Цифровая система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
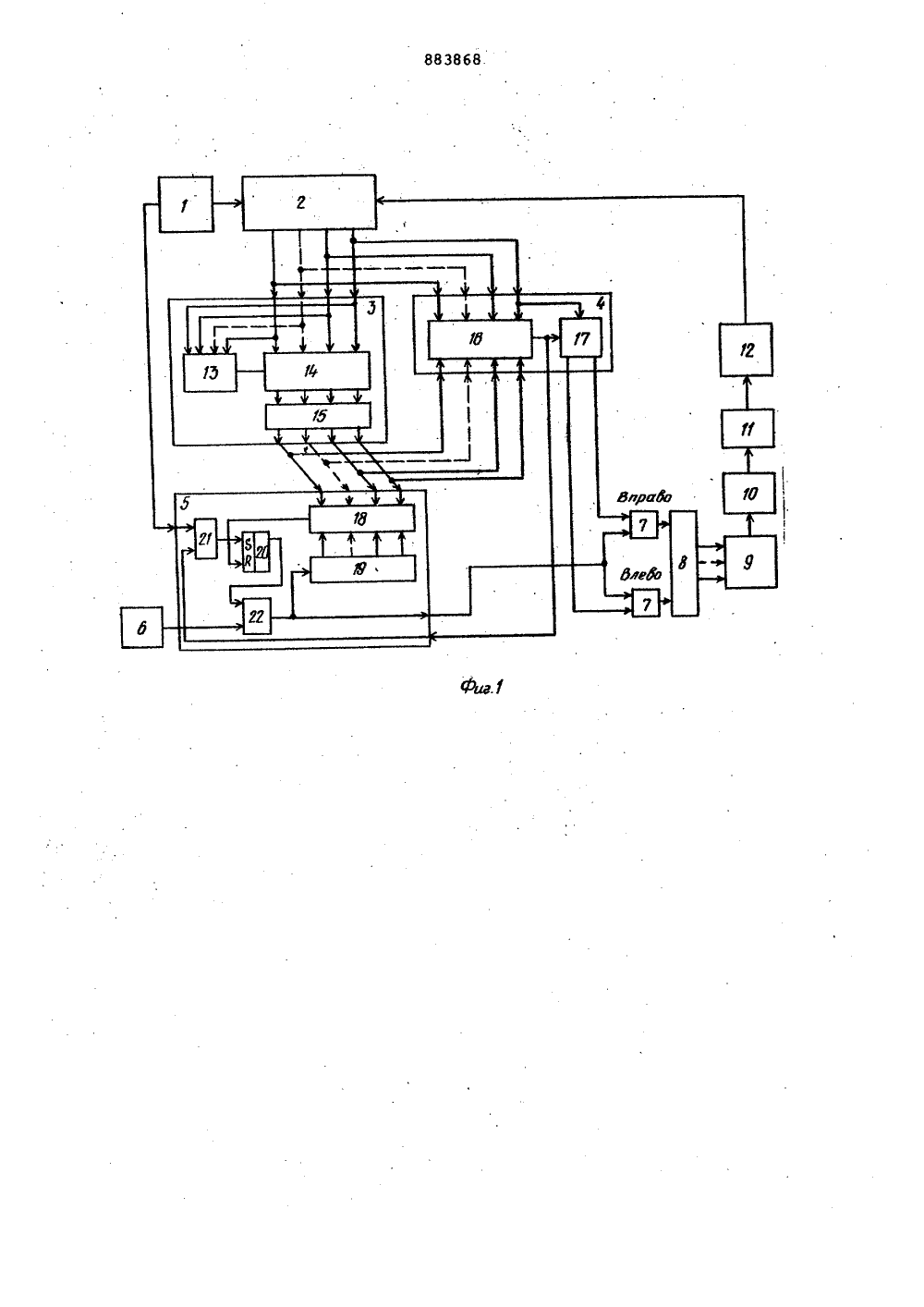
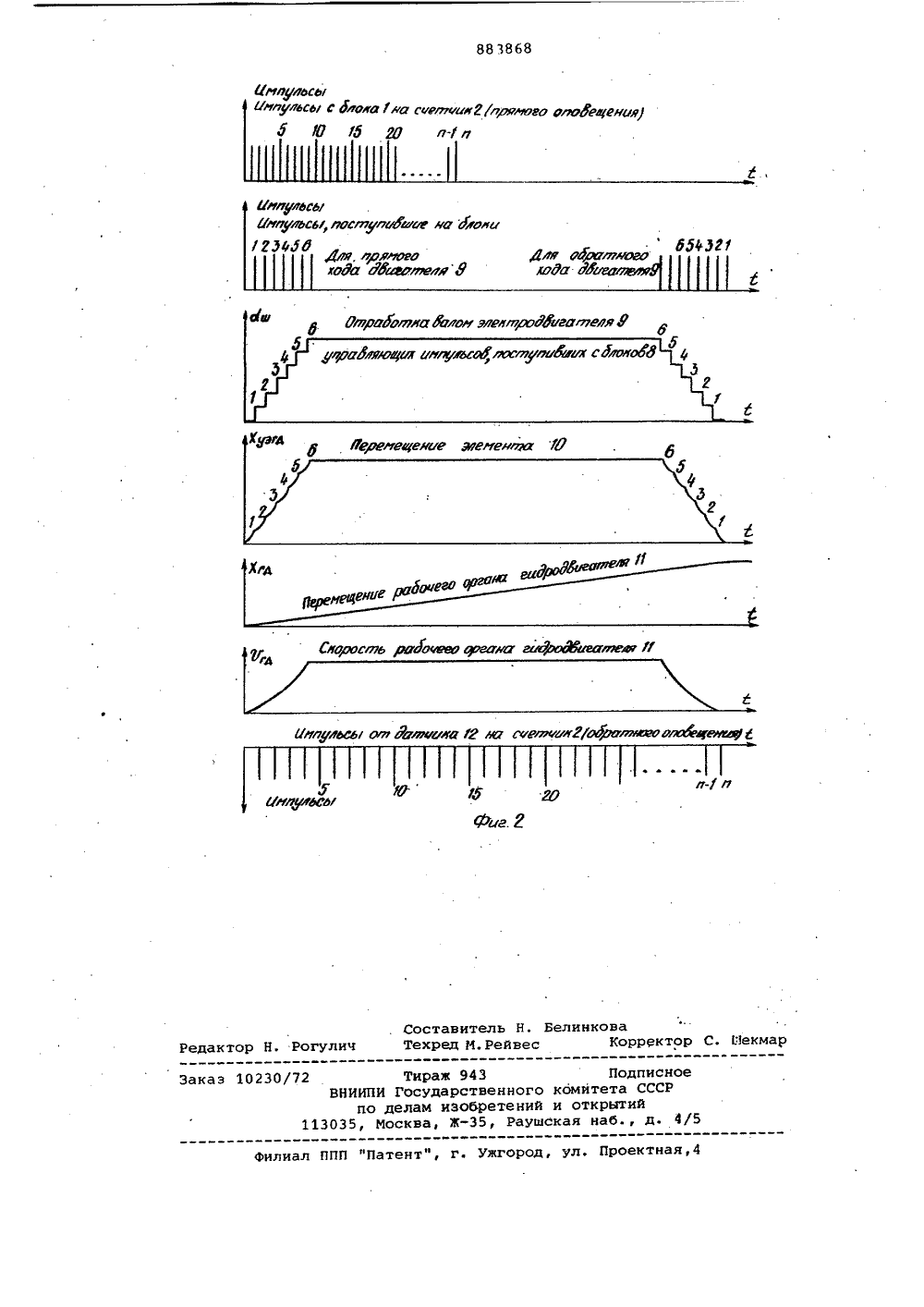
Союз Сфаетскнк Сецнаннстнческнк Ресвчбпнк(22) Заявлено 11. 06.79 (21) 2779091/18-24 Р 1 М с присоединением заявки йо О 05 В 19/18 Государствеииый комитет СССР ио делам изобретений и открытий(23) Приоритет Опубликовано 2311,81, Бюллетень ЙЯ 43 Дата опубликования описания 23, 11. 81(54) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ Изобретение относится к автоматике и вычислительной технике и, в частности к системам, применяемым дляуправления приводами металлообрабатывающих станков, в робототехнике, на мобильных машинах и на другой специальной технике.Известен электрогидравлический привод с цифровым управлением, сос" . тдящий из шагового электродвигателя и следящего гидропривода с мехайи-, ческой обратной связью 13Недостатком такого привода является наличие сложных механических обратных связей с люфтом, трудность получения требуемой величины дискретности и усилия на перестановку дросселирующего гидрораспределителя Скорость рабочего органа задается частотой управляющих импульсов,по" ступающих на шаговый электродвига. - тель, и определяется нагрузкой.Известен также электрогидравличский привОд с Цифровым Управлением, 25 состоящий из электрогидравлических усилителей сопло-заслонка, гидро- распределителя, датчика обратной связи 123 .Недостатком такой схемы является сложность из-за наличия блоков, З 0 позволяющих стыковать дискретную часть с аналоговой и наоборот. Для получения требуемой скорости рабочего органа введена ОСратная связьпо скорости.Известно также электрогидравлическое цифровое устройство регулирования высокой точности для цифрового управления станками, содержащее управляющую программу, с которой поступают управляющие импульсы на шаговый электродвигатель (ШЭД), что вызывает поворот вала ШЭД на фиксированный угол. ШЭД приводит в дей" ствие управляющий элемент гидромотора (гидрораспределитель),ГИдро- мотор через кинематические передачи - одноступенчатый редуктор и передачу винт-гайка - обеспечивает подачу на станке. ШЭД и управляющий элемент гидромотора служат н качестве цифро-аналоговых преобразователей, которые преобразуют подаваемые на них управляющие импульсы через гидромотор в движение подачи. При движении рабочего органа станка фактическое значение снимается с цифрового датчика обратной связи, который кинематически связан с рабочим органом станка и подключен ка 88386850 блоком 13, который, в свою очередь,формирует этот управляющий импульспри записи нового кода заданногоперемещения.В процессе обработки гидродвигателем заданного перемещения и списывания кода в счетчике 2 код на входепреобразователя 3 изменяется. Однаковследствие отсутствия управляющегоимпульса на управляющем входе формирователя 14 выходной код, записан - 40 ный в блоке 15 остается прежним втечение всего цикла отработки. Приэтом анализатор 4 сравнивает значение этого кода с текущим значениемкода в счетчике 2 и формирует сигналы управления элементами Ии ограниналом обратной связи к управляющей программе, Управляющая программа выполняет сравнение заданного и фактического значения положения рабочего органа и производит реверс ВЭД, что после достижения положения, заданного управляющими импульсами ИЭД, закрывает управляющий элемент гидромотора и, тем самым, останавливает гидромотор 3 .Однако известная схема не позволяет осуществить регулирование скорости рабочего органа в широком диапазоне рабочих скоростей, проводить синхронизацию движения двух и более рабочих органов, а также движение двух и более рабочих органов машин с требуемыми и различными наперед заданными скоростями. Уменьшение быстродействия устройства, которое определяется только быстродействием ЮЭД,ограничивается максимально допустимым числом импульсов, которое определяется рабочим ходом управляющего элемента гидромотора. В рассмотренной схеме поступлением определенного числа импульсов с упранляющей программы на ШЭД происходит движение рабочего органа с максимально возможной скоростью, так как рабочий ход управляющего элемента, в котором происходит регулирование скорости гидромотора, незначителен. Рабочий орган привода движется с максимальной скоростью и только при подходе к заданной точке происходит снижение скорости от максимальной до нулевой за счет реверса ИЭД.Все это ограничивает область применения устройства.Цель изобретения - значительное расширение области применения системыУкаэанная цель достигается тем, что в цифровую систему программного управления, содержащую генератор импульсов и последовательно соединенные блок управления, шагоный электродвигатель, управляюций элемент гидродвигателя, гидроднигатель,цифровой датчик обратной связи и реверсинный счетчик, второй вход которого подключен к информационному выходу блока задания программы, а входы блока управления соединены с выходами элементов И, введены последовательно соединенные Функциональный преобразователь, анализатор знака и ограничитель числа импульсов, выход которого подключен к первым входам элементов И, второй вход - к выходу генератора импульсов, третий вход - к управляющему выходу блока задания программы, а четвертые входы - к выходам функционального преоб раэователя, входы которого соединены с выходами реверсивного счетчика и со вторыми нходами анализатора знака, подключенного вторыми выходами ко вторым входам элементон И.На Фиг. 1 представлена схемасистемы; на Фиг. 2 - временная диаграмма работы отдельных блоков схемы.Система содержит блок 1 заданияпрограммы, реверсинный счетчик 2, 5 функциональный преобразователь 3,анализатор 4 знака, ограничитель 5числа импульсов, генератор 6 импульсов, элементы И 7, блок 8 управления, шаговый электродвигатель9, управляющий элемент 10 гидродвигателя, гидродвигатель 11, цифровойдатчик 12 обратной связи, причемпреобразователь 3 содержит блок 13команд, Формирователь 14 функциии блок 15 памяти, анализатор 4блок 16 сравнения кодов и блок 17знака, а ограничитель 5 - блок 18сравнения кодов, счетчик 19 импульсов, В 5-триггер 20, элемент ИЛИ 21и элемент И 22.20 Система работает следующим образом.С блока 1 на счетчик 2 поступаютуправляющие импульсы с максимальнойчастотой, число которых определяет 25 положение рабочего органа гидродвигателя 11. С выхода счетчика 2 кодположения поступает на преобразователь 3 и анализатор 4. Преобразователь 3 Формирует код управления ограничителем числа импульсов в соответствии с кодом положения и выбранным законом управления следующимобразом.Формирователь 14 после того, какв счетчик 2 записан код заданногоперемещения, производит один циклформирования, функции, в результатекоторого н блок 15 записывается кодвеличины открытия управляющего элемента гидродвигателя. Следуюций 40 цикл Формирования производится послеобработки предыдущего задания ипоступления нового кода в счетчик 2,Таким образом преобразователь 3формирует код отклонения управляющегоэлемента гидроднигателя один раз длякаждого нового значения заданногоперемещения, причем запуск формирователя 14 осуществляется по управляющему входу импульсом, формируемымФормула изобретенияЦифровая система программного управления, содержащая генератор импульсов и пОследовательно соединенныеблок управления, шаговый электродвигатель, управляющий элемент гидродвигателя, гидродвигатель, цифровойдатчик обратной связи и реверсивныйсчетчик, второй вход которого подключен к информационному выходу блоказадания программы, а входы блока управления соединены с выходами элементов И, отличающаяся тем,что, с целью расширения области применения системы, в нее введены последовательно соединенные функциональный преобразователь, анализатор знакаи ограничитель числа импульсов, выходкоторого подключен к первым входам .элементов И, второй вход - к выходугенератора импульсов, третий вход - куправляющему выходу блока заданияпрограммы, а четвертые входы - к выходам функционального преобразователя, входы которого соединены с выходами реверсивного счетчика и со вторымивходами анализатора знака, подключенного вторыми выходами ко вторымвходам элементов И.Источники информации,принятые во внимание при экспертизе1. Михеев Ю.Е. и Сосонкин В.Л.Системы автоматического угравлениястанками. М., "Машиностроение", 1978,с. 64, рис. 47.2. Там же, с. 106, рис. 115.3. Патент ФРГ Р 1294716,кл. 42 г 19/18, опублик. 1969 (про"тотип). чителем 5 при их равенстве, а числоимпульсов, проходящих через ограничитель 5, соответствует данномукоду управления и определяет величину перемещения элемента 10.При наличии разрешающего сигналана первом или втором управляющем входе ограничителя 5, этот сигнал проходит через элемент ИЛИ 21 на 5-входВ 5-триггера 20, на прямом выходекоторого устанавливаются единичныйсигнал, поступающий на первый входэлемента И 22. На второй вход элемента И 22 поступают импульсы с генератора б через вход ограничителя 5.По существу элемент И 22 выполняетфункцию управляемого ключа, т.е. 15пропускает на выход импульсы с генератора б при наличии соответствующего сигнала на первом входе. С выходаэлемента И 22 импульсы поступают навход ограничителя 5 и на счетный 20вход счетчика 12, который подсчитывает их,В результате на разрядных выходахсчетчика 19 получаем число прошедшихна выходе импульсов, например:в дво дичном коде, который сравнивается скодом, поступающим с формирователякода в блок 18. При их равенствена выходе этого блока 18 формируется сигнал, возвращающий й 5-триггер20 в исходное состояние, На прямомвыходе триггера 20 устанавливаетсянулевой сигнал, запрещающий прохождение импульсов на выход ограничителя 5,Таким Образом на блок 8 поступаетчисло импульсов, определяемое кодом, сформированным преобразователем3. Это число определяет угол поворота вала электродвигателя 9 иследовательно, величину открытия управляющего элемента 10 гидродвигателя 11.Движение рабоЧего органа гидродвигателя 11 через кинематическую связьприводит к движению датчика 12, скоторого на счетчик 2 поступают импульсы обратной связи, которыесписывают код, поступивший с управляющей программы на счетчик 2,Рабочее движение органа гидродвигателя 11 происходит с постоянной .скоростью, так как управляющий элемент 10 гидродвигателя 11 смеценна строго постоянную величину, и дотех пор пока число импульсов пристирании на счетчике 2 не сравняется с числом импульсов заданных преобразователем 3 на бграничитель 5. Прйсовпадении числа импульсов анализатОр 4 (с помощью блока 16) подаеткоманду на запускающий вход ограничителя 5 и на соответствующий элементИ 7, что вызывает прохождение управляющих импульсов с генератораб через ограничитель 5 на блок 8 иреверс электродвигателя 9, Последний вызовет одновременно и возврат элемента 10 гидродвигателя 11 в исходное положение таким образом, что к моменту окончания перемещения рабочего органа в заданное положение вал электродвигателя 9, следовательно, и элемент 10 возвращается в исходное положение. При необходимости конструктивных ограничений величин рабочих перемещений, выходящих за пределы рабочих ходов управляющих элементов 10 гидродвигателя,подача управляющих импульсов на электродвигатель 9 выше максимального количества невозможна из-за наличия ограничителя 5, настроенного по верхнему пределу на это максимально допустимое количество.Использование в схеме новых блоков позволяет производить от управляющей программы управление положением рабочего органа с соответствующей скоростью, В результате расширен диапазон рабочих скоростей и повышена точность позиционирования, которая определяется только датчиком обратной связи, что позволит увеличить сферу применения системы в различных областях техники.8838 б 8 и оъ го вюдещения Ячююа 6 МЮЙ 1 КЮФИф Юлумгь Составитель Н. Белинкова Техред М.Рейвес Корре С. Иекм ор Н. Рогул каз 10230 4 ППП "Патент", г. Ужгород, ул, Проектная,4 и Тираж 943 ВНИИПИ Государственного по делам изобретений 3035, Москва, Ж, Рауш
СмотретьЗаявка
2779091, 11.06.1979
ИВАНОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. ЛЕНИНА
СЕРЕБРЕННЫЙ ВАЛЕРИЙ ГЕРМАНОВИЧ, БУХОВ ОЛЕГ ВАСИЛЬЕВИЧ, ЦУРГАНОВ СТАНИСЛАВ ВАСИЛЬЕВИЧ, ПОДГОРКОВ ВЛАДИМИР ВИКТОРОВИЧ, БОБКО АЛЬБИН МИХАЙЛОВИЧ, ДУНАЕВ СЕРГЕЙ ВИКТОРОВИЧ, НИКОЛАЕВ ВАЛЕРИЙ ФЕДОРОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного, цифровая
Опубликовано: 23.11.1981
Код ссылки
<a href="https://patents.su/5-883868-cifrovaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Цифровая система программного управления</a>
Устройство поиска неисправных блоков и элементов

Номер патента: 1709351
Опубликовано: 30.01.1992
Авторы: Буинов, Ламбаева, Мухопад, Скибинский
МПК: G06F 11/14
Метки: блоков, неисправных, поиска, элементов
...и выход блока управления со входами первого блока элементов ИЛИ, а также соединения выхода первого блока элементов ИЛИ с входом регистра оценки и выхода регистраоценки с входами второгоблока элементов И и блока оценки кода исправности, соединения выхода регистра результата с входом блока контроля результата и выхода блока контроля с входами первого блока элементов И и блока управления, а также выхода блока управления с входом блока контроля результата, выхода второго счетчика с входом блока контроля результата. Все новые связи вместе с вновь введенными блоками обеспечивают расширение области применения устройства путем одновременного контроля разнородных типовых блоков вичислительной техники.На фиг.1 представлена структурная схема...
Устройство для перевода звеньев складывающей стрелы из транспортного положения в рабочее и обратно

Номер патента: 649643
Опубликовано: 28.02.1979
Авторы: Алексеев, Верстов, Либин, Ожерельев, Ханович, Цыганков
МПК: B66C 23/36
Метки: звеньев, обратно, перевода, положения, рабочее, складывающей, стрелы, транспортного
...положении; на фиг. 2ющаяся стрела; на фиг. 3 - разна фиг. 2; на фиг. 4 - разрезфиг. 3.3Устройство для перевода складывающейся стрелы из транспортного положения в рабочее и обратно используется преимущественно на самоходном монтажном агрегате, состоящем из базового автомобиля 1, на котором установлены платформа 2 с оборудованием для освоения и ремонта скважин, складывающаяся грузоподъемная стрела, состоящая из вертикального 3 и наклонного 4 звеньев, грузовая лебедка 5 и винтовой домкрат 6 для подъема вертикального звена стрелы в рабочее положение.Крюк 7 грузового каната 8 лебедки 5 снабжен коническим упором 9, а кожух 10 головного блока 11 стрелы - соответствующим упору гнездом 12.В месте сопряжения вертикального 3 и наклонного 4...
Устройство для контроля системы телемеханики с решающей обратной связью

Номер патента: 1029208
Опубликовано: 15.07.1983
Авторы: Петренко, Сахно, Фролов
МПК: G08C 25/02
Метки: обратной, решающей, связью, системы, телемеханики
...входыэлементов И 34 и 35, на выход 53-иблока 3 и через элемент ИЛИ 41 навыход 54 блока 3.В случае, когда встроенный контроль закончился, т,е, система телемеханики работает в режиме функционирования, на входе 44 блока 1(фиг.2) присутствует сигнал отрицательной полярности, поступающейна вход элемента И 18. Тогда и на 4 Овыходе элемента И 18 присутствуетсигнал отрицательной полярности,поступающий на входы установки вноль счетчиков 28 и 29 и запрещающийих функционирование. 45В случае, если предлагаемое устройство работает в режиме контроля,через вход 44 блока 1 на вход элемента И 18 поступает сигнал положительной полярности, снимаемый с выхода элемента ИЛИ 41 блока 3.На входе 43 блока 1 всегда присутствует сигнал отрицательной...
Устройство для контроля системы телемеханики с решающей обратной связью

Номер патента: 680023
Опубликовано: 15.08.1979
Авторы: Кочешков, Сергеев, Чуриков
МПК: G08C 25/02
Метки: обратной, решающей, связью, системы, телемеханики
...первым входом второго блока 35управления, выход счетчика блокировки соединен со вторыми входами элементов И блоков индикации отказов,выходы элементов И соединены совходами соответствующих сигнализаторов.На чертеже представлена блок-схема предлагаемого устройства, гдена передающей стороне: первый линейный блок 1, блок переключения 2,накопитель-повторитель З,.кодопреобразоаатель 4, второй линейныйблок 5 на приемной стороне первыйлинейный блок 6, декодер 7, второйлинейный блок 8, блок обнаруженияошибок 9, счетчик блокировки 101 50узел анализа и сигнализации 11, выполненный на элементах И 12-15, первом сумматоре 16 по модулю дна, первом кодопреобразователе 17, втором(на передающей стороне), втором блоке 26 локализации отказов (на приемной...
Устройство для отображения дугокружностей и эллипсов ha экранеэлектронно-лучевой трубки

Номер патента: 807264
Опубликовано: 23.02.1981
Автор: Лыков
МПК: G06F 3/153
Метки: дугокружностей, отображения, трубки, экранеэлектронно-лучевой, эллипсов
...которого подсоединены шины 42кода центра координаты. Х. Шина 43 является выходом аналогового значениякоораинаты Х.45 Устройство работает следующим образом.В счетчике 5 текущего угла по шине8 коца начала цуги записывается код начала ауги, а в регистр 11 кода конца ю цуги по шине 12 коаа конца цуги записывается коц конца дуги. Два старшихразряда 6 счетчика 5 текущего угла определяют номер четверти окружности. Остальные младшие разряды 7 счетчика 5 и текущего угла определяют текущее зна-чение конца цуги в преаелах любой однойчетверти окружности, причем аля дальнейшей обработки на цифроаналоговый пре807264 второму вкоау умножителя 20. Напряже 10 ние на выхоце умножителя 20 эквиваяк+1, 5, Г 7юю= Е(-1) (2 К+1) 3Яу + --- ,+" (1)...
Предыдущий патент: Устройство для управления адаптивным роботом
Следующий патент: Устройство для программного управления
Случайный патент: Акустическая фурма