вращения 7 предыдущего звена 1 производится вращение последнего ориентируемого звена 1 на 180 (фиг. 6), после чего под действием собственного веса ориентируемого звена и веса перемещаемого тела ориентируемое звено принимает горизонтальное положение, развернувшись вокруг оси 16 на 90 (фиг, 7). На фиг. 8 показано положение объекта после продольного перемещения горизонтально ориентированного звена 1.Длина кронштейна 15 пассивного узла ориентирования 2 выбрана, исходя из того, чтобы центр тяжести перемещаемого обьекта после полного сокращения ориентируемых звеньев лежал ближе к оси вращения сопряженных узлов ориентирующего звена 1, что приводит к уменьшению длины плеча, образованного к моменту вращения ориентируемых звеньев, и, следовательно, к меньшей требуемой мощности, затрачиваемой сопряженными узлами ориентирующего звена.При переводе какого-либо одного промежуточного звена 1 из вертикального полокения в горизонтальное с соранением вертикальной ориентации последующего звена 1 производится вращение промежуточного ориентируемого звена в одном направлении на 180 при одновременном встречном вращении последующего звена тоже на 180.При переводе звена 1 из горизонтального положения в вертикальное с сохранением горизонтальной ориентации промежуточного звена 1 производится сжатие вссх звеньев, находяш хся в горизонтальном положении, и перевод их в другую плоскость, после чего осуществляется вращение ориентирусмого звена в одном направлении па 180 при одновременном встречном вращении про.дскуточного звена тоже на 180 лля сохранения его горизонтальной ориентации.Составное звено, состоящее из двух соосных ромбообразных звеньев 1, приводит как к увеличению мощности, так и к увеличению жесткости полученной конструкции составного звена за счет работы рычагов одного звена на изгиб, а рычагов другого на сжатие.Управление механизмом манипулятора осуществляется (фиг. 9) путем выдачи задающим6устройством 19 блока управления 5 кода координаты и адреса соответственно в регистр 20 и регистр 21, В зависимости от заданного адреса группы узлов вращения из регистра координаты 20 считывается информация в соответствующие преобразователи код-фаза 23, которые выдают информаци;о в соответствующие узлы управления 24. При этом в преобразователи код-фаза узлов управления, соответствующих сопряженным узлам вращения 7, информация передается прямым колом, а в преобразователи код-фаза узлов управления, соответствующих несопряксиным узлам вращения, - обратным кодом. сдвинутым на один разряд в сторону старших разрядов. Это возможно ввиду того, что максимальное число, записываемого в регистр координаты, выбрано соответствующим максимальному углу перемещения рычагов звена 1, равному 180, Поэтому при записи прямого кода Лв преобразователи код-фаза, соответствуюгцие сопряженным узлам вращения 7, в преобразователи код-фаза, соответствующие нссопряженным узлам 7, треснется записать код Л;,. определяемый как ИО=М; - 2 Х,Для реализации этого выражения достаточно с регистра координаты 20 снимать обратный кол, сдзинутый на один разряд в сторону старших разрядов,30 1. Манипулятор с программным управлением, многозвенная рука которого снабжена захватом и поворотно связана с основанием, несущим блок управления, о т л и ч а ю щ и й с я тем, что, с целью упрощения конструкции, каждое звено механической руки представляет собой четыре рычага, соединенных в виде ромба с помощью шести активных узлов вращения, из которых две паря сопряженных узлов вращения. сллкащих для соединения с другими звеньями, захватом или основанием, соединены между собой таким образом, что их осн вращения лежат па одной прямой, а два несопряженных узла вращения, находящихся на другой диагонали ромба, связаны с ними рычагами, причем выходные валы узлов вращения укреплены относительно своих корпусов с помощью радиальных и радиально-упорных подшипников так, что все оси активных узлов вращения расположены перпендикулярно к плоскости перемещения звена.2. Манипулятор по п. 1, отличающийся тем, что звенья механической ритки соединены шарнирами с углом поворота 90.3, Манипулятор по пп. 1 и 2, отличающи й с я тем, что одно или несколько звеньев выполнены сдвоенными таким образом, что одни рычаги работают на сжатие, а другие -на изгиб,35 40 45 50 5560 5 10 15 20 25 Ф ор мул а, из обретения510362 Составитель В, ИлларионоваРедактор Т. Юрчикова Техред М. Семенов Корректор Л. Кото аказ 1685/5ЦНИИП ПодписноеССР Типография, пр. Сапунов Изд, Мз 1510Государственного комитета по делам изобретений и 3035, Москва, Ж, Раушс Тираж 1068Совета Министровоткрытийая наб., д. 4/5
СмотретьЗаявка
1856766, 13.12.1972
ПРЕДПРИЯТИЕ ПЯ В-2190
ЖАРКОВ АНАТОЛИЙ АЛЕКСАНДРОВИЧ, ЕЛИСЕЕВ АНАТОЛИЙ НИКОЛАЕВИЧ, РАПОПОРТ ГЕОРГИЙ НАУМОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятор, программным, управлением
Опубликовано: 15.04.1976
Код ссылки
<a href="https://patents.su/7-510362-manipulyator-s-programmnym-upravleniem.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор с программным управлением</a>
Устройство для ограничения продольных перемещений рельсовых звеньев на платформе

Номер патента: 253106
Опубликовано: 01.01.1969
Авторы: Армавирский, Кокарев, Редчанский, Семененко, Тарубаров
Метки: звеньев, ограничения, перемещений, платформе, продольных, рельсовых
...состоит из неподвижно прикрепленной к полу платформы 1 станины 2, которая шарнирно связана с консолью 3, оканчивающейся демпферным механизмом 4, Станина и демпферный механизм соединены между собой посредством шарнирно-рычажной системы б ограниченного поворота, которая фиксируется в рабочем положении в шарнирах упорами б и пружиной 7, установленной на нижнем шарнире 8 и упирающейся в станину 2.Пружина обеспечивает постоянное доведение рычагов системы до упоров за счет вращения нижнего рычага 9 против часовой стрелки. Внутри корпуса демпферного механизма помещается резино-металлический поглощающий аппарат 10,Работа устройства осуществляется следующим образом.В момент заведения рельсового звена на платформу демпферный механизм...
Устройство для ограничения продольных перемещений рельсовых звеньев на платформе

Номер патента: 751678
Опубликовано: 30.07.1980
Авторы: Иванов, Кравченко, Рашрагович
МПК: B60P 7/12
Метки: звеньев, ограничения, перемещений, платформе, продольных, рельсовых
...на платформе содержит неподвижно прикрепленную к полу платформы 1 станину 2, которая шарнирно связана с консолью 3, оканчивающейся демпферным механизмом 4 с ручкой 5.Станина и демпферный механизм соединены между собой посредством шарнирно рычажной системы 6 ограниченного поворота, которая фиксируется в рабочем положении в шарнирах упорами 7 и пружиной 8, установленной на нижнем шарнире 9 и упирающейся в станину 2.Пружина обеспечивает постоянное дове. дение рычагов системы до упоров за счет вращения нижнего ры нага 10 против часовой стрелки. Внутри корпуса демпферного механизма помещается резино-металлический поглощающий аппарат 11.Ось 12 шарнира, соединяющего станину с консолью и расположенного ближе к краю платформы, с одной стороны...
Устройство для грубого и точного перемещений управляемого звена

Номер патента: 1241215
Опубликовано: 30.06.1986
Автор: Курак
МПК: G05G 9/04
Метки: грубого, звена, перемещений, точного, управляемого
...поворотомПВ и фиксацией ее относительно корпуса 1 другим винтом, 1 э.п, ф-лы, 4 ил. тановленной на резьбе в корпус э 1 свозможностью фиксации, причем червячное колесо 6 установлено междуконцевым буртом 16 общей оси 15 и корпусом 1, а полумуфта 5 снабжена размещенными по периферии зубьями 17 длясопряжения с зубьями, червячного колеса 6.Червячное колесо 6 выполнено в .виде прямозубой шестерни, червяк 8 -в виде цилиндрического винта, осьрезьбы которого наклонена к плоскости вращения червячного колеса под углом, равным углу подъема его резьбы,а пружина 18 с толкателем 19 рукоятки 2 грубого перемещения размещена вее осевом углублении 20, Фиксациянаправляющей 12 обеспечивается винтом21, а по,воротнойвтулки 10-винтом 22.Устройство...
Устройство для перемещения пакетов звеньев рельсового пути

Номер патента: 1802027
Опубликовано: 15.03.1993
Автор: Короткевич
МПК: E01B 29/02
Метки: звеньев, пакетов, перемещения, пути, рельсового
...вала 10 и смонтированных на его концах рычагов 13 с упорами через тяги 14 рельсовые упоры 6 опускаются и освобождают торцы рельсов нижних звеньев пакетов,После срабатывания механизма пакет готов для его последующего перетягивания к укладочному крану, Для освобокдения упоров данным механизмом требуются большие первоначальные сгартовые уси лия, которые обеспечиваются рычажнымусилителем и тяговой лебедкой.В исходном положении механизма кинематически блокируется путем упора рычагов 13 в основание подшипниковых опор иобратным смещением шарнира соединяющего рычаги 13 и тяги 14,Винтовые стяжки 18 служат для устранения зазоров между торцами рельсов и10 рельсовыми упорами 6 после погрузкизвеньев пакетов,Устройство для перемещения...
Трактор для подъема и перемещения рельсовых звеньев

Номер патента: 21201
Опубликовано: 31.07.1931
Автор: Белоцерковец
МПК: B66C 23/44, E01B 29/02
Метки: звеньев, перемещения, подъема, рельсовых, трактор
...сдвигу. во время работы служат собаЧки 10 маховиков 3- (фиг, 5).Приведение в действие лебедок 7 осуществляется общеизвестным способом от имеющегося мотора (фиг. 3). Рельсовые звенья, поднимаемые при .помощи лебедок 7, укладываются внутри П-образного рамного корпуса 1, 3 на .ряд этажно-расположенных консольных поперечин 17 (фиг. 1, 2, 3), которые могут поворачиваться через посредство снабженных зубчатками валов.15, приводимых в действие от руки маховиком 2. Подведение любой пары консольных поперечин под поднимаемыезвенья осуществляется путем сцепления находящейся при муфте 4 (фиг. 3) шестерни с валом 15, что достигается переводом соответствующего рычага. Другой конец поперечин 17 поддерживается соответствующими уголками, расположенными...
Предыдущий патент: Устройство для крепления рабочего инструмента
Следующий патент: Манипулирующее устройство
Случайный патент: Устройство для подачи длинномерных изделий в проемы зданий