Бинарная система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
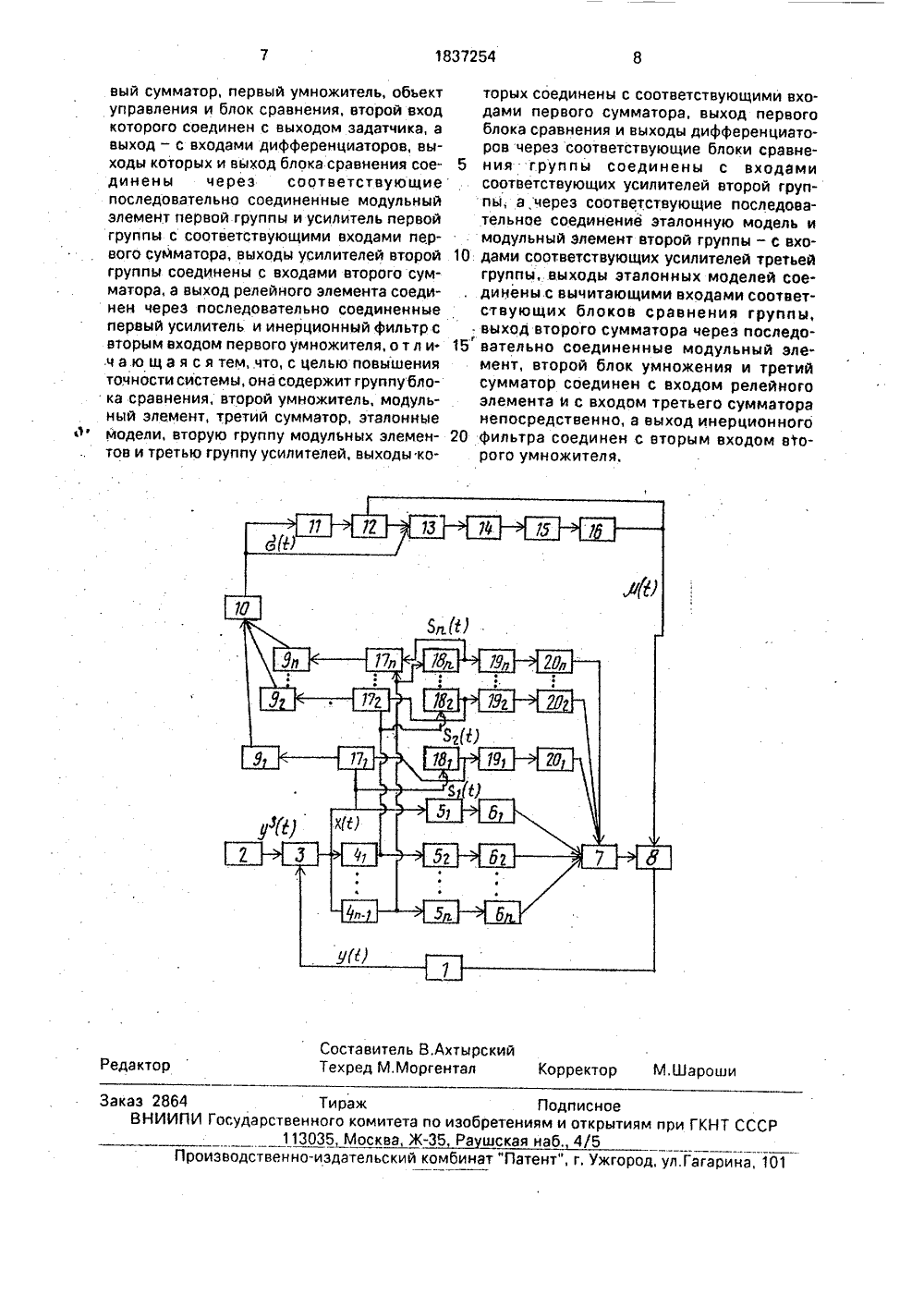
.1 ил. 1 1 1 ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕВЕДОМСТВО СССРГОСПАТЕНТ СССР) ОПИСАНИЕ И(46) 30.08,93, Бюл. М 321(71) Всесоюзный научно-исследовательскийинститут системных исследований АН СССР 1(72) В,Н. Ахтырский, С,В. Емельянов, С,К. Ко, ровин, В.И. Сизиков и К,М. Цветкова (56) Авторское свидетельство СССР : :М 1126927, кл. 6 05 В 13/02, 1984, , (54) БИНАРНАЯ. СИСТЕМА УПРАВЛЕНИЯ , (57) Изобретение относится к области авто, матического регулирования и управления и : ;выполнено в рамках бинарных систем. Изобретение относится к области авто, ,матического управления и предназначено: ;для управления неопределенными динами, ческими объектами, описываемыми уравне нием следующего видау"(1)+ап(1)у" "(1)а 1(1)у(1)=О(т). (ЦСчитается, что параметры а(1) (1=1,п) ме. ,няются неконтролируемым образом в изве стных диапазонаха 1а;(1)а,, к нулю ошибки регулирования х(1)=у(т)-угде у- задающее воздействие, т.е. выполнение выражения 3 п,х(1)=О, аС вой,также обеспечение малои зависимости ди: намики управляемых процессов от изменя; ющихся параметров объекта и требуемогокачества переходных процессов.Близкой к предлагаемому решению поставленной задачи является система управ ,ления с координатно-параметрическойобратной связью, содержащая последовательно соединенные первый сумматор, умПредлагаемая назначена для р ными динамиче для обеспечени мики управляем щихся парам обеспечения тр ных процессов. шение точности что система доп пу блоков сравн ментов, суммат модели система управления предегулирования неопределенскими объектами, а также я малой зависимости динаых процессов от изменяюетров объекта и для ебуемого качества переход- Цель изобретения - повысистемы - достигается тем, олнительно содержит груп- ения, группу модульных элеор, умножитель, эталонные ножитель, первый блок сравнения, объект управления и второй блок сравнения; второй вход которого соединен с выходамзадатчика, а выход - со . вхадами дифференциаторов, выходы которых и вы-ход первого блока сравнения соединены че-" рез соответствующие первые усилители со входами второго сумматора и со входами вторых усилителей, выходы которых соединены с соответствующими входами первого сумматора, выход второго сумматора соединен со входом релейного элемента, к вы- О ходу которого подключен инерционный ( фильтр, выходом подключенный ко второму входу умножителя. К недостаткам описан- с ной схемы следует отнести отсутствие тре- (буемого качества регулирования на начальной фазе переходного процесса и значительные энергетические затраты на управление на этом этапе.С целью повышения точности и качества работы регулятора в систему управления, содержащую последовательно соединенные: первый умножитель, объект управле 18372545 10 15 20 25 30 35 45 50 55 ния, первый блок сравнения, второй вход которого соединен с выходом задатчика, а выход - со входами дифференциаторов, выходы которых и выход блока сравнения через последовательно соединенные модульный элемент первой группы и усилитель первой группы соединены со входом первого сумматора, введены эталонные модели, выходы которых через последовательно соединенные блоки сравнения второй группы, вторым входом которых служат выходы дифференциаторов и первого блока сравнения, и усилители второй группы соединены со входом второго сумматора, а также через последовательно соединенные модульные элементы третьей группы и усилители четвертой группы - со входом первого сумматора: второй модульный элемент, подключенный своим входом к выходу второго сумматора, а выходом - ко входу второго умножителя, последовательно соединенного с третьим сумматором, второй вход которого подключен к выходу второго сумматора, а выход - ка входу релейноо элемента, последовательно соединенного через третий усилитель со входом инерционного фильтра, выход которого соединен со вторыми входами первого и второго умножителей,На чертеже представлена схема системы автоматического управления, реализующая предлагаемый подход и являющаяся предметом настоящего изобретения. На чертеже приняты следующие обозначения: 1 - обьект управления; 2 - задатчик; 3 - первый блок сравнения; 44 п-т - дифференциаторы соответствующего порядка;515 п - модульные элементы первой группы; 6.бп - усилители первой группы; 7 - первый сумматор; 8 - первый умножитель;99 п - усилители второй группы; 10 - второй сумматор; 11 - второй модульный элемент; 12 - второй умножитель; 13 - третий сумматор; 14 - релейный элемент; 15 - третий усилитель; 16 - инерционный фильтр;1717 п - блоки сравнения второй группы;1818 п - эталонные модели, реализующие сигналы Я(т)5 п(т); 1919 п - модульные элементы третьей группы;201,. ,20 п - усилители четвертой группы.Изобретение выполнено в рамках методологической конструкции, изложенной в 1). Получение дополнительного качества переходных процессов возможно в предлагаемой системе вследствие введения в схему функциональных блоков 18,.,18 п, выходом которых являются сигналы к)1(С),5 п(1), ИГраЮЩИЕ РОЛЬ ЭтаЛОННЫХ СИГ- налов для управляемых процессов х(т),.,хп(т), Эталонные траектории Я(т)=(5(т)5 п(т могут быть наделены на этапе синтеза системы требуемыми свойствами, например, желаемым показателем экспоненциальной устойчивости (тм, т.е,11(т) 1115(то) 11 ехр(д 1-ь) для всехт то, (2) где 11 11 - знак октаэдрической нормы в И", Реализация эталонной модели со свойством вида (2) возможно, если, например, в функциональных блоках 181,18, присутствуют дифференцирующие звенья, охваченные отрицательной обратной связью с коэффициентом передачи о м. Кроме указанных свойств в блоках 1818 п происходит согласование начальных условий на эталонной модели и обьекте управления при включении системы регулирования. Та кое согласование может быть реализовано с помощью устройства, отвечающего следующей совокупности соотношений;Ят)=Ам(т)Я 1);Я(т)ч 7 (т) Я(т)+(1- Ч (тх(т);т 7(т)= зяп(1- 1 Ф)1)р =) с)(х-Я) ) ( ) д Я ( Я г ) хБ) ) - ,=1 =1где Рм 6 К - матрица эталонной модели; дс (1=1,п) - указаны далее. Приведенный алгоритм обеспечивает при включении соотношение 11 х(то)-Я(то) 11 пд и, выбрав соответствующим образом параметр д всегда гарантируется требуемая близость начальных условий на объекте и эталонной модели,Еще одной важной особенностью предлагаемой системы является то, что функциональные блоки 18118 п в процессе работы легко могут быть перенастроены на новые динамические свойства без перена 40 стройки всей системы. Остальные контуры предлагаемой системы построены так, чтобы обеспечить асимптотическое стремление управляемых процессовх(т) к эталонным траекториям 5(1) или выполнению равенства 1 и 11 х(т)3(1) 11=-0,где х(т)=(х(т)х (1 ЯКПредложенный регулятор описываетсяследующими соотношениямиО(с)= р Я (К" х((К)ЯС),=1 где (.)(т) и р(т) - выходные сигналы первого умножителя 8 и инерционного фильтра 16, соответственно; а К", К, с(=1 и) и а - коэффициенты усиления, реализуемые на уси 1837254ли ельных блоках 61,. 6 П, 201,20 п, 919 п и 5, Как видно из приведенных соотношен й, функция управления остается все врем гладкой, а коэффициенты усиления - к нечными, выбираемыми из следующих 5 с отношений: (с)- д)К)"вар(с)+д)а)(т); (с,- д)КЬ(с)+д)д,; д адептах с)+ д)п 1 ах (К)", К1; 1=1,п,1=1,п 10 г е д - некоторая константа, удовлетворяю ая неравенству 0дв 3 п (с, 1)1=1,п, П кажем, что рассматриваемый регулятор р шает поставленную задачу управления, 15 П еобразуем исходный объект управления (1 к матричному видух(т)=А(с)х(т)+ О(1), г е элементами последней строки матрицы А ) 68 являются параметры а(1),=1,п. 20 Р ссмотрим также дифференциальное у авнение относительно новой переменной я т)=х(т)-Б(т). я ЮВ";е (т)=А(с) е (т)+( А(т)-Ам 1 Я(т)+0(1) (3) г е А)4 6 И - постоянная матрица урав н ния Я(т)=АпЯт), отвечающего условию (2). Введя в рассмотрение еще одну переП мнную о= с) г 1 можно преобразовать )=130 (3 к виду е (т)=А е(с)+ А -Аме 13(т)+Н о;и Оаз днм До(т)=А: к (т)+(А -А . Я(т)+Н гт+ в)гт), )4)где е = (е 1 х,п) и параметры (4) нек торым образом связаны с (3). Известно, ч о соответствующим выбором с), 1=1,п сист му Я=А. (т) в можно сделать асимптот чески устойчивой. Кроме того, функция 40 у равления 0(т), реализуемая описанным в ше регулятором обеспечивает справедл вость выраженияод ( я +3).Таким образом, можно сделать вывод о 45 т м, что траектории эсимптотически устойч вы и справедлива оценка из (2)хПхоехр(-д (ко, тто (5) показатель -д0 определяется параметр ми д, с)(=1,п) и д зд, причем соответст- О в ющим д м можно добиться требуемого хррактера переходногО процесса, при этом в системе требуется перенастроить лищьоки 18118)1 не сменяя контуров управлрния, Оценка 5) доказывает, нто предлоЙенная система автоматического управления решает поставленную задачу.Предлагаемая система функционирует гБфедующим образом. Сигнал у(1) поступает с выхода задатчика 2 и сравнивается с сигналом у - выходом объекта управления 1 в блоке сравнения 3, Полученный сигнал ошибки х(т) поступает нэ вход первого усилителя 6 через модульный элемент 51 и через дифференциаторы соответствующего порядка 41,4)-1 на входы усилителей первой группы 626 п через модульные элементы первой группы 525 п, Сигналы с выходов эталонных моделей 181,18 П поступают на входы модульных элементов третьей группы 19119, и усилителей четвертой группы 201,.,20 п, а также сравниваются в блоках сравнения второй группы 17117 п с сигналами с выходов блока сравнения 3 и дифференциаторов. Результаты сравнения через вторые усилители поступают во второй блок суммирования 10, который формирует сигнал координатно-параметрической обратной связи о(т) как линейную комбинацию разности х(т) и его производных с эталонными сигналами Я 2Яп(1), С выхода блока 10 сигнал о(т) подается на вход второго модульного элемента 11, последовательно соединенного со вторым умножителем 12, а также на вход третьего сумматора 13, на вход которого подается сигнал со второго умножителя 12. Сигнал с третьего сумматора 13 через релейный элемент 14 и третий усилитель 15 подается в инерционный фильтр 16, выход которого - сигнал р(т) поступает на входы первого 8 и второго 12 умножителей. На второй вход первого умножителя 8 поступает сигнал с первого сумматора 7, на который, в свою очередь, подаются сигналы с выходов усилителей первой 616 П и четвертой 20120 п групп. Выходом первого умножителя является сигнал управления Щт), который поступает на вход объекта управления 1, Таким образом, блоки 2,3.,51,5 п, 61,.,6 п, 7, 8, 1 9119 п;20120 п составляют контур координатной обратной связи, координатно-параметрическая обратная связь включает блоки 171. ".17 п, 919 п; 10, 11. 12; 13: 14: 15: 16,Технико-зкономический эффект и редлагаемой системы автоматического управления заключается в том. что она обеспечивает экономию энергетических затрат на управление на этапе переходных процессов, атакжедает возможность создания унифицированных регуляторов, обеспечивающих управление в широком диапазоне требований к качеству уп равляемых процессов,Формула изобретения Бинарная система управления, содержащая последовательно соединенные пер,Варош Заказ 2864 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035 Москва ЖРаушскав наб, 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 10 вый сумматор, первый умножитель, обьект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход блока сравнения соединены через соответствующие последовательно соединенные модульный элемент первой группы и усилитель первой группы с соответствующими входами первого сумматора, выходы усилителей второй группы соединены с входами второго сумматора, а выход релейного элемента соединен через последовательно соединенные первый усилитель и инерционный фильтр с вторым входом первого умножителя, о т л и..ч а ю щ а я с я тем, что, с целью повышения точности системы, она содержит группу блока сравнения, второй умножитель, модульный элемент, третий сумматор, эталонные д модели, вторую группу модульных элементов и третью группу усилителей, выходы которых соединены с соответствующими входами первого сумматора, выход первого блока сравнения и выходы дифференциаторов через соответствующие блоки сравне ния группы соединены с входамисоответствующих усилителей второй группы, а через соответствующие последовательное соединение эталонную модель и модульный элемент второй группы - с вхо. дами соответствующих усилителей третьейгруппы, выходы эталонных моделей соединены.с вычитающими входами соответствующих блоков сравнения группы, выход второго сумматора через носледо вательно соединенные модульный элемент, второй блок умножения и третий сумматор соединен с входом релейного элемента и с входом третьего сумматора непосредственно, а выход инерционного 20 фильтра соединен с вторым входом второго умножителя.
СмотретьЗаявка
4617072, 09.11.1988
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ СИСТЕМНЫХ ИССЛЕДОВАНИЙ АН СССР
АХТЫРСКИЙ ВЛАДИМИР НИКОЛАЕВИЧ, ЕМЕЛЬЯНОВ СТАНИСЛАВ ВАСИЛЬЕВИЧ, КОРОВИН СЕРГЕЙ КОНСТАНТИНОВИЧ, СИЗИКОВ ВЛАДИМИР ИВАНОВИЧ, ЦВЕТКОВА КЛАРА МАТВЕЕВНА
МПК / Метки
МПК: G05B 13/00
Метки: бинарная
Опубликовано: 30.08.1993
Код ссылки
<a href="https://patents.su/4-1837254-binarnaya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Бинарная система управления</a>
Цифровой демодулятор сигналов фазоразностной модуляции первого и второго порядка

Номер патента: 1838884
Опубликовано: 30.08.1993
Авторы: Горляковский, Крутов, Тримайлов
МПК: H04L 27/22
Метки: второго, демодулятор, модуляции, первого, порядка, сигналов, фазоразностной, цифровой
...6 и фазоцифровой дискриминатор 7,Текущие значения фазы сигнала с выхода фазоцифрового преобразователя 3 поступают на одни входы первого и второго компенсирующего сумматора 8 и 12, На другие входы компенсирующего сумматора 8 и входы умножителя 11 на два поступает корректирующий код, вырабатываемый в кольце фазовой автоподстройки, С выхода умножителя 11 на два удвоенная величина корректирующего кода поступает на сооответствующие входы второго компенсирующего сумматора 12.Такое подключение сумматоров 8 и 12 к выходам усреднителя 6 приводит к тому, что значение корректирующего кода, суммирующееся с текущим значением фазы сигнала во втором компенсирующем сумматоре 12, будет в два раза больше, чем значение корректирующего кода,...
Способ моделирования врожденного порока развития первой и второй жаберных дуг

Номер патента: 1161527
Опубликовано: 15.06.1985
Авторы: Котов, Чеботарь, Ярчук
МПК: G09B 23/28
Метки: врожденного, второй, дуг, жаберных, моделирования, первой, порока, развития
...развития первой и второй жаберных дуг путем введения в организм самки животного45 в период беременности фармакологических препаратов, в качестве фармакологического препарата используют хлоридин, который внутрижелудочно вводят самке крысы из расчета50 40-60 мг/кг веса на 12-14 день беременности.Способ моделирования осуществляют следующим образом.55 Способ моделирования врожденногопорока развития первой и второйжаберных дуг осуществлен на беспородных белых крысах. Согласно предлагаемому способу крысам на 12-14 день беременности вводили в желудок с помощью зонда хлоридин из расчета 40-60 мг/кг веса. На 20 сутки беременности после выведения из опыта получают эмбрионы. Для сравнения имели контрольную группу самок, от которых получены...
Устройство для оценки отношения корреляционных моментов второго и первого порядков

Номер патента: 1244678
Опубликовано: 15.07.1986
МПК: G06G 7/19
Метки: второго, корреляционных, моментов, отношения, оценки, первого, порядков
...процессов х.) и у1 с 1 1,К - -Т1с 1 ь 1 ь- ЮОгде р - ноРмиРованная взаимокор.реляционная функция процессов.Целью изобретения является повышение точности устройства,Параметр К является самостоятельной характеристикой форм взаимокорреляционной функции р) . Кроме того,если у с) . -) и ) х с - и) йи, т . е . ее.оляется выходом линейного звена с импульсной характеристикой Ь(о), топодставляя, производя замену перемен.ных, можно показать, чтоМг Ь) Мо(Ь) Мг(х)К = +ЖМ,(Ь) ЙО) М,(х)где М (Ь) = и"Ь(ц)йгг, - моменты имипульсной характеристики;1;:М(х) =1К (т)ДФ - момент корре)оляционной функции Квходного проацесса х,Таким образом, имеется воэможностьоценивать параметр линейного звена,что весьма важно при диагностике, ресурсных испытаниях,...
Способ уравновешивания сил и моментов инерции первого и второго порядков в двухтактных двенадцатицилиндровых двигателях внутреннего горения

Номер патента: 58578
Опубликовано: 01.01.1940
Автор: Ярин
МПК: F16F 15/24
Метки: внутреннего, второго, горения, двенадцатицилиндровых, двигателях, двухтактных, инерции, моментов, первого, порядков, сил, уравновешивания
...параллельных рядов цилиндров двенадцатицилиндрового двухтактного двигателя внутреннего горения установлены параллельно, а колена расположены под углами 60 друг к другу и в таком порядке, при котором моменты инерции первого порядка полностью уравновешиваются (фиг. 1).Оба вала синхронно вращаются в одну и ту же сторону, причем один вал должен опережать другой с относительным сдвигом фаз вращения на 90Прп этом двигатель будет полностью уравновешен включительно до сил и моментов инерции второго порядка.В самом деле, величина момента второго порядка поступательно движущихся частей, связанных с любым коленчатым валом по Зассу може быть построена так, как показано на схеме фиг. 2.Здесь ОА - некоторый вектор, вращающийся в плоскости вращения...
Способ уравновешивания сил и моментов инерции первого и второго порядка в двухтактных двигателях внутреннего горения

Номер патента: 59024
Опубликовано: 01.01.1941
Автор: Ярин
МПК: F16C 3/20, F16F 15/24
Метки: внутреннего, второго, горения, двигателях, двухтактных, инерции, моментов, первого, порядка, сил, уравновешивания
...двигателям с числом цилин-дров в каждом ряду более шести., В каждом ряду цилиндров с числом их, равным 6+ 4 п, где п - любое положительное целое число, отличное от нуля, коленчатый вал можно выполнить состоящим по длине из двух имеющих равные углы между коленами одинаковых участков, повернутых один относительно другого на 180(например, десятиколенчатый вал с порядком колен 1, 1 Х, 11, Ч 1, Ч, Ч 1, Ч, Ч 11, 11, Х). При применении такого вала в однорядном двигателе могут остаться неуравновешенными только моменты второго порядка потому, что инерционные силы уравновешиваются в пределах каждой половины вала, а моменты центробежных сил и сил первого порядка в пределах всего вала, так как одна половина вала повернута на 180 относительной...
Предыдущий патент: Устройство управления пьезодвигателем
Следующий патент: Бинарная система оптимальной стабилизации
Случайный патент: Вариатор