Система определения взаимного положения судов при грузопередаче траверзным способом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 428978
Авторы: Василевский, Версией, Завирухо, Назаров
Текст
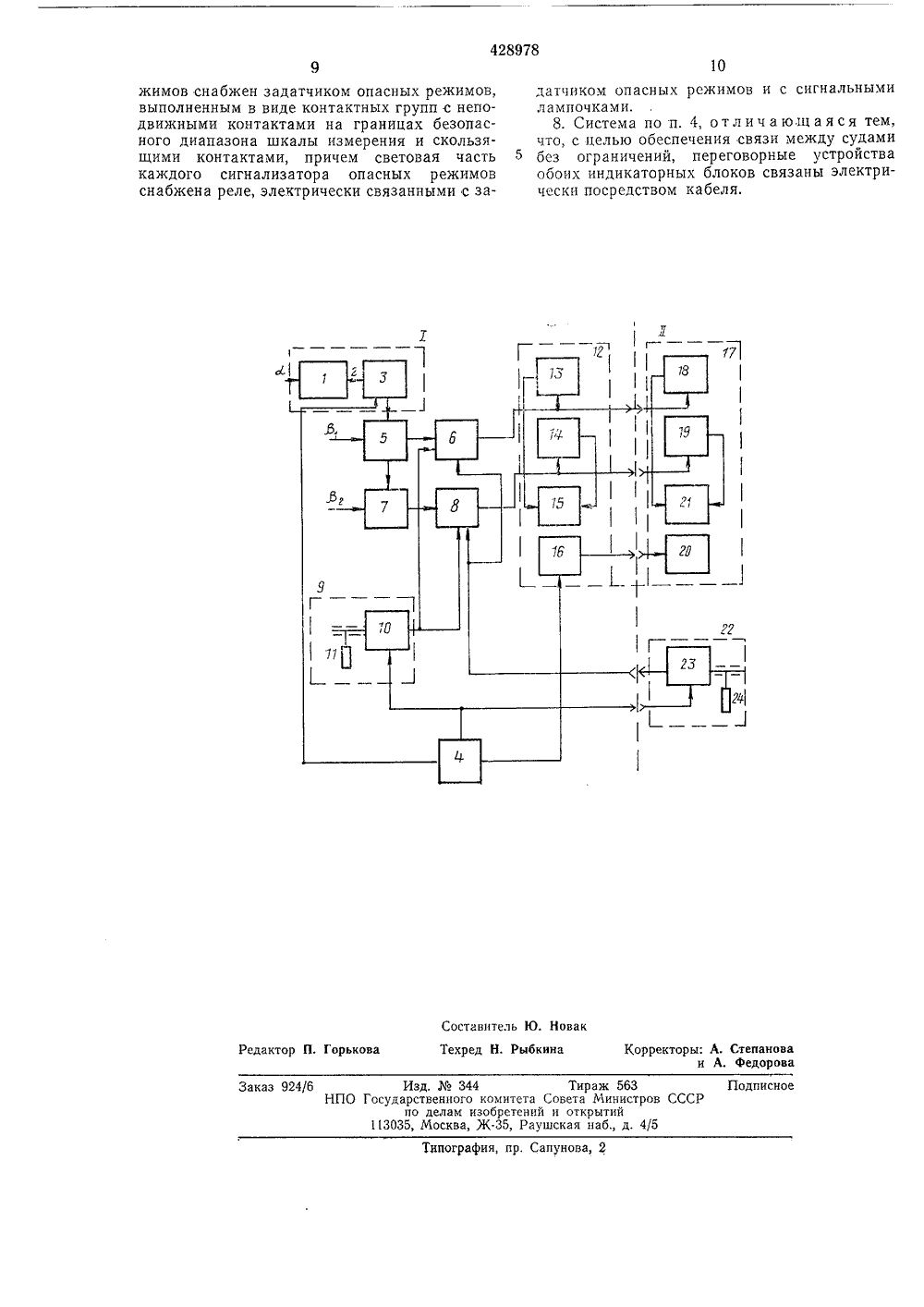
Взамен ранее изданного О П И СА 1 т И Е пц 428978ИЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(43) Опубликовано 15,02,78. Бюллетень М Государственный комитет Совета Министров СССРао делам изобретений,и открытий(72) Авторыизобрете В, Д. Завирухо, В, Г. Назаров, В. В. Веремей и В. В, Василевский 1) Заявитель 54) СИСТЕМА ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ СУДОВ ПРИ ГРУЗОПЕРЕДАЧЕ ТРАВЕРЗНЫМ СПОСОБОМ но четко определять граниботы траверзной передачи гр возм ной ачки каждыи маятниковым инематически отора СКВТ, язан с обоими итания я элек Изобретение относится к области грузовых операций, в частности, к системам определения взаимного положения судов при грузопередаче на ходу траверзным способом.Известна система определения взаимного положения судов при грузопередаче траверзным способом по тросу, натягиваемому с помощью лебедки, содержащая два полукомплекта, первый - на разгружаемом, а второй - на принимающем груз судне, причем в состав первого полукомплекта входят датчик длины натянутого между судами троса, выполненный в виде кинематнчески связанных с лебедкой редуктора и линейного вращающегося трансформатора (ЛВТ), датчик взаимного продольного перемещения судов в горизонтальной плоскости, выполненный в виде кинематически связанного с тросом и электрически - с указанным ЛВТ синусно-косинусного вращающегося трансформатора (СКВТ), и источник питания, а в состав каждого полу- комплекта входит индикаторный блок, содержащий светозвуковой сигнализатор опасных режимов и для первого полукомплекта - индикатор расстояния между судами.Основным недостатком известной системы является низкая надежность и точность измерения расстояния между судами, вследствие чего не ож цы безопас ра У зов.Цель изобретения - повышение надежности и точности измерений.Для этого трос выполнен в виде многожильного кабеля, электрически связывающего оба полукомплекта, каждый полукомплект снабжен датчиком бортовой качки, а первый полу- комплект - двумя суммирующими трансформаторами и датчиком отклонения троса в вертикальной плоскости, выполненным в виде кинематически связанного с тросом СКВТ, причем СКВТ датчика взаимного продольного перемещения судов в горизонтальной плоскости электрически связан с первым суммирующим трансформатором и с СКВТ датчика отклонения троса в вертикальной плоскости, а последний СКВТ - со вторым суммирующим трансформатором,Для учета влияния бортовой кдатчик бортовой качки снабженчувствительным элементом и ксвязанным с ним посредством рстатор которого электрически свсуммирующими трансформаторами,С целью обеспечения стабильного п обоих полукомплектов источник питани55 60 65 3трически связан с ЛВТ, с СКВТ датчиков бортовой качки и через индикаторный блок первого полукомплекта - с индикаторным блоком второго.С целью унификации оборудования и повышения надежности информирования о работе системы индикаторные блоки обоих полукомплектов выполнены аналогичными и снабжены каждый переговорным устройством и индикатором взаимного продольного перемещения судов, а индикаторный блок второго полу- комплекта - индикатором расстояния между судами, причем в каждом индикаторном блоке индикатор взаимного продольного перемещения судов электрически связан через сигнализатор опасных режимов с индикатором расстояния между судами,Для обеспечения контроля за траверзным расстоянием между судами и взаимным продольным перемещением судов при грузопередаче первый суммирующий трансформатор электрически связан с каждым индикатором взаимного продольного перемещения судов, а второй суммирующий трансформатор электрически связан с каждым индикатором расстояния между судами,Для обеспечения возможности наблюдения тенденции изменения измеряемых параметров в индикаторных блоках обоих полукомплектов индикаторы выполнены в виде стрелочных приборов,С целью получения всесторонней информации об измерениях и предотвращения аварийных ситуаций оба индикаторных блока снабжены световыми сигнальными транспарантами, а каждый сигнализатор опасных режимов снабжен задатчиком опасных режимов, выполненным в виде контактных групп с неподвижными контактами на границах безопасного диапазона шкалы измерения и скользящими контактами, причем световая часть каждого сигнализатора опасных режимов снабжена реле, электрически связанными с задатчиком опасных режимов и с сигнальными лампочками, С целью обеспечения связи между судами без ограничений переговорные устройства обоих индикаторных блоков связаны электрически посредством кабеля,На чертеже изображена блок-схема предлагаемой системы,Предлагаемая система базируется на отдельной маломощной, имеющей мягкую характеристику лебедке, работающей после закрепления троса на принимающем судне в режиме выбирания (торможения). При этом трос выполнен в виде многожильного кабеля.Система выполнена из двух полукомплектов, имеющих между собой кабельную электрическую связь: 1 - полукомплект на передающем судне и 11 - полукомплект на принимающем судне.Полукомплект 1 состоит из следующих элементов. Датчик длины троса содержит редуктор 1, посредством которого вал кабельной лебедки (на чертеже не показана) механически 5 10 15 20 25 зо 35 40 45 50 4соединен с ротором 2 ЛВТ 3. На первичную обмотку ЛВТ 3 подается от источника 4 питания стабилизированное напряжение 0=60 В с 1=400 гц, а его вторичная обмотка соединена с первичной обмоткой СКВТ 5 - датчика взаимного продольного перемещения судов в горизонтальной плоскости, Вторичная синусная обмотка СКВТ 5 соединена с первичной обмоткой суммирующего трансформатора 6, косинусная - с первичной обмоткой СКВТ 7 - датчика отклонения троса в вертикальной плоскости. Вторичная косинусная обмотка СКВТ 7 соединена с одной из первичных обмоток суммирующего трансформатора 8.Датчик 9 бортовой качки состоит из СКВТ 10 - преобразователя угла бортовой качки в электрический сигнал, маятникового чувствительного элемента 11, механически соединенного с ротором СКВТ 10, на первичную обмотку которого подается стабилизированное напряжение У=О - 60 в с =400 Гц от источника 4 питания, а вторичная обмотка его соединена с одной из первичных обмоток суммирующих трансформаторов 6 и 8,Индикаторный блок 12 установлен на ходовом мостике судна, состоящем из двух стрелочных приборов: индикатора 13 взаимного продольного перемещения судов, электрически соединенного со вторичной обмоткой суммирующего трансформатора 6; индикатора 14 расстояния между судами по перпендикуляру к диаметральной плоскости передающего судна, электрически соединенного со вторичной обмоткой суммирующего трансформатора 8,Полукомплект 1 содержит так; сигнализатор 15 опасных режимов работы грузопсредачи (опасное опережение или отставание, опасное сближение или расхождение),Сигнализатор 15 состоит из четырех электрических реле, которые обеспечивают включение сигнальных лампочек соответствующих световых сигнальных транспарантов. Реле электрически соединены с задатчиками опасных режимов работы, которые встроены в индикаторы 13 и 14 и представляют собой контактные группы: с неподвижным контактом на граничных участках безопасного диапазона работы шкалы измерения и со скользящим контактом, закрепленным на стрелке индикаторов,Полукомплект 1 имеет также проводное переговорное устройство 16 и источник 4 питания, подающий стабилизированное питание 0=60 В с ,=400 Гц па первичную обмотку ЛВТ 3 У=О - 60 В с =400 Гц и на силовую обмотку СКВТ 10, 0=12 В постоянного тока на проводное переговорное устройство 16,Полукомплект 11 системы на принимающем судне содержит следующие узлы.Индикаторный блок 17 установлен на ходовом мостике принимающего судна и по конструкции аналогичен индикаторному блоку на передающем судне. Индикаторы 18 и 19 этого блока электрически соединены посредством5кабеля со вторичными обмотками суммирующих трансформаторов 6 и 8.Проводное переговорное устройство 20 соединено электрически посредством кабеля с аналогичным устройством 16 на передающем судне, Кроме того, индикаторный блок содержит сигнализатор 21 опасных режимов,Дачик 22 бортовой качки имеет конструкцию, аналогичную конструкции датчика 9 бортовой качки на передающем судне. Первичная и вторичная обмотки СКВТ 23 соединены посредством кабеля соответственно с источником 4 питания и первичными обмотками суммирующих трансформаторов 8 и 6, находящихся на передающем судне. Датчик содержит маятниковый чувствительный элемент 24, аналогичный маятниковому чувствительному элементу 11.Описанная система работает следующим образом.Сигнал угла а поворота барабана лебедки измерительного кабеля подается через редуктор 1 с передаточным числом 1/400 на ЛВТ 3.Напряжение У снимаемое со вторичной обмотки ЛВТ 3, пропорционально углу а поворота барабана лебедки измерительного кабеля или, что то же самое, длине измерительного кабеля Напряжение У подается с ЛВТ 3 на обмотку возбуждения (первичную) СКВТ 5 - датчика взаимного продольного смещения судов в горизонтальной плоскости,СКВТ 5 смонтирован у направляющей троса - кабеля, которая имеет возможность свободно разворачиваться как в горизонтальной, так и в вертикальной плоскостях, т. е. имеет возможность задавать углы отклонения кабеля от траверзы (перпендикуляра к диаметральной плоскости передающего судна) как в горизонтальной ,), так и в вертикальной (г) плоскостях. Сигнал угла р, подается на ротор СКВТ 5, со вторичных обмоток которого снимается напряжение:с синусной Уг =КУ, яп 8,;с косинусной Уг - КОсоягде К - коэффициент трансформации.Отсюда следует, что напряжение Ур пропорционально величине взаимного продольного перемещения судов, а Уз пропорционально расстоянию между судами по перпендикуляру к диаметральной плоскости передающего судна без учета угла р, отклонения кабеля от траверзы в вертикальной плоскости.Напряжение У подается на одну из первичных обмоток суммирующего трансформатора 6, Напряжение У, подается на первичную обмотку последующего СКВТ 7 - датчика угла отклонения троса в вертикальной плоскости,СКВТ 7 смонтирован аналогично СКВТ 5 у направляющей кабеля. На его ротор подается сигнал угла р.6Напряжение, снимаемое со вторичной косинусной обмотки СКВТ 7, равно:04 КУг Совт. е. это напряжение пропорционально расстоянию между судами по перпендикуляру к диаметральной плоскости передающего судна с учетом угла г.Напряжение У 4 подается на одну из первичных обмоток суммирующего трансформатора 8,Напряжения У, и У 4 представляют информацию о взаимном положении судов, но имеют в себе информацию о взаимной бортовой качке,Для устранения влияния бортовой качки передающего и принимающего судов на результаты измерения предусмотрены датчики 9 и 22 качки на этих судах и суммирующие трансформаторы 6 и 8.Маятниковые чувствительные элементы 11 и 24 на передающем и на принимающем судах жестко связаны с роторами СКВТ, соответственно 10 и 23 и благодаря своему свойству - инерционности, стремятся при качке сохранить положение вертикали, Статор СКВТ, жестко связанный с судном, следит за бортовой качкой, т. е. возникает угол рассогласования ротора и статора СКВТ, равный углу качки.Обмотки возбуждения СКВТ 10 и 23 на передающем и на принимающем судах запитаны стабилизированным напряжением от источника 4 питания Уг, Ув с =400 Гц.Напряжения, снимаемые со вторичных (синусных) обмоток этих СКВТ, соответственно равны 40 45 50 55 60 65 5 10 15 20 25 Зо 35 У 7 -- КОв81 п 11 )в - Квз 1 п 1 ггде К - коэффициент трансформации;у, - угол бортовой качки передающегосудна;у - угол бортовой качки принимающегосудна,Напряжения Уг, У 7, У 8 подаются раздельнона первичные обмотки суммирующего трансформатора 6, напряжения У 4, Г, У, подаются аналогичным образом на первичные обмотки суммирующего трансформатора 8.Напряжения на выходе суммирующихтрансформаторов 8 и 6 определяются соответственноУв Ц 1 О 4 + Пгниг + 0381где и; - коэффициент трансформации по соответствующему входу.Напряжение У, определяет информацию орасстоянии между судами по перпендикулярук диаметральной плоскости передающего суднаа с учетом всех вышеперечисленных попр авок.Напряжение Уопределяет информацию овзаимном продольном перемещении судов пригрузопередаче,Эти напряжения подаются на стрелочные индикаторы на передающем судне, а черсз кабель - на принимающее судно.Сигнализация опасных режимов работы - опасное расхождение, опасное сближение, опасное опережение, опасное отставание - осуществляется следующим образом.На стрелочных индикаторах 14 и 19 и 13, 18 расстояния между судами по перпендикуляру к диаметральной плоскости передающего судна и взаимного продольного перемещения соответственно имеются зоны шкалы, соответствующие расстояниям опасного сближения и расхождения, опасного опережения и отставания, отмеченные красной краской, а между этими зонами рабочий диапазон отмечен черной краской.Так как сигнализация подобным образом вынесена непосредственно на индикаторы, то упрощается работа командиров судов или рулевых по управлению судами при грузопередаче.Помимо этой сигнализации предусмотрена сигнализация световая и звуковая, которая ср а батыв ает следующим о бр азом. По достижении стрелками индикаторов начальных участков опасных зон шкал замыкается контакт, скрепленный со стрелкой, и контакт на границе участков опасных зон, включаются соответствующие реле сигнализаторов 15 и 21 и замыкаются цепи осветительных лампочек световых сигнальных транспарантов с соответствующими надписями, находящихся на индикаторном блоке, а также включается звуковая сигнализация.Двусторонняя командная связь между судами при грузопередаче осуществляется посредством проводных переговорных устройств 16 и 20 через кабель. Формула изобретения 1, Система определения взаимного положения судов при грузопередаче траверзным способом по тросу, натягиваемому с помощью лебедки, содержащая два полукомплекта, первый - на разгружаемом, а второй - на принимающем груз судне, причем в состав первого полукомилекта входят датчик длины натянутого между судами троса, выполненный в виде кинематически связанных с лебедкой редуктора и линейного вращающегося трансформатора (ЛВТ), датчик взаимного продольного перемещения судов в горизонтальной плоскости, выполненный в виде кинематически связанного с тросом и электрически - с указанным ЛВТ синусно-косинусного вращающегося трансформатора (СКВТ), и источник питания, а в состав каждого полукомплекта входит индикаторный блок, содержащий светозвуковой сигнализатор опасных режимов и для первого полукомплекта - индикатор расстояния между судами, отличающаяся тем, что, с целью повышения надежности и точности измерений, трос вь 1 полнен в виде многожильного 5 10 15 20 25 зо 35 40 45 50 55 б 0 65 Якабеля, электрически связывающего оба полу- комплекта, каждый пол укомплект снабжен датчиком бортовой качки, а первый полукомплект - двумя суммирующими трансформаторами и датчиком отклонения троса в вертикальной плоскости, выполненным в виде кинематически связанного с тросом СКВТ, причем СКВТ датчика взаимного продольного перемещения судов в горизонтальной плоскости электрически связана с первым суммирующим трансформатором и с СКВТ датчика отклонения троса в вертикальной плоскости, а последний СКВТ - со вторым суммирующим трансформатором.2. Система по и. 1, отличающаяся тем, что, с целью учета влияния бортовой качки, каждый датчик бортовой качки снабжен маятниковым чувствительным элементом и кинематически связанным с ним посредством ротора СКВТ, статор которого электрически связан с обоими суммирующими трансформаторами.3. Система по и. 1, о т л и ч а ю щ а я с я тем, что, с целью обеспечения стабильного питания обоих полуко мил ектов, источник питания электрически связан с ЛВТ, с СКВТ датчиков бортовой качки и через индикаторный блок первого иолукомллекта - с индикаторным блоком второго. 4. Система по и. 1, отличающаяся тем, что, с целью унификации оборудования и повышения надежности информирования о работе системы, индикаторные блоки обоих полукомплектов выполнены аналогичными и снабжены каждый переговорным устройством и индикатором взаимного продольного перемещения судов, а индикаторный блок второго полукомплекта - индикатором расстояния между судами, причем в каждом индикаторном блоке индикатор взаимного продольного перемещения судов электрически связан через сигнализатор опасных режимов с индикатором расстояния между судами.5. Система по п. 4, о т л и ч а ю ш а я с я тем, что, с целью обеспечения контроля за траверзным расстоянием между судами и взаимным продольным перемещением судов при грузо- передаче, первый суммирующий трансформатор электрически связан с каждым индикатором взаимного продольного перемещения судов, а второй суммирующий трансформатор электрически связан с каждым индикатором расстояния между судами.6, Система ио и. 4, отличающаяся тем, что, с целью обеспечения возможности наблюдения тенденции изменения измеряемых параметров, в индикаторных блоках обоих полукомплектов индикаторы выполнены в виде стрелочных приборов.7. Система по и. 4, о т л и ч а ю щ а я с я тем, что, с целью получения всесторонней информации об измерениях и предотвращения аварийных ситуаций, оба индикаторных блока снабжены световыми сигнальными транспарантами, а каждый сигнализатор опасных реПодписное Заказ 924/6 Изд.344 Тираж 563 НПО Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Типография, пр. Сапунова, 2 жимов снабжен задатчиком опасных режимов, выполненным в виде контактных групп с неподвижными контактами на границах безопасного диапазона шкалы измерения и скользящими контактами, причем световая часть каждого сигнализатора опасных режимов снабжена реле, электрически связанными с задатчиком опасных режимов и с сигнальными лампочками.8. Система по п, 4, отличающаяся тем, что, с целью обеспечения связи между судами без ограничений, переговорные устройства обоих индикаторных блоков связаны электрически посредством кабеля.
СмотретьЗаявка
1646180, 05.04.1971
В. Д. Завирухо, В. Г. Назаров, В. В. Версией, В. В. Василевский
МПК / Метки
МПК: B63B 27/18
Метки: взаимного, грузопередаче, положения, способом, судов, траверзным
Опубликовано: 25.05.1974
Код ссылки
<a href="https://patents.su/5-428978-sistema-opredeleniya-vzaimnogo-polozheniya-sudov-pri-gruzoperedache-traverznym-sposobom.html" target="_blank" rel="follow" title="База патентов СССР">Система определения взаимного положения судов при грузопередаче траверзным способом</a>
Устройство для передачи грузов между судами в море

Номер патента: 592665
Опубликовано: 15.02.1978
Автор: Шишкин
МПК: B63B 27/12
Метки: грузов, между, море, передачи, судами
...концы направляющих тросов 16 закрепляются на палубе судна на торцовых сторонах разгружаемой ячейки и тросы 16 обтягиваются вспомогательными лебедками моста 1. По направляющим тросам 16 приспособление 14 опускается в ячейку трюма и захватывает груженый контейнер 24. Захваченный груженый контейнер поднимается из ячейки грузовыми лебедками крана над палубой; отдаются нижние концы направляющих тросов 16 и мостовой кран с груженым контейнером 24 перемещается к обменной площадке 5, установленной на рабочем борту судна 3. После остановки моста над приемным местом обменной площадки 5, предназначенным для груженого контейнера 24, нижпис концы направляющих тросов закрепляются на ней, после чего тросы 16 обтягиваются, Контейнер 24 опускается на...
Устройство для передачи грузов между судами

Номер патента: 439438
Опубликовано: 15.08.1974
Авторы: Бородин, Касьянов, Маслов, Рогулин, Тимошенко
МПК: B63B 27/22
Метки: грузов, между, передачи, судами
...суда,пйраллельпым к рсом, сб;1 ИРкаотся нй рстояние, близкое к рабочему, и уравпивсвою скорость. За борт судна снабжения оЗО скают гндродипампческос сопротивлениеприкрепленное к свободному концу несущего каната 1, и, стравливая несущий канат через стопор 6, выводят гидродинамическое сопротивление в положение подводного буксирования. После этого несущий канат фиксируют стопором 6 Суда сходятся на расстояние мень. ше рабочего, и на принимающем судне в точке 2 крепится поданный с судна снабжения конец несущего каната. После закрепления конца несущего каната на принимающем судне слабину в несущем канате выбирают за счет отпускания стопора 6, так как под воздействием буксируемого гидродинамического сопротивления несущий канат...
Система управления двухканатной грузовой дорогой между судами в море на ходу

Номер патента: 600025
Опубликовано: 30.03.1978
Авторы: Власьев, Демидович, Завирухо
МПК: B63B 27/18
Метки: грузовой, двухканатной, дорогой, между, море, судами, ходу
...и принимающего устройств установлены в их верхнее положение (исходное) соответственно грузовой контейнер и голова приемного устройства, блоки 14 и 23 выдают сигналы в блок 17 коммутации и блоки 12 и 25 контроля. По этому сигналу блок 17 подключает выход задатчика 19 к входу суммирующего элемента 3 блока 1. При этом сигнал с выхода задатчика 19 через элемент 3 подается на вход усилителя 4, с выхода которого усиленный сигнал подается на управляющую обмотку реверсивного двигателя 5. Двигатель 5 через понижающий редуктор 6 перемещает люльку насоса 8 переменной производительности, задавая необходимую производительность гидроприводу 9 и направление его отработки на обеспечение движения контейнера с грузом в сторону принимающего груз...
Устройство для передачи грузов между судами в море в условиях качки

Номер патента: 893700
Опубликовано: 30.12.1981
МПК: B63B 27/30
Метки: грузов, качки, между, море, передачи, судами, условиях
...влево (прямая (д(Ь) на фиг. 6). Рабочая точка этого электродвигателя переходит в точку В. Как только усилие в ветви каната электродвигателя 15 станет больше, чем усилие в другой ветви, и достаточно, чтобы прокрутить лебедку электродвигателя 16 в сторону Травить, начнется перемещение тележки 6 в направлении принимающего судна. Электродвигатель 15 про О должает работать в двигательном режиме, его скорость будет увеличиваться в соответствии с характеристикой М(5) а натяжение в ветви каната, связанной с ним, уменьшается. В то же время электродвигатель 16 начнет вращаться в обратную сторону и 15 переходит в генераторный режим. Его скорость будет расти в соответствии с механической характеристикой, что приведет к росту его тока и к...
Устройство для передачи жидкого груза между судами в море

Номер патента: 925749
Опубликовано: 07.05.1982
Автор: Соболев
МПК: B63B 27/34
Метки: груза, жидкого, между, море, передачи, судами
...1 с поворотной муфтой 3 выполнено байонетного типа. МуФта 3 снабжена рукояткой 9, на которую накинут взаимодействующий с ней конец гибкой стяжки 1 О. Последний продет сквозь закрепленную на принимающем судне 1 над муФтой 3 направляющую скобу 11, а вторым концом прикреплен к несущему канату 6, который закреплен на принимающем судне посредством скобы 12 с тарированным закладным болтом 13, играющим роль "слабого звена".Устройство работает следующим образом. Перед началом передачи жидкого груза устройство приводят в рабочее положение, Для этого несущий канат 6 присоединяют к принимающему судну 1 посредством скобы 12, закладной тарированный болт 13, который является нслабым звеном", После этого передающий шланг 5 с наконечником ч...
Предыдущий патент: Якорное устройство для позиционных морских объектов
Следующий патент: Устройство для сбора нефтепродуктов с поверхности воды
Случайный патент: Способ получения спирта из крахмала зерновых культур