Устройство для управления адаптивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
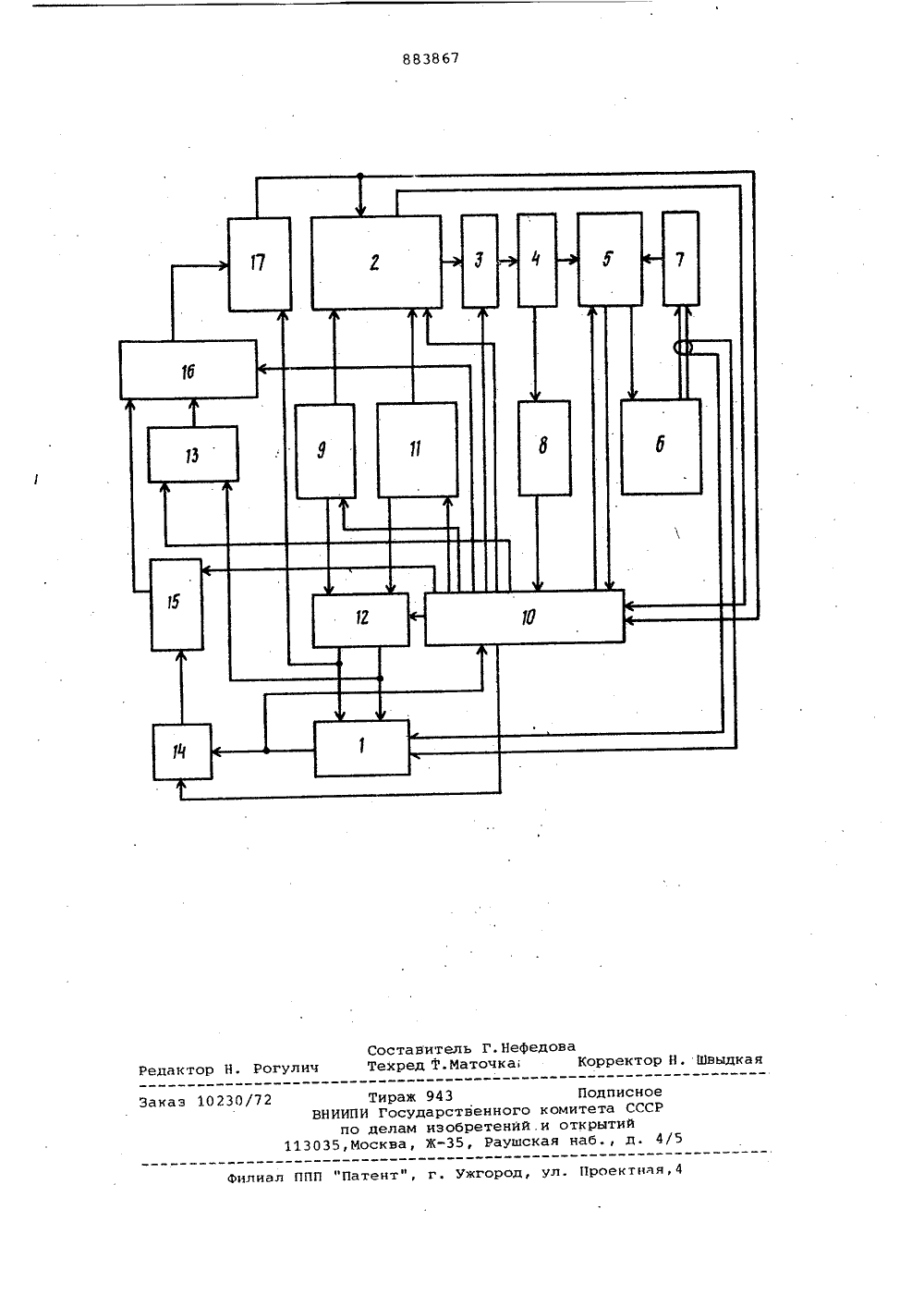
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИ ИТИЯЬСТВУ Союз Сфветскик Сфциалистнческии Республик(51) М. Кл. 6 05 В 19/00В 25 ,3 9/00 Государственный комитет СССР по аслам изобретениИ и открытиИ(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ Изобретение относится к робототехнике и может быть использовано для управления адаптивным промышленным роботом при автоматиэапии производственных процессов.По основному авт.св. 9 704775 известно устройство для управления адаптивным роботом, содержащее последовательно соединенные блок ввода иэображения, установленный на схвате исполнительного органа робота, операционный блок, коммутатор команд, блок памяти, блок формирования сигналов перемещения, приводы и блок датчиков положения исполнительного органа, выход которого, подключен ко второму входу блока формирования сигналов перемещения, второй выход блока памяти соединен со входом нуль-органа, блок круговой развертки и последовательно соединенные блок управления, блок формирования прямоугольного растра и коммутатор раэверток, выход которого подключен ко входу блока ввода изображения, а второй вход - к первому выходу блока круговой развертки, второй выход которого соединен со вторым входом операционного блока, второй выход которого соединен с первым 2входом блока управления, второй входкоторого соединен со вторым выходомблока формирования сигналов перемещения, третий вход - с выходом нульоргана, второй выход. - с третьим входом блока, формирования сигналов перемещения, третий выход - со вторымвходом коммутатора команд, четвертыйвыход - с третьим входом операционного блока, пятый выход - со входомблока круговой развертки, а шестойвыход - с третьим входом коммутатора разверток 111 .Недостатком известного устройства 15 являются узкие функциональные воэможности, заключающиеся в отсутствиивозможности захвата неориентированных деталей в случае, если в зонеобзора робота одновременно находит ся несколько деталей. Это требуетнеобходимости обеспечения наличиялишь одной детали в зоне обзора, чтосущественно усложняет вспомогательноеоборудование, обслуживающее технологический процесс.Цель изобретения - расширениефункциональных воэможностей устройства.Поставленная цель достигается 30 тем, что устройство содержит сумматори последовательно соединенные элемент И, сдвигаюций регистр, второй блок памяти и селектбр-мультиплексер, второй вход которого соединен с первым выходом коммутатора разверток, а выход - с первым входом операционного блока и четвертым входом блока управления, пятый вход которого соединен с выходом блока ввода изображения, седьмой выход - со вторым входом второго блока памяти, восьмой выход - с первым входом сумматора,девятый выход - со вторым входом сдвигающего регистра, а десятый выход с первым входом элемента И, второй вход которого подключен к выходу блока ввода изображения, второй вход которого соединен со вторым выходом коммутатора разверток и со вторым входом сумматора, выход которого подключен к третьему входу второго блока памяти, а второй выход блока Формирования прямоугольного растра соединен с четвертым входом операционного блока.На .чертеже представлена Функциональная схема устройства.Устройство содержит блок 1 ввода изображения, операционный блок 2, коммутатор 3 команд, блок 4 памяти, блок 5 Формирования сигналов перемецения, приводы 6, блок 7 датчиков положения, куль-орган 8, блок 9 круговой развертки, блок 10 управления, блок 11 Формирования прямоугольного растра, коммутатор 12 разверток,сумматор 13,элемент И 14, сдвигающий регистр 15, второй блок 16 памяти, селектор-мультиплексор 17.Устройство работает следующим образом.Положение деталей на рабочей поверхности определяется координатамиих центров тяжести Х,Ч и углами ориентации осей симметрии деталей относительно некоторой линии отсчета. Ь некоторый момент времени манипулятор может обеспечивать захват лишь одной детали. В соответствии с этим, для ее захвата устройство обеспечивает вычисление координат центра тяжести и угла ориентации. Для этого необходимо селектировать изображение этой детали из группового изображения деталей. Процесс селекции иэображения одной детали, из группового изображения деталей, начинается с момента поступления импульса передачи управления из блока 5 формирования сигналов перемещения в блок 10 управления. При расположении блока 1 ввода изображения в схвате робота это свидетельствует о выходе схвата в центр заданной зоны обзора. Селекция группового изображения осуществляется путем обработки оптической информации о положении деталей в зоне обзора, формируемой блохом 1,чувствительным элементом блока 1 являетсяФотоприемная матрица, на матричное)оточувствительное поле которой спомощью объектива проецируется изображение деталей,С началом работы устройства блок10 запускает блок 11 Формированияпрямоугольного растра. Выходные сигналы блока 11 поступают на вход коммутатора 12 разверток.Под действием сигнала, поступающего из блока 10 на вход коммутатора12, выходные сигналы блока 11 черезкоммутатор 12 подаются,на вход блока 1. Это обеспечивает последовательный построчный выбор элементов инФормационного поля фотоприемной матрицы для анализа оптической информа-,ции, воздействующей на них. Значенияоптической информации; воздействующей20 на элементы некоторой строки информационного поля матрицы, записываются в сдвигающий регистр 15. Есликадр изображения имеет а Х и элементов разложения, где щ - количество25 строк разложения, а и - количествоэлементов разложения в строке, тосдвигающий регистр имеет емкостьв и разрядов,В конце каждой текУщей строкиинформационного поля матрицы оптическая информация, накопленная всдвигающем регистре 15, переписывается в предыдущую строку информационного поля второго блока 16 памяти, емкость которого составляетщ х и бит. Запись информации в предыдущую строку информационного полявторого блока 16 памяти обеспечивается с помощью сумматора 13, осуще -ствляющего в процессе селекции вычи 4 О тание единицы из кода, поступающегос выхода коммутатора 12 развертокна вход блока 1.Последовательный ввод нулевойоптической информации в сдвигающий45 регистр 15 в процессе анализа кадраизображения осуществляется до появления первого видеосигнала, равногологической единице, что соответствует появлению некоторой деталипо .текущей строке информационногополя фотоприемной матрицы. Послеэтого осуществляется формированиеизображения этой детали на даннойстроке, Блок 10 управления выделяетмомент окончания изображения деталипо строке и вырабатывает сигнал,запирающий элемент И 14, до окончания текущей строки сканирования.Этообеспечивает запись в сдвигающийрегистр 15 значений оптической инбО формации, равным логическому нулю,.независимо от наличия других деталейна этой строке. При анализе следующей строки информационного поляматрицы блок 10 открывает элемент И 14.Аналогично рассмотренному,обеспечивается прием логических значений оптической информации на этой строке в сдвигающий регистр 15, При этом в блоке 10 осуществляется сравнение логических значений оптической информации, воздействовавших на соответствующие элементы предыдущей строки информационного поля матрицы, поступающих с информационного поля второго блока 16 с логическими значениями оптической информации,воэ" действующих на соответствующие элемен ты текущей строки информационного поля матрицы. Последовательная соответствующая выборка квантованного видеосигнала из второго блока 16 памяти осуществляется с помощью селектора-мультиплексора 17, управляемого параллельно с блоком 1 кодами, поступающими с выхода коммутатора 12 разверток и определяющими выбор эле-: 20 мента на строке информационного поля матрицы. Изображение детали на предыдущей строке информационного поля матрицы, 25 извлекаемое из второго блока 16 памяти устанавливает границы изображения детали, селекция изображения которой уже начата. Таким образом,в результате сравнения видеосигналов ЗО из второго блока 16 памяти и блока 1 ввода изображения определяется принадлежностью некоторого изображения на текущей строке, к изображению селектируемой детали. Если изображения каких-то деталей на текущей строке информационного поля матрицы не попадают в границы, установленные по предыдущей строке, то это изображение не является изображением селектируемой детали и по его 40 окончанию блок 10 управления осуществляет сброс сдвигающего регистра 15. Если же изображение детали, Формируемое блоком 1 на текущей строке, находится в пределах установленных границ, то после его окончания на данной строке блок 10 управления закрывает элемент И 14, что соответствует заполнению до конца строки нулевой видеоинформацией сдвигающего регистра 15. Таким образом, изображение селектируемой детали на этой строке информационного поля матрицы остается в сдвигающем регистре 15, и аналогич но описанному, в конце строки переписывается во второй блок 16 памяти. Если одно из изображений деталей на текущей строке информационного поля матрицы не попадает в установленные Ь 0 границы, то это означает, что селекция изображения данной детали закончена и блок 10 управления запирает элемент И 14 до конца кадра сканирования, что соответствует дальнейшему заполнению второго блока 16памяти логическими значениями оптической информации, соответствующими отсутствию изображения деталей.По окончании кадра сканированияво втором блоке 16 хранится селектированное изображение одной детали,путем обработки которого устройствовычисляет координаты центра тяжестии угол ориентации оси симметрии этойдетали.Для этого по окончании процессаселекции изображения одной деталиблок 10 управления переводит устройство в режим вычисления координатцентра тяжести детали. При этом сигналом с выхода блока 10 блокируетсязапись информации во второй блок 16и вычитание единицы, выполняемое сумматором 13 в режиме селекции. Этообесцечивает сохранность селектированного изображения детали во второмблоке 16 памяти и синхронный выборего элементов в процессе вычислениякоординат центра тяжести детали.Процесс вычисления координат центра тяжести селектированной детали начинаетсч по сигналу, которым блок 10запускает блок 11 Формирования прямоугольного растра. Выходные сигналы блока 11 поступают на вход коммутатора 12 разверток. Под действием сигналов, поступающих из блока,10 на входы коммутатора 12 выходные сигналы блока 11 через коммутатор 12 подаются через сумматор 13, осуществляющий в этом режиме вычитание нуля .из поступающего кода, на адресные шины второго блока 16 памяти и на адресные шины селектор".,-мультиплексора 17, На основании логических значений сигналов поступающих через селектор- мультиплексор 17 с выхода второго блока 16 памяти и с выхода блока 11, операционный. блок 2 Вычисляет значение координат центра тяжести селектированной детали.По окончании вычисления координаты Хс с выхода операционного блока 2 на вход блока 10 управления поступает сигнал, свидетельствующий об этом, и блок 10 через коммутатор 3 команд обеспечивает запись информации о координате селектированной детали с выхода операционного блока 2 в соответствующую ячейку блока 4 памяти. После этого блок 10 переключает коммутатор 3 команд и коммутатор 12 разверток в режим определения Ч, Вычисление и запись. информации об Ц в блок 4 памяти осуществляется аналогично Хс, После вычисления координат центра тяжести блок управления 10 выцает в блок формирования сигналов перемещения 5 команду на отработку полученной инфор-. мации.В процессе отработки этой информации схват робота с установленным5 30 15 20 на нем блоком 1 перемещается в позицию, находящуюся над центром тяжести детали. В момент окончания отработки информации о центре тяжести селектированной детали, что фиксируется по совпадению информации, выданной на отработку инйормации, полученной с датчиков 7 положения исполнительного органа робота, из блока 5 формирования сигналов перемещеиия в блок 10 поступает импульс конца отработйиПо этому сигналу блок 10 снова выпает команду на селекцию изображения одной детали. Процесс селекции изображения происходит аналогично описанному, По окончании селекции блок 10 переводит устройство в режим вычисления координат центра тяжести селектированной детали, что необходимо для контроля совершенного движения и повышения помехоустойчивости устройства адаптивного управления. При определении в последующем цикле вычислений нулевых значений координат центра тяжести срабатывает нуль-орган 8. Под воздействием сигнала с выхода нуль-органа 8 блок 10 включает устройство в режим определения угла ориентации детали.В режиме определения угла ориентации блок 10 запускает блок 9 круговой развертки. Выходные сигналы с блока 9 поступают на входы коммутатора 12 разверток. Управляющие сигналы, поступающие из блока 10 в режиме определения угла ориентации детали на вход коммутатора 12 разверток, обеспечивают прохождение сигналов с первой группы выходов блока 9 на выход коммутатора 12. Одновременно на второй группе выходов блока 9 вырабатываются значения угловых расстояний, разделяющих две соседние точки круговой развертки.На основании логических значений сигналов с выхода второго блока 16 памяти, поступающих через селектор- мультиплексор 17, значений углов расстояний, с выхода блока 9 и управляющих сигналов с выхода блока 10, операционный блок 2 вычисляет значение угла ориентации селектированной детали.После окончания вычислений угла ориентации его значение с выхода операционного блока 2 с помощью коммутатора 3 команд по сигналу из блока 10 записывается в определенную ячейку блока 4 памяти. Затем блок 10 выдает в блок 5 команду на отработку полученной информации. 25 30 35 40 45 50 55 После разворота охвата робота на величину угла ориентации селектированной детали, схват его находится над центром тяжести этой детали с ориентацией, соответствующей ориентации детали. Поэтому по сигналу окончания отработки вычисленного значения угла ориентации селектированной детали выдается команда на захват детали.Таким образом, использование предлагаемого изобретения позволяет осуцтествлять последовательный захват нескольких деталей, одновременно находяцихся в зоне обзора адаптивного промышленного робота, что существенно расширяет функциональные возможности устройства, повышает степень адаптируемости робота к обстановке в рабочей зоне и упроцает вспомогательное оборудование, обслуживающее технологический процесс. Формула изобретения Устройство для управления адаптивным роботом по авт.св. Р 704775,о т л и ч а ю щ е е с я тем, что,с целью расширения Функциональныхвозможностей устройства, оно содержит сумматор и последовательно соединенные элемент И, сдвигающий регистр, второй блок памяти и селектор-мультиплексор, второй вход которого соединен с первым выходомкоммутатора раэверток, а выходс первым входом операционного блокаи четвертым входом блока управления, пятый вход которого соединен свыходом блока ввода изображения,седьмой выход - со вторым входом второго блока памяти, восьмой выход -с первым входом сумматора, девятыйвыход - со вторым входом сдвигающего регистра, а десятый выход - спервым входом элемента И, второйвход которого подключен к выходу блока ввода изображения, второй входкоторого соединен со вторым выходомкоммутатора разверток и вторым входом сумматора, выход которого подключен к третьему входу второго блока памяти, а второй выход блока формирования прямоугольного растра сое-динен с четвертым входом операционного блока.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРпо заявке Р 2528924/18-24,кл. О 05 В 19/00, В 25 4 9/00,197730 Эак ент", г. Ужгоро 1 роектная ПП Тир НИИПИ Го по дел 35,Москв
СмотретьЗаявка
2770140, 03.05.1979
РЫБИНСКИЙ АВИАЦИОННЫЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ, ЦЕНТРАЛЬНОЕ НАУЧНО-КОНСТРУКТОРСКОЕ БЮРО НАУЧНО ИССЛЕДОВАТЕЛЬСКОГО ХИМИКО-ТЕХНОЛОГИЧЕСКОГО ИНСТИТУТА
ГЛАДШТЕЙН МИХАИЛ АРКАДЬЕВИЧ, КОМАРОВ ВАЛЕРИЙ МИХАЙЛОВИЧ, МАЛЯГИН ВАЛЕРИЙ ВАСИЛЬЕВИЧ, САХАРОВ ОЛЕГ ТИМОФЕЕВИЧ, ГУРЕВИЧ СЕРГО МАТВЕЕВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: адаптивным, роботом
Опубликовано: 23.11.1981
Код ссылки
<a href="https://patents.su/5-883867-ustrojjstvo-dlya-upravleniya-adaptivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивным роботом</a>
Устройство для ввода информации

Номер патента: 1709326
Опубликовано: 30.01.1992
Авторы: Викторов, Полянин, Смирнов, Тикменов
МПК: G06F 13/00
Метки: ввода, информации
...триггера 17, тактовый вход которого соединен с выходом третьего триггера 13, вход установки которого соединен с выходом А=В компаратора 8, выход шестого разряда четвертого счетчика 2 соединен с входом установки второго триггера 7, вход сброса которого соединен с выходом четвертого триггера 17, вход сброса которого соединен с выходом элемента И-НЕ 16, первый вход которого соединен с входом 24 кадровых синхроимпульсов устройства. Информационный вход второго регистра 4 соединен с информационным входом 21 устройства. Тактовый вход третьего регистра 3 соединен с третьим выходом дешифратора 5, информационный вход которого соединен с управляющими входами 26 (команды) устройства. Выход, второго регистра 4 соединен с информационным входом...
Устройство для контроля блоков коррекции ошибок в памяти

Номер патента: 1029230
Опубликовано: 15.07.1983
МПК: G11C 29/00
Метки: блоков, коррекции, ошибок, памяти
.... Информационные сигналы поступают также на входы второго шифратора 4 шифратора считывания) аналогичного первому. Шифратор 4 формирует те .же контрольные разряды, что и шифратор 3. Выходные сигналы обоих шифраторов сравниваются друг с другом схемой сравнения 5. Сигнал на ее выходе 12 указывает на правильную работу обоих шифраторов (при наличии сравнения) или на неисправность одного иэ них при несравнении).В режиме считывания на первый вход 10 устройства поступают информационные, а на второй вход 13 контрольные разряды, считанные из накопителя.Блок управления 1 разрешает прохождение информационных сигналов через коммутатор 2 на входы первого шифратора 3, одновременно те же сигналы поступают на вход ана.логичного второго шифратора 4,...
Устройство для контроля блоков оперативной многоразрядной памяти

Номер патента: 1774380
Опубликовано: 07.11.1992
Авторы: Дудукин, Рудычев, Сычев, Шарапов
МПК: G11C 29/00
Метки: блоков, многоразрядной, оперативной, памяти
...14 задержки, вход которого соединен с выходом третьего элемента И 4. Выход элемента И - НЕ 30 соединен с входом установки в единицу генератора 7 псевдослучайной последовательности. Выходь 1 первого регистра 31 соединены с первой группой входов коммутатора 8 и группой входов пятого элемента И 6. Информационные входы генератора 7 псевдослучайной последовательности являются информационными входами.24 устройства, Выход блока 15 сравнения соединен с первым входом четвертого элемента И 5, выход которого является сигнальным выходом 20 устройства. Второй вход четвертого элемента И 5 соединен с инверсным выходам второго триггера 12. Входы установки в единицу и ноль второго триггера 12 являются соответственно третьим 18 и четвертым 19...
Устройство сопряжения для контроля блоков памяти

Номер патента: 1836723
Опубликовано: 23.08.1993
МПК: G11C 29/00
Метки: блоков, памяти, сопряжения
...срабатывают триггер 41, элемент 42, выход 2,1 блока 2.Если устройство не занято выполнением обращения к памяти, блок выбора режима 3 устанавливается в состоянии регенерации и выдает сигнал 3.1, что приводит к запуску сдвигателя 43, с выхода которого вырабатываются управляющие сигналы на выходах 2,2 - 2.5 в блок выбора режима 3, блок 5, мультиплексор адреса 6, счетчик 7,Блок 5 дешифратора выдает сигналы ВАЗ 5.6-5,9 на выходы 30. Мультиплексор 6 адреса передает адрес регенерации со счетчика 7 на выходы 29,В конце цикла регенерации счетчик 7 переключается по сигналу 2,5 и подготавливает следующий адрес регенерации. В режиме отмены регенерации со входа 22 наблок 1 генераторов поступает .низкий уро-.вень, который блокирует работу...
Блок вычисления логических функций
Номер патента: 1800465
Опубликовано: 07.03.1993
Авторы: Зарембовская, Мельников, Новиков, Фадеева
МПК: G06F 15/419
Метки: блок, вычисления, логических, функций
...путь, выходящий направо из графа или вниз.Можно любому графу сопоставить некоторую булевую функцию так, чтобы вершины графа были взвешены аргументами функции, а значение функции при зададанных аргументах определялось движением по графу из начальной вершины к тому или иному выходу графа и принимало значение единицы при выходе из графа направо (й), а значение нуля - при выходе вниз (О).Примеры графов микропрограмм для некоторых логических элементов, изображенных на фиг, 4, представлены на фиг.5. менной; В - признак инверсии весовой переменной; й, О - адреса перехода соответственно право и вниз.При В = 1 переменная Ъ инвертируется. Если значение Е с учетом значения В равно 1, то выбирается адрес Я и по нему производится обращение к...
Предыдущий патент: Устройство для импульсного управления исполнительными органами
Следующий патент: Цифровая система программного управления
Случайный патент: Вибрационное устройство для выпуска сыпучих материалов из емкости