Устройство для программного управления позиционированием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
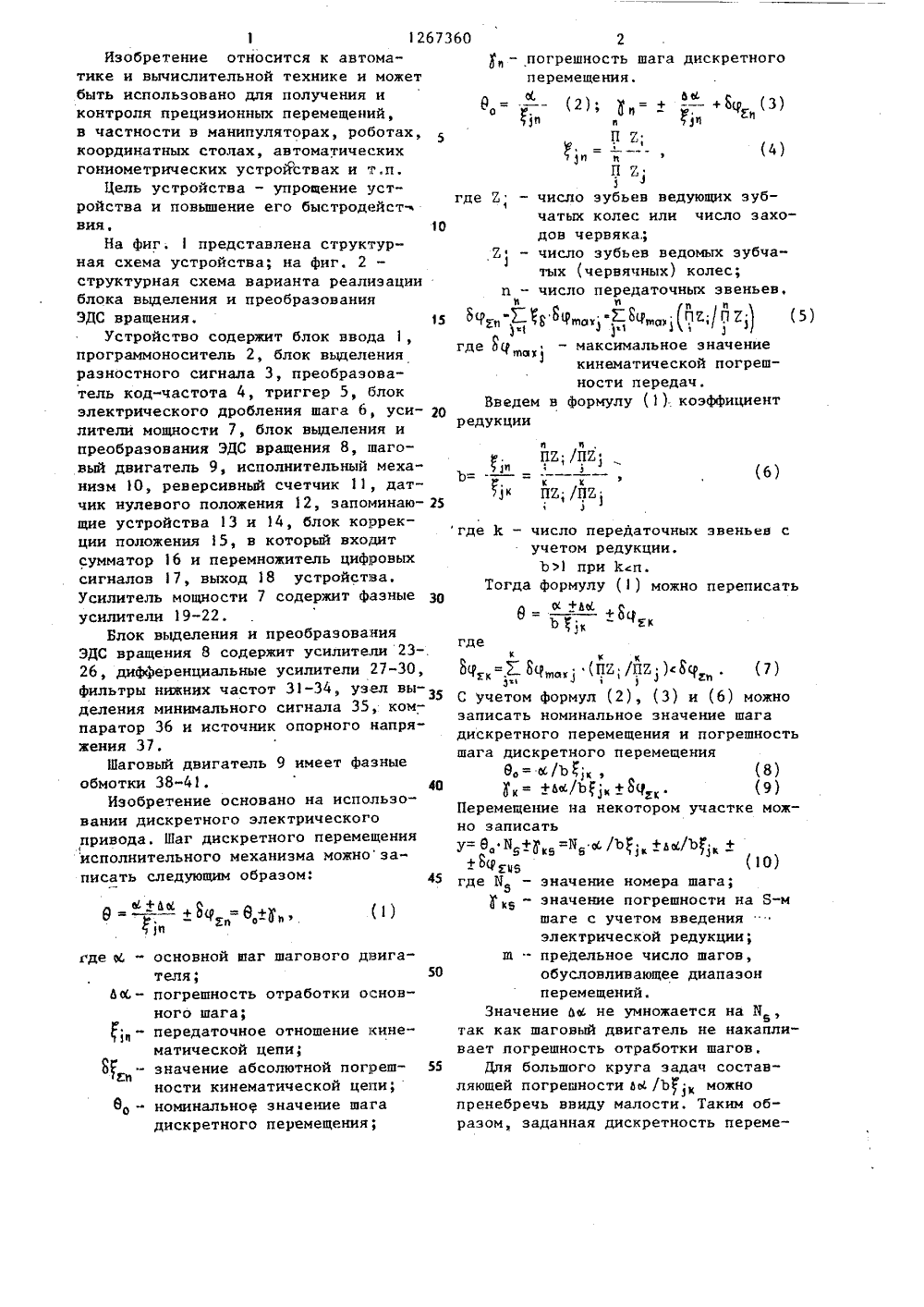
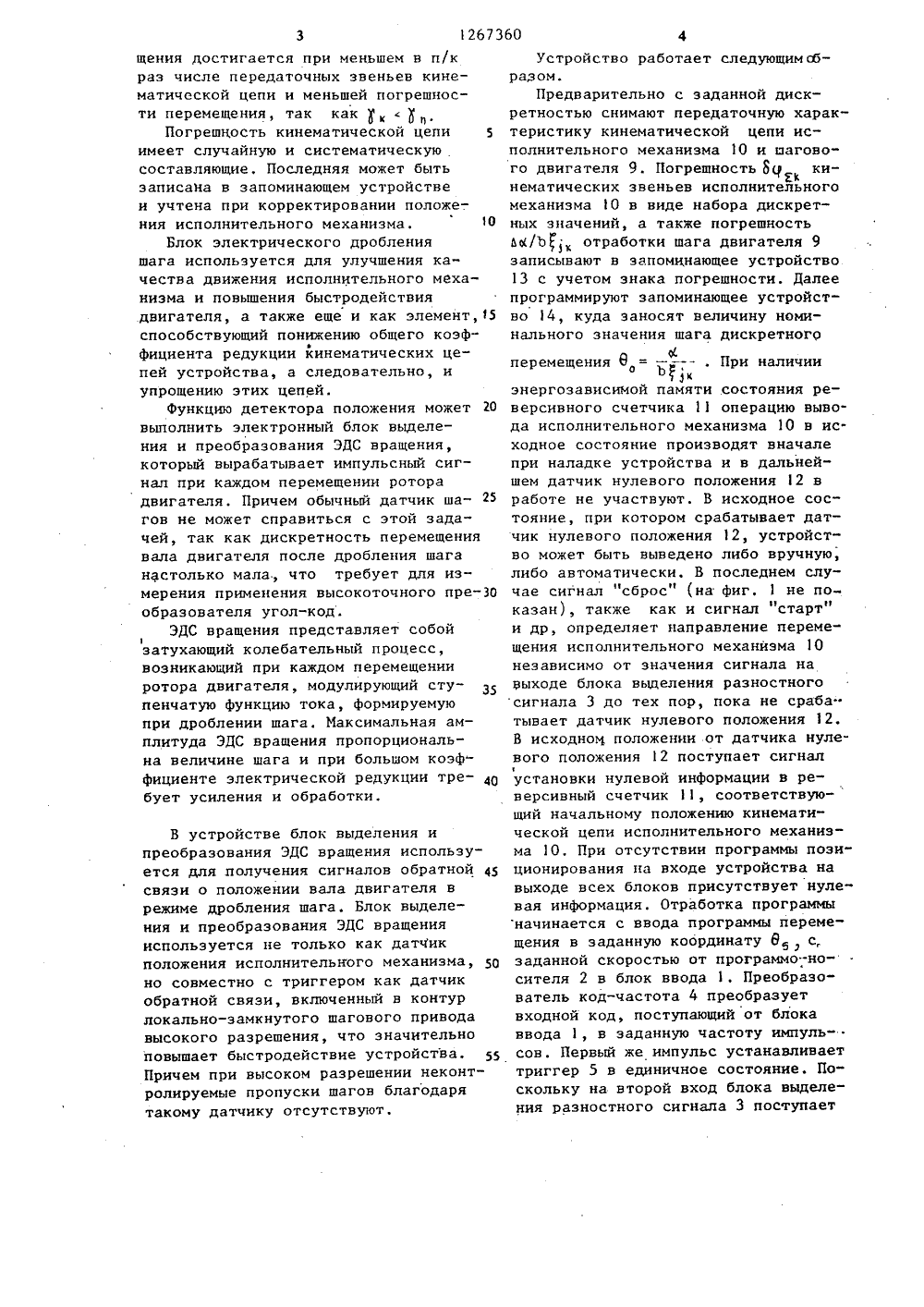
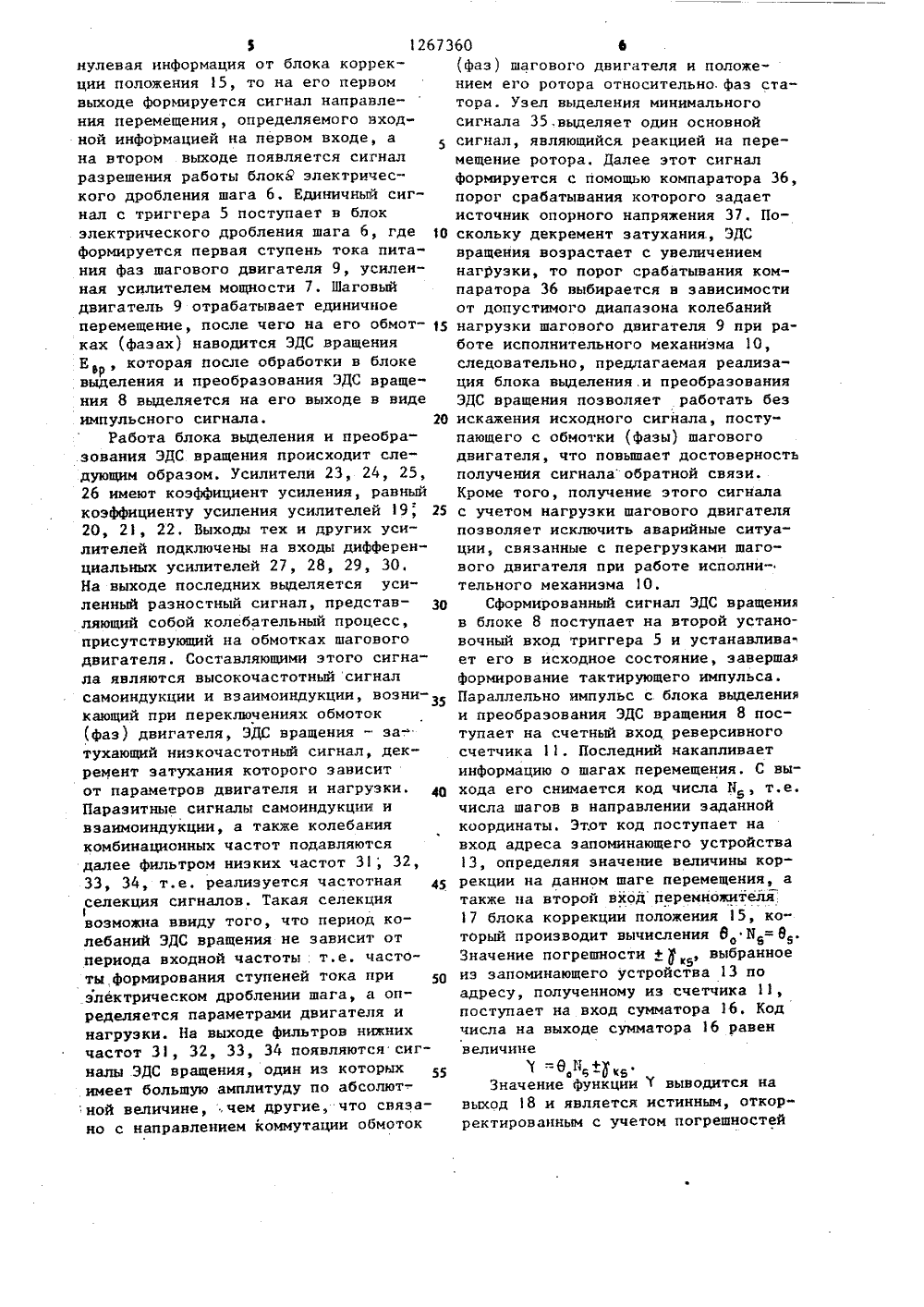
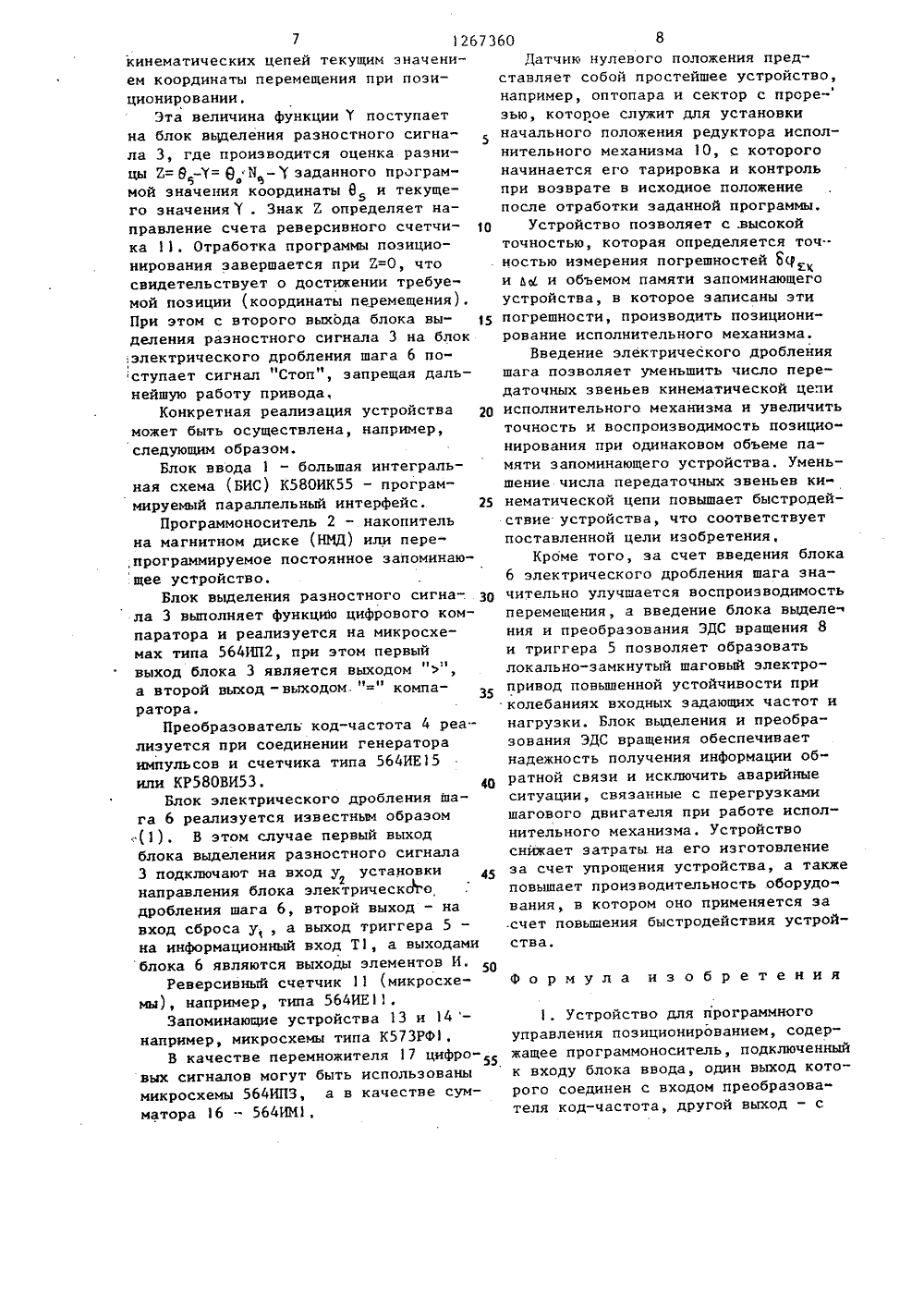
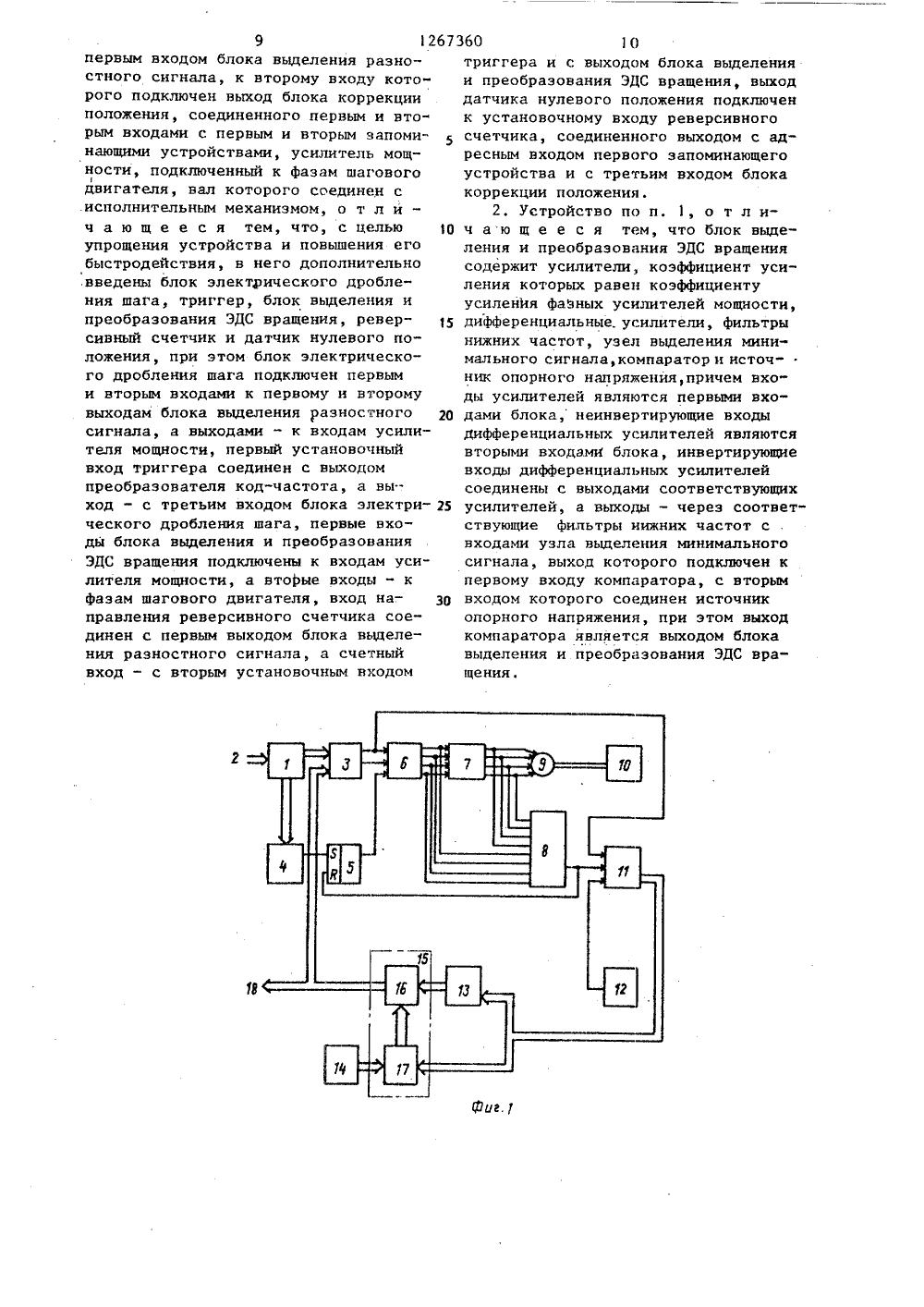
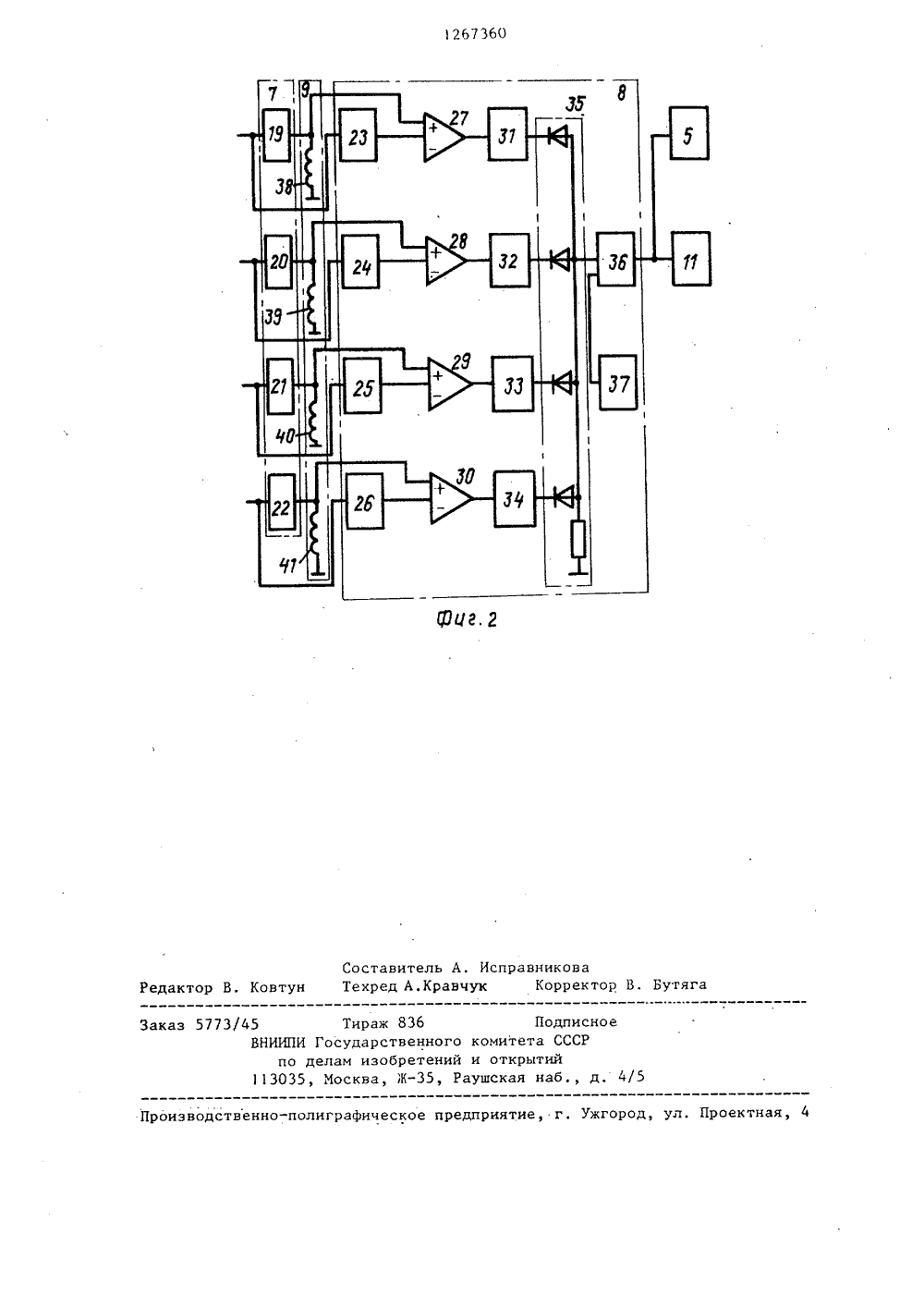
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК А 1 4 С 05 В 19/18 ОПИСАНИЕ ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Ордена Трудового Красного Знамени институт сверхтвердых материалов АН УССР и Киевское проектно-конструкторское бюро автоматизированных систем управления(56) Авторское свидетельство СССР Ф 909784, кл. Н 02 Р 8/00, 1980.Авторское свидетельство СССР 11 932462, кл. О 05 В 19/18, 1980.Международная заявка РСЗО 82/01601, кл. О 05 В 9/19, 1982. (54) УСТРОЙСТВО ДЛЯ ПРОГРАУНОГО УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ (57) Изобретение относится к автоматике и вычислительной технике и может быть использовано для получения и контроля прецизионных неремещеннй,в частности в манипуляторах, роботах, координационных столах, автоматических гониометрических устройствах и т.п. Цель изобретения -упрощение устройства и повышение его быстродействия, Устройство содержит блокввода, преобразователь код-частота,блок выделения разностного сигнала,блок коррекции положения, два запоминающих устройства, блок электрического дробления шага, фазные усилители мощности, шаговый двигатель, исполнительный механизм, реверсивныйсчетчик, датчик нулевого положенияи триггер. Блок выделения и преоб- дФразования ЭДС вращения содержит усилители, коэффициент усиления которых Яравен коэффициенту усиления фазныхусилителей мощности, дифференциальные (усилители, фильтры нижних частот,узел выделения минимального сигнала, Бкомпаратор и источник опорного напряжения. 1 з.п, ф - лы, 2 ил.щения достигается при меньшем в и/краз числе передаточных звеньев кинематической цепи и меньшей погрешности перемещения, так каксоПогрешцость кинематической цепиимеет случайную и систематическуюсоставляющие. Последняя может бытьзаписана в запоминающем устройствеи учтена при корректировании положения исполнительного механизма. 10Блок электрического дробленияшага используется для улучшения качества движения исполнительного механизма и повышения быстродействиядвигателя, а также еще и как элемент,5способствующий понижению общего козффициента редукции кинематических цепей устройства, а следовательно, иупрощению этих цепей.Функцию детектора положения может Ювыполнить электронный блок выделения и преобразования ЭДС вращения,который вырабатывает импульсный сигнал при каждом перемещении роторадвигателя. Причем обычный датчик шагов не может справиться с этой задачей, так как дискретность перемещениявала двигателя после дробления шаганастолько мала, что требует для измерения применения высокоточного пре образователя угол-код.ЭДС вращения представляет собой1затухающий колебательный процесс,возникающий при каждом перемещенииротора двигателя, модулирующий ступенчатую функцию тока, формируемуюпри дроблении шага. Максимальная амплитуда ЭДС вращения пропорциональна величине шага и при большом коэффициенте электрической редукции требует усиления и обработки,В устройстве блок выделения и преобразования ЭДС вращения используется для получения сигналов обратной 45 связи о положении вала двигателя в режиме дробления шага. Блок выделения и преобразования ЭДС вращения используется не только как датчик положения исполнительного механизма, но совместно с триггером как датчик обратной связи, включенный в контур локально-замкнутого шагового привода высокого разрешения, что значительно повышает быстродействие устройства. 55 Причем при высоком разрешении неконтролируемые пропуски шагов благодаря такому датчику отсутствуют. Устройство работает следующим сбразом,Предварительно с заданной дискретностью снимают передаточную характеристику кинематической цепи исполнительного механизма 10 и шагового двигателя 9. Погрешность Зц киЕК нематических звеньев исполнительного механизма О в виде набора дискретных значений, а также погрешность 6 М/Ьотработки шага двигателя 9 записывают в запомцнающее устройство 13 с учетом знака погрешности. Далее программируют запоминающее устройство 14, куда заносят величину номинального значения шага дискретного0перемещения 6 = --- . При наличиио Ьэнергозависимой памяти .состояния реверсивного счетчика 11 операцию вывода исполнительного механизма 10 в исходкое состояние производят вначале при наладке устройства и в дальнейшем датчик нулевого положения 2 в работе не участвуют. В исходное состояние, при котором срабатывает датчик нулевого положения 12, устройство может быть выведено либо вручную, либо автоматически. В последнем случае сигнал "сброс" (на фиг, 1 не показан), также как и сигнал старт" и др, определяет направление перемещения исполнительного механизма 10независимо от значения сигнала на выходе блока выделения разностного сигнала 3 до тех пор, пока не срабатывает датчик нулевого положения 12. В исходном положении от датчика нулевого положения 12 поступает сигнал 1установки нулевой информации в реверсивный счетчик 11, соответствующий начальному положению кинематической цепи исполнительного механизма 10. При отсутствии программы позиционирования на входе устройства навыходе всех блоков присутствует нулевая информация. Отработка программы начинается с ввода программы перемещения в заданную координату В с, заданной скоростью от программо-носителя 2 в блок ввода 1, Преобразователь код-частота 4 преобразует входной код, поступающий от блока ввода 1, в заданную частоту импуль-сов. Первый же импульс устанавливает триггер 5 в единичное состояние. Поскольку на второй вход блока выделения разностного сигнала 3 поступает5 1267нулевая информация от блока коррекции положения 15, то на его первомвыходе формируется сигнал направления перемещения, определяемого входной информацией на первом входе, ана втором выходе появляется сигналразрешения работы блокй электрического дробления шага 6, Единичный сигнал с триггера 5 поступает в блокэлектрического дробления шага 6, где 10формируется первая ступень тока питания фаз шагового двигателя 9, усиленная усилителем мощности 7. Шаговыйдвигатель 9 отрабатывает единичноеперемещение, после чего на его обмотках (фазах) наводится ЭДС вращенияЕ , которая после обработки в блокевыделения и преобразования ЭДС вращения 8 вьщеляется на его выходе в видеимпульсного сигнала. 20Работа блока вьщеления и преобразования ЭДС вращения происходит сле"дующим образом. Усилители 23, 24, 25,26 имеют коэффициент усиления, равныйкоэффициенту усиления усилителей 19; 2520, 21, 22, Выходы тех и других усилителей подключены на входы дифференциальных усилителей 27, 28, 29, 30,На выходе последних выделяется усиленный разностный сигнал, представ- ЗОляющий собой колебательный процесс,присутствующий на обмотках шагового двигателя. Составляющими этого сигнала являются высокочастотный сигналсамоиндукции и взаимоиндукции, возникающий при переключениях обмоток(фаз) двигателя, ЭДС вращения - за-. тухающий низкочастотный сигнал, декремент затухания которого зависитот параметров двигателя и нагрузки. Паразитные сигналы самоиндукции и взаимоиндукции, а также колебания комбинационных частот подавляются далее фильтром низких частот 31; 32, 33, 34, т.е. реализуется частотная селекция сигналов. Такая селекциявозможна ввиду того, что период колебаний ЭДС вращения не зависит от периода входной частоты . т,е. частоты формирования ступеней тока при электрическом дроблении шага, а определяется параметрами двигателя и нагрузки. На выходе фильтров нижних частот 3, 32, 33, 34 появляются сигналы ЭДС вращения, один из которых ,имеет большую амплитуду по абсолютной величине, ,чем другие что связано с направлением коммутации обмоток 360 Ф(Фаз) шагового двигателя и положением его ротора относительно. Фаз статора. Узел выделения минимальногосигнала 35,вьщеляет один основнойсигнал, являющийся. реакцией на перемещение ротора, Далее этот сигналформируется с помощью компаратора 36,порог срабатывания которого задаетисточник опорного напряжения 37, Поскольку декремент затухания, ЭДСвращения возрастает с увеличениемнагрузки, то порог срабатывания компаратора 36 выбирается в зависимостиот допустимого диапазона колебанийнагрузки шагового двигателя 9 лри работе исполнительного механизма 10,следовательно, предлагаемая реализация блока вьщеления.и преобразованияЭДС вращения позволяет работать безискажения исходного сигнала, поступающего с обмотки (фазы) шаговогодвигателя, что повышает достоверностьполучения сигнала обратной связи.Кроме того, получение этого сигналас учетом нагрузки шагового двигателяпозволяет исключить аварийные ситуации, связанные с перегрузками шагового двигателя при работе исполнительного механизма 10.Сформированный сигнал ЭДС вращенияв блоке 8 поступает на второй установочный вход триггера 5 и устанавливает его в исходное состояние, завершаяформирование тактирующего импульса.Параллельно импульс с блока вьщеленияи преобразования ЭДС вращения 8 поступает на счетный вход реверсивногосчетчика 11. Последний накапливаетинформацию о шагах перемещения. С выхода его снимается код числа И , т.е.числа шагов в направлении заданнойкоординаты. Этот код поступает навход адреса запоминающего устройства13, определяя значение величины коррекции на данном шаге перемещения, атакже на второй вход реремножитезж17 блока коррекции положения 15, который производит вычисления В Н = 9 .Значение погрешности + , выбранноеиэ запоминающего устройства 13 поадресу, полученному из счетчика 11,поступает на вход сумматора 16, Кодчисла на выходе сумматора 16 равенвеличинес .=О,Б,щЗначение функцйи 1 выводится навыход 18 и является истинным, откорректированным с учетом погрешностей45 ства. 1. Устройство для программного управления позиционированием, содержащее программоноситель, подключенный к входу блока ввода, один выход которого соединен с входом преобразователя код-частота, другой выход - с 7 2673кинематических цепей текущим значением координаты перемещения при позиционировании.Эта величина функции У поступаетна блок выцеления разностного сигна 5ла 3, где производится оценка разницы 2= 9 -У= 9 И - заданного программ о 6мой значения координаты 6 и текуще 5го значения У . Знак 2 определяет направление счета реверсивного счетчи- Ока 11, Отработка программы позиционирования завершается при 2=0, чтосвидетельствует о достижении требуемой позиции (координаты перемещения),При этом с второго выхода блока выделения разностного сигнала 3 на блок;электрического дробления шага 6 поступает сигнал Стоп", запрещая даль -нейшую работу привода,Конкретная реализация устройстваможет быть осуществлена, например,следующим образом.Блок ввода 1 - большая интегральная схема (БИС) К 580 ИК 55 - программируемый параллельный интерфейс. 25Программоноситель 2 - накопительна магнитном диске (НМД) или пере,программируемое постоянное запоминающее устройство.Блок выделения разностного сигна-. ЗОла 3 выполняет функцию цифрового компаратора и реализуется на микросхемах типа 564 ИП 2, при этом первыйвыход блока 3 является выходом "),а второй выход -выходом. "=" компа 35ратора,Преобразователь код-частота 4 реализуется при соединении генератораимпульсов и счетчика типа 564 ИЕ 15или КР 580 ВИ 53.40Блок электрического дробления шага 6 реализуется известным образом-.(1). В этом случае первый выходблока выделения разностного сигнала3 подключают на вход у установкинаправления блока электрическодробления шага 6, второй выход - навход сброса у а выход триггера 5 -на информационный вход Т 1, а выходамиблока 6 являются выходы элементов И.Реверсивный счетчик 11 (микросхемы), например, типа 564 ИЕ 1,Запоминающие устройства 13 и 14 например, микросхемы типа К 573 РФ 1,В качестве перемножителя 17 цифро вых сигналов могут быть использованымикросхемы 564 ИПЗ, а в качестве сумматора 16 - 564 ИМ 160 8Датчик нулевого положения представляет собой простейшее устройство, например, оптопара и сектор с проре- зью, которое служит для установки начального положения редуктора исполнительного механизма 10, с которого начинается его тарировка и контроль при возврате в исходное положение после отработки заданной программы,Устройство позволяет с высокой точностью, которая определяется точ" ностью измерения погрешностей 8кк и ь и объемом памяти запоминающего устройства, в которое записаны эти погрешности, производить позиционирование исполнительного механизма.Введение электрического дробления шага позволяет уменьшить число передаточных звеньев кинематической цепи исполнительного механизма н увеличить точность и воспроизводимость позиционирования при одинаковом объеме памяти запоминающего устройства, Уменьшение числа передаточных звеньев кинематической цепи повышает быстродействие устройства, что соответствует поставленной цели изобретения,Крбме того, за счет введения блока 6 электрического дробления шага значительно улучшается воспроизводимость перемещения, а введение блока выделе. ния и преобразования ЭДС вращения 8 и триггера 5 позволяет образовать локально-замкнутый шаговый электро- привод повьппенной устойчивости при колебаниях входных задающих частот и нагрузки. Блок выделения и преобразования ЭДС вращения обеспечивает надежность получения информации обратной связи и исключить аварийные ситуации, связанные с перегрузками шагового двигателя при работе исполнительного механизма. Устройство снижает затраты на его изготовление за счет упрощения устройства, а также повышает производительность,оборудо вання, в котором оно применяется за .счет повышения быстродействия устройФормула изобретения9 12 первым входом блока вьщеления разностного сигнала, к второму входу которого подключен выход блока коррекции положения, соединенного первым и вторым входами с первым и вторым запоминающими устройствами, усилитель мощности, подключенный к фазам шагового двигателя, вал которого соединен с исполнительным механизмом, о т л и ч а ю щ е е с я тем, что, с целью упрощения устройства и повышения его быстродействия, в него дополнительно ,введены блок электрического дробления шага, триггер, блок выделения и преобразования ЭДС вращения, реверсивный счетчик и датчик нулевого положения, при этом блок электрического дробления шага подключен первым и вторым входами к первому и второму выходам блока выделения разностного сигнала, а выходами - к входам усилителя мощности, первый установочный вход триггера соединен с выходом преобразователя код-частота, а выход - с третьим входом блока электрического дробления шага, первые входы блока вьщеления и преобразования ЭДС вращения подключены к входам усилителя мощности, а втоРые входы - к фазам шагового двигателя, вход направления реверсивного счетчика соединен с первым выходом блока выделения разностного сигнала, а счетный вход - с вторым установочным входом 67360 10триггера и с выходом блока вьщеленияи преобразования ЭДС вращения, выходдатчика нулевого положения подключенк установочному входу реверсивногосчетчика, соединенного выходом с адресным входом первого запоминающегоустройства и с третьим входом блокакоррекции положения.2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что блок выде"ления и преобразования ЭДС вращениясодержит усилители, коэффициент усиления которых равен коэффициентуусиленйя фаъных усилителей мощности, 15 дифференциальные. усилители, фильтрынижних частот, узел вьщеления минимального сигнала,компаратори источ-ник опорного напряжения, причем входы усилителей являются первыми вхо дами блока, неинвертирующие входыдифференциальных усилителей являютсявторыми входами блока, инвертирующиевходы дифференциальных усилителейсоединены с выходами соответствующих 25 усилителей, а выходы - через соответствующие Фильтры нижних частот свходами узла выделения минимальногосигнала, выход которого подключен кпервому входу компаратора, с вторым З 0 входом которого соединен источникопорного напряжения, при этом выходкомпаратора является выходом блокавыделения и преобразования ЭДС вращения.Реда Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 аз 5773/45 Тираж 836 ВНИИПИ Государствен па делам изобрет 113035, Москва, И-ЗПодписиого комитета СССРний и открытийРаушская наб., д
СмотретьЗаявка
3857564, 20.02.1985
ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ СВЕРХТВЕРДЫХ МАТЕРИАЛОВ АН УССР, КИЕВСКОЕ ПРОЕКТНО-КОНСТРУКТОРСКОЕ БЮРО АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ
ЗОЛОТУХИН АЛЕКСАНДР ВИТАЛЬЕВИЧ, МАНТУЛО АНАТОЛИЙ ПАВЛОВИЧ, ПОТЕМКИН ЮРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: позиционированием, программного
Опубликовано: 30.10.1986
Код ссылки
<a href="https://patents.su/7-1267360-ustrojjstvo-dlya-programmnogo-upravleniya-pozicionirovaniem.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления позиционированием</a>
Исполнительный механизм поддержания заданного положения стопора металлургической емкости

Номер патента: 944765
Опубликовано: 23.07.1982
Авторы: Галахов, Советников, Фетисов, Янков
МПК: B22D 41/20
Метки: емкости, заданного, исполнительный, металлургической, механизм, поддержания, положения, стопора
...в виде валика 14 с косыми шлицами 15 и гайки 16, в корпусе которой расположены подпружиненные шарики 17, обеспечивающие контакт с косыми шлицами 15, а также подпружиненный шарик 18 для контакта с призматическим стержнем 19, жестко соединенным с корпусом 6, Корпус гайки 16 центрируется в полости поршня 9 посредством безлюфтового развязывающего щарикоподшипника, образованного радиально-упорным шарикоподшипником 20 с разъемным подпружиненным наружным кольцом.Датчик 8 положения жестко без люфта соединен с валиком 14, удерживаемым от осевого смещения радиально-,упорным шарикоподшипником 21 с разъемным и подпружиненным наружным кольцом.Исполнительный механизм работает следующим образом.В процессе разливки требуемая подача металла в...
Система управления судовым главным двигателем и винтом регулируемого шага

Номер патента: 379452
Опубликовано: 01.01.1973
Автор: Басков
МПК: B63H 21/22, B63H 3/06
Метки: винтом, главным, двигателем, регулируемого, судовым, шага
...б - с регулятором 7 5 оборотов двигателя 8. Блок задания 1 такжесоединен с программным блоком 9, воздействующим через блок 10 регулирования нагрузки на блок переключения 11, связанный с сумматором 2. В регулирующую нагрузку двцга теля 8 входят датчики давления 12, соединенные с блоком 18 выделения максимального сигнала, взаимодействующим с блоком 10 регулирования нагрузки.Система управления работает следующим 15 образом.Формируемые в блоке задания 1 сцгцалыпоступают ца исполнительные механизмы 3 и б, которые, воздействуя соответственно ца механизм 4 и регулятор 7, устанавливают за данные шаг винта 5 и обороты двигателя 8,При изменении нагрузки двигателя 8 изменяются выходные сигналы датчиков давления 12, поступающие через блок 13...
Способ управления положением поворотных направляющих лопаток входного направляющего аппарата компрессора газотурбинного двигателя и устройство для его осуществления
Номер патента: 1588027
Опубликовано: 30.10.1994
Авторы: Алексеев, Панков, Тимкин
МПК: F04D 27/00
Метки: аппарата, входного, газотурбинного, двигателя, компрессора, лопаток, направляющего, направляющих, поворотных, положением
1. Способ управления положением поворотных направляющих лопаток входного направляющего аппарата компрессора газотурбинного двигателя путем измерения температуры воздуха на входе в двигатель и частот вращения вентилятора и компрессора, определения приведенной по температуре на входе в двигатель частоты вращения вентилятора, в функции которой определяется степень подогрева воздуха в вентиляторе, определения по степени подогрева воздуха в вентиляторе и температуре вохдуха на входе в двигатель температуры воздуха на входе в компрессор, определения приведенной по температуре воздуха на входе в компрессор частоты вращения компрессора и определения в функции ее значения угла поворота входного направляющего аппарата, формирования по значению угла...
Регулятор с ограничением расхода топлива при максимальной нагрузке в зависимости от частоты вращения для топливных насосов дизельных двигателей

Номер патента: 1067237
Опубликовано: 15.01.1984
Автор: Клаус
МПК: F02D 1/04
Метки: вращения, двигателей, дизельных, зависимости, максимальной, нагрузке, насосов, ограничением, расхода, регулятор, топлива, топливных, частоты
...15 он связан с опорой 6, в корпусе при помощи упоров 6 б,. Центробежный исполнительный орган 190 располо. жен на приводном валу 20 топливного насоса. В этом центробежном исполнительном органе 90 расположены центробежные массы 19, которые при помощи рычага 18 свя 45 50 55 Поставленная цель достигается тем, что регулятор с ограничением расхода топлива при максимальной нагрузке в зависимости от частоты вращения для топливных насосов дизельных двигателей, содержащий центробежный исполнительный орган с установочным штифтом, выполненным с возможностью перемещения при повышении частоты вращения в сторону топливного насоса, регулирующую рейку, связанную с исполнительным органом, выполненным в виде двуплечего рычага, при повороте верхней...
Датчик знака эдс вращения вентильного электродвигателя

Номер патента: 1658307
Опубликовано: 23.06.1991
Авторы: Безрукина, Богатова, Корабельников, Мезенцев, Митлин
МПК: H02K 29/06, H02P 6/02
Метки: вентильного, вращения, датчик, знака, эдс, электродвигателя
...напряжения, который может быть выполнен ь виде делителя напряжения на обратно включенных диодах 11 (фиг.2) или на транзисторном каскаде 12 (фиг,3)Датчик знака ЭДС вращения работает следующим образом.В отсутствии сигналов ЭДС вращений (ротор неподвижен) ведет себя как мульти- вибратор, генерируя последовательность импульсов пуска и провоцируя начальное вращение ротора. После пуска двигателя при поступлении на вход датчика сигналов ЭДС вращения схема ведет себя как компаратор, причем в момент формирования фронта, т.е. в линейном режиме усиления, имеет свойства форсирующего звена, что улучшает форму выходных импульсов,Период автоколебаний (при пуске двигателя) при соблюдении соотношения Вз В 4 определяется выражениемВ 4Т =2 - В 7...
Предыдущий патент: Устройство для программного управления загрузкой
Следующий патент: Многоканальное устройство для программного управления электрохимическим процессом маркирования
Случайный патент: Устройство для отклонения рентгеновского пучка