Способ программного управления приводом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1403330
Авторы: Гониашвили, Ивоботенко, Кожин

Текст
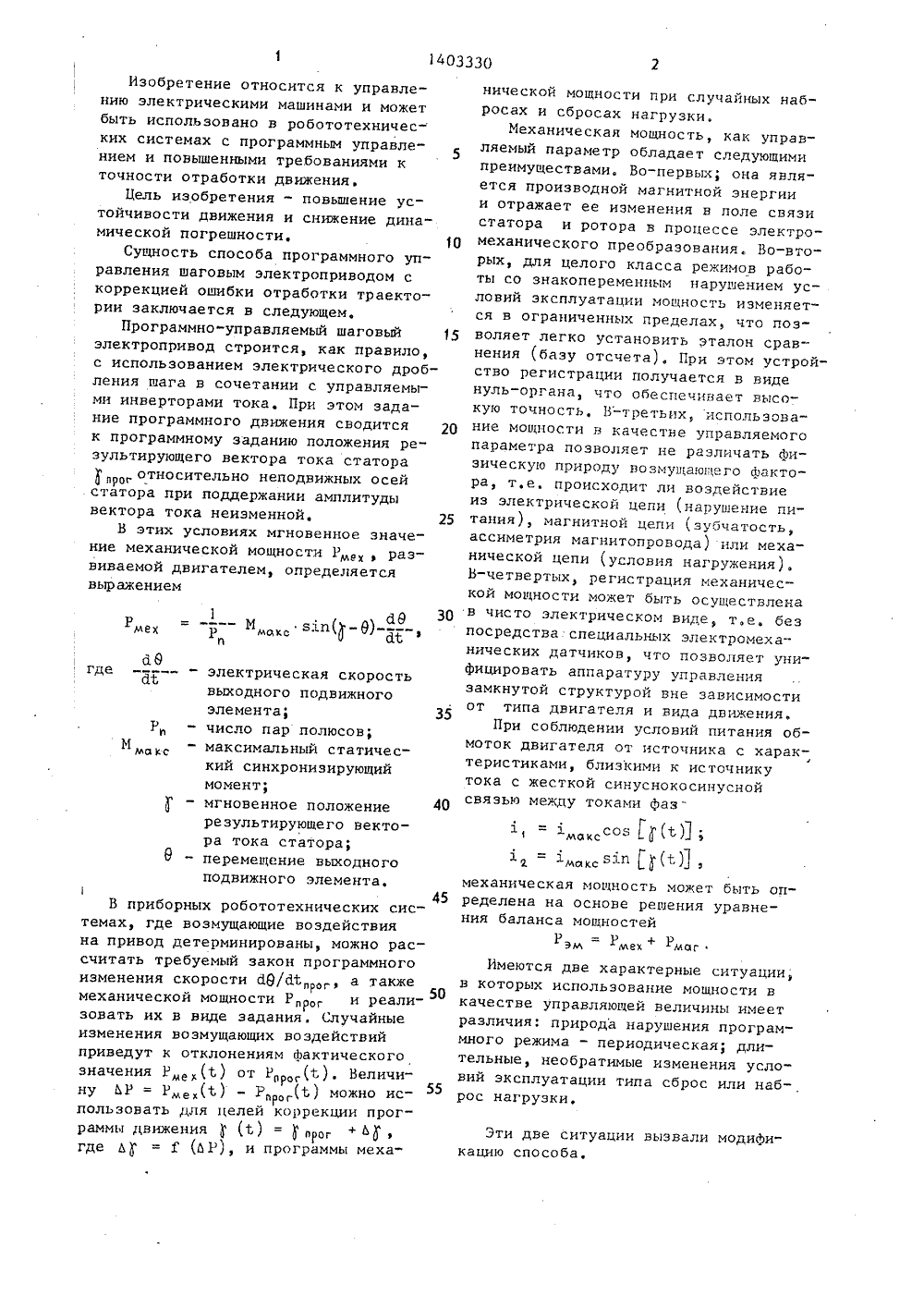
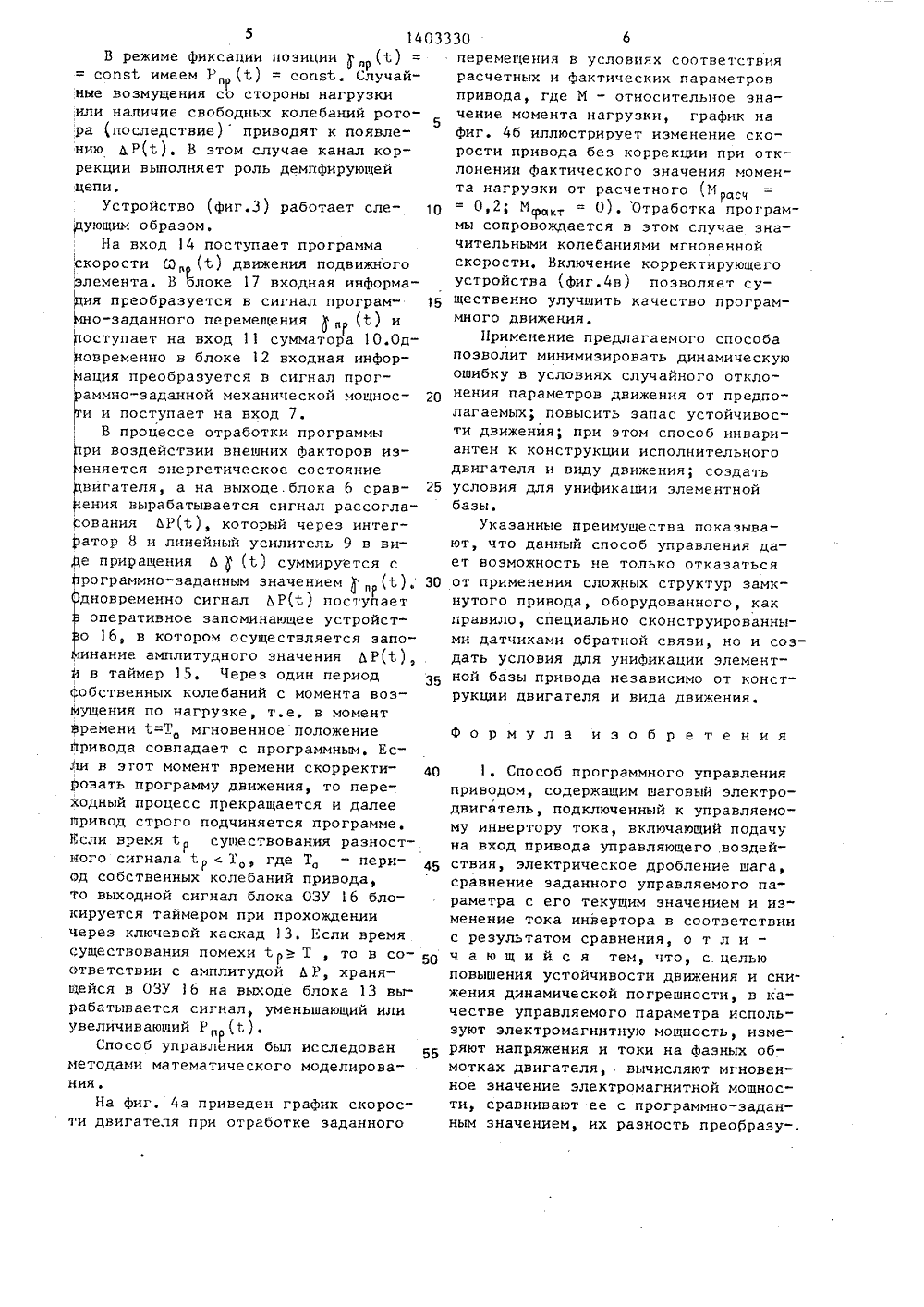
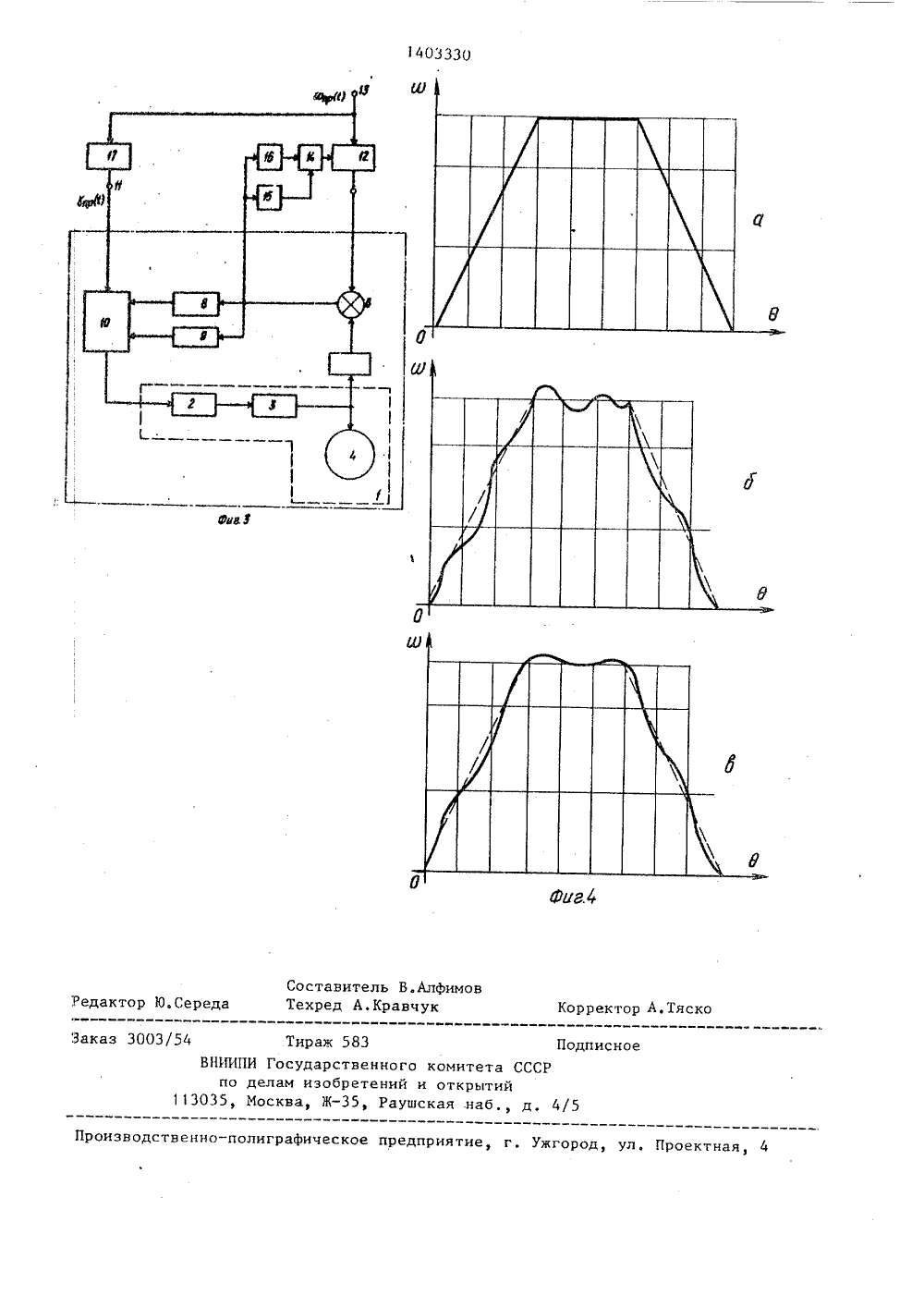
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧ ЕСНРЕСПУБЛИК 4 Н 02 Р 8 ЕНИЯ(21) 41 (22) 2 Ь (4 Ь) 15 (71) Мо тут 73 О 7/24-О 12,8 Ь ОЬ.88, Бю ковский э М 2 инсти гетичес и ( ( ко В.Ф.е. М.; ей с 1 ошоСогреп,УПРАВЛЕН ся к областить использоустановках с нклю ми. Ц тойчи л ост ГОСУДАРСТВЕННЫИ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ(72) Б.А.Ивоботенко, С,С.КожЗ,С,ГониашвиЛи53) 621,313.525 (088.8)56) Инобоженко Б.А., КозачеШаговый привод в робототехниизд-но МЭИ, 1984, с.64-95.2. ВесЫ 1 е В. еЬ а 1. 1)е 1 аней моор ясЬене Гог з 1 еррпясоп 1 го 1. 1 ВМ 1 Без апб Рее 11976, 20, И 3, 235-243.(57) Изобретение относитэлектротехники и может бвано в робототехническихпрограммным управлением,электропринод с синхроннности с шаговыми днигатеизобретения - повышение движения и снижение динамическо погрешности. Способ программного управления приводом, содержащим шаговый электродвигатель, подключенный вЯОдо 1403330 к управляемому иннертору тока, включает подачу на вход привода управляющего воздействия, электрическое дробление шага, сравнение заданного управляемого параметра с его текуц 1 имзначением и изменение тока инверторав соответствии с результатом сравнения, В качестве управляемого параметра используют электромагнитную моцность, измеряют напряжение и токи наразных обмотках двигателя, вычисляютмгновенное значение электромагнитноймощности, сравнивают ее с программнозаданным значением, их разность преобразуют в сигнал коррекции, которыйдобавляют к программно-заданному управляющему ноздейстнию. Для преобразования разностного сигнала н сигналкоррекции интегрируют разностный сигнал и суммируют его с результатоминтегрирования. Способ программногоуправления приводом позволяет повысить устойчивость движения, снизитьдинамическую погрешность, отказаться от датчиков обратной связи по положению подвижного элемента и унифицировать структуру привода независимо от конструкции двигателя. 3 з.п.ф-лы. 4 ил.Изобретение относится к управлению электрическими машинами и может быть использовано в робототехничес- ких системах с программным управле"5 нием и повышенными требованиями к точности отработки движения.Цель изобретения - повышение устойчивости движения и снижение динамической погрешности. 10Сущность способа программного управления шаговым электроприводом с коррекцией ошибки отработки траектории заключается в следующем.Программно-управляемый шаговый электропривод строится, как правило, с использованием электрического дробления шага в сочетании с управляемыми инверторами тока. При этом задание программного движения сводится 20 к программному заданию положения результирующего вектора тока статораотносительно неподвижных осей статора при поддержании амплитуды вектора тока неизменной. 25В этих условиях мгновенное значение механической мощности Р развиваемой двигателем, определяется выражением ае Зо -- М зз.п( - 9) - - - р максС ф 1 мех где электрическая скоростьвыходного подвижногоэлемента;число пар полюсов;максимальный статический синхронизирующиймомент;мгновенное положение Р ма кс40 результирующего вектора тока статора;перемещение выходного подвижного элемента,45В приборных робототехнических системах, где возмущающие воздействия на привод детерминированы, можно рассчитать требуемый закон программного изменения скорости 69 Жп , а также50 механической мощности Рпр, и реализовать их в виде задания. Случайные изменения возмущающих воздействий приведут к отклонениям фактического значения Р (С) от Р (С ). Величиме х прог55 НУ Р = Рме к(С ) - Рп ог(С ) можно использовать для целей коррекции программы движения(С) =прог +где Ь = 1 (ЬР), и программы механической мощности при случайных набросах и сбросах нагрузки,Механическая мощность, как управляемый параметр обладает следующимипреимуществами. Во-первых; она является производной магнитной энергиии отражает ее изменения в поле связистатора и ротора в процессе электромеханического преобразования. Во-вторых, для целого класса режимов работы со знакопеременным нарушением условий эксплуатации мощность изменяется в ограниченных пределах, что позволяет легко установить эталон сравнения (базу отсчета), При этом устройство регистрации получается в виденуль-органа, что обеспечивает высокую точность, В-третьих, использование мощности в качестве управляемогопараметра позволяет не различать физическую природу возмущающего фактора, т,е. происходит ли воздействиеиз электрической цепи (нарушение питания), магнитной цепи (зубчатость,ассиметрия магннтопровода) или механической цепи (условия нагружения).В-четвертых, регистрация механической мощности может быть осуществленав чисто электрическом виде, т.е, безпосредства специальных электромеханических датчиков, что позволяет унифицировать аппаратуру управлениязамкнутой структурой вне зависимостиот типа двигателя и вида движения,При соблюдении условий питания обмоток двигателя от источника с харак 4теристиками, близкими к источникутока с жесткой синуснокосинуснойсвязью между токами фаз"макс( ) ф1 максз( ) фмеханическая мощность может бить определена на основе решения уравнения баланса мощностейРэм Рмек + РмагИмеются две характерные ситуации, в которых использование мощности в качестве управляющей величины имеет различия: природа нарушения программного режима - периодическая; длительные, необратимые изменения условий эксплуатации типа сброс или наброс нагрузки.Эти две ситуации вызвали модификацию способа, 1403 330В цсрном сл 1 ча эталоццая неличица мощности, прицимаемая за базусравнения и задания, программно остается неизменной Во втором случаепрограммно-заданная мощность подвергается коррекции.На фиг.1 изображена модель 2-хфазного электродвигателя с независимым возбуждением; на Фиг.2 - схема 1 Оустройства программного управления;на фиг.З - устройство с коррекциейпрограммно-заданной мощности; нафиг,4 (а,б,в) - графики моделирования работы устройства, 15Устройство программного управления (фиг,2) состоит из блока 1 управления разомкнутого шагоного привода,включающего узел 2 электрическогодробления шага, управляемый иннертор 203 тока и шагоный двигатель 4, Электрические входы шагового двигателясоединены дополнительно с блоком 5вычисления электромагнитной мощностиза вычетом мощности потерь, выход которого подключен к одному из входовблока Ь сравнения, Второй вход блокасравнения является входом 7 устройства программного задания механическоймощности Р (С), Выход блока 6 сравнения через интегратор 8 и линейныйусилитель 9 соединен с сумматором 10,третий вход 11 которого является входом устройства для задания программы движения(С ). Выход блока 10соединен с входом узла 2 электрического дробления шага,Устройство с коррекцией программно-заданцой мощности (фиг.З) содержит блок 12, подключенный выходом 40к входу 7 и преобразующим программнозаданное ца первом входе 13 значениескорости Я п(С) н задаваемое значение механической мощности Р(С),другой вход блока 12 через ключевой 45каскад 14, таймер 15 и оперативноезапоминающее устройство 16 подключенк выходу блока 6 сравнения, и блоком17 - преобразователем программно-заданного значения скорости в программно"заданное значение перемещенияпривода. Вход блока 17 соединен свходом 13 устройства, а выход - свходом 1 Г сумматора 10,Устройство (фиг.2) работает следующим образом.На входы 7 и 10 параллельно отпрограммного носителя поступают дваинформационных потока, содержащие лаццые о требуемом перемещении е(С) (нход 11)и о соответствующем ему программном значении механической мощности Р (С) (вход 7), Каждойкоманде на входе 10 устройства соответствует определенное положение результирующего вектора тока 1( ) и реальная механическая координата 6 . Плотность электромеханических мехсостояний зависит от разрешающей способности блока 2 электрического дробления шага, преобразующего дискретные команды в уровни таков, и блока 3 инвертора тока, обеспечивающего заданные уровни тока непосредственно в фазных обмотках шагового двигателя,В процессе отработки программы (С) электрическое состояние шагового двигателя меняется. Для контроля этого состояния одновременно во всех включенных фазах шагового двигателя измеряются токи и напряжения, а затем в блоке 5 рассчитывается мгновенное значение механической мощности,г, ж, . а,В + Ь-- - Ь.Ж аС фгде 11 0 5- напряжение нафазах и токи фаз; Я, Ъ - активноесопротивление и индуктивность фазы.Полученная в,результате расчетареальная механическая мощность сравнивается н блоке 6 с программно-заданной, Результат сравнения 6 Р(С)= Р (С) - Р,е(С), с выхода блока6 сравнения через интегратор 8 и линейный усилитель поступает на сумматор 9, где с учетом знака складывается с числом, представляющим прогрвм"му движения(С).Математическое моделирование, по-.казало, что пропорциональноинтеграль"ная функцияьу, = к,ьр(с) + к,(ара,ореализуемая в результате суммирования сигналов интеграторан и линейного усилителя, оптимизируется приК, = 30, К = 60-100. Результатсуммирования поступает на вход блока 2 дробления шага, При этом резуль"тирующий вектор тока 1 получаеткорректирующее смещение относительнопрограммного состояния 1п в направлении уменьшенияР(С),5 14033В режиме фиксации позиции(1) сопз 1 имеем Р (1) = сопят, Случайпр ные возмущения со стороны нагрузки или наличие свободных колебаний рото 5 ра (последствие) приводят к появлению ДР(С). В этом случае канал коррекции выполняет роль демпфирующей цепи,Устройство (фиг.3) работает сле 1 цующим образом,На вход 4 поступает программа скорости Я, (1) движения подвижного элемента. В блоке 17 входная информасия преобразуется в сигнал програм Йно-заданного перемещения(1) и ггоступает на вход 11 сумматора 10.0 дгговременно в блоке 12 входная информация преобразуется в сигнал прог аммно-заданной механической мощнос и и поступает на вход 7.В процессе отработки программы угри воздействии внешних Факторов изеняется энергетическое состояние двигателя, а на выходе. блока 6 срав гения вырабатывается сигнал рассогласования ЬР(1), который через интегратор 8 и линейный усилитель 9 в виде придац 1 ения Ь(г,) суммируется с программно-заданным значением(1), 30 (одновременно сигнал ДР(т,) постуйаетоперативное запоминающее устройсто 16, в котором осуществляется эапоинание амплитудного значения Д Р(1), й в таймер 15. Через один период Собственных колебаний с момента возмущения по нагрузке, т,е, в момент времени т,=Т мгновенное положение привода совпадает с программным. Если в этот момент времени скорректи ровать программу движения, то переходный процесс прекращается и далее ггривод строго подчиняется программе, Если время 1 р существования разностного сигнала. гр с То, где Т, - пери" 45 од собственных колебаний привода, то выходной сигнал блока ОЗУ 16 блокируется таймером при прохождении через ключевой каскад 13. Если время существования помехи 1 р Т , то в со ответствии с амплитудой Ь Р, хранящейся в ОЗУ 16 на выходе блока 13 вырабатывается сигнал, уменьшающий или увеличивающий Р (1).Способ управления был исследован методами математического моделирования,На Фиг. 4 а приведен график скорости двигателя при отработке заданного 30перемещения в условиях соответствия расчетных и Фактических параметров привода, где М - относительное значение момента нагрузки, график на Фиг. 4 б иллюстрирует изменение скорости привода беэ коррекции при отклонении фактического значения момента нагрузки от расчетного (М ц0,2; М р = О), Отработка программы сопровождается в этом случае значительными колебаниями мгновенной скорости. Включение корректирующего устройства (фиг.4 в) позволяет существенно улучшить качество программного движения.Применение предлагаемого способа позволит минимизировать динамическую ошибку в условиях случайного отклонения параметров движения от предполагаемых; повысить запас устойчивости движения; при этом способ инвариантен к конструкции исполнительного двигателя и виду движения; создать условия для унификации элементной базы.Указанные преимущества показывают, что данный способ управления дает воэможность не только отказатьсяот применения сложных структур замкнутого привода, оборудованного, как правило, специально сконструированными датчиками обратной связи, но и создать условия для унификации элементной базы привода независимо от конструкции двигателя и вида движения.Формула изобретения1 Способ программного управления приводом, содержащим наговый электродвигатель, подключенный к управляемому инвертору тока, включающий подачу на вход привода управляющего воздействия, электрическое дробление нага, сравнение заданного управляемого параметра с его текущим значением и изменение тока инвертора в соответствии с результатом сравнения, о т л и - ч а ю щ и й с я тем, что, с. целью повышения устойчивости движения и снижения динамической погрешности, в качестве управляемого параметра используют электромагнитную мощность, измеряют напряжения и токи на фазных обмотках двигателя, вычисляют мгновенное значение электромагнитной мощности, сравнивают ее с программно-заданным значением, их разность преобразу-,1403330 Рие 1 Вод программ ют в сигнал коррекции, который добавляют к программно-заданному управляющему воздействию.2. Способ по и 1, о т л и ч а ющ и й с я тем, что для преобразования разностного сигнала в сигнал коррекции, интегрируют разностный сигнал и суммируют его с результатом интегрирования,3. Способ по п.1, о т л и ч а ющ и й с я тем, что задают програм" мное значение скорости привода, по которому определяют заданное эначение мощности, преобразуют разность заданной и действительной мощностей во второй сигнал коррекции, который 5суммируют с заданным значением мощности.4. Способ по и 3, отличающ и й с я тем, что для преобразования разности заданной и действительной мощностей во второй сигнал коррекции, измеряют амплитудное значение разностного сигнала, запоминают его на время, кратное периоду собственных колебаний, и затем суммируют с заданным значением мощности.403330 Составитель В.Алф Техред А.Кравчук м орректор А,Тяск дактор Ю.Серед Заказ 30 8 одписное енно-полиграфическое предприятие, г. Ужгород, ул, Проек изво 4 Тира ВНИИПИ Госуда по делам из 13035, Москва, ственного кбретений и-35, Раушск митета СССткрытийя .наб., д.
СмотретьЗаявка
4167307, 26.12.1986
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
ИВОБОТЕНКО БОРИС АЛЕКСЕЕВИЧ, КОЖИН СЕРГЕЙ СЕРГЕЕВИЧ, ГОНИАШВИЛИ ЭЛИЗБАР СЕМЕНОВИЧ
МПК / Метки
МПК: H02P 8/12
Метки: приводом, программного
Опубликовано: 15.06.1988
Код ссылки
<a href="https://patents.su/6-1403330-sposob-programmnogo-upravleniya-privodom.html" target="_blank" rel="follow" title="База патентов СССР">Способ программного управления приводом</a>
Подвеска силового агрегата переднеприводного автомобиля с поперечным расположением двигателя и полуосями привода колес неравной длины

Номер патента: 1600973
Опубликовано: 23.10.1990
МПК: B60K 5/12
Метки: автомобиля, агрегата, двигателя, длины, колес, неравной, переднеприводного, подвеска, полуосями, поперечным, привода, расположением, силового
...двигателя 2 и расположена на поперечине передка кузова.Подвеска силового агрегата работает следующим образом.При разгоне автомобиля под действием момента от сиды инерции Р и реактивного момента И силовой агрегат1 перемещается в пространстве. Перемещения в продольной вертикальной40плоскости невелики из-за достаточнобольшой жесткости опор 11 и 12 и невлияют на наклон осей валов дифференциала 5. Перемещения в поперечнойвертикальной плоскости из-за разворо 45та вокруг оси, проходящей через центры опор 11 и 12, приводят к наклону.осей валов дифференциала 5 и уменьшению разницы углов в наружных ивнутренних шарнирах,50 При этом жесткость опоры 13 подбирается такой, чтобы при повороте двигателя под действием момента от сил инерции и...
Способ регулирования мощности энергетического блока сверхкритических параметров

Номер патента: 1722240
Опубликовано: 23.03.1992
Автор: Джон
МПК: F01K 13/02
Метки: блока, мощности, параметров, сверхкритических, энергетического
...значением и вторым заданным сверхкритическим значением, превышающим первое (кривые Б, на фиг. 2).Возможно также регулирование мощности блока, когда регулирующий клапан 5 турбины остается полностью открытым при изменении мощности приблизительно в диапазоне от 85 до 100 фноминальной мощности с изменением давления пара в указанных пределах,Регулирование мощности в диапазоне ниже 65 номинальной мощности осуществляют изменением степени открытия разделительного клапана 1. Путем частичного закрытия этого клапана давление пара, подаваемого на частично открытый регулирующий клапан 5 турбины, уменьшают до уровня ниже критического значения, в результате чего понижается давление на входе части 6 высокого давления турбины. Разделительный...
Способ настройки привода с механическим усилителем мощности

Номер патента: 341993
Опубликовано: 01.01.1972
Авторы: Гейшерик, Кобринский, Кожин, Коренд, Левковский
МПК: F16H 1/16
Метки: механическим, мощности, настройки, привода, усилителем
...т) П мет 5- Ытб 2 2б гд де Ь, - коэффициент в го вала усилит Ьг - коэффициент ного вала усил Й - внутренний к усилителя, язкого трения входноля;язкого трения выходтеля;оэффициент усиления 25 т) Изобретение относится к машиностроению и может быть использовано в приводах, со. держащих усилитель мощности.Известен опособ настройки привода с механическим усилителем мощности и самотормозящейся передачей, заключающийся в том, что настройку привода осуществляют путем изменения параметров привода, например силы сухого трения, в результате чего изменяется положение границы самоторможения и соответственно усилительные свойства привода.Для улучшения динамических, точностных и усилительных показателей привода изменяют коэффициенты вязкого трения на...
Устройство для контроля и регулирования параметров

Номер патента: 1249491
Опубликовано: 07.08.1986
Авторы: Ефимов, Нестерук, Потапов
МПК: G06F 11/14
Метки: параметров
...нулевой код, изменяет ЗОего значение на 11 и приводит кпоявлению сигнала на выходе перемножения регистра. Данный. сигнал, пройдя через девятый элемент 26 ИЛИ, пос.тупает на счетный вход счетчика 1.5адреса и увеличивает его содержимоена единицу, Таким образом, на адресных входах блоков 1 - 4 постояннойпамяти адрес уставок сформирован,В восьмом такте на адресных выхо- щОдах 17 устройства появляется унитарный код, определяющийся подключающийся к входам 66 кода параметра датчик.В этом же такте код адреса контролируемого параметра 1,адрес коррекции) 45с выхода счетчика 15 адреса появляется на выходах второго коммутатора 42,так как на одном из входов седьмогоэлемента 32 И присутствует логическая "1" с единичного выхода триггера 5045, а на...
Многоканальный усилитель мощности для управления шаговым двигателем

Номер патента: 782116
Опубликовано: 23.11.1980
МПК: H02P 8/12
Метки: двигателем, многоканальный, мощности, усилитель, шаговым
...узлов привода и ухудшает качество 5движения рабочего органа привода. Снижение степени форсирования тока в обмотке шагового двигателя для повышенияплавности движения ротора двигателя вобласти низких частот управляющих им- тОпульсов приводитв устройстве к ухудшению динамических характеристик шагового двигателя.Цель изобретения - уменьшение колебаний скорости шагового двигателя. т 5Поставленная цель достигается тем,что в каждый канал основного многоканального усилителя мощности дополнительно введен генератор пилообразного напряжения, компаратор и блок выбора максимального тэигнала, соединенный первымсвоим входом с выходом генератора пилообразного напряжения, подключенноговходом ко входу основного ключевого элеСоставитель 3. ГоринТерхед,...
Предыдущий патент: Устройство для управления шаговым двигателем
Следующий патент: Устройство для управления шаговым двигателем
Случайный патент: Сенсорная клавиатура