Устройство для программного управления процессом сборки интегральных микросхем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
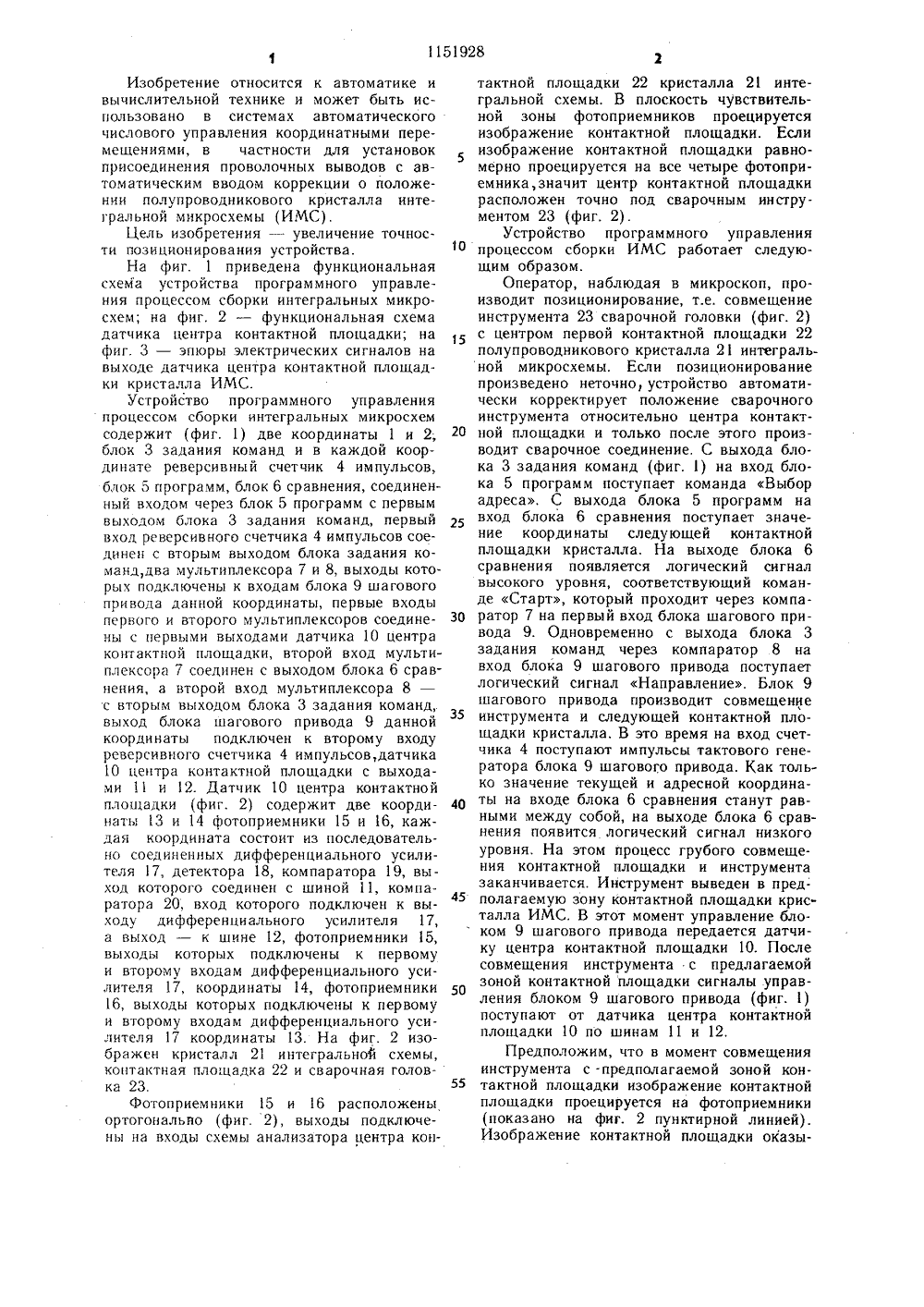
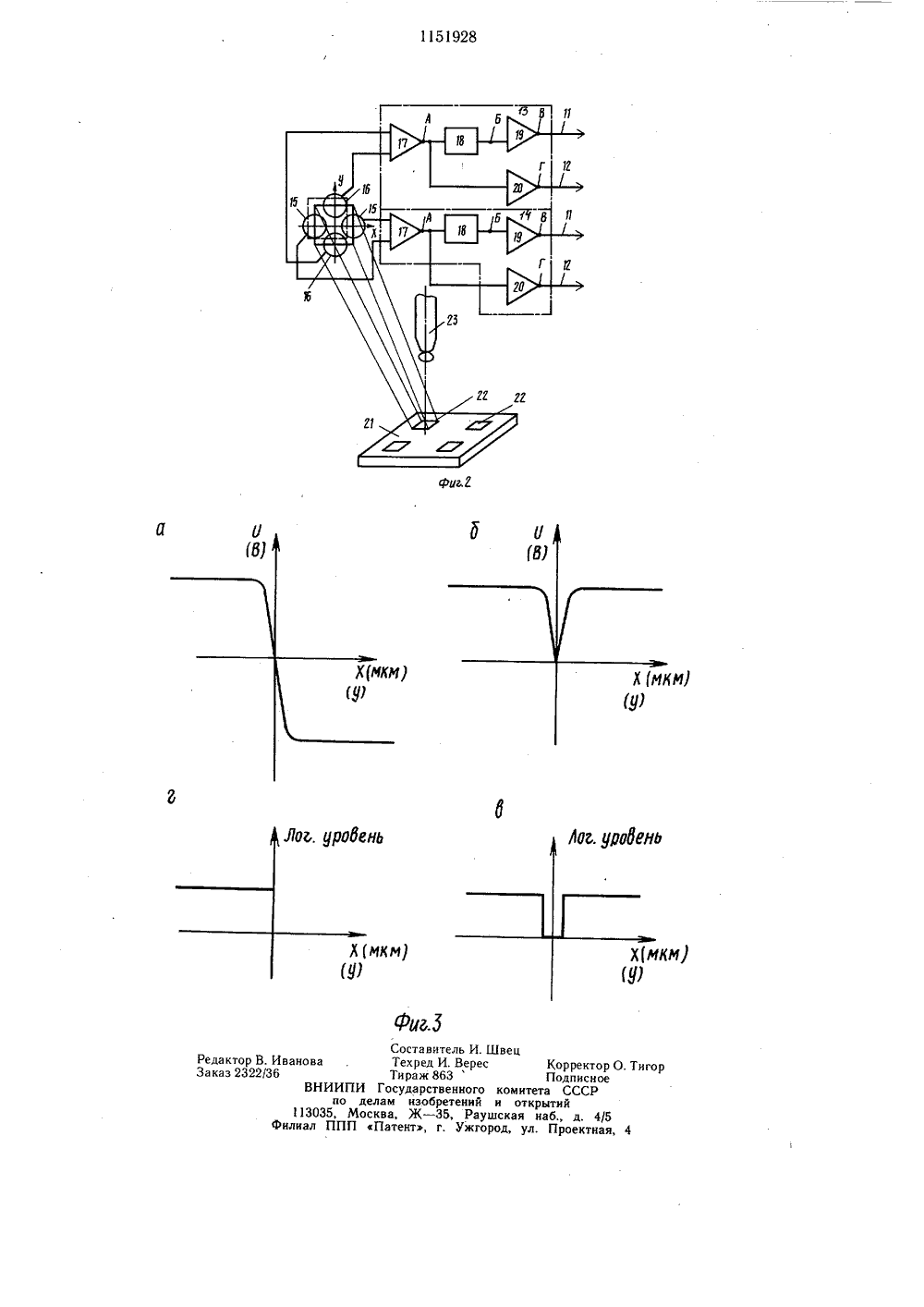
,801151928 8 4(59 6 05 ПИСАНИЕ ИЗОБРЕТЕНИЯ А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(72) В. М. Колешко и В. К. Урбанович (71) Институт электроники АН Белорусской ССР(54) (57) 1. УСТРОЛСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ СБОРКИ ИНТЕГРАЛЬНЫХ МИКРОСХЕМ, содержащее блок задания команд и в каждой координате реверсивный счетчик импульсов, выход которого подключен к первому входу блока сравнения, соединенного вторым входом через блок программ с первым выходом блока задания команд, первый вход реверсивного счетчика импульсов соединен с вторым выходом блока задания команд, отличающееся тем, что, с целью увеличения точности позиционирования устроиства, в него введены датчик центра контактной площадки и в каждую координату - два мультиплексора, выходы которых подключены к входам блока шагового привода данной координаты, первые входы первого и второго мультиплексоров соединены с первыми выходами датчика центра контактной площадки, второй вход первого мультиплексора соединен с выходом блока сравнения, а второй вход второго мультиплексора - с вторым выходом блока задания команд, выход блока шагового привода данной координаты подключен к второму входу реверсивного счетчика импульсов.2. Устройство по п. 1, отличающееся тем, что датчик центра контактной площадки содержит первый компаратор и последовательно соединенные дифференцирующий усилитель, детектор и второй компаратор, выход которого соединен с первым выходом датчика центра контактной площадки, второй выход которого подключен к выходу первого компаратора.10 15 20 25 30 35 40 45 50 55 Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического числового управления координатными перемещениями, в частности для установок присоединения проволочных выводов с автоматическим вводом коррекции о положении полупроводникового кристалла интегральной микросхемы (ИМС).Цель изобретения - увеличение точности позиционирования устройства.На фиг. 1 приведена функциональная схема устройства программного управления процессом сборки интегральных микросхем; на фиг. 2 - функциональная схема датчика центра контактной площадки; на фиг. 3 - эпюры электрических сигналов на выходе датчика центра контактной площадки кристалла ИМС.Устройство программного управления процессом сборки интегральных микросхем содержит (фиг. 1) две координаты 1 и 2, блок 3 задания команд и в каждой координате реверсивный счетчик 4 импульсов, блок 5 программ, блок 6 сравнения, соединенный входом через блок 5 программ с первым выходом блока 3 задания команд, первый вход реверсивного счетчика 4 импульсов соединен с вторым выходом блока задания команд,два мультиплексора 7 и 8, выходы которых подключены к входам блока 9 шагового привода данной координаты, первые входы первого и второго мультиплексоров соединены с первыми выходами датчика 10 центра контактной площадки, второй вход мультиплексора 7 соединен с выходом блока 6 сравнения, а второй вход мультиплексора 8 - с вторым выходом блока 3 задания команд, выход блока шагового привода 9 данной координаты подключен к второму входу реверсивного счетчика 4 импульсов, датчика 10 центра контактной площадки с выходами 11 и 12. Датчик 10 центра контактной площадки (фиг. 2) содержит две координаты 13 и 14 фотоприемники 15 и 16, каждая координата состоит из последовательно соединенных дифференциального усилителя 17, детектора 18, компаратора 19, выход которого соединен с шиной 11, компаратора 20; вход которого подключен к выходу дифференциального усилителя 17,а выход - к шине 12, фотоприемники 15,выходы которых подключены к первому и второму входам дифференциального усилителя 17, координаты 14, фотоприемники 16, выходы которых подключены к первому и второму входам дифференциального усилителя 17 координаты 13. На фиг. 2 изображен кристалл 21 интегрально% схемы, контактная площадка 22 и сварочная головка 23.Фотоприемники 15 и 16 расположены ортогоцальво (фиг. 2), выходы подключены ца входы схемы анализатора центра коцтактной площадки 22 кристалла 21 интегральной схемы. В плоскость чувствительной зоны фотоприемников проецируется изображение контактной площадки. Если изображение контактной площадки равномерно проецируется на все четыре фотоприемника,значит центр контактной площадки расположен точно под сварочным инструментом 23 (фиг. 2).Устройство программного управления процессом сборки ИМС работает следующим образом.Оператор, наблюдая в микроскоп, производит позиционирование, т.е. совмещение инструмента 23 сварочной головки (фиг. 2) с центром первой контактной площадки 22 полупроводникового кристалла 21 интегральной микросхемы. Если позиционирование произведено неточно, устройство автоматически корректирует положение сварочного инструмента относительно центра контактной площадки и только после этого производит сварочное соединение. С выхода блока 3 задания команд (фиг. 1) на вход блока 5 программ поступает команда Выбор адреса. С выхода блока 5 программ на вход блока 6 сравнения поступает значение координаты следующей контактной площадки кристалла. На выходе блока 6 сравнения появляется логический сигнал высокого уровня, соответствующий команде Старт, который проходит через компаратор 7 на первый вход блока шагового привода 9. Одновременно с выхода блока 3 задания команд через компаратор 8 на вход блока 9 шагового привода поступает логический сигнал Направление. Блок 9 шагового привода производит совмещение инструмента и следующей контактной площадки кристалла, В это время на вход счетчика 4 поступают импульсы тактового генератора блока 9 шагового привода. Как только значение текущей и адресной координаты на входе блока 6 сравнения станут равными между собой, на выходе блока 6 сравнения появится логический сигнал низкого уровня. На этом процесс грубого совмещения контактной площадки и инструмента заканчивается. Инструмент выведен в предполагаемую зону контактной площадки кристалла ИМС. В этот момент управление блоком 9 шагового привода передается датчику центра контактной площадки 10. После совмещения инструмента с предлагаемой зоной контактной площадки сигналы управления блоком 9 шагового привода (фиг. 1) поступают от датчика центра контактной площадки 10 по шинам 11 и 12.Предположим, что в момент совмещения инструмента с -предполагаемой зоной контактной площадки изображение контактной площадки проецируется на фотоприемники (показано на фиг. 2 пунктирной линией).Изображение контактной площадки оказывается смещенным относительно центра датчика. Поскольку изображение контактной площадки кристалла является светлым, а окружающее пространство темным, световой поток, попадающий на фотоприемники 15 и 16 (фиг, 2) будет различным по величине. На выходе фотоприемников 16 координаты 13 появятся сигналы различной величины. Разностный сигнал обоих фотоприемников 16 усиливается дифференциальным усилителем 17 координаты 13 (фиг. 2). По другой координате с выходов фотоприемников 15 разностный сигнал усиливается усилителем 1 координаты 14. Сигнал на выходе усилителя 17 может менять свой знак в зависимости от положения иэображения контактной площадки относительно центра датчика. В зависимости от знака сигнала на выходе усилителя 17 компаратор 20 выдает на шину 12 сигнал Направление. На выходе детектора 18 абсолютного значения сигнал будет всегда одного знака, но по величине равен сигналу усилителя 17. Компаратор 19 выдает на шину 11 сигнал Старт. Сигналы Старт и Направление по шинам 11 и 12 поступают в блок 9 шагового привода (фиг. 1) через компараторы 7 и 8 соответственно. Центр изображения контактной площадки 24 (фиг. 2) совмещается с центром датчика, на выходах усилителей 17 координат 13 и 14 устанавливается сигнал близкий по величине к нулю, на шинах 11 координат 13 и 14 появляется .сигнал Стоп, шаговые двигатели останавливаются. Коррекция положения инструмента относительно центра контактной площадки полупроводникового кристалла заканчивается. Эпюры сигналов на выходе усилителя 17 фиг. 2 детектора абсолютного положения и компараторов 19 и 20 показаны на фиг. 3. Эпюры показывают зависимости входных сигналов в соответствующих точках функциональной схемы датчика центра контактной площадки фиг. 2, указанных буквами А, Б, В, Г от величины перемещений в соответствующем направлении. Как видно из приведенных зависимостей, при переходе изображения контактной площадки через центр датчика сигналы на выходе датчика шины 11 и 12 координат 13 и 14 меняются по закону, изображенному на эпюрах В и Г фиг. 3 соответственно. Логический сигнал шины 12 5(фиг. 2) - эпюра г (фиг. 3), переключает направление привода в зависимости от логического уровня, логический сигнал шины 11 (фиг. 2) производит остановку шагового двигателя - эпюра В (фиг. 3).Таким образом, устройство для двухкоординатного программного управления при помощи датчика центра контактной площадки и блока логики производит более, точную корректировку положения сварочного инструмента относительно центра кон тактной площадки интегральной схемы независимо от сбоев в электрических цепях счетчика текущих координат и блока программ, а также независимо от субъективных факторов, вносимых оператором в процесс коррекции программы, влияющих на точ ность позиционирования инсрумента относительно контактной площади полупроводникового кристалла ИМС. В качестве датчика центра контактнойплощадки кристалла может быть применен, например, телевизионный датчик на основе видикона или прибора с зарядовой связью (ПЗС).Применение предлагаемого устройствадля двухкоординатного программного управ ления позволяет повысить точность позиционирования рабочего инструмента относительно контактной площадки полупроводникового кристалла ИМС, а следовательно, увеличить выход годных приборов, повысить производительность оборудования за счет уменьшения времени коррекции программы оператором. Уменьшение времени коррекции объясняется тем, что снижается требование к точности коррекции, т.е. достаточно приблизительно вывести инструмент в район 40 контактной площадки, но совмещая его сцентром и, введенные в устройство датчик центра контактной площадки и блок логики автоматически произведут точное совмещение (позиционирование) инструмента и контактной площадки кристалла ИМС.едактор В. Иванов а каз 2322/36 Фаг.5 Составитель И. Шве Техред И. Верес Тираж 863ПИ Государственного ком делам изобретений иМосква, Ж - 35, РаушскаП Патент, г. Ужгород,Корректор О. ТигоПодписи оеитета СССРоткрытийя на 6., д. 4/5ул. Проектная, 4
СмотретьЗаявка
3515560, 01.12.1982
ИНСТИТУТ ЭЛЕКТРОНИКИ АН БССР
КОЛЕШКО ВЛАДИМИР МИХАЙЛОВИЧ, УРБАНОВИЧ ВИКТОР КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/425
Метки: интегральных, микросхем, программного, процессом, сборки
Опубликовано: 23.04.1985
Код ссылки
<a href="https://patents.su/4-1151928-ustrojjstvo-dlya-programmnogo-upravleniya-processom-sborki-integralnykh-mikroskhem.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления процессом сборки интегральных микросхем</a>
Устройство для подсоединения многоконтактных изделий к контактному блоку

Номер патента: 434633
Опубликовано: 30.06.1974
Авторы: Исаенко, Комаровский, Контуш, Крук
МПК: H05K 13/00
Метки: блоку, контактному, многоконтактных, подсоединения
...которые закреп лены на корпусе контактного блока 2. ема описываемого фиг, 2 - разрез по - разрез по Б - Б П Устройство дтактных изделсостоящее изв нем одинмеханизма вдом, стола длий, размещблока, отл ля енн ича Изобретение относится к радиотехнике.Известно устройство для подсоединения многоконтактных изделий к контактному блоку, состоящее из корпуса и расположенных в нем один над другим прижимного механизма в виде крестовины с приводом, стола для установки проверяемых изделий, размещенного в рамке, и контактного блока.Цель изобретения - повышение качества контактирования проверяемых изделий с контактным блоком.Для достижения этой цели корпус снабжен неподвижно закрепленными в нем направляющими, в которых подвижно размещена упомянутая...
Способ получения когерентного излучения на f+2 -центрах в кристалле фтористого лития
Номер патента: 1414266
Опубликовано: 09.07.1995
Авторы: Иванов, Иншаков, Хулугуров
МПК: H01S 3/16
Метки: излучения, когерентного, кристалле, лития, фтористого, центрах
СПОСОБ ПОЛУЧЕНИЯ КОГЕРЕНТНОГО ИЗЛУЧЕНИЯ НА F+2 -ЦЕНТРАХ В КРИСТАЛЛЕ ФТОРИСТОГО ЛИТИЯ, включающий облучение кристалла ионизирующим излучением и накачку его излучением импульсных газоразрядных ламп, отличающийся тем, что, с целью повышения энергии излучения путем увеличения концентрации рабочих центров окраски при одновременном упрощении способа, облучают кристалл ионизирующим излучением при температуре 78 243 К.
Устройство для управления адаптивным роботом

Номер патента: 1252755
Опубликовано: 23.08.1986
Авторы: Каляев, Капустян, Носков, Усачев
МПК: G05B 19/00
Метки: адаптивным, роботом
...кратчайшего пути, выделения первого шага и отработки его блоком 5приводов возобновляется, но уже приусловии, что ключевые элементы 11,соответствующие положениям робота,в которых он соприкасается с даннойточкой препятствия, заблокированы ице участвуют в процессе моделированиякратчайшего пути.Если препятствие в рабочей зонеимеет большие размеры и сложную форму, то в процессе адаптации к даннойситуации в рабочей зоне робота происходит всего несколько касаний роботас каждым из препятствий, а если размеры препятствия достаточно малы, тодостаточно одного касания, после чего устройство управления управляетдвижением робота беэ соприкосновенийс препятствиями,С помощью блока 16 в блоке 1 набираются значения координат роботапо каждой степени...
Система управления стенда для испытания двигателей внутреннего сгорания
Номер патента: 1777024
Опубликовано: 23.11.1992
Авторы: Забышный, Миронов, Нестеров, Орда, Шула
МПК: G01M 15/00
Метки: внутреннего, двигателей, испытания, сгорания, стенда
...выбора режима в блок 9 коммутации, происходит подключение на его вход необходимого канала формирования задания в соответствии с выбранным режимом работы. (Например, для режима постоянной скорости - первого канала). По сигналу, пришедшему от второго выхода блока 10 выбора режима в блоке 6 коммутации задания, происходит подключение на его вход блока 5 зэдатчика. В ЭВМ 11 от блока 10 выбора режима поступает сигнал о ручном режиме работы системы. При наличии данного сигнала ЭВМ 11 никаких управляющих воздействий в систему не выдает.Управление величиной нагружения производит оператор с помощью блока 5 задатчика. Сигнал задания сравнивается в блоке 7 сравнения с сигналом обратной связи от блока 8 датчика и величина рассогласования поступает...
Контактный датчик для контроля расцентровок между ротором и статором турбомашин

Номер патента: 177903
Опубликовано: 01.01.1966
МПК: F01D 21/04
Метки: датчик, контактный, между, расцентровок, ротором, статором, турбомашин
...уплотнений от задеваций ротора и статора. Я КОНТРОЛЯ РАСЦЕНТРОВОКСТАТОРОМ ТУРБОМАШИН жинный неподвижный контакт о, установленный в фигурном вырезе планки так, что может отгибаться внутрь паза в сторону корпуса на величину, определяемую толщиной 5 планки и превышающую возможные расцецтровки ротора 7 и статора 8 турбомашины.Корпус с помощью болтов и пластинки 9 крепится к статору турбомашицы вблизи лабирицтового уплотцительного элемента. Корпус 10 вместе с укрепленными ца нем деталями изолирован от статора изоляторами 10. Для уменьшения вероятности загрязнения контактов в сквозном отверстии крышки укреплена втулка 11. Радиальный зазор а между кон тактами меньше максималы 0 возможногорадиального перемещения (люфта) б уплотцительного...
Предыдущий патент: Цикловая система программного управления промышленным роботом
Следующий патент: Устройство для централизованного контроля параметров
Случайный патент: Устройство для резервного электроснабжения нагрузки