Адаптивная система управления параллельно работающими дизельными установками
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1252754
Авторы: Абубакиров, Васяков, Защелкин, Лобанов, Ложенков, Мурадов, Непомнящий, Уланов, Шмакин, Шубладзе
Текст
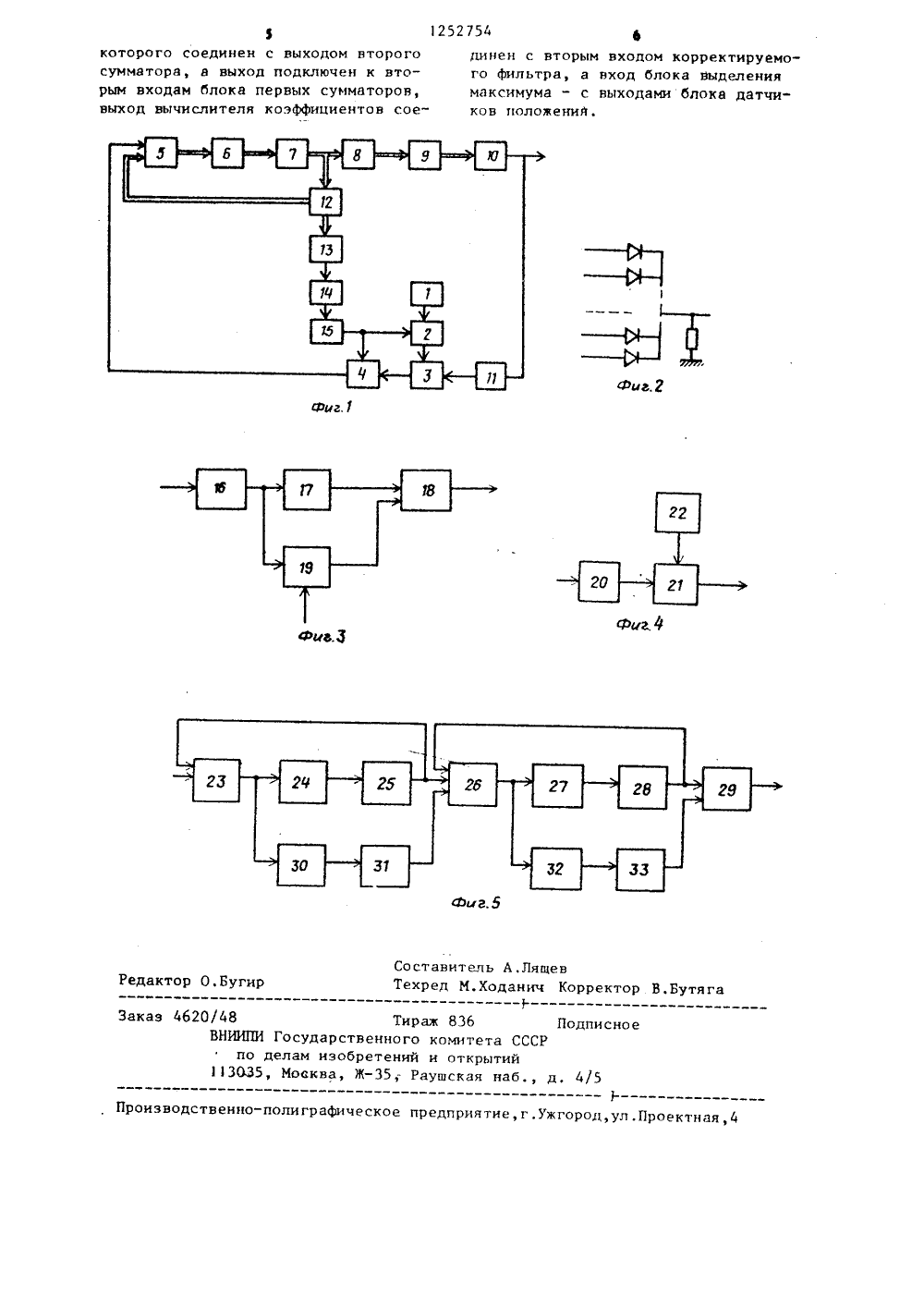
(57) Изотике. Целкачества втом етение относ ся ение увеи топ- печий цепов изобретения влени эконо процессов упр оторесурсов и чение лив.ли, состоит в том, чтдержит последовательнблок выделения максиму истема сосоединенны инерционоэффициентов второй вход дом второго ючен к втосумматоров, циентов соеное звено, вычислитель и адаптивный регулятор которого соединен с вы сумматора, рым входам од по первы блокслитеторыма,ав ход вычи я ко ходо орректи а выдед блока д динен о фил уемобло ами и максимума - с вь ков положения. У атчит найтройс во мож а буро т неск окое применение раллепьно работах установок. 5 де п дизельны УДАРСТВЕННЫЙ КОМИТЕТ СССРДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Ордена Ленина институт проблем управления автоматики и телемеханики, Московский институт нефтехимической и газовой промышленности им. И.М.Губкина и Производственное объединение по бурению Туркменсевбургаз"(56) Крутов В.И. Автоматическое регулирование двигателей внутреннего сгорания. -М.:Машиностроение, 1968, с.354.Алексеевский Г.В. Буровые установки Уралмашзавода. - М.:Недра, 1971, с.10-20. ТИВНАЯ СИСТЕМА УПРАВЛЕННО РАБОТАОЦИМИ ДИЗЕЛЬНЫМИ Отличие устройства, обего достижение поставленн40 45 50 55 Изобретение относится к автоматике и телемеханики и может быть испопьэовано, например, на буровых,Цель изобретения - повышение качества процессов управления, увеличение моторесурсов и экономия топлива.На фиг,1 представлена структурная схема предлагаемой адаптивной системы управления параллельно работающими дизельными установками; на фиг,2 схема реализации блока выделения максимума; на фиг.3 - схема реализации адаптивного регулятора; на фиг,4 схема реализации вычислителя коэффициента; на фиг.5 - схема реализациии корректируемого фильтра.Система содержит последовательно соединенные эадатчик 1 оборотов, корректируемый фильтр 2, сумматор Э, адаптивный регулятор 4, блок 5 сумматоров, блок 6 регуляторов, блок 7 исполнительных механизмов (с ручным и автоматическим управлением), блок 8 дизелей, блок 9 муфт сцепления, редуктор 10 и датчик 11 оборотов, выход которого соединен с вторым входом сумматора 3, последовательно соединенные блок 12 датчиков положения, блок 1 Э выделения максимума, инерционное звено 14 и вычислитель 15 коэффициентов, причем его выход подсоединен к входам адаптивного регулятора 4 и входу корректируемого фильтра 2, а входы и выходы блока датчиков 12 положения подключены соответственно к выходам блока 7 исполнительных механизмов и вторым входам блока 5 сумматоров,Блок 13 выделения максимума содержит параллельно соединенные по входам диоды, входы которых - входы блока. Адаптивный регулятор 4 содержит последовательно соединенные усилитель 16, вход которого - вход блока 4, интегратор 17 и сумматор 18, выход которого является выходом регулятора 4. Вход усилителя 16 через множитель 19 подключен к второму входу сумматора 18, второй вход множителя 19 соединен с выходом вычислителя 15 коэффициента. Вычислитель 15 коэффициента содержит последовательно соединенные квадратор 20 и сумматор 21 через выход- вход блока 15, к второму входу которого подключен эадатчик 22 уставки. Корректируемый фильтр 2 представляет собой последовательно соединенные сумматор 23, вход которого - вход фильтра 2, усилитель 24, интегратор 25, выход которого - второй вход сумматора 23, сумматор 26, усилитель 27, интегратор 28, выход которого - второй вход сумматора 26, и сумматор 29, выход которого является выходом фильтра 2. Выход сумматора 23 через последовательно соединенные усилитель 30 и множитель соединен с третьим входом сумматора 26, выход которого через последовательно соединенные усилитель 32 и множитель 33 соединен с третьим входом сумматора 29, а к вторым входам множителей 31 и 33 подключен выходвычислителя 15 коэффициентаСистема работает следующим образом.1 этап. Включение -го дизеля 1-1) дизелей работают). С помощью ручного управления исполнительным механизмом 7; блока 7 обеспечивается равенство оборотов дизеля 8, блока 8 дизелей с (1-1) работающими. После этого ручной режим управления исполнительным механизмом 7 переводится на автоматический и в дальнейшем управляется с помощью регулятора 6, из блока 6 регуляторов, а включаемых дизель 8, замыкается через механическую муфту 9; сцепления бло ка 9 муфт сцепления на общий редуктор 10. 2 этап работы. Сигнал, суммированный подключенным к выходу исполнительного механизма 7; (=1,2,), блока 7 исполнительных механизмов датчиком 12, положения блока 12 датчиков положения, поступает на вход сумматора 5, блока 5 сумматоров. На другой вход сумматора 5; поступает сигнал с адаптивного регулятора 3. Формируемый сумматором 5 сигнал рассогласования поступает на вход регулятора 6; блока 6 регуляторов, которым вырабатывается сигнал, реализующий линейный закон управления. Полученный сигнал поступает на вход исполнительного механизма 7 блока 7 и1далее, последовательно преобразуясь исполнительным механизмом 7 блока 71 дизелем 8 блока 8 дизелеймуфтой 9сцепления блока 9 муфт сцепле125 2754 зния и редуктором 10, оказывается выходным сигналом системы. Сумматором3 формируется сигнал рассогласованиямежду сигналом с корректйруемогофильтра 2 и сигналом, вырабатываемым подключенным к редуктору 10 датчиком 11 оборотов. Все сигналы с бла.ыа 12 датчиков положения поступаютна вход блока 13 выделения максимума, который вырабатывает максималь Оный из них. Данный сигнал, поступаяна вход инерционного звена 14, усредняется им и далее преобразуется1вычислителем 15 коэффициента по формуле 152-кЬ +3,где- максимальное положение топливной рейки (нОн соответствует закрытому положению,"1" - открытому); 20Ы, 8 - соответственно сигналы сквадратора 20 и задатчика22 уставки. Сигнал с фильтра 2 представляет 25 собой преобразование сигнала с эадатчика 1 оборотов. Характеристики фильтра 2 меняются на основе сигнала 2, поступающего на второй вход корректируемого фильтра 2, передаточ-З 0 ная функция которогоТ, о+1(р) ( ф. " ф. )Ф т,р +где Тор = ЕТ - постоянные, 35Корректируемый фильтр 2 представпяет собой два последовательно соединенных фильтра (блоки 23-26, 30, 31 и блоки 26-29, 32, 33) с передаточными функциями вида 40ТЕр + 1(р)Тр +Поведение дизелей хорошо аппроксимируется моделью с передаточной функцией 45Кч(р) = -- (Тр +1Положение топли вных р е ек в силу нелинейностей клапанов более правильно считать обратно пропорциональным 50 квадрату коэффициента усиления дизелей и пропорциональным квадрату постоянной инерционности. Поэтомув адаптивном регуляторе 4, реализующем пропорционально-интегральный за кон управления, весовой коэффициент при пропорциональной составляющей меняется пропорционально сигналу Б. Таким образом, происходит равенство относительных мощностей, отдаваемых каждым дизелем в отдельности Это следует непосредственно из синхронизации по оборотам и по относительному положению топливных реек,В процессе Ф,нкциониронания меняются динамические и статические характеристики дизелей. Перестройка в сочетании с этими изменениями коэффициента корректируемого фильтра Ткор и весового коэффициента ПИ-регулятора позволяет обеспечить квазиоптимальность переходных процессов, т.е. повысить качество процессов управления. Время перехода с одного режима на другой уменьшается, двигатели большее время работают в одном и том же стационарном режиме, что увеличивает их моторесурсы. А так как режим их функционирования далек от критического и близок к номинальному, наиболее экономичному в смысле потребления энергии, необходимой для функционирования всей системы в целом, то изобретение по сравнению с известной системой обеспечивает снижение энергоемкости процесса управления, т. е. экономию топлива. Формула изобретения Адаптивная система управления параллельно работающими дизельными установками, содержащая последовательно соединенные блок первых сумматоров, блок регуляторов, блок исполнительных механизмов, блок дизелей, блок муфт сцепления, редуктор, выход которого является выходом системы, датчик оборотов и второй сумматор, последовательно соединенные задатчик оборотов и корректируемый фильтр, выход которого соединен с вторым входом второго сумматора, а также блок датчиков положения, входы которого соединены с выходами блока исполнительных механизмов, а выходы - с первыми входами блока первых сумматоров, о т л и ч а ю щ а яс я тем, что, с целью повьюения качества процессов управления, увеличения моторесурсов и экономии гоплива системы, она дополнительно содержит последовательно соедицеццые блок выделения максимума, ин рцион - ное звено, вычислитель коэффициентов и адаптивный регулятор, второй вход1252754 Фиг,2 Фиг.1 Фив.З фиг. 5 Составитель А.ЛящевТехред М.Ходанич Корректор В.Бутяга Редактор О.Бугир Заказ 4620/48 Тираж 836 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж; Раушская наб д. 4/5 Производственно-полиграфическое предприятие,г,ужгород,ул.Проектная,4которого соединен с выходом второгосумматора, а выход подключен к вторым входам блока первых сумматоров,выход вычислителя коэффициентов соединен с вторым входом корректируемого фильтра, а вход блока выделениямаксимума - с выходами блока датчиков положения.
СмотретьЗаявка
3836151, 10.01.1985
ОРДЕНА ЛЕНИНА ИНСТИТУТ ПРОБЛЕМ УПРАВЛЕНИЯ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ, МОСКОВСКИЙ ИНСТИТУТ НЕФТЕХИМИЧЕСКОЙ И ГАЗОВОЙ ПРОМЫШЛЕННОСТИ ИМ. АКАД. И. М. ГУБКИНА, ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО БУРЕНИЮ "ТУРКМЕНСЕВБУРГАЗ"
МУРАДОВ БАЙРАМГЕЛЬДЫ, ЛОЖЕНКОВ ВАЛЕРИЙ ЛЕОНИДОВИЧ, ЛОБАНОВ ВЯЧЕСЛАВ АНАТОЛЬЕВИЧ, ШУБЛАДЗЕ АЛЕКСАНДР МИХАЙЛОВИЧ, АБУБАКИРОВ ВЛАДИМИР ФУАДОВИЧ, ЗАЩЕЛКИН АЛЕКСАНДР ФЕДОРОВИЧ, УЛАНОВ АЛЕКСАНДР ГЕОРГИЕВИЧ, ВАСЯКОВ ДМИТРИЙ ФЕДОРОВИЧ, ШМАКИН АНАТОЛИЙ ГАВРИЛОВИЧ, НЕПОМНЯЩИЙ ЭДУАРД МАТВЕЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: адаптивная, дизельными, параллельно, работающими, установками
Опубликовано: 23.08.1986
Код ссылки
<a href="https://patents.su/4-1252754-adaptivnaya-sistema-upravleniya-parallelno-rabotayushhimi-dizelnymi-ustanovkami.html" target="_blank" rel="follow" title="База патентов СССР">Адаптивная система управления параллельно работающими дизельными установками</a>
Последовательный сумматор

Номер патента: 696452
Опубликовано: 05.11.1979
Авторы: Лужецкий, Оводенко, Стахов
МПК: G06F 7/50
Метки: последовательный, сумматор
...которого формируется сигналпереноса в ( 1+ 2)-й разряд, элемент И10, элемент И 11, который совместно сэлементом эвдержки 12 и элементом ИЛИ13 формирует сигнал переноса в ( 1 - 2)-йразряд, элемент ИЛИ 14, нв выходе которого формируется сигнал суммы 1 -горвзрядв, элементы НЕ 15 и 16. Блок инвертироввния 6 содержит элементы И 1719, элементы задержки 20 и 21, элементы ИЛИ 22-24,элементы НЕ 25, 26, 27.Элементы задержки 20 и 21 осуществляют задержку сигнвлов поступающих нв ихвход нв один такт работы последовательного сумматора. Элемент И 19 и элементы НЕ 25 и 26 выполняют функцию инвертироввния, звпрещвя прохождение сигнвлов через элементы И 17 и 18 и посылвя единичный сигнал нв вход элементаИЛИ 24. Для выполнения операции сложения чисел в...
Последовательный сумматор

Номер патента: 1571573
Опубликовано: 15.06.1990
Авторы: Андреев, Малиночка, Черняк
МПК: G06F 7/49
Метки: последовательный, сумматор
...поступает значение старшего разряда, в данном случае единица, Одноразрядный сумматор 3 производит сложение единицы, присутствующей на егопервом входе, с нулями, присутствующими на втором входе и входе переноса. На выходе суммы одноразрядногосумматора 3 получается единичныйсигнал, а на выходе переноса - нулевой. На выходах 26 - 21 блока 2 формирования дополнительных сигналовсуммы и переноса формируется код000010. По переднему фронту синхроимпульса в регистр 1 записывается код000 О, в триггер 4 задержки записывается нуль, а в триггер 8 задержкизаписывается единица. На вход 11 поступает нулевое значение следующегоразряда входного кода, Одноразрядныйсумматор 3 производит сложение нулей,присутствующих на всех его входахи на выходах...
Последовательный сумматор

Номер патента: 1691835
Опубликовано: 15.11.1991
Авторы: Зимин, Кремез, Роздобара
МПК: G06F 11/08, G06F 7/49
Метки: последовательный, сумматор
...45;+1, 45 н 2. Кроме того, этот сигнал через выход21 проходит на вход соответствующего Т- триггера 53 блока 9 контроля свертки, устанавливая его в "1".По сигналу с входа 13 осуществляется контроль правильности выполнения операции свертки. В случае отсутствия ошибкипри выполнении операции свертки в 1-м разряде блока 7 на выходе элемента И 37 формируется сигнал, который, поступая через выход 21 на вход Т-триггера 53 ь переводит его в нулевое состояние, В случае ошибки в любом из четырех старших разрядов блока7 на выходе 16 формируется сигнал ошибкипорции и формирования и-разрядного кода суммы требуется (и+3) такта работы последовательного сумматора.Пример работы последовательного сумматора при сложении кодов "01001" и "01010"...
Последовательный сумматор

Номер патента: 1341633
Опубликовано: 30.09.1987
Автор: Ткаченко
МПК: G06F 7/49
Метки: последовательный, сумматор
...отсутствуют, т.е,сложение осуществляется в реальноммасштабе времени,Элементы 4, 4, 4 З задержкинеобходимы для запоминания сигналапереноса и выполнены на Э-триггерах,Сигнал переноса в (Б - 2)-й и(Б - 3)-й разряды кода суммы формируется элементом И 5 в Б-м тактесогласно булевой записи где А , В з - Б-е разряды кодов операндов.Элемент ИЛИ 7 формирует значение суммы в Б-м такте согласно переключательной функции= А Ч ВЧ РД 1 Р, (6)Элемент ИЛИ 7 необходим для выработки единичного сигнала с целью его записи в младший разряд кода суммы согласно алгоритму (4) .Последовательный сумматор работает следующим образом.Допустим, необходимо произвести сложение 6 + 6. Число 6 в минимальной системе счисления имеет вид:разряда 1 2 3 4 5 6 7 Вес разряда 1 1...
Последовательный сумматор-вычитатель

Номер патента: 1424009
Опубликовано: 15.09.1988
Авторы: Рощинский, Титов, Титова
МПК: G06F 7/50
Метки: последовательный, сумматор-вычитатель
...прихода очередных бит операндов в зависимости от их значения и значения сигнала ца прямом входе 18 переноса, который поступает с прямого выхода первого триггера 12, ца выходе второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 11 формируется выходной бит суммы. Комбинационная схема, образованная первьы - третьим элементами И 1-3 и первым элементом ИЛИ 7, формирует функцию возбуждения (сигнал лог. "0" или лог. "1) для первого триггера 12, С приходом тактового импульса по входу 24 тактирования значение сигнала с выхода первого элемента ИЛИ 7 переписывается в первый триггер 12. Им будет определяться внутреннее состояние устройства в следующем тактевычисления. Нд выходе второго элемента ИЛИ 8 цд нсс время выполнения операции сложения будет присутствовать...
Предыдущий патент: Пневматический позиционер
Следующий патент: Устройство для управления адаптивным роботом
Случайный патент: Способ получения крупнокристаллической поваренной соли