Система управления судовым турбоагрегатом с винтом регулируемого шага
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1071778
Авторы: Вольский, Ермолаев-Маковский, Перепелкина, Пинский, Файкин


Текст
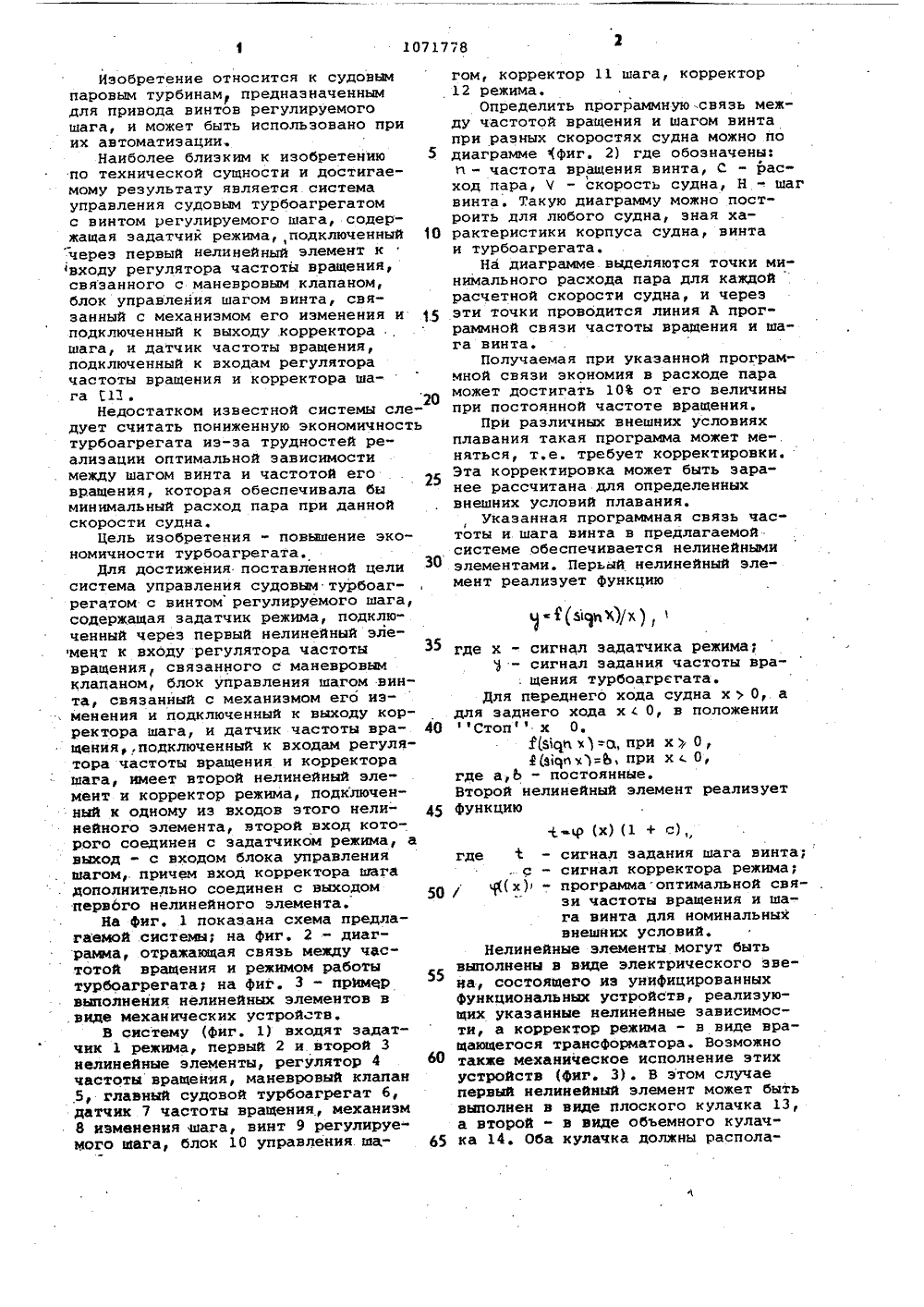
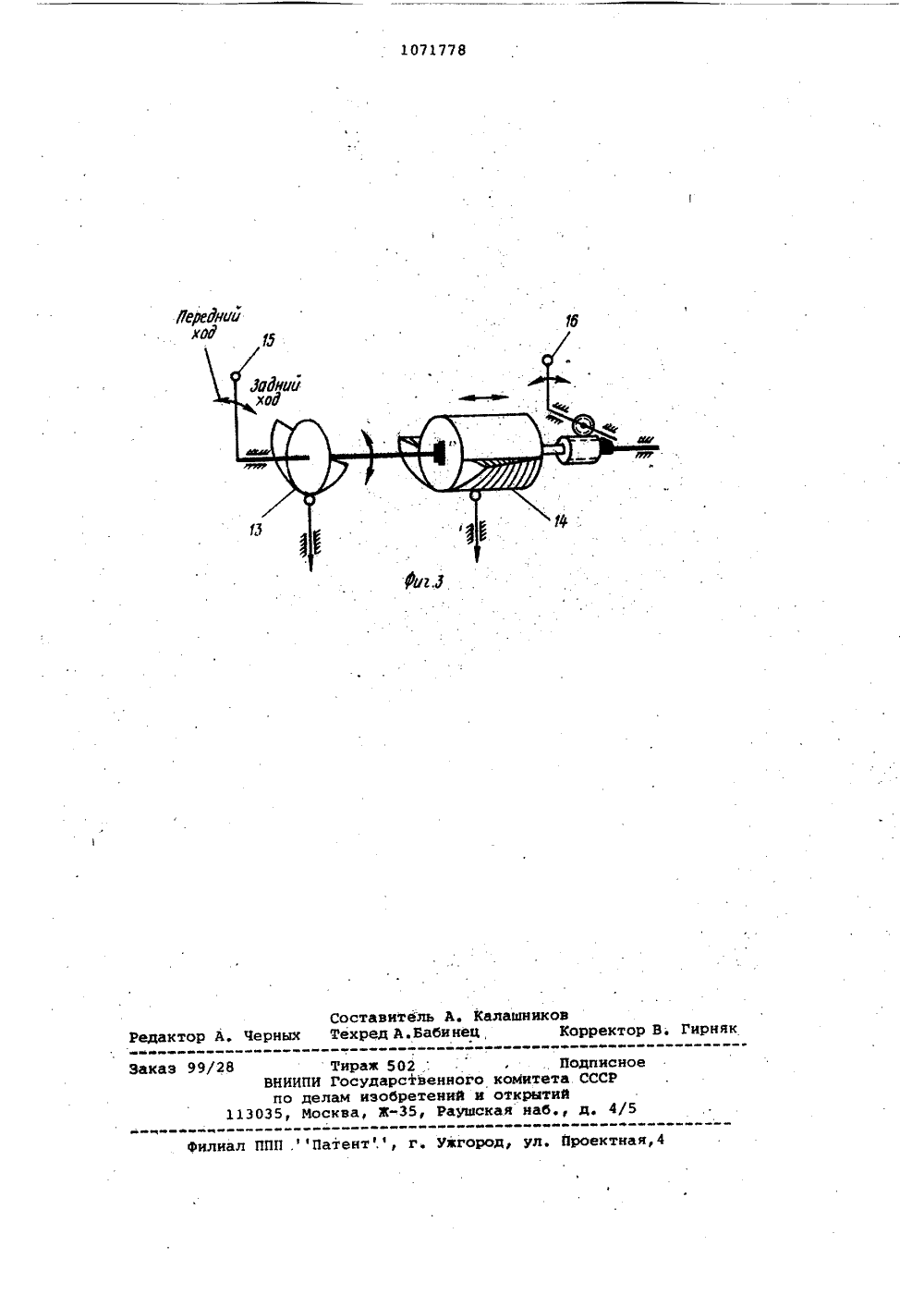
) Р 01 Ъ 17/2 63 Н 21/2 Г ДПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙОПИСАНИЕ ИЗОБРЕТЕНК АВТРРСМОМУ СВИДВТВЪСТВУ егоходуасто ОСУ АРСТВЕННЫЙ КОМИТЕТ СССР(56): 1. Авторское свидетельство СССР В 903573 кл. В 01 Р 17/20, 1980. (54)(57) СИСТ)РВ УПРАВЛЕНИЯ СУДОВЫМ ТЗРВОЮРЕПЛОМ С ВИНТ(Ж РЕРУЛИРУЕМОЖ ЮГА, содержащая задатчик режима, ПО(СЛ(0 ЧЕННЫй ЧЕРЕЗ ПЕРВЫЙ НЕЛИНЕйНЫй ,.элемент к входу регулятора частоты вращения, связанного с маневровым клапаном, блок управления шагом винУ та, связанный с механизмом изменения и подключенный к выкорректора шага, и датчик ч тывращения, подключенный к входам регулятора частоты вращения н коррек.тора шага, о т л и ч а ю щ а я с ятем, что, с целью повышения экономичности турбоагрегата, системаимеет второй нелинейный элемент икорректор режима, подключенный кодному из входов этого нелинейногоэлемента, второй вход которого соединен с задатчиком режима, а выходс входом блока управления йй 1 ом,причем вход корректора шага дополнтельно. соединен с выходом первогонелинейного элемента.60 Изобретение относится к судовымпаровым турбинам предназначеннымдля привода винтов регулируемогошага, и может быть использовано приих автоматизации.Наиболее близким к изобретению 5по технической сущности и достигаемому результату является. системауправления судовым турбоагрегатомс винтом регулируемого шага, содер- жащая задатчик режимаподключенный 10через первый нелинейный элемент к входу регулятора частоты вращения,связанного с маневровым клапаном,блок управления шагом винта, связанный с механизмом его изменения и 1.5подключенный к выходу .корректора .,шага, и датчик частоты вращения,подключенный к входам регуляторачастоты вращения и корректора шага С 13.20Недостатком известной системы следует считать пониженную экономичностьтурбоагрегата из-за трудностей реализации оптимальной зависимостимежду шагом винта и частотой еговращения, которая обеспечивала быминимальный расход пара при даннойскорости судна.Цель изобретения - повышение экономичности турбоагрегата.Для достижения поставленной целисистема управления судовым турбоагрегатом с винтом регулируемого шага, содержащая задатчик режима, подключенный через первый нелинейный элемент к входу регулятора частоты З 5 вращения, связанного с маневровым клапаном, блок управления шагом винта, связанный с механизмом его из. менения и подключенный к выходу корректора шага, и датчик частоты вра щенияподключенный к входам регулятора частоты вращения и корректора шага, имеет второй нелинейный элемент и корректор режима, подключенный к одному из входов этого нелинейного элемента, второй вход которого соединен с задатчиком режима, а выход - с входом блока управления шагом,. причем вход корректора вага дополнительно соединен с выходом первЬго нелинейного элемента.На фиг. 1 показана схема предлагаемой системы; на Фиг. 2 - диаграьваа, отражающая связь между частотой вращения и режимом работы турбоагрегата на фиг. 3 - прймЕр выполнения нелинейных элементов в ,виде механических устройств.В систему (Фиг. 1) входят задатчик 1 режима, первый 2 и второй 3 нелинейные элементы, регулятор 4 частоты вращения, маневровый клапан 5, главный судовой турбоагрегат 6, датчик 2 частоты вращения, механизм 8 изменения шага, винт 9 регулируемого мага, блок 10 управления ша гом, корректор 11 шага, корректор 12 режима.Определить программную -связь меж" ду частотой вращения и шагом винта при разных скоростях судна можно по диаграмме (фиг. 2) где обозначены: й - частота вращения винта, С - расход пара, Ч - скорость судна, Н -. шаг винта. Такую диаграмму можно построить для любого судна, зная характеристики корпуса судна, винта и турбоагрегата.На диаграмме выделяются точки минимального расхода пара для каждой расчетной скорости судна, и через эти точки проводится линия А программной связи частоты вращения и шага винта.Получаемая при указанной программной связи экономия в расходе пара может достигать 10 от его величины при постоянной частоте вращения.При различных внешних условиях плавания такая программа может меняться, т,е. требует корректировки. Эта корректировка может быть заранее рассчитана для определенных внешних условий плавания.Указанная программная связь частоты и шага винта в предлагаемой системе .обеспечивается нелинейными элементами. Перьый нелинейный элемент реализует функцию где х - сигнал задатчика режима;- сигнал задания частоты вра. щения турбоагрегата.Для переднего хода судна хО, адля заднего хода х с О, в положениифСтоп х О,У 81 срх=а, при х), О,УЬнрх 1=Ь, при х с. О,где а,Ь " постоянные.Второй нелинейный элемент реализуетФункциюр(х)(1+ с) где 1 - сигнал задания шага винта;,. с - сигнал корректора режима; / фх) - программа. оптимальной связи частоты вращения и шага винта для номинальныхвнешних условий.Нелинейные элементы могут быть выполнены в виде электрического звена, состоящего иэ унифицированных Функциональных устройств, реализующих указанные нелинейные зависимости, а корректор режима - в виде вращающегося трансформатора. Возможно также механическое исполнение этих устройств (фиг. 3). В этом случае первый нелинейный элемент может быть выполнен в виде плоского кулачка 13, а второй - в виде объемного кулачка 14, Оба кулачка должны располагаться на одной оси с рукояткой 15 эадатчика режима и поворачиваться вместе с нею. Объемный кулачок, кро-, ме того, должен сдвигаться по этой оси приводом 16 - корректором режима.Система работает следующим образом.5Для изменения хода судна перемещают рукоятку управления ходом, воздействующую на задатчнк 1 режима. Сигнал задатчика режима через первый нелинейный элемент 2 поступает 10 на настроечный вход регулятора 4 частоты вращения, осуществляющего поддержание заданного значения частоты вращения винта 9 воздействием на маневровый клапан 5 турбоагрега та б. Сигнал обратной связи регулятор 4 получает от датчика 7 частоты вращения.Одновременно сигнал задатчика 1 через второй нелинейный элемент Э поступает на первыйвход блока 10 управления шагом, воздействующего на механизм 8 изменения шага винта 9, устанавливая лопасти винта в нулевое положение или в положение переднего или заднего хода, выбранное иэ условия минимального расхода пара на турбоагрегат.При плавании судна в условиях, значительно отличающихся от расчетных, например при изменении осадки сильном волнении или ветре, влияю- .щах на вид программной связи частоты. вращения и шаГа винта, корректором 1,2, режима воздействуют на второй вход второго нелинейного элемента 3, корректируя его выходной сигнал, управляющий шагом винта. Для изменейия величины и направления.хода судна воздействуют на задатчик 1, одновременно изменяя величину настройки регулятора частоты вращения и положение шага винта.При проведении маневров. возможны перегруМки трубоагрегата по моменту сопротивления, вызванный ею провал частоты вращения винта и ухудшение приемистости судна. Для уменьшения этих явлений предусмотрен корректор 11 шага, на первый вход которого поступает сигнал датчика 7 частоты вращения, а на второй - сигнал настройки регулятора частоты вращения от первого нелинейного элемента 2. На выходе корректора 11 шага вырабатывается сигнал, пропорциональный отклонению фактической частоты вращения от заданной при большем значении последней, в случае превышения этим отклонением величины неравномерности регулятора 4. Выходной сигнал корректора .11 поступает на второй вход блока 10 управления шагом, осуществляя сдвиг заданного шага в сторону его уменьшения по модулЮ. Тем самым осуществляется уменьшение перегрузки турбоагрегата и улучшение приемистости судна. Предлагаемая система обеспечивает повыаение экономичности турбоагрегата на частичных,нагрузках, так как за счет выбора оптимального со отношения частоты вращения и шага винта обеспечиваются минимально воэ" можные расходы пара в турбоагрегат для заданного хода судна.1071778 Фи 1,3 Составитель А. КалашникоЧерных Техред А. Баби нец,ректор В як Редакто 99/28 е а лиал ППП .Патент г. Уагород, ул. Проектн Рее 0 нойкои Тнраа 502 .: , Подпнс ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 35, Москва, Ж, Раушская наб., д. 4
СмотретьЗаявка
3515239, 26.11.1982
ПРЕДПРИЯТИЕ ПЯ А-3500
ВОЛЬСКИЙ ВИТАЛИЙ ЕВГЕНЬЕВИЧ, ЕРМОЛАЕВ-МАКОВСКИЙ АЛЕКСАНДР ВЛАДИМИРОВИЧ, ПЕРЕПЕЛКИНА НАТАЛЬЯ ВЛАДИМИРОВНА, ПИНСКИЙ ЭРНЕСТ ЕФИМОВИЧ, ФАЙКИН ГАРРИ МИХАЙЛОВИЧ
МПК / Метки
МПК: F01D 17/20
Метки: винтом, регулируемого, судовым, турбоагрегатом, шага
Опубликовано: 07.02.1984
Код ссылки
<a href="https://patents.su/4-1071778-sistema-upravleniya-sudovym-turboagregatom-s-vintom-reguliruemogo-shaga.html" target="_blank" rel="follow" title="База патентов СССР">Система управления судовым турбоагрегатом с винтом регулируемого шага</a>
Пневмогидравлический механизм для автоматического изменения шага воздушного винта и для установки его лопастей по потоку

Номер патента: 69044
Опубликовано: 01.01.1947
Автор: Бас-Дубов
МПК: B64C 11/06, B64C 11/38
Метки: винта, воздушного, изменения, лопастей, механизм, пневмогидравлический, потоку, установки, шага
...повернуть пробку крана 9 на 180. В этом случае на увеличение шага масло будет идти по магисрапи 7, каналу 14, прорезанному на наруной пове 1 хности пробки крана, трубопроводу 4, и слив - по магистрали б, каналу 15 прооки крапа и трубопроводу 5 1 ерез золотник регулятора в картер двпгатепяПри первом положении пробки крана (изоб,ке), регулятор 8 будет увеличивать шаг при уве раженном на чертеличении числа обг,Го ЯО 44 Предмет изобретения ПневмОГлр 2 Влический механизх 1 д,151 азтоматическо 0 изснеи 51 шага воздушного винта и для установки его лоастей по ютоку, о т. л и ч а ю ш, и й с я тем, что для перевода винта на режим реверса и обратно при постоянном числе его оборотов применен кра-переключа" Бь, мон ирОВяыЙ Б кор 5 се 1 еГулятор 2...
Преобразователь скорости вращения в частоту электрических колебаний

Номер патента: 640406
Опубликовано: 30.12.1978
Автор: Фурман
МПК: H02M 3/44
Метки: вращения, колебаний, скорости, частоту, электрических
...вчастоту электрических колебаний представляет собой высокочастотный автогенераторсинусоидальных колебаний, добротностьконтура которого модулируется зубчатымвращающимся диском 1 за счет изменениявоздушного зазора между ферритовым сердечником 2 и зубчатым вращающимся диском 1, вносящим в контур активные потери,Выходной сигнал автогенератора преобразуется двухполупериодным выпрямителем 10 и выходным фильтром 11 в постоянное напряжение положительной полярности, так что чередованию режимов наличия и отсутствию колебаний автогенераторапри вращении зубчатого вращающегосядиска 1 ца выходе преобразователя соответствует последовательность импульсовположительной полярности, Частота следования этих импульсов равна частоте внешней модуляции,...
Редукционный клапан для систем регулирования шага воздушного винта

Номер патента: 197372
Опубликовано: 01.01.1967
Авторы: Демиденко, Зеркаленков
МПК: F16K 31/163
Метки: винта, воздушного, клапан, редукционный, систем, шага
...с применением предлагаемого редукционногоклапана.Клапан состоит из корпуса 1, дифференциального плунжера 2, жесткого упора 3,термокомпенсатора 4, регулировочной шайбы5 и крышки б. Корпус соединен каналомс маслонасосом и каналом 8 - с рабочимиполостями сервомеханизма изменения шагавинта,10 Масло от маслонасоса по каналу 7 поступает к регулятору оборотов винта и к плунжеру 2 редукционного клапана. Под действием давления масла плуижер перемещается до упора 3 и вместе с ним прижимается15 к шайбе крышки 6, В таком положении плунжера открываются отверстия в корпусе, имасло проходит к маслонасосу,При повышении температуры масла еговязкость уменьшается и расход через откры 20 тые отверстия корпуса возрастает, ио тсрмокомпенсатор 4,...
Центробежно-гидравлический регулятор шага воздушного винта

Номер патента: 253592
Опубликовано: 01.01.1969
Авторы: Алексеев, Кар, Нестеров, Ногтев, Хилько
МПК: B64C 11/30
Метки: винта, воздушного, регулятор, центробежно-гидравлический, шага
...аппарата, Достигается это тем, что предлагаемый регулятор снабжен гидромеханической муфтой с зубчатой шестерней, входящей в зацепление с рейкой сервопоршня и управляемой подпружиненным клапаном с,электромагнитом.На чертеже изображена схема описываемого центробежно-гидравлического регулятора шага воздушного винта.Регулятор содержит подпружиненный распределительный золотник 1, управляемый тахометром 2, сервопоршень 3 с зубчатой рейкой 4 и гидромеханическую муфту 6 с зубчатой шестерней 6, входящей в зацепление с рейкой 4 и управляемой подпружиненным клапаном 7 с электромагнитом 8.При переходе на ручное управлене шагомвинта подается питание в цепь электромагнита 8 и происходит срабатывание клапана 7, включающего муфту б. При этом зубчатая...
Система дистанционного автоматизированого управления шагом воздушных винтов

Номер патента: 317274
Опубликовано: 01.01.1971
Авторы: Букин, Кондратенко, Морозов, Мохова, Мушанов, Наумов, Сиротин, Ткач, Федин, Шперлинг
МПК: B64D 31/06
Метки: автоматизированого, винтов, воздушных, дистанционного, шагом
...угол устанавливается положение шагвинта. Электрические сигналы, пропорцинальные задаваемому углу поворота лопастей винта и фактическому углу поворота ис датчика 7 обратной связи, поступают н30 элементы 2. С последних разностные электри317274 Подписное Тираж 523 Изд.1460 Заказ 1879/1 Типография, пр. Сапунова, 2 ческие сигналы поступают на формирователи 3 и 4 сигналов зон. Формирователь сигналов узкой зоны вырабатывает командный сигнал при угле рассогласования + 0,5, формирователь сигиалов широкой зоны - при угле рассогласования + (1,5 - 2,0).С формирователя сигналов узкой зоны через логические элементы ИЛИ б и И 5 управляющий сигнал в зависимости от знака разностното сигнала (Ъзад 1 дос(0), (эад - 7 дос) О) поступает на один из...
Предыдущий патент: Регулятор давления паровой турбины
Следующий патент: Паросиловая установка
Случайный патент: Способ формирования и воспроизведения сигнала индекса телевизионного канала