Манипулятор с программным управлением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 733975
Авторы: Кобринский, Корендясев, Саламандра, Тывес


Текст
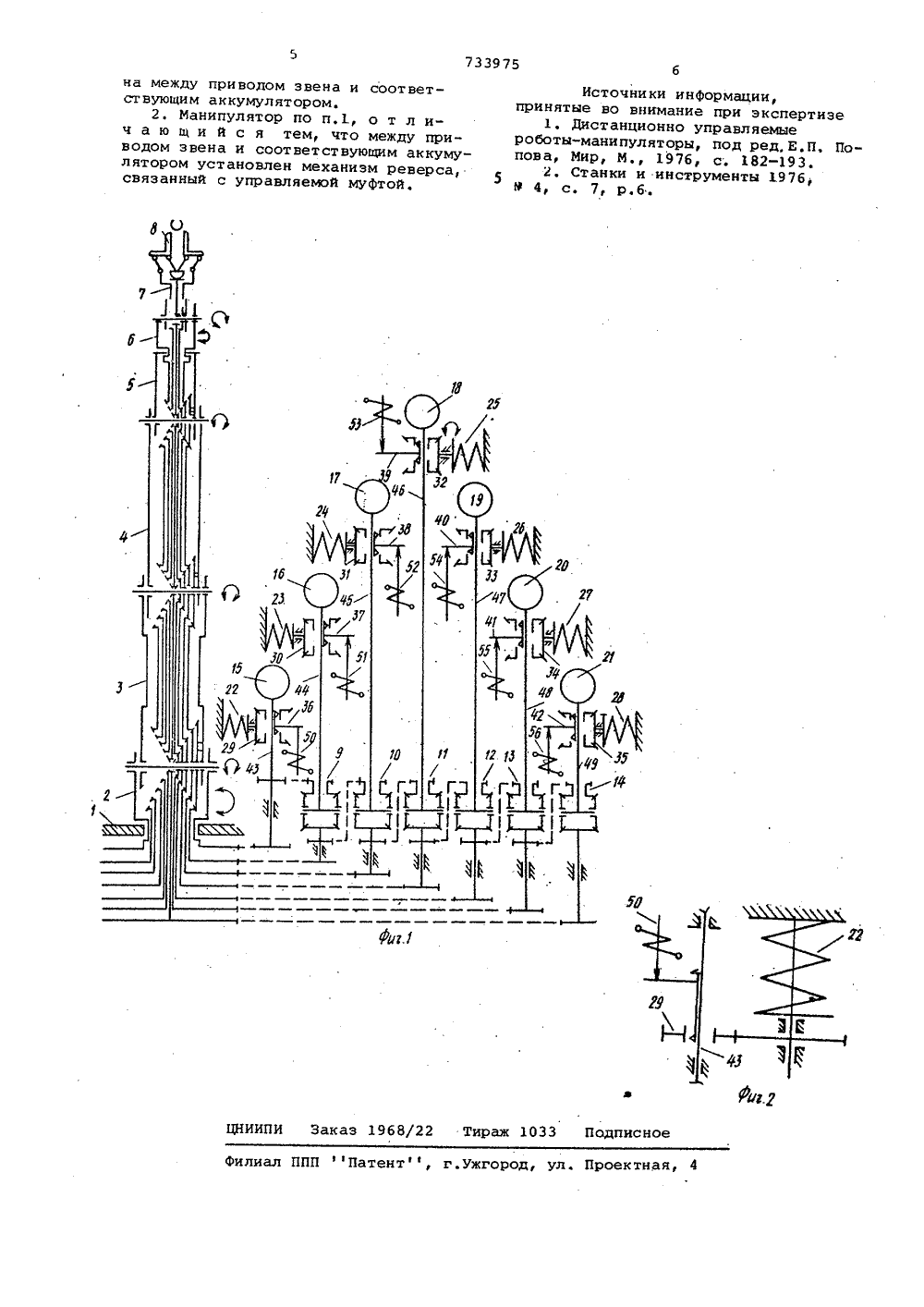
(щ 733975 Совз Советских Социалистических Республик(51) М. Кл. В 25 г 9/00 Государственный комитет СССР по делам изобретений и открытий(72) Авторы изобретения Государственный научно-исследовательский институт машиноведения им. акад. А.А. Благонравова(54) МАНИПУЛЯТОР С ПРОГРАММНЫМ УПРАВЛЕНИЕМ Изобретение относится к области машиностроения. и предназначено для механизации и автоматизации основных и вспомогательных операций в промышленности.Известен манипулятор с программным управлением, в котором содержатся шарнирно соединенные, звенья, привод каждого из которых образован моментным двигателем и тормозной муфтой, а управление осуществляется от программного устройства ло схеме следящего привода 11.Недостатком указанного манипулятора является значительная мощность двигателей при малой скорости перемещения звеньев.Наиболее близким решением иэ известных к предлагаемому является ма.- нипулятор с програюеным управлением, содержащий смонтированные на основании шарнирно соединенные звенья и кинематические цепи для осуществления относительных перемещений звеньев от двигателей 21.Недостаток укаэанного манипулятора заключается в том, что он не обладает достаточно высокими эксплуатационными качествами вследствие того, что инерционные свойства двигателя, а вернее, соотношение междумоментом инерции ротора двигателяи развиваемым им моментом, даже прииспользовании высокомоментных и малоинерционных. двигателей, не позволяют получить скорости перемещенийзвеньев, соизмеримые со скоростями,достигаемыми при использованиипневмо- и гидродвигателей и позиционной системы управления. Увеличение же мощности двигателей;зачастуюне приводит к положительному эффекту(к повышению быстродействия системы)в связи с еще более быстрым ростомотношения момента инерции роторадвигателя к развиваемому им моменту,Кроме того, вся накопленная механизмом на такте перемещений энергиягасится на тормозах, упорах и т.д.вызывая повышенные порой ударныенагрузки в конструкции, снижает долговечность системы.Целью изобретения является повышение эксплуатационных качеств путем увеличения скорости перемещениязвеньев, уменьшения мощности двигателей и увеличения долговечностиконструкции,Цель достигается тем, что в кинематических цепях привода перемещениязвеньев введены аккумуляторы механической энергии и управляемые муфты,каждая из которых установлена междуприводом звена и соответствующимаккумулятором, а также тем, что между5приводом звена и соответствующимаккумулятором установлен механизмреверса, связанный с управляемоймуфтой,На фиг, 1 изображена кинематическая схема предлагаемого манипулятора;на фиг, 2 - вариант выполненияаккумулятора и программно-управляемоймуфты.Манипулятор с программным управлением состоит из последовательноустановленных на основании 1 и шарнирно соединенных между собой звеньев2-8. Звено 2 посредством шарниракрепится на основании 1. Там же . 20установлены компенсирующий механизм,образованный рядом дифференциалов9-14 и индивидуальные дьигатели 1521, связанные со звеньями руки кинематическими цепями, выполненными, 25например, на конических передачах.Кроме того, на основании 1 установлены аккумулятОры механической энергии 22-28, выполненные, например,в виде пружины кручения, выходныезвенья аккумуляторов 29-35, Механизмы реверса 36-42 установлены междувыходными звеньями аккумуляторов икинематическими цепями приводов, вданном случае валами 43-49 двигателей 15-21. Программно-управляемыемуфты 50-56 также установлены междувыходными звеньями аккумуляторов икинематическими цепями приводов.В варианте подключения выходныхзвеньев аккумулятора к кинематичес Оким цепям привода, не содержащим механизма реверса (см.фиг.2), аккумулятор выполнен в виде пружины кручения. Аккумуляторами механическойэнергии могут быть оснащены приводыне всех звеньев, а только наиболеенагруженных, т.е. наиболее инерционных.Манипулятор с программным управлением работает следующим образом,В исходном положении (перед началом работы) аккумуляторы заряжены,т.е. пружины сжаты,их состояния зафиксированы, например, с помощьюспециальных тормозных устройств (начертежах не обозначено) . При поступ 55ленин команды на отработку задаваемых перемещений включаются в требуемом направлении двигатели 15-21, ик валам 43-49 подключаются выходныезвенья аккумуляторов 29-35 с помощью 60программно-управляемых муфт 50-56 так,что направление моментов от, аккумуляторов 22-28 совпадает с направлениемвращения валов 43-49 и с моментамидвигателей 15-21. При этом происходит Я интенсивный разгон системы, переход потенциальной энергии пропущенных аккумуляторов в кинематическую энергию звеньев, При отработке некоторой части требуемых перемещений программно-управляемые муфты по сигналам от системы управления переключают направление моментов от аккумуляторов, например, с помощью механизма реверса на обратное. При этом на второй части такта движения моменты от аккумуляторов не совпадают с направлениями скоростей валов 43-49 и с моментами двигателей 15-21. Происходит торможение системы, сопровождаемое зарядкой аккумуляторов 22-28 и обратным переходом кинематической энергии системы в потенциальную энергию пружин, Энергия двигателей 15-21 расходуется при этом на преодоление оси трения и на подзарядку аккумуляторов. В конце каждого такта состояние пружинных аккумуляторов опять фиксируется тормозными устрой ст вами.В варианте (см. фиг.2) для реверснрования момента аккумулятора используются собственные свойства коле бательной системыпружинный аккумулятор в . выходное звено аккумулятора. Собственная частота этой системы значительно выше частоты системы аккумулятор - манипулятор. Поэтому при отключении ведомого звена аккумулятора 29 от вала 43 двигателя 15 и при последующем его включении через половину периода собственных колебаний системы аккумулятор - выходное звено аккумулятора пружинный аккумулятор перейдет из фазы растяжения в фазу сжатия с незначительной потерей потенциала из-за неточности включения и наличия явления затухания в системе. Эти потери компенсируются энергией, поступающей в системуаккумулятор-манипуляторна интервале движения от двигателя этой системы.Формула изобретения1. Манипулятор с программным управлением, содержащий смонтированные на основании шарнирно соединенные звенья и кинематические цепи привода перемещений звеньев от двигателей, о т л и ч а ю щ и й с я тем, что, с целью повышения эксплуатационных качеств, путем увеличения скоростей перемещения звеньев, уменьшения мощности двигателей и увеличения долговечности конструкции, в кинематических цепях привода перемещения звеньев введены аккумуляторы механической энергии и управляемые луфты, каждая из которых установле733975 аж 1033 Падписно аказ 1968/22 П илиал ППП Патент, г.ужгород, ул. Проектная на между приводом звена и соответствующим аккумулятором,2. Манипулятор по п,1, о т л ич а ю щ и й с я тем, что между приводом звена и соответствующим аккумулятором установлен механизм реверса,связанный с управляемой муфтой. Источники информации, принятые во внимание при экспертизе1, Дистанционно управляеМые роботы-манипуляторы, под ред,Е.П, Попова, Мир, М., 1976, с. 182-193.2. Станки и инструменты 1976 м 4 с 7 р 6
СмотретьЗаявка
2573790, 30.01.1978
ГОСУДАРСТВЕННЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ МАШИНОВЕДЕНИЯ ИМ. АКАДЕМИКА А. А. БЛАГОНРАВОВА
КОБРИНСКИЙ АРОН ЕФИМОВИЧ, КОРЕНДЯСЕВ АЛЬФРЕД ИВАНОВИЧ, САЛАМАНДРА БОРИС ЛЬВОВИЧ, ТЫВЕС ЛЕОНИД ИОСИФОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятор, программным, управлением
Опубликовано: 15.05.1980
Код ссылки
<a href="https://patents.su/3-733975-manipulyator-s-programmnym-upravleniem.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор с программным управлением</a>
Рулевое управление прицепного звена транспортного средства

Номер патента: 1425124
Опубликовано: 23.09.1988
Авторы: Джавахян, Кочинян, Мамян
МПК: B62D 13/02
Метки: звена, прицепного, рулевое, средства, транспортного, управление
...управляемых колес 24 тягача 25 и поворотных тележек прицепов, блок 26 запаздывания и срав 50 нивающие элементы 27.Рулевое управление прицепного звена транспортного средства работает следующим образом.55При прямолинейном движении, ког. - да поворотная тележка 9 блокирована с дышлом 10 посредством электромагнитного толкателя 8, возникшее влияние прицепа 3 фиксируется импульсным датчиком 23 поворота поворотной тележки 9, импульсы которого передаются сравнивающему элементу 27. Последний без изменения количества импульсов посылает сигналы одновременно к электромуфтам 7, блокируя их, и электродвигателю 20 привода поворотных рычагов 17, который в соответствии с количеством полученных импульсов посредством тяги 21 синхронно...
Система программного управления

Номер патента: 516019
Опубликовано: 30.05.1976
Авторы: Райхман, Свидельский, Чухлиб
МПК: G05B 19/04
Метки: программного
...переходит в режим сложения за положением объекта управления, для чего из блока управления поступает командный сигнал, открывающий ключ 12 и замыкающий контур управления по позиции: фазовый детектор 13, ключ 12, блок суммирования 10, генератор 9 несущей частоты, фазовращатель 7, преобразователь 6 вал - напряжение. При этом на выходе фазового детектора 13, включенном в упомянутый контур, вырабатывается аналоговый сигнал, пропорциональный позиционной ошибке объекта управления. Этот сигнал, поступая через ключ 12 и блок суммирования 10 на вход генератора 9, вызывает изменение несущей частоты, что приводит к появлению напряжения на выходе частотного дискриминатора 5, которое через усилитель мощности 4 управляет исполнительным двигателем 3...
Устройство программного управления разогревом и охлаждением судового двигателя

Номер патента: 1160084
Опубликовано: 07.06.1985
Автор: Фридман
МПК: F02D 28/00
Метки: двигателя, охлаждением, программного, разогревом, судового
...детаях теля определяются градиентом ЭС(,Ф) ратур 1 згИ=,который при а1160084 4двига-можно получить допустимый диапазон темпе- изменения мощностейф ,-ЕС С) 3разогреминг( )мин 1,В установках с винтомфиксированногошага зависимость оборотов вала от мощности двигателя неоднозначна и зависит от загрузки судна, ветроволновых воздействий и т.д, Однако разброс этих зависимостей невелик и,как правило, руководствуются зависимостью и =19) для номинальнойзагрузки судна. В установках с винтом регулируемого шага, оборудованных регулятором мощности, зависимостьг= (л) однозначна. В этом случаеможно получить допустимый диапазонизменения оборотов а 1(Х,)1где= диод С- градиент тем ах о х-.ь ператур на стороне нагревания, 1(0,1,) - температура детали на...
Программно-временное устройство для автоматического управления и контроля системы смазки

Номер патента: 1374180
Опубликовано: 15.02.1988
Авторы: Акопян, Донцов, Ещенко, Карасев, Лапшин, Николаенко
МПК: G05B 19/10
Метки: программно-временное, системы, смазки
...одновибратор 20.Поступающий с выхода одновибратора 20 единичный импульс через элемент ИЛИ 32 переключает регистр 10 45 на второй разряд, При этом регистр О единичным сигналом с выхода Ъ своего второго разряда через открытый элемент И 25 переключает по входу 1 Я 35-триггер 18 в единичное состояние, Элементы И 29, 31 блоки-"50 руются нулевым сигналом с нулевого выхода КЯ-триггера 1 8, что приводит к остановке исполнительного механизма 6 привода насоса и самой обслуживаемой машины узлом блокировки ее55 главнсго привода 7.При нормальном режиме работы регистр 10 переключается на второй разряд сигналом от реле 4 давления через элемент И 22 и элемент ИЛИ 32 и по-прежнему поддерживает включенное состояние механизма 6 нулевым сигналом с...
Стенд для испытаний системы автоматического управления газотурбинного двигателя
Номер патента: 1616306
Опубликовано: 30.11.1994
Авторы: Гусельников, Колчин
МПК: G01M 15/00
Метки: газотурбинного, двигателя, испытаний, системы, стенд
СТЕНД ДЛЯ ИСПЫТАНИЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ с элементом управления геометрией проточной части двигателя, содержащий последовательно соединенные блок электронной модели двигателя и электропривод, подключенный к системе автоматического управления, систему преобразования расхода топлива, вход которой подключен к выходу системы автоматического управления газотурбинным двигателем, отличающийся тем, что, с целью повышения точности путем уменьшения динамической ошибки моделирования, он дополнительно содержит последовательно соединенные датчик положения элемента управления геометрией проточной части двигателя, преобразователь и первый блок коррекции электропривода, второй блок коррекции электропривода, вход...
Предыдущий патент: Устройство для загибки усиков замочных пластин
Следующий патент: Устройство для регулирования скорости подачи в лесопильных рамах
Случайный патент: Сигнализатор срабатывания предохранительной муфты