Система программного управления многокоординатным манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 497085
Авторы: Крейцер, Непомнящий, Фаерман, Чердынцев



Текст
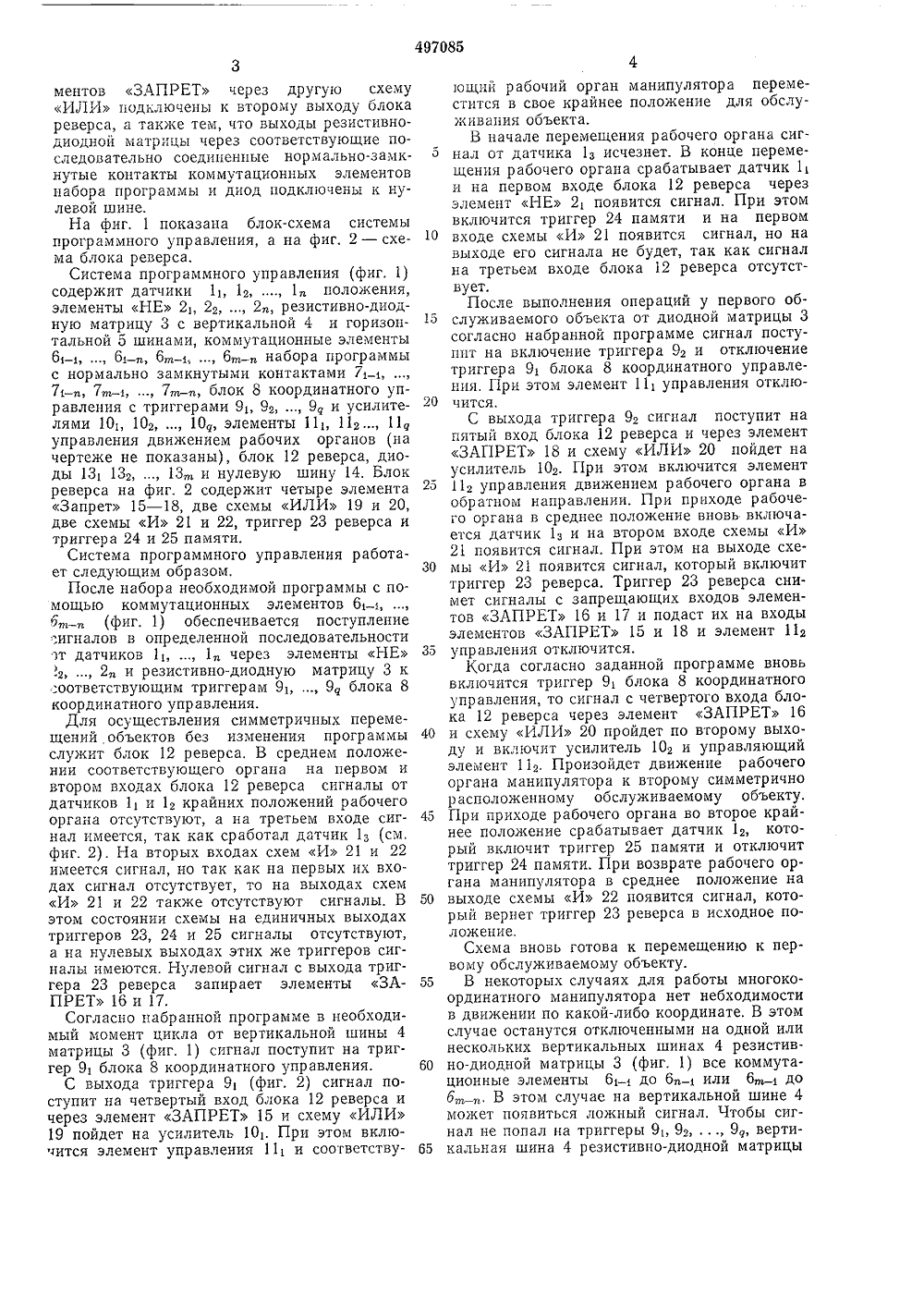
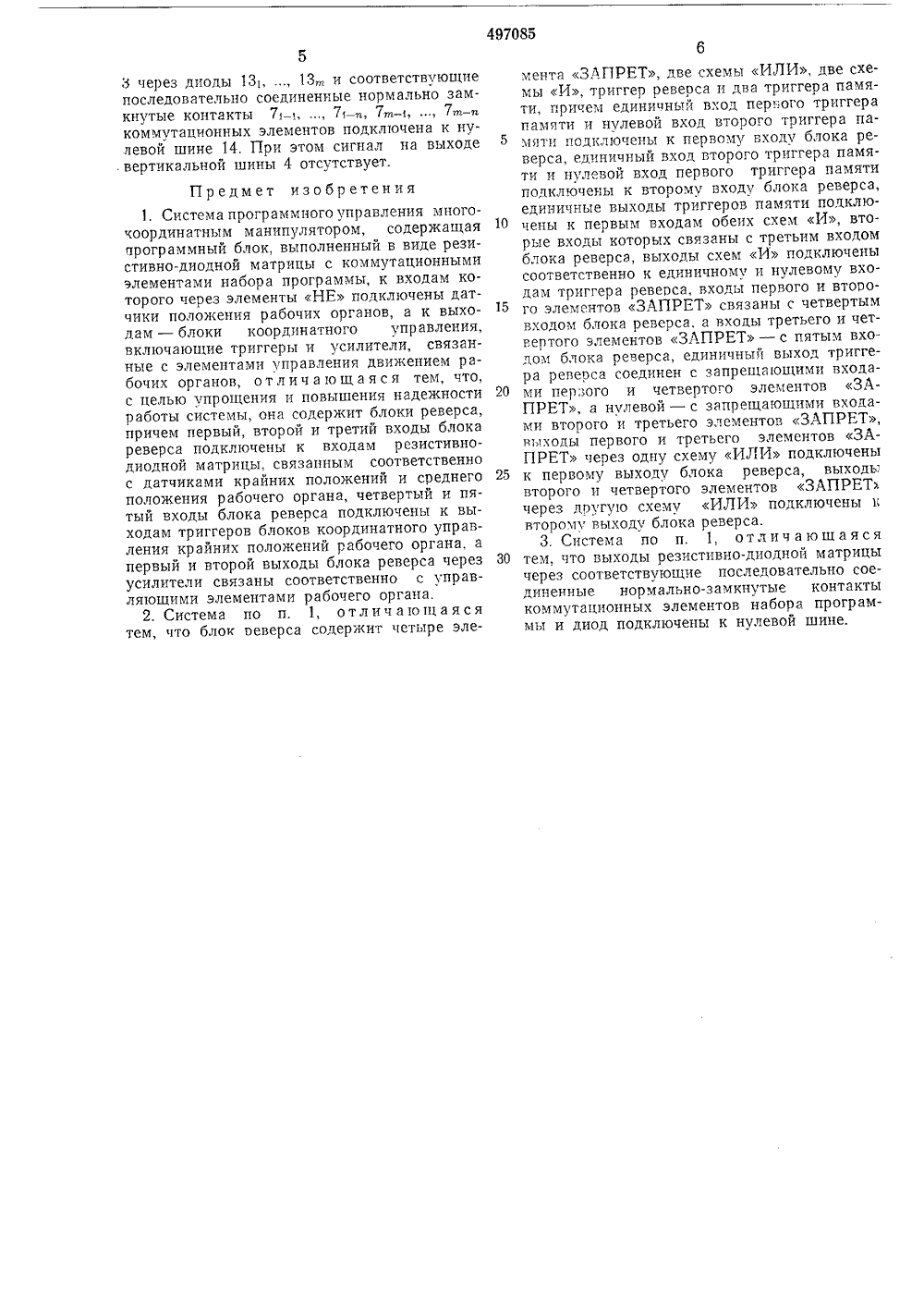
О П И С А Н И Е 110 497088ИЗОБРЕТЕН ИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз ЙоветскиК Социалистических Ресоубликсударственныи комит авета Министров СССРоо делам изобретений 3) УДК 621-503,5) Заявител чно-исследовательский институт иальных способов литья 4) СИСТЕМА ПРОГРАМ МНОГОКООРДИНАТНЬ НОГО УПРАВЛЕ МАНИПУЛЯТОР Изобретение относится к области авгоматики и вычислительной техники и может найти применение при построении систем программного управления многокоординатными манипуляторами, литейными машинами и металлообрабатывающими станками.Известны системы программного управления многокоординатными манипуляторами, содержащие программный блок, выполненный в виде резистивно-диодной матрицы с коммутационными элементами набора программы, к входам которого через элементы НЕ подключены датчики положения рабочих органов, а к выходам - блоки координатного управления, включающие триггеры и усилители, связанные с элементами управления движения рабочих органов.Недостатком этих систем является их сложность и низкая надежность работы.Целью изобретения является упрощение системы и повышение надежности ее работы.Это достигается тем, что система содержит блоки реверса, причем первый, второй и третий входы блока реверса подключены к входам резистивно-диодной матрицы, связанным соответственно с датчиками крайних положений и среднего положения рабочего органа, четвертый и пятый входы блока реверса подключены к выходам триггеров блоков координатного управления крайних положений рабойцер, Д. С. Фаерман и В. Н, Чердынцев чего органа, а первый и второй выходы блока реверса через усилители связаны соответственно с управляющими элементами рабочего органа, а также тем, что блок реверса содер жит четыре элемента ЗАПРЕТ, две схемыИЛИ, две схемы И, триггер реверса и два триггера памяти, причем единичный вход пер вого триггера памяти и нулевой вход второго триггера памяти подключены к первому входу 10 блока реверса, единичный вход второго триггера памяти и нулевой вход первого триггера памяти подключены к второму входу блока реверса, единичные выходы триггеров памяти подключены к первым входам обеих схем 15 И, вторые входы которых связаны с третьим входом блока реверса, выходы схем И подключены соответственно к единичному и нулевому входам триггера реверса, входы первого и второго элементов ЗАПРЕТ свя заны с четвертым входом блока реверса, авходы третьего и четвертого элементов ЗАПРЕТ - с пятым входом блока реверса, единичный выход триггера реверса соединен с запрещающими входами первого и четвертого 25 элементов ЗАПРЕТ, а нулевой - с запрещающими входами второго и третьего элементов ЗАПРЕТ, выходы первого и третьего элементов ЗАПРЕТ через одну схему ИЛИ подключены к первому выходу блока 30 реверса, выхолы второго и четвертого эле 497085ментов ЗАПРЕТ через другую схему ющий рабочий орган манипулятора переме- ИЛИ подключены к второму выходу блока стится в свое крайнее положение для обслуреверса, а также тем, что выходы резистивно- живапия объекта.диодной матрицы через соответствующие по- В начале перемещения рабочего органа сигследовательно соединенные нормально-замк-еал От датчика 1 З исчезнет. В конце переменутые контакты коммутационных элементов щения рабочего органа срабатывает датчик 11 набора программы и диод подключены к ну- и на первом входе блока 12 реверса через левой шине. элемент НЕ 2, появится сигнал, При этомНа фиг. 1 показана блок-схема системы включится триггер 24 памяти и на первом программного управления, а на фиг, 2 - схе входе схемы И 21 появится сигнал, но на ма блока реверса. выходе его сигнала не будет, так как сигналСистема программного управления (фиг. 1) на третьем входе блока 12 реверса отсутстсодержит датчики 1 1 , 1 положения, вует.элементы НЕ 2 п 2, , 2, резистивно-диод- После выполнения операций у первого обную матрицу 3 с вертикальной 4 и горизон служиваемого объекта от диодной матрицы 3 тальной 5 шинами, коммутационные элементы согласно набранной программе сигнал посту - ь "61 - д, бт - ь , 6 ж - и набора программы ппт на Включее 1 ие триггера 92 и Отключение с нормально замкнутыми контактами 7 е ,триггера 91 блока 8 координатного управле , 7 - , , 7 , блок 8 координатного уп- ния. При этом элемент 111 управления отклюравления с триггерами 9 е, 92 9 и усилите чится.лями 10 ь 102, , 10 элементы 11 ь 112, 11, С выхода триггера 92 сигнал поступит на управления движением рабочих органов (на пятый вход блока 12 реверса и через элемент чертеже не показаны), блок 12 реверса, дио- ЗАПРЕТ 18 и схему ИЛИ 20 пойдет на ды 131 13 г 13 и нулевую шину 14. Блок усилитель 102. При этом включится элемент реверса на фиг. 2 содержит четыре элемента 2 д 11 г управления движением рабочего органа в Запрет 15 - 18, две схемы ИЛИ 19 и 20, обратном направлении. При приходе рабочедве схемы И 21 и 22, триггер 23 реверса и го органа в среднее положение вновь включатриггера 24 и 25 памяти. ется датчик 1 и на втором входе схемы ИСистема программного управления работа появится сигнал. При этом на выходе схеет следующим образом. 30 мы И 21 появится сигнал, который включитПосле набора необходимой программы с по- триггер 23 реверса. Триггер 23 реверса снимощью коммутационных элементов 6 е 1, , мет сигналы с запрещающих входов элемент -(фиг. 1) обеспечивается поступление тов ЗАПРЕТ 16 и 17 и подаст их на входы сигналов в определенной последовательности элементов ЗАПРЕТ 15 и 18 и элемент 112 зт датчиков 1 , 1 через элементы НЕ 35 управления отключится,2, , 2 и резистивно-диодную матрицу 3 к Когда согласно заданной программе вновь :оответствУющим тРиггеРам 9 П , 9 блока 8 вклочитсЯ тРиггеР 9, блока 8 кооРдинатного координатного управления. управления, то сигнал с четвертого входа блоДля осуществления симметричных переме- ка 12 реверса через элемент ЗАПРЕТ 16 щений объектов без изменения программы 40 и схему ИЛИ 20 пройдет по второму выхослужит блок 12 реверса, В среднем положе- ду и включит усилитель 102 и управляющий нии соответствующего органа на первом и элемент 112. Произойдет движение рабочего втором входах блока 12 реверса сигналы от органа манипулятора к второму симметрично датчиков 11 и 12 крайних положений рабочего расположенному обслуживаемому объекту. органа отсутствуют, а на третьем входе сиг При приходе рабочего органа во второе крайнал имеется, так как сработал датчик 1, (см. нее положение срабатывает датчик 1 котофиг. 2), На вторых входах схем И 21 и 22 рый включит триггер 25 памяти и отключит имеется сигнал, но так как на первых их вхо- триггер 24 памяти. При возврате рабочего ор. дах сигнал отсутствует, то на выходах схем гана манипулятора в среднее положение на И 21 и 22 также отсутствуют сигналы, В 50 выходе схемы И 22 появится сигнал, кото- этом состоянии схемы на единичных выходах рый вернет триггер 23 реверса в исходное по- триггеров 23, 24 и 25 сигналы отсутствуют, ложение.а на нулевых выходах этих же триггеров сиг- Схема вновь готова к перемещению к перналы имеются. Нулевой сигнал с выхода триг- Вому обслуживаемому объекту.гера 23 реверса запирает элементы ЗА В некоторых случаях для работы многоко- ПРЕТ 16 и 17. ординатного манипулятора нет небходимостиСогласно набранной программе в необходи- в движении по какой-либо координате. В этом мый момент цикла от вертикальной шины 4 случае останутся отключенными на одной или матрицы 3 (фиг. 1) сигнал поступит на триг- нескольких вертикальных шинах 4 резистивгер 9, блока 8 координатного управления. 60 но-диодной матрицы3 (фиг. 1) все коммутаС выхода триггера 9, (фиг. 2) сигнал по- ционные элементы 6 е е до бп е или 6 П до ступит на четвертый вход блока 12 реверса и б, В этом случае на вертикальной шине 4 через элемент ЗАПРЕТ 15 и схему ИЛИ моекет появиться ложный сигнал, Чтобы сиг пойдет на усилитель 10 ь При этом вклю- нал не попал на триггеры 9 ь 9 9 д, вертичится элемент управления 11, и соответству кальная шина 4 резистивно-диодной матрицы3 через диоды 13 , 3 и соответствующие последовательно соединенные нормально замкнутые контакты 71 - ь, 7 - л, 7 т - 1, , 7 т - и коммутационных элементов подключена к нулевой шине 14. При этом сигнал на выходе вертикальной шины 4 отсутствует.Предмет изобретения1, Система программного управления много- координатным манипулятором, содержащая программный блок, выполненный в виде резистивно-диодной матрицы с коммутационными элементами набора программы, к входам которого через элементы НЕ подключены датчики положения рабочих органов, а к выходам - блоки координатного управления, включающие триггеры и усилители, связанные с элементами управления движением рабочих органов, отличающаяся тем, что, с целью упрощения и повышения надежности работы системы, она содержит блоки реверса, причем первый, второй и третий входы блока реверса подключены к входам резистивнодиодной матрицы, связанным соответственно с датчиками крайних положений и среднего положения рабочего органа, четвертый и пятый входы блока реверса подключены к выходам триггеров блоков координатного управления крайних положений рабочего органа, а первый и второй выходы блока реверса через усилители связаны соответственно с управляющими элементами рабочего органа,2. Система по п. 1, отличающаяся тем, что блок певерса содержит четыре элемента ЗАПРЕТ, две схемы ИЛИ, две схемы И, триггер ревеоса и два триггера памяти, причем единичныи вход первого триггера памяти и нулевой вход второго триггера памяти подключены к первому входу блока реверса, единичный вход второго триггера памяти и нулевой вход первого триггера памяти подключены к второму входу блока реверса, единичные выходы триггеров памяти подклю чены к первым входам обеих схем И, вторые входы которых связаны с третьим входом блока реверса, выходы схем И подключены соответственно к единичному и нулевому входам триггера реверса, входы первого и второ го элементов ЗАПРЕТ связаны с четвертымвходом блока реверса, а входы третьего и четвертого элементов ЗАПРЕТ - с пятым входом блока реверса, единичный выход триггера ревеоса соединен с запрещающими входа ми перзого и четвертого элементов ЗАПРЕТ, а нулевой - с запрещающими входами второго и третьего элементов ЗАПРЕТ, вьходы первого и третьего элементов ЗАПРЕТ через одну схему ИЛИ подключены 25 к первому выходу блока реверса, выходь;второго и четвертого элементов ЗАПРЕТ через доугую схему ИЛИ подключены к второму выходу блока реверса.3 Система по п. 1, отличающаяся 30 тем, что выходы резистивно-диодной матрицычерез соответствующие последовательно соединенные нормально-замкнутые контакты коммутационных элементов набора программы и диод подключены к нулевой шине.ПодписноеСР Сапунов Типографи Заказ 1848/9 Изд,1156 ЦНИИПИ Государственного комитет по делам изобретений 113035, Москва, Ж, РауТираж 864а Совета Министрои открытийшская наб., д, 4/5
СмотретьЗаявка
1920571, 14.05.1973
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ СПЕЦИАЛЬНЫХ СПОСОБОВ ЛИТЬЯ
НЕПОМНЯЩИЙ ВАЛЕНТИН ФЕДОРОВИЧ, КРЕЙЦЕР АЛЕКСАНДР АБРАМОВИЧ, ФАЕРМАН ДАВИД САМУИЛОВИЧ, ЧЕРДЫНЦЕВ ВЛАДИМИР НИКОЛАЕВИЧ
МПК / Метки
МПК: B21J 13/10
Метки: манипулятором, многокоординатным, программного
Опубликовано: 30.12.1975
Код ссылки
<a href="https://patents.su/5-497085-sistema-programmnogo-upravleniya-mnogokoordinatnym-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления многокоординатным манипулятором</a>
Элемент памяти

Номер патента: 1642521
Опубликовано: 15.04.1991
Авторы: Заяц, Коханчук, Яковлев
МПК: G11C 11/00
...+Вт (фиг. 2 а). Конденсатор 18 поддерживает ток, протекающий по обмотке записи, После отключения питания сердечник сохраняет на магниченность +Вг.Если же в триггере 9 к мг "агенту отключения питания был записан логический "0", то уровень "1" с инверсного выхода триггера 9 поступает на второй вход элемента 12 И - НЕ (на первом входе импульс с выхода элемента 5 И). Элемент И - НЕ 12 срабатывает и формирует отрицательный импульс, который поступает на базу транзистора 14, открывая его. Через открытый транзистор 14 и обмотку считывания трансформатора 10 течет импульс тока, который перемагничивает сердечник в состояние -Вг если сердечник находился в состоянии -Вг, то это состояние подтвердится),После включения питания выполняется...
Элемент памяти

Номер патента: 834767
Опубликовано: 30.05.1981
Авторы: Милошевский, Яковлев
МПК: G11C 11/40
...- напряжение перекрытия кана%ла транзистора х (1=2, 3,. 4, 5) .Пусть крутизна транзисторов 2 и 3 выше, чем крутизна транзисторов 4 и 5( и 1 оЬ 1 М 4 э ЭП работает следующим образом.Если 067 удовлетворяет условию (1) (режим хранения информации), то ЭП может находиться в любом из следующих двух устойчивых состояний, В первом состоянии (пусть оно соответствует, например, 0 двоичной информации) транзисторы 2 и 3 закрыты, а 4 и 5 открыты, вследствие чего У близко к О. Во втором состоянии, соответствующем 1 двоичной информации, транзисторы 2 и 3 открыты, а 4 и 5 закрыты и Ц близко к Ц 6. В обоих состояниях мощность, рассеиваемая ЭП, мала и обусловлена лишь токами утечки.Если ц- увеличить настолько, чтобы оно несколько превысило Уи (режим...
Элемент памяти

Номер патента: 991508
Опубликовано: 23.01.1983
Авторы: Баринов, Кимарский, Ковалдин, Кузовлев, Черняк
МПК: G11C 11/40
...сегментов созданы коллекторные области Пф-типа проводимОсти 14 и 15 а Скрытый слОЙ Являсфф" 3 р ется общим для двух сегментов и соединенадресной шиной 18. База одного . сегмента соединена с коллекторной областью другого и наоборот. Инжекторы соединены с разрядными шинами 17 и 18. 5 На коллекторных областях каждого сегмента сформированы высоколегированные поликремниевые области р -типа проводимости 19 и 20, причем поликремниевая область одного сегмента соединенас инжектором противоположного и наоборот. Области 19, 14, 12 и 20, 15, 13 образуют "паразитныеф р -М -р тран-ф эисторы .21 и 22 соответственно.Элемент памяти работает следующим образом. 45В режиме считывания информации равные токи считывания 10 вытекают иэ разрядных шин 17 и 18 в...
Элемент памяти

Номер патента: 1672528
Опубликовано: 23.08.1991
Автор: Варламов
МПК: G11C 19/14
...включенном питании происходит запись информации в трансформатор 8 на ферритовую пластину. В этом режиме, если в триггер записан "0", эмиттерный ток открытого транзистора 3 замыкается на землю через шину 7. Этот ток, протекая по проводнику, который соединяет первый эмиттер открытого транзистора 3 с шиной 7, создает вокруг этого проводника электрическое поле, напряженность которого должна быть равна или превышать напряженность поля насыщения ферритовой пластинки трансформатора 8 и намагничивать ее до насыщенного состояния. Если в триггере информация после записи изменится, то откроется транзистор 4 и за счет того, что проводники, соединяющие первые эмиттеры и шину 7, подключены встречно, ток транзистора 4, протекая через вторичную...
Элемент памяти

Номер патента: 1791849
Опубликовано: 30.01.1993
Автор: Варламов
МПК: G11C 11/40
...памятиЭВМ,Целью изобретения является увеличение информационной емкости элемента памяти,На чертеже представлена электрическая схема элемента памяти,Элемент памяти содержит два ключевых транзистора 1, 2, два транзистора связи3, 4, два нагрузочных резистора 5, 6, разделительные элементы на диодах 7, адреснуюшину 8, две разрядные шины 9, 10, шинысчитывания 11, шину питания 12, шину нулевого потенциала 13,Устройство работает следующим образом.П ри записи информации работа тратера ничем.не отличается от. работы обычного 20статического триггера, Операция считывания любой информации также ничем не отличается от операции считывания статическоготриггера,Диоды 7 могут быть либо подсоединены 25к шинам 11, либо не подсоединены, в зависимости...
Предыдущий патент: Кузнечный боек
Следующий патент: Инструмент для односторонней клепки
Случайный патент: Устройство для отображения информации