Система управления судовым двигателем со статическим регулятором частоты вращения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
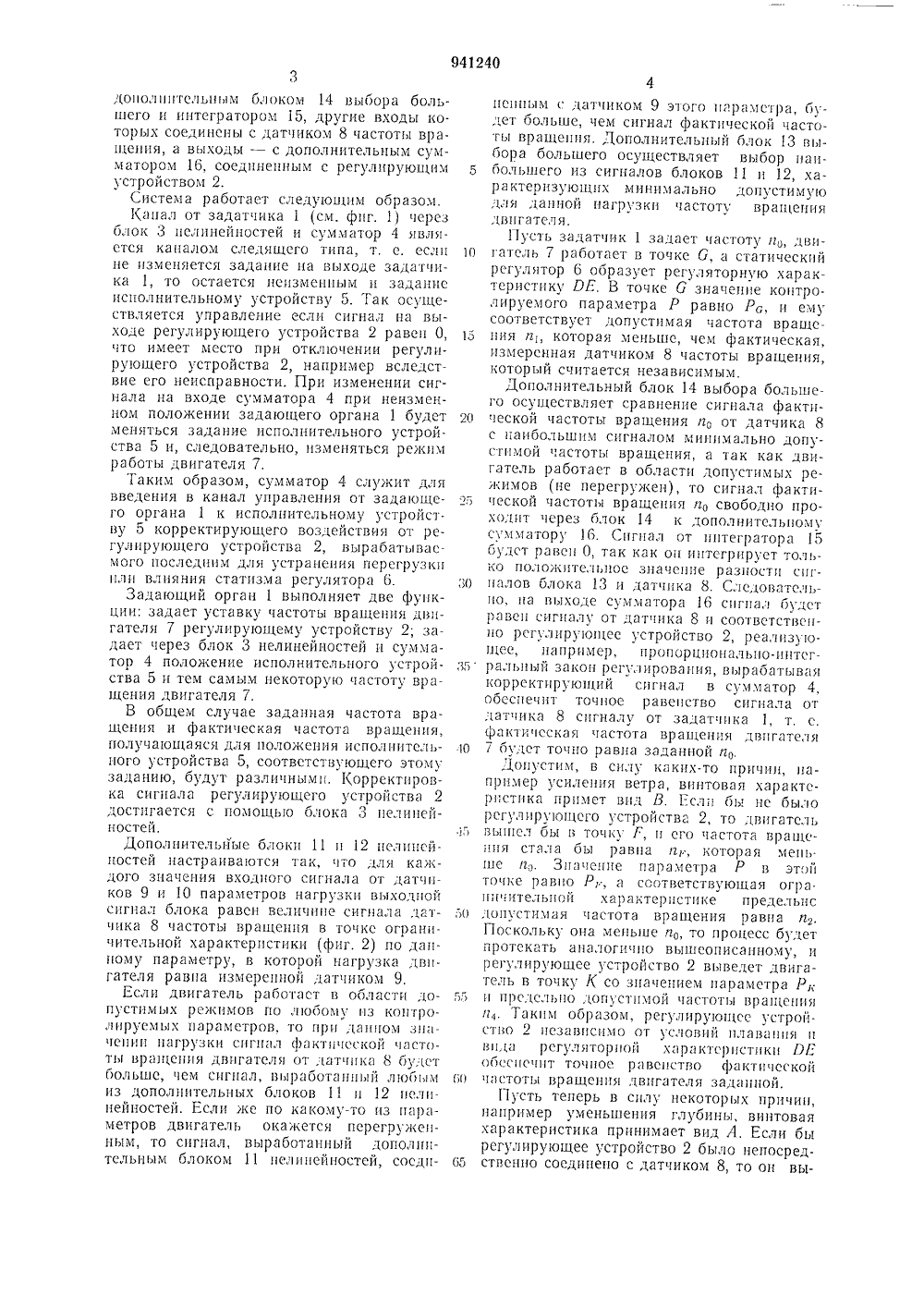
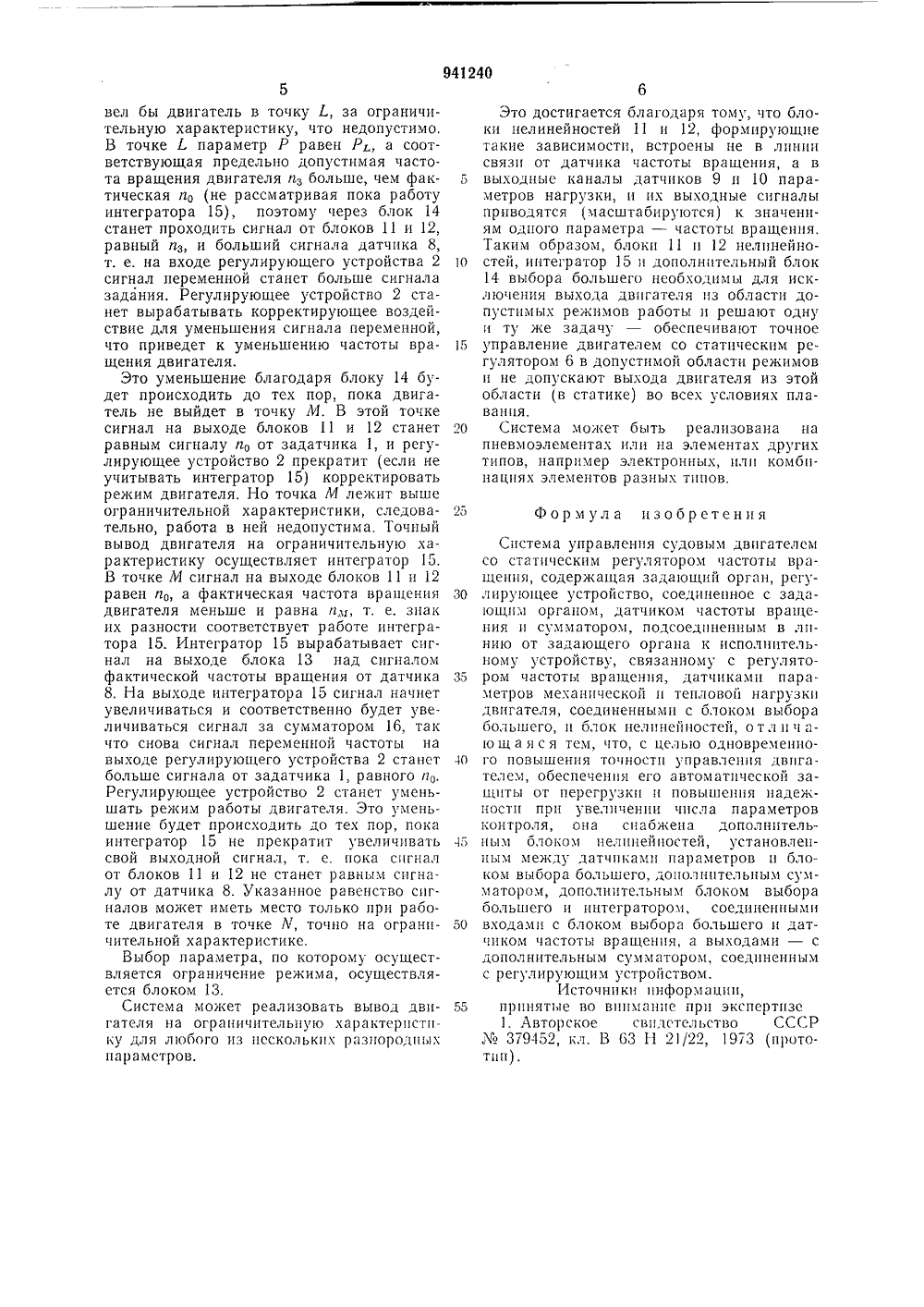
11941240 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советскик Социалистических(45) Дата опубликования описания 07,07.8 2) Авторы изобретени Ю. Н. Пушин(51) СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕСО СТАТИЧЕСКИМ РЕГУЛЯТОРОМ ЧАСТОТЫ ВРА 1 ЦЕН 1 дащи гу истемы обеспечи ерегрузки, но т у и не обеспеч п авления част вают з олько по одивают высо- отой враще 2статическим же задании й в зависцависящсй от Э )еменное подвигателем,защиты откности отонтроля. ЗО Изобретение относится к системам упр ления судовыми двигателями.Известны системы управления судовым двигателем со статическим регулятором частоты вращения, содержащие задающий орган, регулирующее устройство, соединенное с задающим органом, датчиком частоты вращения и сумматором, подсоединенным в линию от задающего органа к исполнительному устройству, связанному с регулятором частоты вращения, датчиками параметров механической и тепловой нагрузки двигателя, соединенными с блоком выбора большего, и блок нелинейностей 11. Известные сдвигателя от пному параметркой точности у рния двигателя.У двигателя, снабженногорегулятором, при одном и томчастота вращения будет разномости от нагрузки двигателя, зусловий плавания судна.Цель изобретения - одноврвышение точности управленияобеспечение его автоматическоперегрузки и повышение надеувеличения числа параметров Для достижения поставленной цели система снабжена дополнительными блоками целинейностей, установленными между датчиками параметров и блоком выбора большего, дополнительным сумматором, дополнительными блоком выбора большего и интегратором, соединенными входами с блоком выбора большего и датчиком частоты вращения, а выходами - с дополнительным сумматором, соединенным с регулирующим устройством,1-1 а фиг. 1 представлена блок-схема системы; на фиг. 2 - варианты винтовых характеристик А, В, С, регуляторная характеристика ЙЕ в координатах параметр контроля Р - частота вращения и.Система содержит задающий орган 1, соединенный с регулирующим устройством 2 и через блок 3 нелинейностей и сумматор 4 - с исполнительным устройством 5, связанным со статическим регулятором 6 частоты вращения двигателя 7, С двигателем 7 соединены датчик 8 частоты вращения и датчики 9 и 10 параметров механической и тепловой нагрузки двигателя, например температуры отработавших газов, давления на рамовые подшипники и т, п. Датчики 9 и 10 соединены через дополнительные блоки 11 и 12 нелинейностей с блоком 13 выбора большего, выход которого соединен сдоцолццтсльцьм Олоком 14 вьбора больдего н интегратором 15, другие входы которых соединены с датчиком 8 частоты вращения, а выходы - с дополнительным сумматором 16, соединенным с регулирующим устройством 2.Система работает следующим образом.1(ацал от задатчика 1 (см, фцг. 1) через блок 3 цслицейностей и сумматор 4 является каналом следящего типа, т. с. если це изменяется задание ца выходе задатчика 1, то остается неизменным и задание исполнительному устройству 5. Так осуществляется управление если сигнал на выходе регулирующего устройства 2 равен О, что имеет место при отключении регулирующего устройства 2, например вследствие его неисправности. При изменении сигнала на входе сумматора 4 при неизменном положении задающего органа 1 будет меняться задание исполнительного устройства 5 и, следовательно, изменяться режим работы двигателя 7.Таким образом, сумматор 4 служит для введения в канал управления от задающсго органа 1 к исполнительному устройству 5 корректирующего воздействия от регулирующего устройства 2, вырабатываемого последним для устранения перегрузки цлц влияния статизма регулятора 6.Задающий орган 1 выполняет две функции; задает уставку частоты вращения двигателя 7 регулирующему устройству 2; задает через блок 3 нелинейностей и сумматор 4 положение исполнительного устройства 5 ц тем самым некоторую частоту вращения двигателя 7.В общем случае заданная частота вращения и фактическая частота вращения, получающаяся для положения исполнительного устройства 5, соответствующего этому заданию, будут различными. 1(орректровка сигнала регулирующего устройства 2 достцГЯетс 51 с помогцью Олок 1 3 пс,1 ицсйцостей.Дополнительные блоки 11 ц 12 целицсйцостей настраиваются так, что для каждого значения входного сигнала от датчиков 9 и 10 параметров нагрузки выходной сигнал блока равен величине сигнала датчика 8 частоты вращения в точке ограничительной характеристики фиг. 2) по данному параметру, в которой нагрузка двигателя равна измеренной датчиком 9.Если двигатель работаст в области ;опустимых режимов по любому цз контролируемых параметров, то прц данном зн;- чсцгш нагрузки сцпгдл фактической частоты вращения двигателя от датчика 8 бу,ст больше, чем сцгцал, вьрдботаццый любым из дополнительных блоков 11 и 12 нелицейностей. Если же по какому-то цз параметров двигатель окажется перегруженным, то сигнал, выработшгцый дополнительным блоком 11 целццейцостсй, сосдц 5 1015 20 ) 5 50 1 О 5 50 10 05 псиным с датчиком 9 этого параметра, будет больше, чем сигнал фактической частоты вращения. Дополнительный блок 13 выбора большего осуществляет выбор цацОольшего из сигналов блоков 11 ц 12, характеризующих минимально допустимуо для данной нагрузки частоту вращения двцгатсля,Пусть задатчцк 1 задает частоту гг, двигатель 7 работает в точке сг, а статический регулятор 6 образует регуляторную характеристику г.Е. В точке сг значение контролируемого параметра Р равно Рс, ц ему соответствует допустимая частота вращения гг которая меньше, чем фактическая, измеренная датчиком 8 частоты вращения, который считается независимым,Дополнительный блок 14 выбора большего осуществляет сравнение сигнала фактической частоты вращения и, от датчика 8 с пабогьшм сигналом минимально допусцмой частоты вращения, а так как двигатель работает в области допустимых режимов (не перегружен), то сигнал фактической частоты вращения гг, свободно проходит через слок 14 к дополнительному сумматору 16. Сцпгдл от интегратора 15 будст рдвсц О, так как оц ццтсгрцруст только положительное значение разности сигналов блока 13 и датчика 8. Следовательно, на выходе сумматора 16 сигнал будет равен сигналу от датчика 8 ц соогвстствснпо рсгулируюпес устройство 2, реализующее, например, пропорционально-интегральный закон регулирования, вырабатывая корректирующий сигнал в сумматор 4, обеспечит точное равенство сигнала от датчика 8 сигцалу от задатчцка 1, т. с. срдктичсская частота вращения двигателя 7 будет точно равна заданной и,.Допустим, в силу кдких-то причин, например усилешя ветра, винтовая характеристика примет вид В. Если бы нс было регулирующего устройства 2, то двигатель вышел бы и точку Г, ц его частота вращспя сталя бы равна и, которая мень. шс гг. Значение пардметра Р в этоц точке равно Р:, я соответствующая огра. цпфтельпс 4 характеристике предельцс допустимая частота вращения равна и,. Поскольку она меньше и то процесс будет протекать ацалоппшо вышеописанному, ц регулирующее устройство 2 выведет двигатель в точку К со значением параметра Рг( ц предельно допустимой частоты вращения 114. Таким образом, регулируощсс устройспо 2 независимо от условий плавания ц вцдг рсг 5 л 5 торцой хсргктс рцстцкц ЙУ обссисчцт точное равенство фактической частоты вращсшя двцгдтеля заданной,Пусть теперь в силу цекоторых причин, например уменьшения глубины, винтовая характеристика принимает вид Л. Если бы регулирующее устройство 2 было непосредственно соединено с датчиком 8, то оц вывел бы двигатель в точку Е, за ограничительную характеристику, что недопустимо, В точке 1, параметр Р равен Рг., а соответствующая предельно допустимая частота вращения двигателя п, больше, чем фактическая по (не рассматривая пока работу интегратора 15), поэтому через блок 14 станет проходить сигнал от блоков 11 и 12, равный пз, и больший сигнала датчика 8, т. е. на входе регулирующего устройства 2 сигнал переменной станет больше сигнала задания. Регулирующее устройство 2 станет вырабатывать корректирующее воздействие для уменьшения сигнала переменной, что приведет к уменьшению частоты вращения двигателя.Это уменьшение благодаря блоку 14 будет происходить до тех пор, пока двигатель не выйдет в точку М, В этой точке сигнал на выходе блоков 11 и 12 станет равным сигналу по от задатчика 1, и регулирующее устройство 2 прекратит (если не учитывать интегратор 15) корректировать режим двигателя. Но точка М лежит выше ограничительной характеристики, следовательно, работа в ней недопустима. Точный вывод двигателя на ограничительную характеристику осуществляет интегратор 15. В точке М сигнал на выходе блоков 11 и 12 равен па фактическая частота вращения двигателя меньше и равна ггг, т. е. знак их разности соответствует работе интегратора 15. Интегратор 15 вырабатывает сигнал на выходе блока 13 над сигналом фактической частоты вращения от датчика 8. На выходе интегратора 15 сигнал начнет увеличиваться и соответственно будет увеличиваться сигнал за сумматором 16, так что снова сигнал переменной частоты на выходе регулирующего устройства 2 станет больше сигнала от задатчика 1, равного п,. Регулирующее устройство 2 станет уменьшать режим работы двигателя. Это уменьшение будет происходить до тех пор, пока интегратор 15 не прекратит увеличивать свой выходной сигнал, т, е. пока сигнал от блоков 11 и 12 не станет равным сигналу от датчика 8. Указанное равенство сигналов может иметь место только при работе двигателя в точке Лг, точно на ограничительной характеристике,Выбор параметра, по которому осуществляется ограничение режима, осуществляется блоком 13.Система может реализовать вывод двигателя на ограничительную характеристику для любого пз нескольких разнородных параметров. 0 20 25 Зо 35 -го .15 50 Это достигается благодаря тому, что блоки нелинейностей 11 и 12, формирующие такие зависимости, встроены не в линии связи от датчика частоты вращения, а в выходные каналы датчиков 9 и 10 параметров нагрузки, и пх выходные сигналы приводятся (масштабируются) к значениям одного параметра - частоты вращения. Таким образом, блоки 11 и 12 нелинейностей, интегратор 15 и дополнительный блок 14 выбора большего необходимы для исключения выхода двигателя пз области допустимых режимов работы и решают одну ц ту же задачу - обеспечивают точное управление двигателем со статическим регулятором б в допустимой области режимов и не допускают выхода двигателя из этой области (в статике) во всех условиях плавания.Система может быть реализована на пневмоэлементах илп на элементах других типов, например электронных, плп комбинациях элементов разных типов. Формула изобретения Система управления судовым двигателем со статическим регулятором частоты вращения, содержащая задающий орган, регулирующее устройство, соединенное с задающим органом, датчиком частоты вращения и сумматором, подсоединенным в линию от задающего органа к исполнительному устройству, связанному с регулятором частоты вращения, датчиками параметров механической и тепловой нагрузки двигателя, соединенными с блоком выбора болыпего, и блок нелпнейцостей, о т л и ч аю щ а я с я тем, что, с целью одновременного повышения точности управлеггпя двигателем, обеспечения его автоматической защиты от перегрузки и повышения надежности при увеличении числа параметров контроля, она снабжена дополнительным блоком нелпнейностей, установленным между датчиками параметров и блоком выбора большего, дополнительным сумматором, дополнительным блоком выбора большего и интегратором, соединенными входами с блоком выбора большего и датчиком частоты вращения, а выходами - с дополнительным сумматором, соединенным с регулирующим устройством.Источники информации,принятые во внимание прп экспертизе 1. Авторское свидетельство СССР379452, кл. В 63 Н 21/22, 1973 (прототип),;оставитель В, Ищенк Техред В, Рыбакова едактор Г,;тор на русо ипография, пр. Сапуно Заказ 1020/18 Изд. Л"е 1871 ПО сПоиск Государственного комитета113035, Москва, Ж,Тираж 463ССР по делам изобретений ауьпская наб., д. 45 ь г ., 4 одписное открыл ий
СмотретьЗаявка
2600049, 04.04.1978
ПРЕДПРИЯТИЕ ПЯ Г-4372
ПУШИН ЮРИЙ НИКОЛАЕВИЧ, НОВАК ВИТОЛЬД ВИКТОРОВИЧ
МПК / Метки
МПК: B63H 21/22
Метки: вращения, двигателем, регулятором, статическим, судовым, частоты
Опубликовано: 07.07.1982
Код ссылки
<a href="https://patents.su/4-941240-sistema-upravleniya-sudovym-dvigatelem-so-staticheskim-regulyatorom-chastoty-vrashheniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления судовым двигателем со статическим регулятором частоты вращения</a>
Система для статической стабилизации частоты вращения бесконтактного двигателя постоянного тока

Номер патента: 681514
Опубликовано: 25.08.1979
МПК: H02K 29/02
Метки: бесконтактного, вращения, двигателя, постоянного, стабилизации, статической, частоты
...Выходы элементов 5 соединены со входами логического элемента И-ИЛИ-НЕ 10, выход которого подключен ко входу симметричного одновибратора 11, к каждому плечу которого присоединены интегрирующие цепо;ки 12, 13. Выходы интегрирующих цепочек соединены с прямым 14 и инвертирующим 15 входами дифференциального усилителя 16, выход которого соединен со входами логических элементов б.Схема работает следующим образом.При подаче напряжения питания двигатель приходит во вращение. В начальный момент на одном плече одновибратора 11 имеется логическая единица, а на другом плече - ноль. В процессе работы сигнал, пропорциональный частоте вращения БДПТ, и выделенный по перекрытию сигналов датчика положения .ротора через логический элемент 10 поступает на...
Устройство для двухзонного регулирования частоты вращения асинхронного двигателя с фазным ротором

Номер патента: 720651
Опубликовано: 05.03.1980
МПК: H02P 5/34
Метки: асинхронного, вращения, двигателя, двухзонного, ротором, фазным, частоты
...основная обмотка датчика скольжения, а к другому - выход автономногоисточника частоты.На чертеже представлена структурная схема предложенного устройства двухзонного регулирования частоты вращения.Устройство состоит из асинхронного двигателя 1 с фазным ротором, датчика скольжения 2 с двумя трехфазными обмотками, источника 3 питания, автономного источника 4 частоты, инвертора 5, бескойтактного переключающего устройства 6, нуль-органа зо 7, управляемого выпрямителя 8.Работает устройство следующим образом.При подходе ротора асинхронного двигателя 1 к зоне нечувствительности, что соответствует скольжению 3 - 5%, трехфазная дополнительная обмотка датчика скольжения 2 переключается с источника 3 питания асинхронного двигателя на...
Устройство для регулирования частоты вращения тяговых двигателей электроподвижного состава

Номер патента: 956326
Опубликовано: 07.09.1982
Авторы: Коган, Лисунов, Любимов
МПК: B60L 15/20
Метки: вращения, двигателей, состава, тяговых, частоты, электроподвижного
...работает следующим образом,При пуске задатчик 8 тока выдает задание суммарного якорного тока тяговых двигателей. В регуляторе 7 тока из задания вычитывается величина действительного суммарного якорного тока якорей двигателей, Так как в первый момент токи двигателей равны нулю, на вход регуляторов 9 скорости поступает полный сигнал задания. В регуляторе из сигнала задания вычитается сигнал обратной связи по скорости. Так как в первый момент скорость колеса равна нулю, весь сигнал поступает на вход тиристорного преобразователя 3. Тиристорный преобразователь, полностью открывшись, выдает максимальное напряжение на зажимы якоря двигателя 1. Это вызывает форсированное нарастание тока якоря. Сигналы с датчиков 4 токов поступают на...
Способ регулирования частоты вращения вентильного двигателя и устройство для его осуществления

Номер патента: 1679594
Опубликовано: 23.09.1991
Авторы: Высоцкий, Каретный, Коньков, Лютахин, Ольшанский
Метки: вентильного, вращения, двигателя, частоты
...который осуществляет перевод триггера 7 в положение логического нуля и на его выходе сигнал л становится равным нулю. За время прохождения инверсного импульса г в счетчик 10 импульсов зафиксируется число (М-К), где М - число импульсов длительностью 360/п эл,град. с дополнительного датчика 4 положения ротора за период 360/й эл.град.В момент прохождения прямого импульса в импульсы с датчика 4 положения ротора через второй формирователь 8 импульсов поступает на вход ("+1") прямого счета счетчика 10 импульсов. Последний начинает счет импульсов в прямом направлении. По мере отсчета счетчиком 10 числа (М - К) импульсов с датчика 4 положения ротора на его выходе (2 л) переноса прямого счета, где л - число разрядов счетчика 10, появляется...
Устройство измерения скорости вращения бесконтактного двигателя постоянного тока

Номер патента: 662867
Опубликовано: 15.05.1979
Автор: Суляев
МПК: G01P 3/46
Метки: бесконтактного, вращения, двигателя, постоянного, скорости
...через шесть формирователей 7 - :12подключены к схеме сборки 13, выход которой соединен с первым входом схемы совпадения 14, выход которой подключен к первому установочному входу триггера 15, Выход одного из чувствительных элементов, например первогочерез-последовательно соединенные инвертор 16 и седьмой формирователь 17 подключен к; входу генератораивторому установочному входу триггера 15.Выход генератора 18 соединен со вторымвходом схемы совпадения, а выход тригге-,ра 15 подключен к первому входу схемысложение по модулю два 19 непосредственно, а ко второму входу - через схему задержки импульсов на период несущей частоты 20.Устройство работает следующим образом,При вращении вала ДПР с его чувствительных элементов 1-:6 снимаются...
Предыдущий патент: Приводное устройство движителя для лодок
Следующий патент: Устройство для затаривания сыпучих материалов
Случайный патент: Система смазки двигателя внутреннего сгорания