Фазовая система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
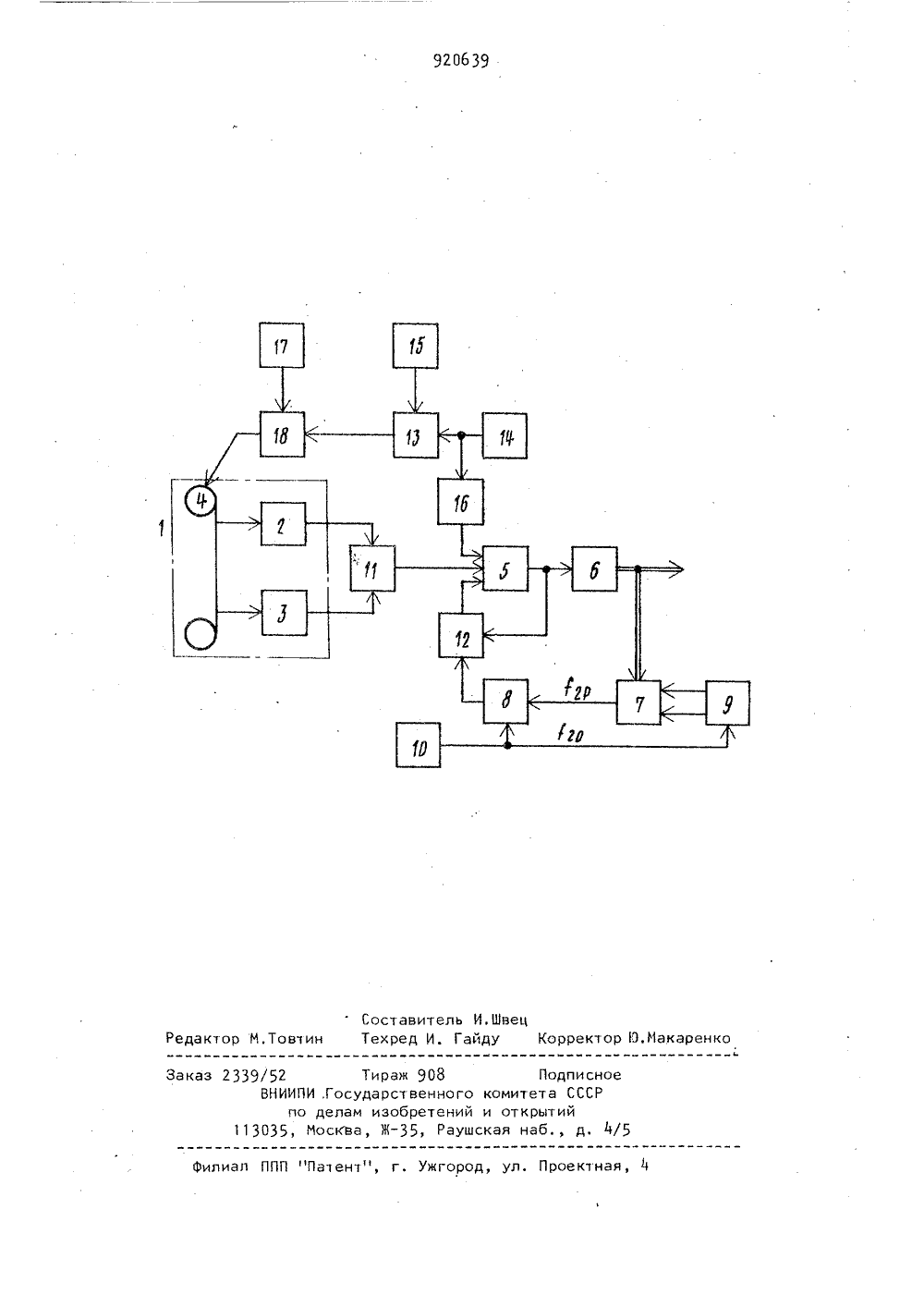
ие делам изебретекий и открытий(53) УДК 62-50355(088,8) Дата опубликования описания 15. 04. 82(71) Заявитель54) ФАЗОВАЯ СИСТЕМА ПРОГРАММНОГОУПРАВЛЕНИЯ то Изобретение относится к автоматике.По основному авт . св. И 643839 известна фазовая система программного управления, содержащая последовательно соединенные устройство ввода программы, основной Фазовый дискриминатор, сумматор, привод, вращающийся трансформатор, другие входы которого через фазорасщепитель подключены к выходу генератора напряжения, дополнительный Фазовый дискриминатор, первый вход которогЬ соединен с выходом вращающегося трансформатора, второй вход - с выходом генератора напряжения, а выход - с другим входом сумматора 13 .Однако зто устройство характеризуется недостаточной точностью, обусловленной ошибкой привода при отработке программы, а также статическим характером изменения величины регулируемого параметра в процессе работы (например, упругих деФормаций), и низкой производительностью, обусловленной невозможностьо оптимизации режима работы уст ройства.Целью изобретения является повышение точности фазовой системы прог.раммного управления.Цель достигается тем, что в устройство введены задатцик скорости, задат чик параметра, функциональный преобразователь, суммирующий усилитель и последовательно соединенные датчик параметра, дополнительный сумматор и усилитель ограничитель выходом соединенный с входом привода лентопротяжного механизма, а вторым входом - с выходом задатчика скорости, а выход задат чика параметра подключен ко второмувходу дополнительного сумматора, первый вход которого подключен к входу Функционального преобразователя, выход которого соединен с третьим входом основного сумматора, а вы 920639ход основного сумматора соединен спервым входом суммирующего усилиеля, второй вход которого подключенк выходу дополнительного фазовогодискриминатора, а выход суммирующего усилителя соединен со вторымвходом основного сумматора,На чертеже представлена структурная схема устройства.Фазовая система программногоуправления содержит блок 1 вводапрограммы, блок 2 воспроизведенияи усиления синусоидального рабочего сигнала, блок 3 воспроизведенияи усиления опорного сигнала, блок 4привода лентопротяжного механизма,основной сумматор 5, привод 6 станка, вращающийся трансформатор ,дополнительный фазовый дискриминатор 8,фазорасщепитель 9,генератор 10напряжения, основной фазовый дискриминатор 11, суммирующий усилитель 12,дополнительный сумматор 13, датчик14 параметра, эадатчик 15 параметра,Функциональный преобразователь 16,задатчик 1 скорости, усилитель-ограничитель 18,Фазовая система программного управления работает следующим образом.В режиме воспроизведения записанные на магнитной ленте сигналы,воспроизводятся и усиливаются блоками воспроизведения и усиления 2 ии сравниваются по фазе в основномФазовом дискриминаторе 11, которыйФормирует на выходе сигнал постоянного тока, пропорциональный Фазовому сдвигу между опорным и рабочимсигналами. Величина фазового рассогласования в данном случае будет пропорциональна заданному углу поворотавала привода 6 станка. Угол поворота привода 6 контролируется вращающимся трансформатором 7, работающимв режиме фазовращателя. При этомФаза выходного напряжения трансформатора 7 по отношению к напряжениюпитания, поступающего от генератора 10 и выполняющего роль опорногонапряжения, будет пропорциональнауглу поворота вала привода, Синусоидальные сигналы с частотой го исравниваются по фазе в дополнительном фазовом дискриминаторе 8, свыхода которого напряжение. пропорциональное действительному углу поворота вала привода 6 сравниваетсяв суммирующем усилителе 12 с сигналом, снимаемым с выхода основного сумматора 5,и результирующий сигнал суммируется в основном сумматоре 5 с совпадающим по фазе сигналом, поступающим с выхода основного фазового дискриминатора 11. Таким образом, через суммирующий усилитель 12 осуществляется обратная связь по раз,ности сигналов на входе системы регулирования и от датчика обратной 10 связи (дополнительный фазовый дискриминатор 8), выходной координатыпривода 6. Повышение точности и производительности фазовой системы программного управления, например при 15 Фрезеровании, достигается также путем оптимизации режима резания и компенсаций упругих деформаций системыСПИД (станок-приспособление-инструмент-деталь), Для этого используетсяинформация о каком-либо параметре,характеризующем режим резания, например величине упругих деформацийсистемы СПИД. Измерение осуществляется датчиком параметра 14. Сигнал д 5 с датчика параметра 14 через Функциональный преобразователь 16, обеспечивающий требуемое усиление ипреобразование сигнала, подается наосновной сумматор 5 в фазе с сигналом программы (с выхода фазовогодискриминатора 11), При этом режущий инструмент смещается по отношению к обрабатываемой детали на величийу, равную упругим деформациям 35системы СПИД и направленную в противоположную сторону, В результатетакого регулирования размер деталиполучается равный заданному рабочему настроечному размеру, который устанавливаетсяя перед началом обработ. -ки беэ учета упругих деформаций, Кроме компенсации упругих деформацийсистемы СПИД предлагаемое устройство обеспечивает автоматическое 45регулирование заданного параметраили заданной скорости обработки,Для этого сигнал с датчика параметра сравнивают в дополнительном сумматоре 13 с сигналом, пропорциональным предельному значению параметра, 50устанавливаемому задатчиком параметра 15 из условия прочности кинемати ческой цепи или других соображений.Разность этих сигналов усиливают вусилителе 18 с регулируемым уровнемограничения и подают на вход привода 4 лентопротяжного механизма.Уровень ограничения усилителя-ограничителя 18 определяется величиной5 92 сигнала, поступающего на его второйвход с задатцика скорости 17.увеличением сигнала с задатцика скорости уровень ограничения усилителя-ограничителя 18 увеличивается С помощью задатчика скорости 17 задается максимальный уровень скорости, определяемый из технологических или других соображений. При этом процесс обработки, например фрезерования, протекает следующим образом. Подвод инструмента к детали и врезание осуществляется с наиболь-, шей подачей, Скосроть движения прог. раммоносителя определяется при этом установкой задат чика 17 скорости, а усилитель-ограничитель 18 работает в зоне насыщения, уровень которой определяется этой установкой. С момента врезания производится измерение параметра (упругой деформации системы СПИД), Если его величина не превышает предельное заданное задатчиком параметра значение, то усилитель-ограничитель 18 продолжает работать в зоне насыщения и обработка происходит с максимальной подачей. Если величина параметра превысит заданное предельное значение, то сигнал на выходе сумматора 13 уменьшается, усилитель 18 выходит из,насыщения и начинает работать в линейном режиме усиления. При этом сигнал на его выходе, а следовафтельно скорость программоносителя и скорость продольной подачи, будет определяться разностью заданного и фактического значений параметра (уменьшается с увеличением измеряемого параметра и увеличивается с его уменьшением), Таким образом обеспечиваются один из двух режимов; стабилизация предельной скорости обработки или стабилизация предельного значения параметра. 0639Такое управление процессом резания с одновременной компенсацией упругих деформаций системы СПИД обеспецивает точность обработки, по вышение производительности, улучшает использование возможностей оборудования станка и инструмента) и снижает расходы по программированию.1 ОФормула изобретенияФазовая система программного управления по авт.св. Н 6113 839,о т л и - 15 ч а ю щ а я с я тем, что, с цельюповышения точности системы, в неевведены задатчик скорости, задатчикпараметра, функциональный преобразователь, суммирующий усилитель и 20 последовательно соединенные датчикпараметра, дополнительный сумматори усилитель-ограничитель, выходомсоединенный с входом привода лентопротяжного механизма, а вторым вхо дом - с вЫходом задат Цика скоРости,выход задатчика параметра подключенк второму входу дополнительного сумматора, первый вход которого подключен к входу функционального преоб- ЗО разователя, выход которого соединенс третьим входом основного сумматора, а выход основного сумматора соединен с первым входом суммирующегоусилителя, второй вход которого под.ключен к выходу дополнительного фазового дискриминатора, а выход суммирующего усилителя соединен с вторым входом основного сумматора.Источники информации, принятые во внимание при экспертизе1. Авторское свидетельство СССР6 Й 3839 кл, 6 05 В 19/18,1979 прототип).920639 Составитель И,ШвецТехред И. Гайду Коррек Э,Макаренко Редактор М,Товти дч/5 илиал ППП "Патент", г. Ужгород, ул. Проектная,Заказ 2339/52 Тираж 908 ВНИИПИ,Государственного по делам изобретений 113035, Москва, Ж, РаушПодписнокомитета СССРи открытийкая наб.,
СмотретьЗаявка
2920811, 05.05.1980
КОМСОМОЛЬСКИЙ-НА-АМУРЕ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ИОНОВ АНАТОЛИЙ НИКОЛАЕВИЧ, ГОРЯЧЕВ ВЛАДИМИР ФЕДОРОВИЧ, ИОНОВА ГАЛИНА ПЕТРОВНА
МПК / Метки
МПК: G05B 19/18
Метки: программного, фазовая
Опубликовано: 15.04.1982
Код ссылки
<a href="https://patents.su/4-920639-fazovaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Фазовая система программного управления</a>
Устройство для включения резервного усилителя следящих приводов

Номер патента: 471586
Опубликовано: 25.05.1975
МПК: G06F 11/00
Метки: включения, приводов, резервного, следящих, усилителя
...устройство следующим образом.При появлении ошибки, превышающей допустимую (определяемую напряжением смещения транзистора 1) транзистор 1 закрываетсяи на входе элемента задержки появляется напряжение,Если неисправность привода такоходной вал привода не вращается, тчении заданной выдержки временивает реле 11 и включает резервныйотключая неисправный рабочий.При этом привод, если неисправность вызвана выходом из строя усилителя, будет нормально работать с резервным усилителем,Если ошибка превышает допустимую, новыходной вал привода разгоняется в нужнуюсторону, то на вход транзистора 2 подаетсяконтрольное напряжение такой фазы, что отЗаказ 2022/13ЦНИ Изд.727 И Государственного к по делам изобр Москва, Ж, РТираж 679митета Совета...
Устройство для включения резерв-ного усилителя следящего привода

Номер патента: 840911
Опубликовано: 23.06.1981
Авторы: Прокофьев, Селиванов, Семенов, Чуприн
МПК: G06F 11/00
Метки: включения, привода, резерв-ного, следящего, усилителя
...привода не вращается,то по истечении заданной выдержки времени, определяемой приблизительнотремя постоянными времени фильтра, сра -батывает реле 11 и включает резервныйусилитель отключая неисправный. Приэтом привод, если неисправность вызвана выходом из строя усилителя, нормально работает с резервным усилителем,Если ошибка превышает допустимую,но выходной вал привода разгоняетсяв нужную сторону, то на вход транзистора 2 подается контактное напряжение.1такой фазы, что открывает его в тотполупериод, когда транзистор 1 закрытсигналом ошибки. В результате сигнална вход 1 С -фильтра не поступает иреле не срабатывает,Если при превышении ошибки выходной вал привода разгоняется произвольно, а не в сторону, определяемую знаком ошибки, то Фаза...
Устройство для управления скоростью электромагнитной муфты скольжения привода горной машины

Номер патента: 1190028
Опубликовано: 07.11.1985
Авторы: Дубинин, Кривущенко, Мальцев, Пурис
МПК: E21C 35/24, H02P 15/00
Метки: горной, муфты, привода, скольжения, скоростью, электромагнитной
...первого 14 и второго 15 ключей и входампервого 5 и второго 8 одновибраторов, выходы которых соответственно подключены к входам сброса первого 11 и второго12 интеграторов.Элемент 3 сравнения, одновибраторы5 и 8, интеграторы 11 и 12, инвертируюший элемент 13 выполнены на операционных усилителях, а амплитудный селектор10 - на диодах. Регулятор 4 тока представляет собой тиристорный управляемый выпрямитель со схемой управления и тиристорами, Ключи 14 и 15 представляют собойуправляемые аналоговые ключи.На фиг. 3 представлены графики, поясняющие работу устройства, где обозначенынапряжения на выходах: .1, - тахогенератора 7;пэ - порогового элемента 6;1. из - и нвертируюшего элемента 13; 1.)ов,1)оь 8 - одновибраторов 5 и 8; Ы1 д - интеграторов...
Усилитель тормозного привода

Номер патента: 369754
Опубликовано: 01.01.1973
Автор: Иностранец
МПК: F15B 9/12
Метки: привода, тормозного, усилитель
...входит конец входного штока 32, распорцая втулка 33 и фильтр 34. Головку 23 плотно охватывает внутренний утолщенный борт диафрагмы 5. Кольцевой эластичньш клапанный элемент 35 имеет уплотцяющую центральную часть 36, установленную на выходном штоке 37, Периферийная часть элемента 35 опирается на обойму 17 и противоположные ее отбортовке поверхности концов 15 рычагов 11. На штоке 37 установлен также тарельчатый опорный диск 38, выпуклая поверхность 39 которого взаимодействует с пластиной 9, прикимаясь к ней пружиной 40. Управляющий элемент 20 имеет каналы 41, 42, 43 для прохода гоздуха. Торцовая стенка половины 2 корпуса снабяена уплотнением 44, сквозь которое проходит шток 37. Пружина 40 нормально удерживает шток 37 вдвинутым в корпус,...
Устройство для измерения жесткости подшипника качения

Номер патента: 1134896
Опубликовано: 15.01.1985
Авторы: Миронович, Михайлов, Чаадаева, Явленский
МПК: G01M 13/04
Метки: жесткости, качения, подшипника
...датчики с короткозамкнутыми обмотками роторов. Это позволяетотказаться от токоподводов к оправке 16 и уменьшить ее .вредный МСВ, который приводит к увеличению погреш"ности измерения МСВ исследуемого 30;усилителя 22 используется стандартный усилитель следящего привода, в%качестве индикатора момента - ампер"метр, тарированный в единицах мо мента. Электромеханический привод 20имеет значительную инерционность ииспользуется для создания отиоситель.ного движения колец подшипника спостоянной скоростью, Для задания 40 колебательного движения колец подшип.ника качения,3 по сигналу с первоговыхода программного блока 24 генератор крутильных колебаний 25, в качестве которого используется стандарт ный генератор звуковой частоты, подает на второй...
Предыдущий патент: Система управления нагружением конструкций
Следующий патент: Устройство для программного управления
Случайный патент: Устройство для изготовления волноводов