Система управления буксировкой судов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1678695
Автор: Зубок

Текст
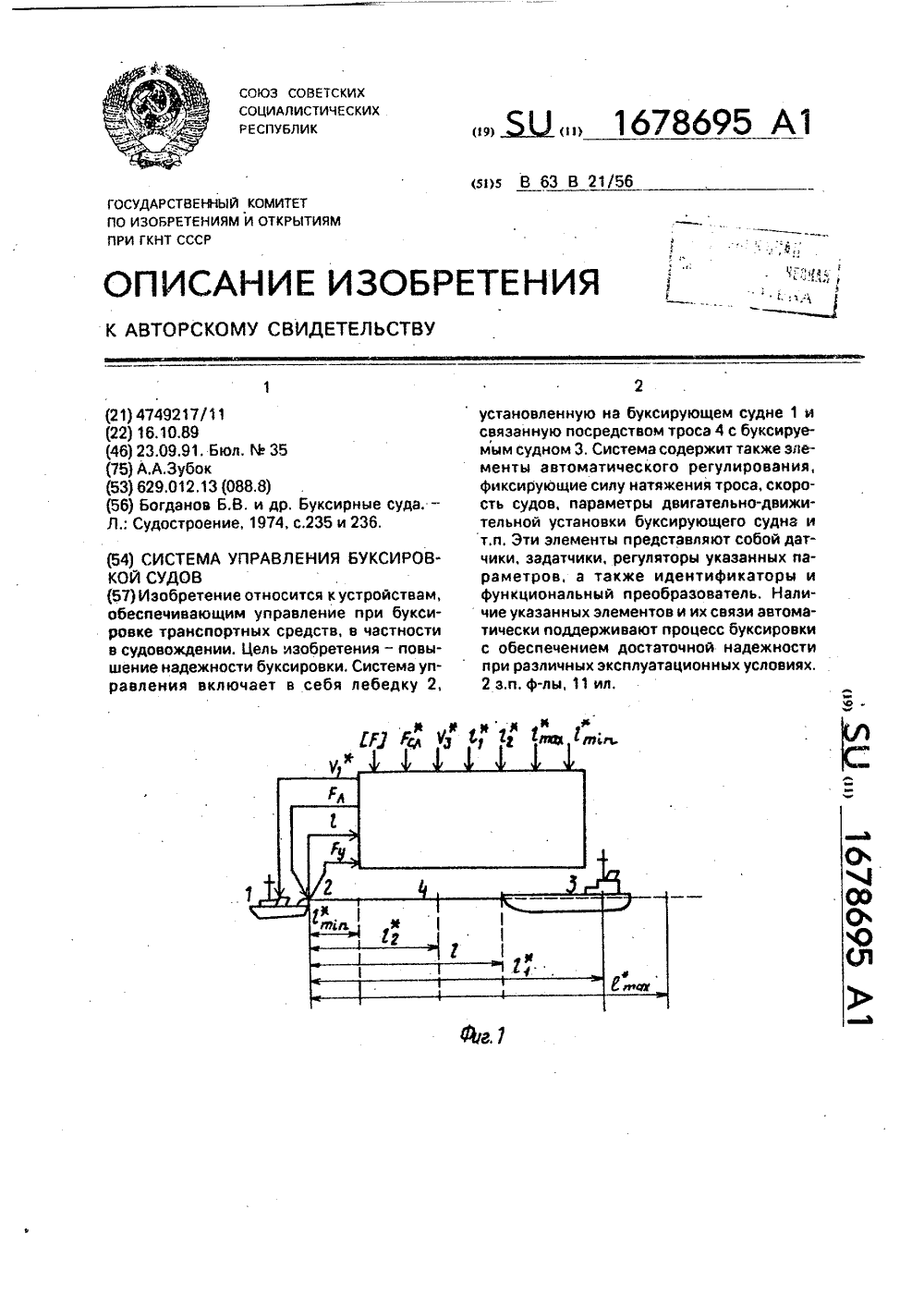
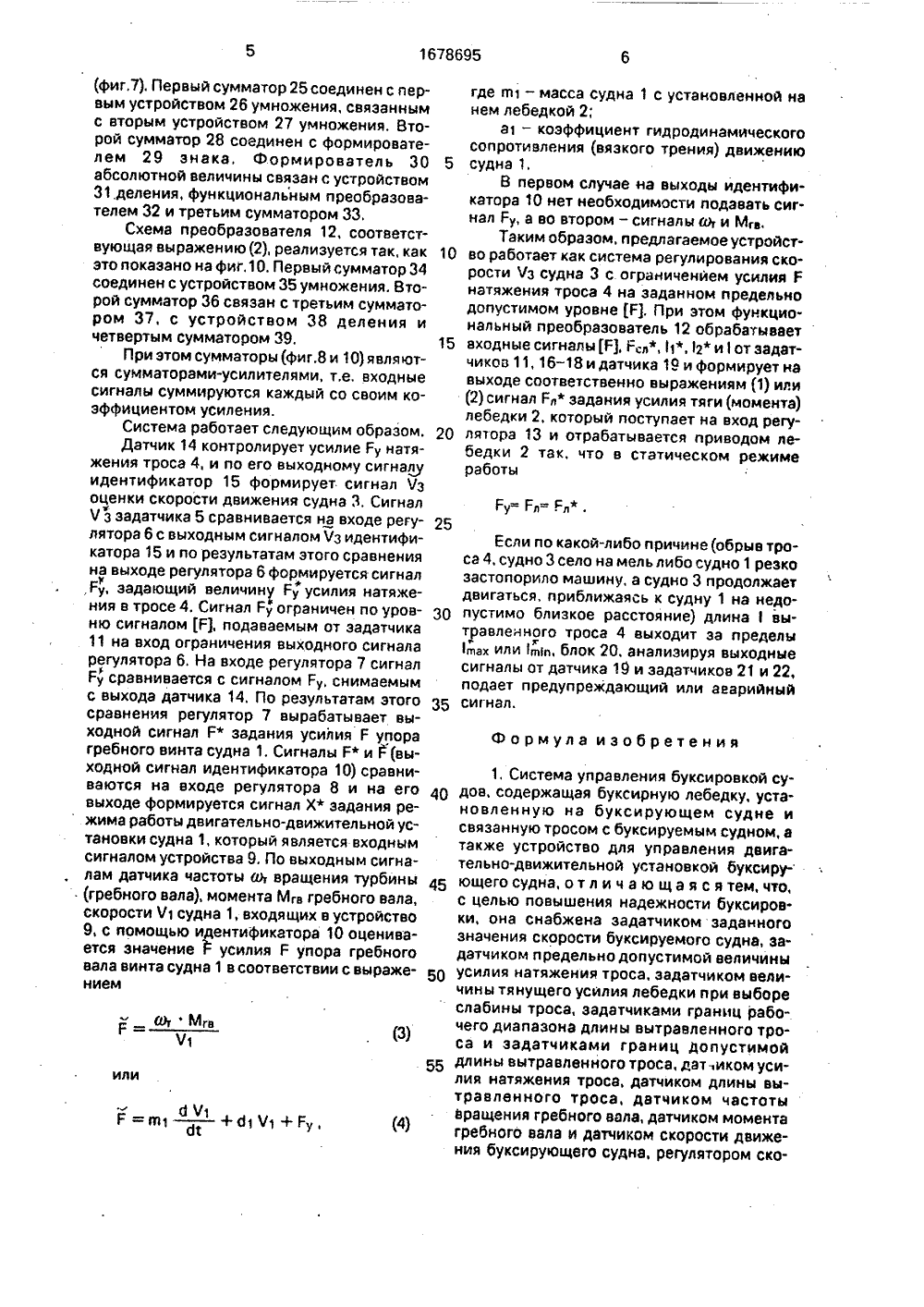
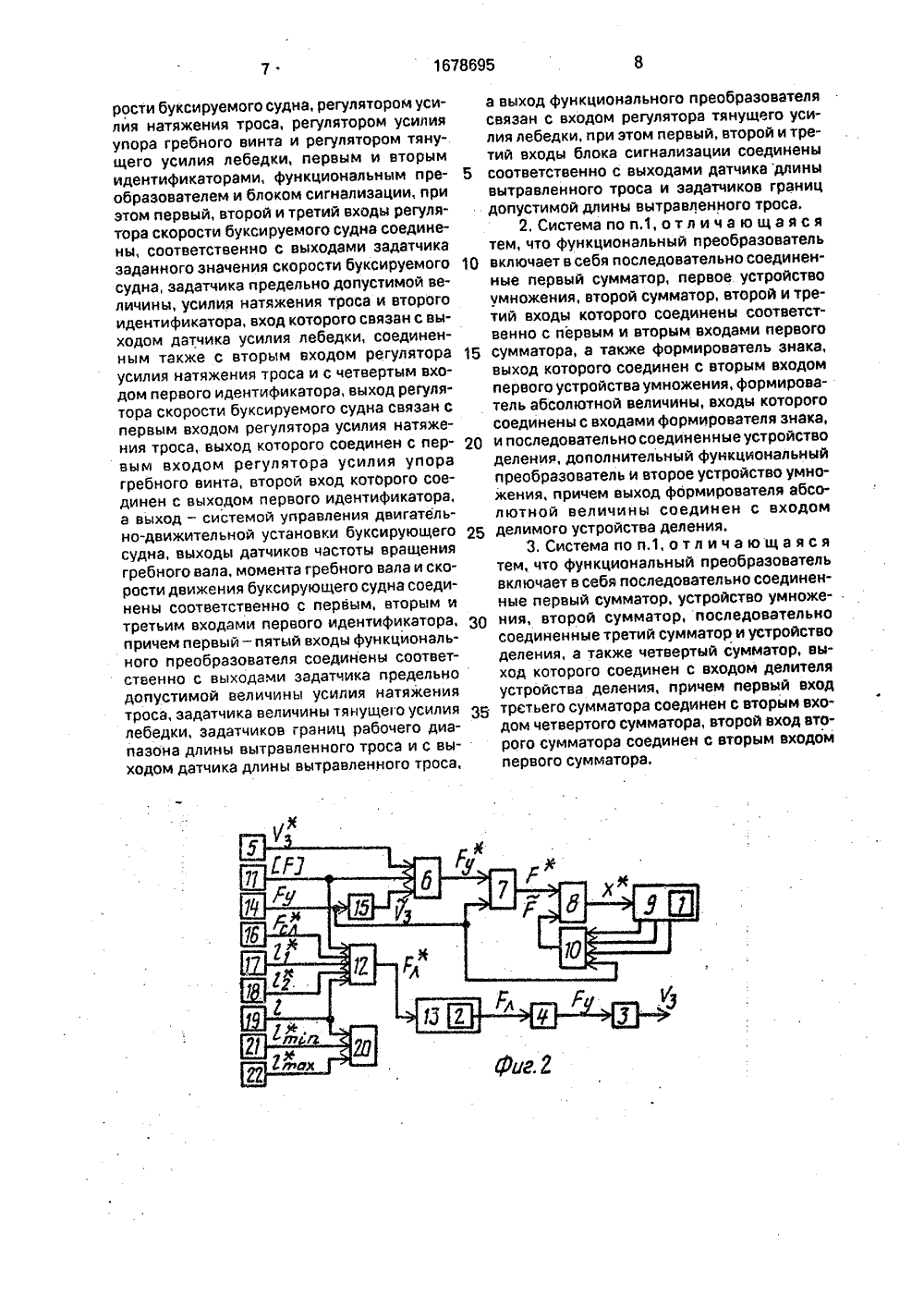
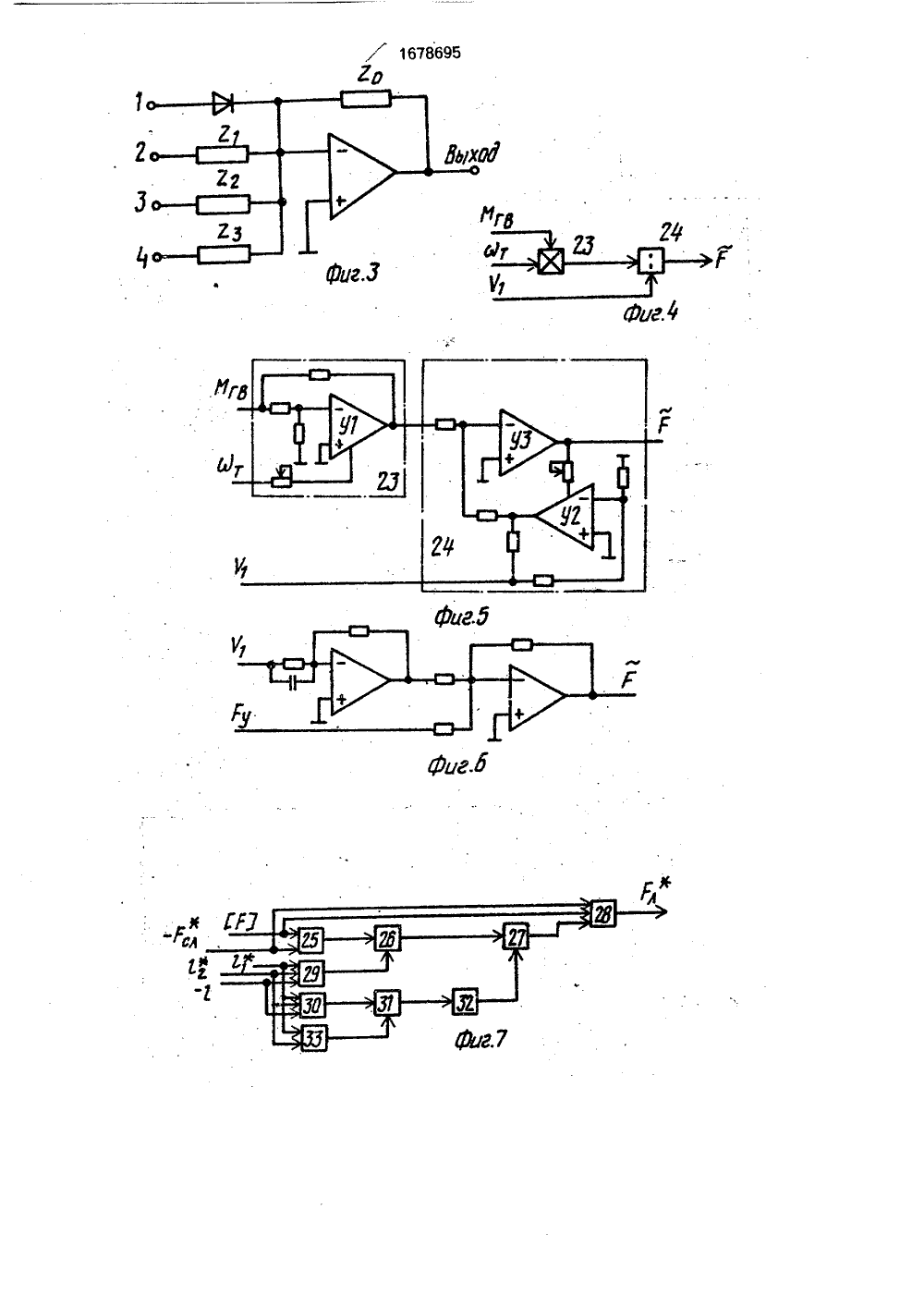
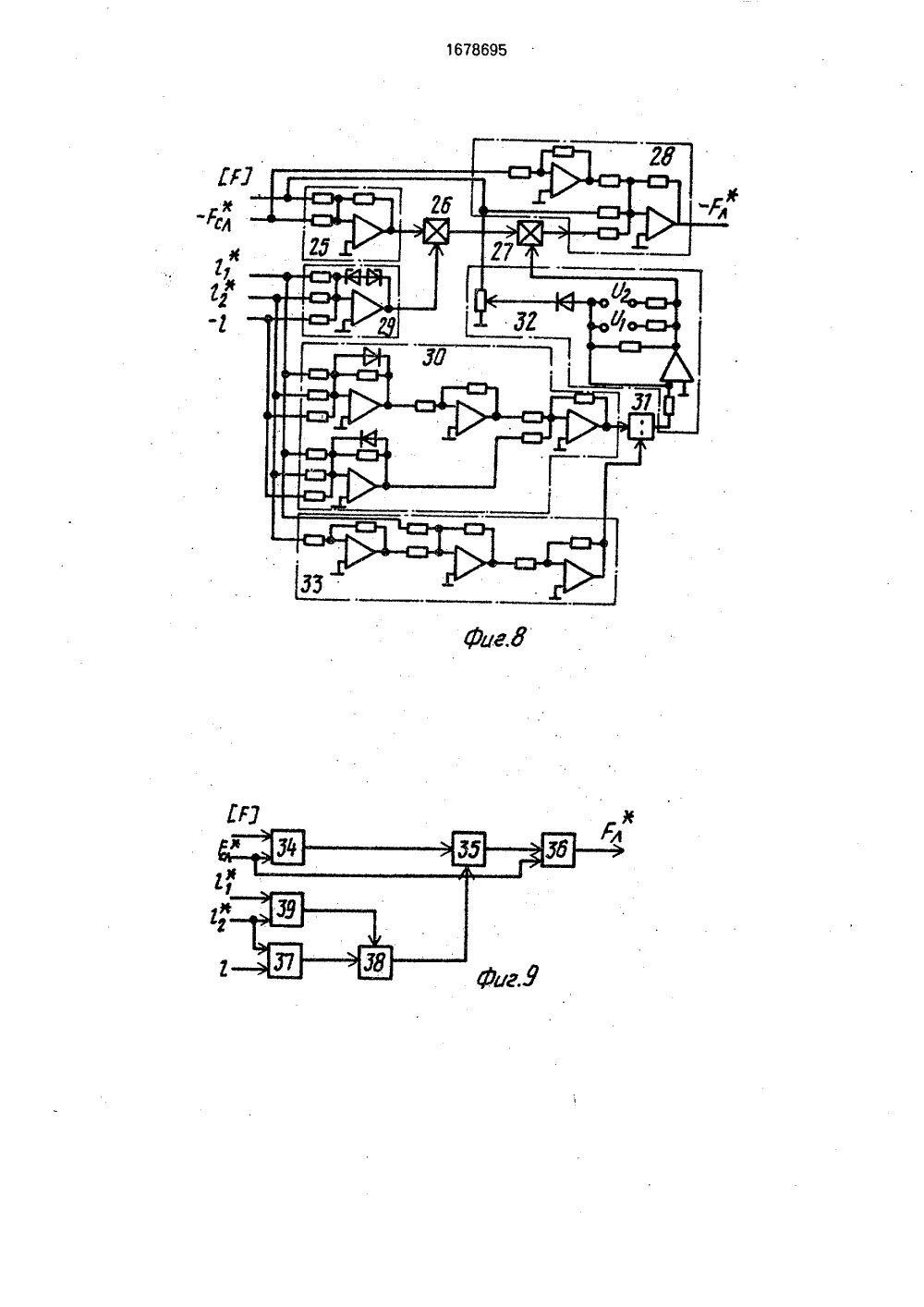
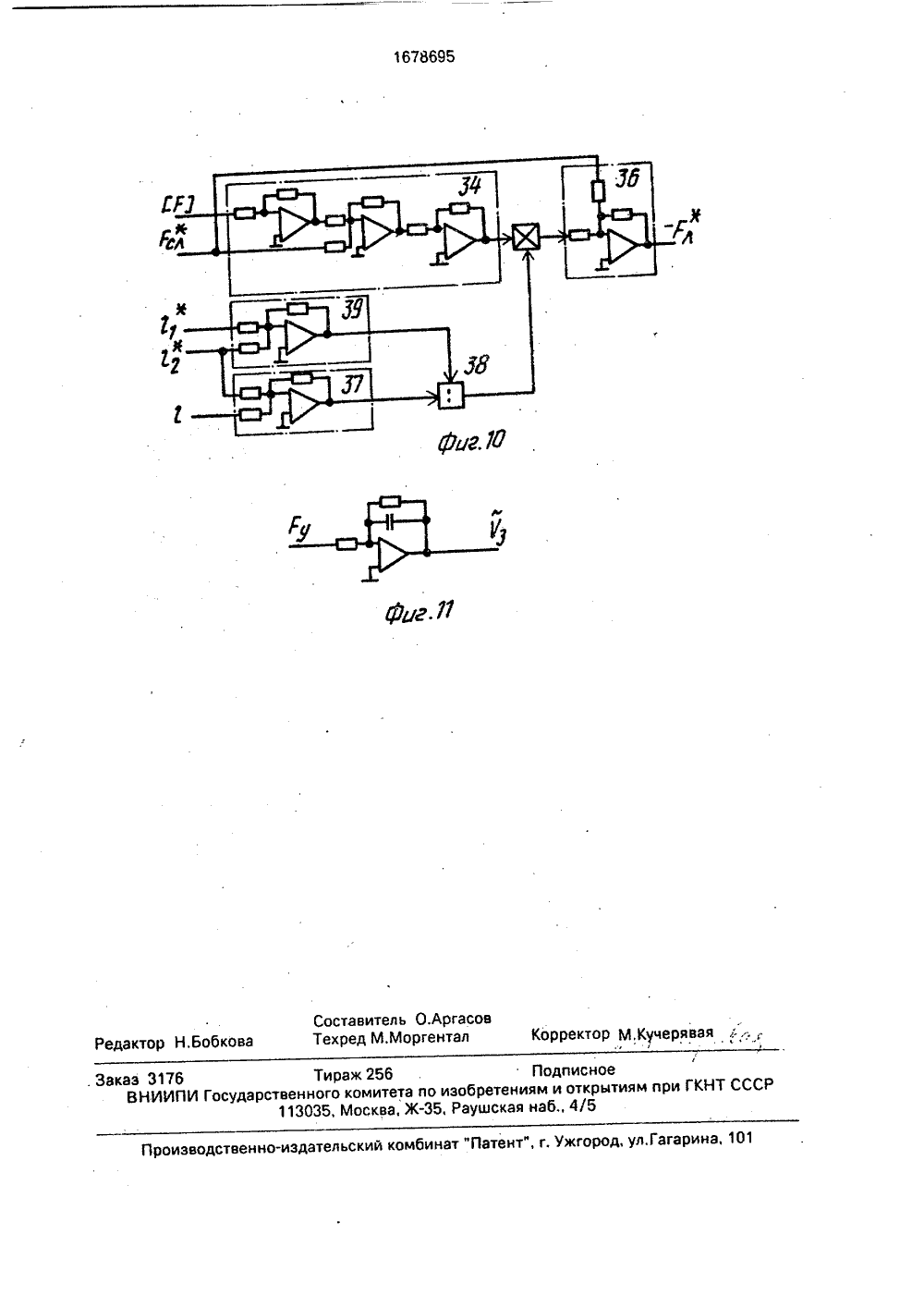
(5)5 В 63 В 2 ОСУДАРСТВЕННЫИ КОМИТЕТО ИЗОБРЕТЕНИЯМ И ОТКРЫТРИ ГКНТ СССР ИСАН И Е ИЗС)БРЕТЕ Н И К АВТОРСКОМУ СВИ ЛЬСТВУ(54) СИСТЕМА УПКОЙ СУДОВ(57) Изобретение ообеспечивающимровке транспортнв судовождении. Цшение надежностиравления включ В 5 ЕНИЯ БУКСИ тносится куступравлениеых средств, в ель изобретен буксировки. Сает в себя л ройствам, при буксичастности ия - повыистема упебедку 2,СЛ 88.8)В. и др, Буксирные суда, -е, 1974, с.235 и 236. 2установленную на буксирующем судне 1 и связанную посредством троса 4 с буксируемым судном 3. Система содержит также элементы автоматического регулирования, фиксирующие силу натяжения троса, скорость судов, параметры двигательно-движительной установки буксирующего судна и т.п. Эти элементы представляют собой датчики, задатчики, регуляторы укаэанных параметров, а также идентификаторы и функциональный преобразователь, Наличие указанных элементов и их связи автоматически поддерживают процесс буксировки с обеспечением достаточной надежности при различных эксплуатационных условиях, 2 з.п. ф-лы, 11 ил.Изобретение относится к устройствам, обеспечивающим управление при буксировке транспортных средств, в частности, в судовождении.Цель изобретения - повышение надежности буксировки,На фиг,1 показано схематично управление буксировкой; на фиг, 2 - блок-схема устройства управления буксировкой; на фиг,3 - регулятор на базе операционного усилителя; на фиг.4 - блок-схема идентификатора; на фиг.5 - принципиальная схема идентификатора; на фиг,6 - идентификатор, вариант выполнения; на фиг.7 - блок-схема функционального преобразователя; на фиг.8 - принципиальная схема преобразователя; на фиг.9 - блок-схема преобразователя, вариант выполнения; на фиг.10 - принципиальная схема этого преобразователя; на фиг.11 - идентификатор, второй вариант выполнения.Система содержит буксирующее судно 1 с установленной на нем лебедкой 2, связанной с буксируемым судном 3 буксирным тросом 4, Управляют устройством, задавая исходные данные для режима буксировки - максимально допустимое усилие Я натяжения буксирного троса 4, усилие Е сл натяжения троса 4 при выборе слабины, скорость Ч э движения буксируемого судна 3, определены 1, 12 и щах, 1 аи соответственно рабочей и допустимой длин . вытравленного троса 4, Устройство анализирует обратные связи по усилию Еу натяжения троса 4, длине 1 вытравленного лебедкой 2 троса 4 и формирует сигналы Ч, Ел управления скоростью Ч 1 буксирующего судна 1 и тягой Ел буксирной лебедки 2. При этом, чтобы обеспечить "мягкий" выбор слабины троса 4 и демпфирование колебаний натяжения троса 4, в том числе и при буксировке на волнении, сигнал управления Гл лебедкой 2 формируют по закону, например; 10 20 25 30 40 Е- Ц+ -Ц-Е ХЕл2 2 11 + 12где 1 о либо по какому-то другому целесообразному закону, например линейному на рабочемучастке: 50х(1 е , ) з 19 п(1 - 1 о), (1)1 - 12 Ел =Есл+(Е) - Есл) ф . ф12 1 -12=ЕЩЕ" Гсл ),при 12111- 12Ел =Есл при 1 5 12Ел =Е при 1 11,Система управления содержит последовательно соединенные задатчик 5 заданного значения Чэ скорости буксируемого судна, регулятор 6 скорости Чэ судна 3, регулятор 7 усилия Гу натяжения буксируемого троса 4, регулятор 8 усилия Е упора гребного винта судна 1, устройство 9 управления двигательно-движительной установкой судна 1, первый идентификатор 10 и второй вход регулятора 8, последовательно соединенные задатчик 11 предельно допустимой величины 1 Е) усилия натяжения троса 4, функциональный преобразователь 12 задания величины Гл заданного значения тянущего усилия Ел лебедки 2 (момента на барабане лебедки 2), регулятр 13 тянущего усилия (момента Ел лебедки 2, последовательно соединенные датчик 14 усилия Еу натяжения троса 4, второй идентификатор 15 и третий вход регулятора 6, задатчики 16 величины тянущего усилия (момента) Есл лебедки 2 при выборе слабины троса 4, эадатчики 17 и 18 границ 1 и 12 рабочего диапазона длины вытравленного троса 4 и датчик 19 длины вытравленного троса 4, выходы которых соединены с соответствующими входами преобразователя 12, блок 20 сигнализации, первый вход которого соединен с выходом датчика 19, задатчики 21 и 22 границ 1 вп и Ьах допустимой длины вытравленного троса 4, выходы которых соединены соответственно с вторым и третьим входами блока 20, второй и третий входы идентификатора 10 соответственно соединены с вторым и третьиц выходами устройства 9, а четвертый его вход - с выходом датчика 14, выход эадатчика 11 соединен с вторым входом регулятора 6, выход датчика 14 соединен с вторым входом регулятора 7, причем первым выходом устройства 9 является выход датчика частоты вращения гребного вала, вторым - выход датчика момента гребного вала, третьим - выход датчика скорости Ч движения судна 1.Идентификатор 10(фиг,4-6) на базе операционн ых усилителей имеет устройство 23 умножения и устройство 24 деления.Функциональный преобразователь 12, соответствующий выражению (1), может быть реализован на базе тех же усилителей(фиг,7), Первый сумматор 25 соединен с первым устройством 26 умножения, связанным с вторым устройством 27 умножения. Второй сумматор 28 соединен с формирователем 29 знака. Формирователь 30 абсолютной величины связан с устройством 31 деления, функциональным преобразователем 32 и третьим сумматором ЗЗ.Схема преобразователя 12, соответствующая выражению(2), реализуется так, как это показано на фиг.10. Первый сумматор 34 соединен с устройством 35 умножения. Второй сумматор 36 связан с третьим сумматором 37, с устройством 38 деления и четвертым сумматором 39.При этом сумматоры (фиг.8 и 10) являются сумматорами-усилителями, т,е. входные сигналы суммируются каждый со своим коэффициентом усиления.Система работает следующим образом.Датчик 14 контролирует усилие Еу натяжения троса 4, и по его выходному сигналу идентификатор 15 формирует сигнал Чз оценки скорости движения судна 3. Сигнал Ч з задатчика 5 сравнивается на входе регулятора 6 с выходным сигналом Чз идентификатора 15 и по результатам этого сравнения на выходе регулятора 6 формируется сигнал ,Еу, задающий величину Еу усилия натяжения в тросе 4. Сигнал Еу ограничен по уровню сигналом Я, подаваемым от задатчика 11 на вход ограничения выходного сигнала регулятора 6. На входе регулятора 7 сигнал Еу сравнивается с сигналом Еу, снимаемым с выхода датчика 14. По результатам этого сравнения регулятор 7 вырабатывает выходной сигнал Е задания усилия Е упора гребного винта судна 1. Сигналы Е и Е(выходной сигнал идентификатора 10) сравниваются на входе регулятора 8 и на его выходе формируется сигнал Х задания ре жима работы двигательно-движительной установки судна 1, который является входным сигналом устройства 9. По выходным сигналам датчика частоты а вращения турбины (гребного вала), момента Мгв гребного вала, скорости Ч 1 судна 1, входящих в устройство 9, с помощью идентификатора 10 оценивается значение Е усилия Е упора гребного вала винта судна 1 в соответствии с выраже- нием10 15 20 25 30 35 40 45 50 55 где а - масса судна 1 с установленной нанем лебедкой 2;а - коэффициент гидродинамическогосопротивления (вязкого трения) движениюсудна 1. В первом случае на выходы идентификатора 10 нет необходимости подавать сигнал Еу, а во втором - сигналы в и Мгв.Таким образом, предлагаемое устройство работает как система регулирования скорости Чз судна 3 с ограничением усилия Е натяжения троса 4 на заданном предельно допустимом уровне (Е, При этом функциональный преобразователь 12 обрабатывает входные сигналы Я, Ел, 1, 2 иот эадатчиков 11, 16-18 и датчика 19 и формирует на выходе соответственно выражениям (1) или (2) сигнал Ел задания усилия тяги (момента) лебедки 2. который поступает на вход регулятора 13 и отрабатывается приводом лебедки 2 так, что в статическом режиме работы Е= Е= Е,Если по какой-либо причине (обрыв троса 4, судно 3 село на мель либо судно 1 резко застопорило машину. а судно 3 продолжает двигаться, приближаясь к судну 1 на недопустимо близкое расстояние) длинавытравленного троса 4 выходит за пределы щах или Ъь, блок 20, анализируя выходные сигналы от датчика 19 и задатчиков 21 и 22, подает предупреждающий или аварийный сигнал. Формула изобретения 1, Система управления буксировкой судов, содержащая буксирную лебедку, установленную на буксирующем судне и связанную тросом с буксируемым судном, а также устройство для управления двигательно-движительной установкой буксирующего судна, о т л и ч а ю щ а я с я тем, что, с целью повышения надежности буксировки, она снабжена задатчиком заданного значения скорости буксируемого судна, задатчиком предельно допустимой величины усилия натяжения троса, задатчиком величины тянущего усилия лебедки при выборе слабины троса, эадатчиками границ рабочего диапазона длины вытравленного троса и эадатчиками границ допустимой длины вытравленного троса, дат иком усилия натяжения троса, датчиком длины вытравленного троса, датчиком частоты вращения гребного вала, датчиком момента гребного вала и датчиком скорости движения буксирующего судна. регулятором ско 7 1678695рости буксируемого судна, регулятором усилия натяжения троса, регулятором усилия упора гребного винта и регулятором тянущего усилия лебедки, первым и вторым идентификаторами, функциональным преобразователем и блоком сигнализации, при этом первый, второй и третий входы регулятора скорости буксируемого судна соединены, соответственно с выходами задатчика заданного значения скорости буксируемого судна, задатчика предельно допустимой величины, усилия натяжения троса и второго идентификатора, вход которого связан с выходом датчика усилия лебедки, соединенным также с вторым входом регулятора усилия натяжения троса и с четвертым входом первого идентификатора, выход регулятора скорости буксируемого судна связан с первым входом регулятора усилия натяжения троса, выход которого соединен с первым входом регулятора усилия упора гребного винта, второй вход которого соединен с выходом первого идентификатора, а выход - системой управления двигатель- но-движительной установки буксирующего судна, выходы датчиков частоты вращения гребного вала, момента гребного вала и скорости движения буксирующего судна соединены соответственно с первым, вторым и третьим входами первого идентификатора, причем первый - пятый входы функционального преобразователя соединены соответственно с выходами задатчика предельно допустимой величины усилия натяжения троса, задатчика величины тянущего усилия лебедки, задатчиков границ рабочего диапазона длины вытравленного троса и с выходом датчика длины вытравленного троса,а выход функционального преобразователясвязан с входом регулятора тянущего усилия лебедки, при этом первый, второй и третий входы блока сигнализации соединены5 соответственно с выходами датчикадлинывытравленного троса и задатчиков границдопустимой длины вытравленного троса.2. Система по п 1, отл ича ющая с ятем, что функциональный преобразователь10 включает в себя последовательно соединенные первый сумматор, первое. устройствоумножения, второй сумматор, второй и третий входы которого соединены соответственно с первым и вторым входами первого15 сумматора, а также формирователь знака,выход которого соединен с вторым входомпервого устройства умножения, формирователь абсолютной величины, входы которогосоединены с входами формирователя знака,20 и последовательно соединенные устройстводеления, дополнительный функциональныйпреобразователь и второе устройство умножения, причем выход формирователя абсолютной величины соединен с входом25 делимого устройства деления,3. Система поп.1, отличающаясятем, что функциональный преобразовательвключает в себя последовательно соединенные первый сумматор, устройство умножеЗо ния, второй сумматор, последовательносоединенные третий сумматор и устройстводеления, а также четвертый сумматор, выход которого соединен с входом делителяустройства деления, причем первый входЗ 5 третьего сумматора соединен с вторым входом четвертого сумматора, второй вход второго сумматора соединен с вторым входомпервого сумматора,. Заказ 3176 ВНИИПИ Г Составитель О.АргасоТехред М.Моргентал Тираж 256 Подписноетвенного комитета по изобретениям и открытиям при ГКНТ СС 113035, Москва, Ж, Раушская наб 4/5
СмотретьЗаявка
4749217, 16.10.1989
А. А. Зубок
ЗУБОК АНАТОЛИЙ АБРАМОВИЧ
МПК / Метки
МПК: B63B 21/56
Метки: буксировкой, судов
Опубликовано: 23.09.1991
Код ссылки
<a href="https://patents.su/7-1678695-sistema-upravleniya-buksirovkojj-sudov.html" target="_blank" rel="follow" title="База патентов СССР">Система управления буксировкой судов</a>
Способ измерения осевого усилия и крутящего момента гребного винта судна и устройство для его осуществления

Номер патента: 1756776
Опубликовано: 23.08.1992
Автор: Беззубик
МПК: G01L 1/22
Метки: винта, гребного, крутящего, момента, осевого, судна, усилия
...токосъемное уст-ройство, резисторный делителько 1 лпейсацйонной цепи и регистраторы осевого усилий и крутящего момента, при этомв устройствбвведены сумматор и переключатель, причем реэисторный делитель компенсационной цепй через переключательподключен к выходу усилйтеля крутящегомомента,выходрезисторногоделителя компенсационной цепи соединен с одним входом сумматора, другой вход которого соединен с выходом усилителя осевого усилия, а выходы сумматора и усилителя крутящего момента соединены с регистраторами соот ветственно осевого усилия и крутящего момента.На фиг. 1 изображена блок-схема устройства; на фиг, 2 - электрическая схема; на фиг. 3 - схема расположения тенэорезисто ров на гребном валу.Устройство содержит фиг. 1 и 2)...
Регулятор гребного механизма

Номер патента: 472064
Опубликовано: 30.05.1975
Автор: Гораздовский
МПК: B63H 23/02
Метки: гребного, механизма, регулятор
...и 24 зубчатые колеса 15 и 16 могут свободно поворачиваться соответственно на валу 19 и опоре 25; при включении этих муфт зубчатое колесо 15 неподвижно скрепляется с валом 19, а зубчатое колесо 16 - с нижней половиной фрикционной муфты 24, образуя с опорой 25 винтовую пару,В рабочем положении, т. е. в процессе передачи усилий от гребного приспособления на гребной винт, муфты 20 и 24 выключены, а фрикционная муфта-стопор 17 включена, При этом зубчатое колесо 15 может свободно вращаться на валу 19, а зубчатое колесо 16 - на опоре 25, в то время как зубчатое колесо 14 жестко связано с рычагом 3. При качании рычага 3 вокруг горизонтальной оси, являющейся осью вала 19, рычаг через зубчатое колесо 14 заставляет поворачиваться зубчатое колесо 15...
Релейно-импульсный регулятор для объекта второго порядка

Номер патента: 943640
Опубликовано: 15.07.1982
Авторы: Бичуцкий, Дорофеев, Леденев, Червяков
МПК: G05B 11/14
Метки: второго, объекта, порядка, регулятор, релейно-импульсный
...на его выходе формируется сигнап рассожасоввния 04 У - 0,который поступает на вход реле 2. Придостиженин сигнала 04 порога срабвтывавия реле % нв выходе реле появляетсясзгвал О, который поступает на входблока формирования сигналов уттравлениятми органами 4 и через днческого звена 3. К Выходу блока фОР- мирования сигналов управления исполнительными органами 4 подклточен дифферннциатор 5, формирующий короткий импульсный сигнал по заднему фронту выходного сигнала управления исполнитептными органами. Сформированный импульсчерез второй вход сумматора 6 поступает5 на вход ацериодического звена 3,Выходной сигнал 0 равен О до техпор, пока сигнал рассогласования Ц недостигнет порога срабатывания реле ф .При достижении сигналомвеличины( О 4 Ъ Й )...
Датчик измерения усилий, действующих на модель гребного винта

Номер патента: 588476
Опубликовано: 15.01.1978
Автор: Беззубик
МПК: G01L 5/16
Метки: винта, гребного, датчик, действующих, модель, усилий
...шарнир 9 с силовоспринимающнм элементом 2 и жест ко прикрепленный к измерителю 4 изгибаю3щего момента и к измерителю окружной (Рон) силы и силы упора (Рл) с тензорези; сторами 10 (моста окружной силы) и 11 (моста упора), выполненному в виде упругих параллельных балочек 12 и 13 квадратного поперечного сечения, расположенных перпендикулярно оси 14 (см. фиг. 2) вращения гребного винта, Причем концы 15, 16 и 17 упругих балочек 12 и 13 жестко прикреплены к силовоспринимающему элементу 8, а концы 18, 19 и 20 этих балочек жестко прикреплены к внутренней площадке 21 гребного вала 1.В процессе измерения нагрузок на лопасти 7 все силы и моменты, направленные вдоль лопасти в плоскости вращения, воспринимаются балочками 12 и 13, вызывая их...
Способ снижения сопротивления вращению гребного винта судна

Номер патента: 1678199
Опубликовано: 15.09.1991
МПК: B63B 35/08, B63H 5/16
Метки: винта, вращению, гребного, снижения, сопротивления, судна
...который измеряет скорость вращения гребного винта и увеличивает подачу, когда скорость вращения начинает. пониматься, Детектор-датчик может также измерять крутящий момент гребного винта, и в этом случае подача газа начинается тогда, когда увеличивается крутящий момент, Детекторы-датчики другого типа. например, наблюдающие эа приближением льда, также могут использоваться, Чтобы гаэ мог быстро подаваться на гребной винт, и чтобы его эффект мог быть также быстро остановлен, точка подачи газа должна быть как можно ближе к гребному винту.Гаэ может подаваться либо на основной гребной винт, либо только на гребные винты судна или также на гребные винты рулевого управления, В этой связи основной гоебной винт означает все те гребные винты,...
Предыдущий патент: Судно
Следующий патент: Судовое устройство для транспортировки грузов
Случайный патент: Способ азотирования изделий в тлеющем разряде