Система управления профилегибочным агрегатом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 946710
Автор: Прудков
Текст
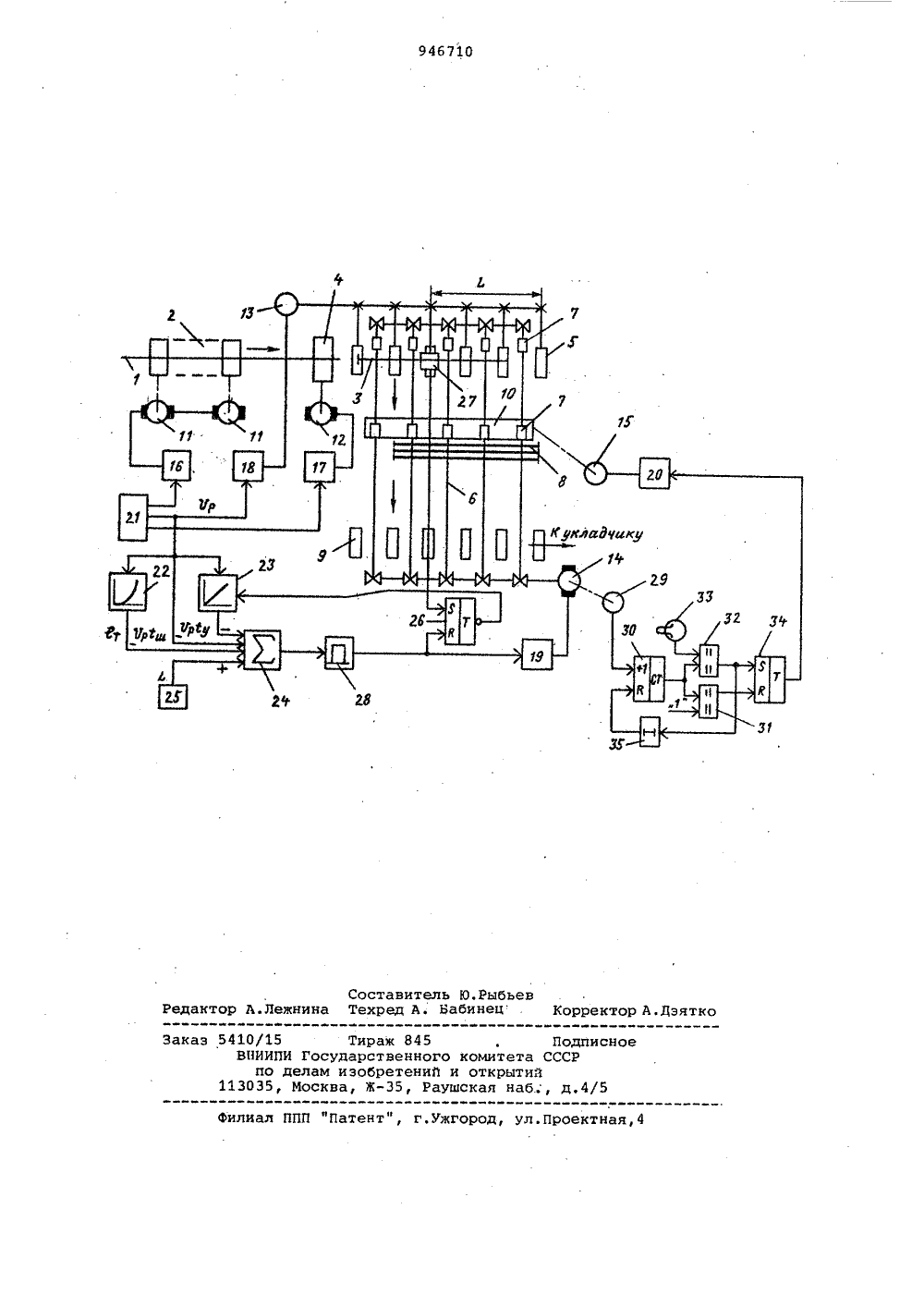
Союз СоветскихСоциалистическихРеспублик ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ п 946710(22) Заявлено 16.02. 81 (21) 3248410/22-02с присоединением заявки МР -(23) Приоритет -Опубликовано 300782, Бюллетень Мо 28 1 Щ М,кл,з В 21 В 37/00 Государственный комитет СССР по делам изобретений и открытийДата опубликования описания 300782+-ЧАР; 1 1,М.Л.Прудков Государственный проектный институт "Электротяжхимпроект" уч н 1;:ии(54) СИСТЕМА УПРАВЛЕНИЯ ПРОФИЛЕГИБОЧНЫМ АГРЕГАТОМИзобретение относится к автоматизации прокатного производства,Наиболее близкой к предлагаемой . по технической сущности и достигаемому результату, является система управления профилегибочным агрегатом, содержащая приводы с блоками управления соответственно станом, летучими ножницами, отводящим роль- гангом и шлеппером, а также задатчик эталона скорости и датчик профиля 1. К недостаткам системы относят низкое качество набора профилей в ряды, передаваемые к укладчику пакетов, вызываемое изменениями скорости прокатки. В данной системе настройка момента включения шлеппера для съема профиля с отводящего рольганга и передачи его в ряд не изменяется при возможных изменениях скорости прокатки и отводящего рольганга, что приводит к неровностям рядов, а затем и формируемых из них пакетов профилей, усложняет их обвязку, транспортировку и укладку в вагоны.Цель изобретения - повышение качества набора профилей в ряды, передаваемые к укладчику пакетов. Для достижения укаэанной цели система дополйительно содержит электрически соединенные с задатчикомэталона скорости и с входом блокауправления приводом отводящего рольганга квадратор, интегратор, сумматор, к первому входу которого подключен задатчик эталона скорости, а квторому, третьему и четвертому входамкоторого подключены соответственноисточник опорного напряжения, выходквадратора и интегратора, а такжепервый триггер, выход которого подключен к второму входу интегратора, 15 а вход - к датчику профиля, нуль-орган, вход которого подключен к выходу сумматора, а выход - к второмувходу первого триггера и к входублока управления приводом шлеппера, 20 механически связанный с последнимдатчик шага, последовательно включенные счетчик, вход которого соединен с датчиком шага, первая схемасовпадений, второй триггер, блок уп равления и привод поддерживающихлинеек и, кроМе того, задатчик числа,подключенный к второму входу первойсхемы совпадений, вторая схема совпадений, входкоторой подключен к 30 выходу счетчика, а выход - к второму5 1 О 60 65 входу второго триггера, и временной элемент, вход которого подключен к выходу первой схемы совпадений, а выход - к второму входу счетчика.На чертеже приведена Функциональная схема предлагаемой системы.Полоса 1 Формуется станом 2 в гнутый профиль и разрезается на мерные профили 3 летучими ножницами 4. Отводящим рольгангом 5 профили транспортируются к шлепперу б. Последним с помощью захватов 7 профили 3 на ходу снимаются с рольганга 5 и набираются в ряд 8. Сформированный ряд 8 перемещается шлеппером б на рольганг 9 укладчика благодаря поддерживающим 5 линейкам 10, которые, поднимаясь, удерживают захваты 7 от опрокидывания. Стан 2, летучие ножницы 4, отводящий рольганг 5, шлеппер б, поддерживающие линейки 10 имеют приводы соответственно 11, 12, 13, 14 и 15 с блоками управления соответственно 16, 17, 18, 19 и 20. Задатчик 21 эталона скорости, выходы которого подключены к входам блоков 16-18, регламентирует скорость стана 2, летучих ножниц 4 и отводящего рольганга 5. К выходу задатчика 21 и к входу блока 18 подключены входы квадратора 22, интегратора 23 и сумматора 24, другие входы которого соединены с источником 25 опорного напряжения и выходами квадратора 22 и интегратора 23. К входу сброса последнего подключен инверсный выход Ю-триггера 26, Б-вход которого соединен с датчиком 27 профиля, а К-вход - с выходом нуль-органа 28. Выход нуль-органа 28 подключен также к входу блока 19 управления приводом 14 шлеппера б.С последним механически связан 40 датчик 29 шага, подключенный к счетному входу счетчика 30. Выход последнего подключен к входам схем 31 и 32 , совпадений. На второй вход схемы 31 . совпадений подан постоянный сигнал, 45 соответствующий числу "1", а к второму входу схемы 32 совпадений подключен эадатчик 33 числа. Выходы схем31 и 32 совпадений подключены соответственно к Й и Я-входам ЙЯ-триггера34, выход которого соединен с входом блока 20 управления приводом 15 поддерживающих линеек 10. Выход схемы32 совпадений подключен также к входу временного элемента 35, а выход последнего - к входу сброса счетчика 30. Система работает следующим образом,При транспортировании профиля 3 отводящим рольгангом 5 и его подходе к датчику 27 момент включения привода 14 шлеппера б для снятия профиля 3 с рольганга 5 и передачи его в ряд 8 определяется на основании алгоритма, обеспечивающего постоянство положения торцов профилейв ряду при любой скорости отводящего рольганга 5. Ъ су ЧР си 1 т 0 (1) где Е - расстояние от датчика 27профиля до границы отводящего рольганга 5;Ч - скорость отводящего рольРганга 5;промежуток времени движенияЧпрофиля 3 по рольгангу 5 отмомента срабатывания датчика 27 до момента подачи команды на включение шлеппераб для съема профиля 3 срольганга 5;промежуток времени движенияпрофиля 3 по рольгангу 5 отмомента подачи команды навключение шлеппера б домомента схода с рольганга5 профиля 3 при перемещенииего в ряд 8;1 - путь торможения профиля 3от сил трения со скоростиЧр до нуля во время перемещения его шлеппером б в ряд8 после съема с рольганга 5.. Как известно, путь торможения отсил трения1 т - КЧр ) (2)где К - постоянный коэффициент.Составляющие алгоритма (1) образуются: величина Ь - источником 25опорного напряжения; 1 - квадратом 22; Ч 1, - задатчйком 21 эталона скорости, поскольку промежутоквремени 1 щ в различных циклах одинаков; Чр С+-интегРатоРом 23, интегрирование которым входного сигналаЧр начинается после исчезновениясигнала сброса с выхода триггера 26.Алгебраическое суммирование сигналов,соответствующих составляющим алгоритма (1), выполняется сумматором24,При включении триггера 26 датчиком 27 профиля 3 исчезает сигналсброса интегратора 23 и начинаетсяувеличение его выходного сигнала.Это вызывает уменьшение выходного сигнала сумматора 24. При снижении сигнала до нуля срабатывает нуль-орган28, который выдает команду блоку 19управления приводом 14 шлеппера бна выполнение шага для съема проФиля 3 с рольганга 5 и перемещенияего в ряд 8. Одновременно выходнымсигналом нуль-органа 28 сбрасывается триггер 26.Благодаря зависимости составляющих алгоритма (1) от скорости ЧРотводящего рольганга 5 при изменениях этой скорости изменяется момент включения шлеппера б для съема профилей 3. Положение профилей 3 в ряду 8 при этом не изменяется. Торцы профилей 3 в ряду 8 располагаются всегда по одной линии, т.е. качество набора рядов 8 повышает ся.После окончания шага шпеппером б его захваты 7 опрокидываются, если поддерживающие линейки 10 опуцены. Это предотвращает перемещение 10 несформированного ряда 8 на роль- ганг 9 укладчика при следующих шагах шлеппера, поскольку рольганг 9 укладчика отстоит от отводящего роль- ганга 5 на расстоянии двух шагов 15 шлеппера б. В дальнейшем циклы съема профилей 3 с рольганга 5 и перемещения их в ряд 8 повторяются.Количество профилей 3, 1 еремещаемых в ряд 8, отсчитывается счетчиком 30 по сигналам датчика 29 шага шлеп- пера б. При перемещении шлеппером б профиля 3, номер которого в ряду 8 совпадает с числом заданным задатчиком 33 числа, т.е. по окончании формировании ряда 8, срабатывает схема 32 совпадений и триггер 34, по сигналу которого через блок 20 управления приводом 15 поднимаются поддерживающие линейки 10. При этом после окончания перемещения профиля 3 в ряд 30 8 захваты 7 не опрокидываются. С выдержкой времени временного элемента 35 производится сброс счетчика 30.При последующем съеме с рольганга 5 профиля 3, являющегося первым для 35 нового ряда 8, захваты 7 шлеппера б переМещают сформированный предыдущий ряд 8 на рольганг 9 укладчика. И по сигналу "1" на выходе счетчика 30 срабатывает схема 31 совпадений, 40 сбрасывается триггер 34 и поддерживающие линейки 10 опускаются. Захваты 7 при этом опрокидываются и при следующем шаге шлеппера 6 не смогут перемещать профиль 3 ряда В на рольганг 9 укладчика.В дальнейшем цикл набора профилей 3 в ряд 8 повторяется.Таким образом, благодаря дополнению системы элементами, с помощью которых при изменениях скорости отводящего рольганга изменяется момент включения шлеппера для сохранения положения торцов профилей в рядах при любой скорости, повышается качество набора рядов профилей, передаваемых к 55 к укладчику пакетов.1 Формула изобретенияСистема управления профилегибочным агрегатом, содержащая приводы сблоками управления соответственностаном, летучими ножницами, отводя-щим рольгангом и шлеппером, а такжезадатчик эталона скорости и датчикпрофиля, о т л и ч а ю щ а я с ятем, что., с целью повышения качестванабора профилей в ряды, передаваемыек укладчику пакетов, она дополнительно содержит блок управления приводомподдерживающих линеек, задатчик числа, квадратор, интегратор, сумматор,источник опорного напряжения, дватриггера, нуль-орган, датчик шага,механически связанный с приводом шлеппера, счетчик, две схемы совпаденияи временной элемент, причем, входквадратора, первый вход интегратора,первый вход сумматора соединен с входом блока управления приводом отводящего рольганга и с задатчиком эталона скорости, к второму, третьему ичетвертому входу сумматора подсоединены соответственно источник опорного напряжения, выходы квадратора иинтегратора,. а также первый входпервого триггера, выход которого соединен с вторым входом интегратора,а вход - с датчиком профиля, входнуль-органа соединен с выходом сумматора, а выход - с вторым входом первого триггера и с входом блока управления приводом шлеппера, первыйвход счетчика соединен с датчиком шага, а выход - с последовательно соединенныии первой схемой совпадения,вторым триггером, блоком управленияприводом поддерживающих линеек, задатчик числа подсоединен к второмувходу первой схемы совпадений, входвторой схемы совпадений соединен свыходом счетчика, а выход - с вторымвходом второго триггера, вход временного элемента соединен с выходомпервой схемы совпадения, а выход -со вторым входом счетчика,Источники информации,принятые во внимание при экспертизе 1. Тришевский И,С. и др. Современное состояние и перспективы совершенствования оборудования профилегибочных станов. Бюллетень НТИ "Черная металлургия", 1979, Р 1 (837), с.б.946710 каз 5410/15 Тираж 845 По ВНИИПИ Государственного комитета ССС по делам изобретений и открытий 113035, Москва, Ж, Раушская наб.;, д
СмотретьЗаявка
3248410, 16.02.1981
ГОСУДАРСТВЕННЫЙ ПРОЕКТНЫЙ ИНСТИТУТ "ЭЛЕКТРОТЯЖХИМПРОЕКТ"
ПРУДКОВ МАРК ЛЬВОВИЧ
МПК / Метки
МПК: B21B 37/00
Метки: агрегатом, профилегибочным
Опубликовано: 30.07.1982
Код ссылки
<a href="https://patents.su/4-946710-sistema-upravleniya-profilegibochnym-agregatom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления профилегибочным агрегатом</a>
Способ получения производных дигидро-10, 11дибензо-(ь, ) азепина или их солей или четвертичных аммониевых солей1изобретение относится к области лолучения соединений ряда азепина, которые могут -найти нрименение

Номер патента: 399124
Опубликовано: 01.01.1973
Автор: Иностранна
МПК: C07D 223/22
Метки: 11дибензо-ь, азепина, аммониевых, дигидро-10, которые, лолучения, могут, найти, нрименение, области, относится, производных, ряда, соединений, солей, солей1изобретение, четвертичных
...раза промывают дистиллированной водой общим объемом 60 см", ссрабатывают 0,1 г растительной сажи, сушат карбонатом калил и копцентриру 1 от. Остатск (11,0 г) растворяют в 25 см безво.юного кипящего этанола; к полученному раствору прибавляют кипящий раствор 4,45 г фумаровой кислоты в 65 см безводного этанола. После 3 час охлаждения при 2 С Выделившиеся кристаллы отсасывают, два раза промывают ледяпы;: безводным этгполо. Обидим объемом 20 см" и сушат в:акууме 20 мм рт. ст. Получают 13,7 г фумаратг 1-хлор-метилО- метилямипо,11-дигидродпбензо- (ЬЛ) - азсп пна, 1 плавящегося при 218 С,П р имер 4. К суспензпп 3,4 литцйалюмпнийгидратя в 300 с., беводого эфира пеболыд 1 пмп порпя.и прпб. В яот 8,58 г 2-хлор-ме". Ил-Ч 1 ормамидо - 10,11-ди 1...
Способ определения профиля поля скоростей текучей среды и устройство для его осуществления

Номер патента: 1786440
Опубликовано: 07.01.1993
Авторы: Алексашин, Балюбаш, Замарашкина, Скрипник
МПК: G01P 5/12
Метки: поля, профиля, скоростей, среды, текучей
...к электродам транзисторов подключают источник постоянного напряжения, смещающий р - и-переход в прямом направлении, Связь между токомчерез р - п-переход и падением напряжения О на нем определяется уравнением вольтамперной характеристики; О е вт(еч кт - 1) (1) где ое вт - ток насыщения, зависящий отабсолютной температуры Т,о - ток насыщения при Т -+ оо.В - коэффициент, имеющий размерность температуры и зависящий от ширинызоны перехода,с - заряд электрона,К - постоянная БольцманаУчитывая, что при температуре Т300Кзначение КТс 26 мВ, можноуравнение(3) Учитывая, что ток насыщения о , падение напряжения представим выражением: О = ---и(О/)Т, (4)КВ КЦ Ц,из которого видно; что падение напряжения на открытой р-и-переходе линейно зависит от...
Способ управления профилегибочным агрегатом и устройство для его осуществления

Номер патента: 1502148
Опубликовано: 23.08.1989
МПК: B21B 37/00
Метки: агрегатом, профилегибочным
...45. Однако рольганг 6 не включается выходным сигналом схемы 26 совпадений для отправки этого профиля к укладчику, так как отсутствует разрешающий сигнал схемы 45 совпадений на входе элемента И 40 и к Я-входу триггера 42 включающий сигнал схемы 26 совпадений не проходит, схема 26 совпадений срабатывает, поскольку на выходе счетчика 24 появляется число "1". При срабатывании элемента 45 сов. падений 53 через блок 19 управления и привод 17 поднимаются вторые поддерживающие линейки 15. Последние предотвращают опрокидывание захватов 8 шлеппера 3 н зоне рольганга 6 для возможности перемещения шлеппером 3 при его последующем ходе единичного профиля из ряда на ось рольганга 6 и отправки его к участку инспекции. При срабатывании элемента 45...
Устройство для подачи и управления скоростью заготовки при прокатке периодических профилей

Номер патента: 348267
Опубликовано: 01.01.1972
МПК: B21H 8/00
Метки: заготовки, периодических, подачи, прокатке, профилей, скоростью
...два захвата 24 и 25. Захваты снабжены гидроприводами 2 б и 27 зажима. Замкнутые направляющие 28, воздействуя на ползун 29 захвата, служат для принудительного возвращения захватов в исходное положение. Величина подачи заготовки в калибр рабочих валков 30 регулируется сменной конической парой 20 и радиусом кривошипа 1 б с помощью винта 31, а длина шатуна 17 - с помощью стяжной гайки 32.Механизм работает следующим образом, Постоянное вращение от электродвигателя 1 через шестеренную клеть 2, ведущий вал 3 и зубчатую пару 4 - 5 передается на ведущую шестерню 7 планетарной передачи и кулачковую пару 8. При постоянном вращении кулачковой пары 8 подвижная рамка 11 с опорными роликами 9 получает в зависимости от профиля кулачков 8...
Цифровой измеритель скорости и соотношения скоростей вращения

Номер патента: 857879
Опубликовано: 23.08.1981
Авторы: Гунченков, Денищенко, Стремлин
МПК: G01P 3/60
Метки: вращения, измеритель, скоростей, скорости, соотношения, цифровой
...схему ИЛИ 5 на прямой вход триггера 6, переводит его из состояния О в состояние 1. При этом положительный потенциал с прямого выхода триггера 6 открывает схемы И 7, 22, проходит через открытую схему И 15 на первый вход установки блока 16 индикации. С приходом очередного импульса с датчика 1 счетчик 3 начинает второй цикл счета. При приходе ближайшего, после окончания первого цикла счета счетчиком 3, импульса сравниваемой скорости, который проходит с выхода схемы И 18 через схемы И 14; ИЛИ 13, И 7 на прямой вход триггера 8, триггер 8 из состояния О переходит в состояние 1, на его инверсном выходе появляется потенциал, равный нулю, что приводит к закрытию схем И 2, 18 н прекращению работы счетчиков 3, 19, а положи10 20 Формула изобретения...
Предыдущий патент: Система управления участком формирования пакетов гнутых профилей
Следующий патент: Устройство регулирования ширины концов полос на непрерывных станах
Случайный патент: Зондирующее устройство для измерения параметров водной среды