Устройство программного управления разогревом и охлаждением судового двигателя
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1160084
Автор: Фридман





Текст
. 85. Бю чик обустройсистемл и ч цель ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ ВТОРСКОМУ СВИДЕТЕЛЬСТВ(21) 3666 (22) 25. 1 (46) 07.0 (72) Я,И (53) 629 (56) .1. 1 ное упра установк (54)(57) УПРАВЛЕН СУДОВОГО;12.03(088.8)ыркин М.И. Автоматизированвление судовыми дизельнымиами. Л "Судостроение",1977УСТРОЙСТВО ПРОГРАММНОГОИЯ РАЗОГРЕВОМ И ОХЛАЖДЕНИЕМДВИГАТЕЛЯ, содержащее задатотов двигателя, программноево, связанное через следящуюс регулятором оборотов, о тю щ е е с я тем, что, сснирения функциональных возможностей оно дополнительно снабженодатчиком температуры двигателя, апрограммное устройство выполнено ввиде двух блоков вычисления соответственно верхней и нижней границдопустимого диапазона изменения температуры двигателя, блока сравнения,блока логики и коммутатора, причемтри входа блока сравнения подключенык коммутатору, а также соответственно к задатчику оборотов и через дваблока вычисления - к датчику температуры двигателя, а выход блока сравнения через блок логики связан с входомкоммутатора, выход которого подключенк следящей системе.11600Изобретение относится к автоматизации судовых энергетических установок, в частности к системам и устройствам управления мощностью и оборотами двигателя,и может быть использовано в системах дистанционного автоматизированного управления (ЛАУ) главными судовыми двигателями.Обеспечение плавного разогрева (охлаждения) двигателя необходимо 10 для уменьшения до допустимой величины термоперегрузок, которые в динамическом режиме набора (сброса) нагрузки могут значительно превышать термические нагрузки, наблюдаемые в стационарном режиме работы двигателя.,Известно устройство программного управления разогревом и охлаждением судового двигателя, содержащее задатчик оборотов двигателя, программное устройство, связанное через следящую систему с регулятором оборотов 11 .Недостатком известного устройства является то, что йрограмма разогре- д ва (охлаждения) выбирается из условия обеспечения разогрева холодного (или охлаждения горячего) двигателя и для частично разогретого двигателя является избыточно замедленной, что ухудшает маневренные качества судна.Цель изобретения - расширение функциональных возможностей. 84 2блока вычислениями на,.Лиг,З - схема блока логики; на Лиг,4 - схема коммутатора; на Жиг,5 - схема следящей системы.В состав устройства входят задатчик 1 оборотов, датчик 2 температуры поверхности двигателя, два блока 3 и 4 вычисления, определяющих значения минимальных и и максимальных воборотов, блок 5 сравнения, формирующий сигнал для блока 6 логики, который вырабатывает выходные сигналы, представленные в табл. 1, Коммутатор 7 вырабатывает сигналы для следящей системы 8, представленные в табл.2. Следящая система 8 связана с регулятором 9 оборотов.Блоки 3 и 4 вычисления по текущей температуре 1 внутренней стенки втулки двигателя определяют границы допустимого диапазона скачкообразного изменения оборотов ( "маке"мин )Блоки вычисления идентичны, каждый блок (Лиг,2) содержит девять резисторов 10-18, два диода 19 и 20, два операционных усилителя 21 и 22. Блок 6 логики содержит три элемента 23-25 типа 2 И, причем первый вход элемента 23 и второй вход элемента 4 - инверсные, Такая схема формирует комбинацию выходных сигналов У 1, У 2, УЗ в зависимости от входных сигналов Х 1, Х 2 согласно табл, 1.Поставленная цель достигается .тем, что устройство программного 35 управления разогревом и охлаждением судового двигателя, содержащее задатчик оборотов двигателя, программное устройство, связанное через следя- щую систему с регулятором оборотов, 4 О дополнительно снабжено датчиком температуры двигателя, а программное устройство выполнено в виде двух блоков вычисления соответственно верхней и нижней границ допустимого ф диапазона изменения температуры двигателя, блока сравнения, блока логики и коммутатора, причем три входа ,блока сравнения подключены к коммутатору, а также соответственно к за- Ю датчику оборотов и через два блока вычисления - к датчику температуры двигателя, а выход блока сравнения через блок логики связан с входом коммутатора, выход которого подклю- И чен к следящей системе,На Лиг.1 изображена Аункциональная схема устройства; на фиг.2 - схема В качестве коммутатора 7 используется многоканальный переключатель аналоговых сигналов, Следящая система 8 содержит (Лиг.5) сумматор 26, усилитель 27, электродвигатель 28, редуктор 29, датчик ЗО обратной связи. Элементы устройства соединены следующим образом. Вход регулятора 9 оборотов через следящую систему 8 соединен с выходом коммутатора 7, первый, второй и третий входы которого соединены с выходами блока 6 логики, а четвертый, пятый и шестой входы коммутатора 7 соединены с выходами первого 3 и второго 4 блоков вычисления и выходом задатчика 1 оборотов и одновременно с входами блока 5 сравнения, выходы блока 5 сравнения соединены с входами блока б логики, а вход датчика 2 температуры соединен с входами первого 3 и второго 4 блоков вычисления.Рассмотрим теоретические основы работы устройства.Термонапряжения в детаях теля определяются градиентом ЭС(,Ф) ратур 1 згИ=,который при а1160084 4двига-можно получить допустимый диапазон темпе- изменения мощностейф ,-ЕС С) 3разогреминг( )мин 1,В установках с винтомфиксированногошага зависимость оборотов вала от мощности двигателя неоднозначна и зависит от загрузки судна, ветроволновых воздействий и т.д, Однако разброс этих зависимостей невелик и,как правило, руководствуются зависимостью и =19) для номинальнойзагрузки судна. В установках с винтом регулируемого шага, оборудованных регулятором мощности, зависимостьг= (л) однозначна. В этом случаеможно получить допустимый диапазонизменения оборотов а 1(Х,)1где= диод С- градиент тем ах о х-.ь ператур на стороне нагревания, 1(0,1,) - температура детали на стороне нагрева;: С (,") - температура среды (средняя результирующая температура горячих газов); К, 1 - коэффициенты теплоотдачи (осредненный за цикл, максимальный) и теплопроводности.Заменив величину род г /Х=О на максимально допустимое значение градиента А, обозначив К /3 =В и учитывая, что при нагревании градиент считается отрицательным рияд Сдо, =-А) а нри охлаждении - положительным (гвд Сд, =+А), можно записатьЬ:-ЫВС(о,)Таким образом, способ управленияразогревом (охлаждением) двигателязаключается в том, что замеряют те-,ЗО кущую температуру нагреваемой стенки выбранной детали двигателя, вычисляют допустимый диапазон скачкообразных изменений оборотов вала; заданныеобороты подают на регулятор оборотовв качестве сигнала задания, если онилежат в допустимом диапазоне, верхнее (нижнее) значение допустимого диапазона оборотов подают на регулятороборотов в качестве сигнала задания,40 если заданные обороты лежат вьппе(ниже) допустимого диапазона, попредварительной оценке время наборанагрузки с 80 до 100 Х номинальныхоборотов и для прогретого двигателяуменьшится на порядок по сравнениюс временем нормальной программы разогрева, а время разгона судна - на15-251,и для охлаждения Яо)-А г мн ВТаким образом, задаваясь абсолют ной величиной максимально допустимого значения градиента А и зная тем пературу 1 (О,) нагреваемой поверхности детали, можно определить диапазон температур ( СгЮма гми) ф в котором любое изменение величины 1 не приводит к недопустимым 50 термонапряжениям. Очевидно, что изменением (О,.") изменяются и значения .сг(С) и С,(1) , т.е. выбор максимально допустимого воздействия производится в функции от реального те плового состояния двигателя. Учитывая, что мощность двигателя пропорциональна средней температуре газов,ве может значительно превыппать заданное допустимое значение(фгагСз )=А Известно также, что наибольшие значения градиента температур при разогреве возникают на стороне нагревания детали (Х=О).Рассмотрим выражение для граничных условий на стороне нагревания,или для нагреванияВС(О Я.)АС,Ю -юфф:-"-1 Следует отметить что при этомуправление разогревом (охлаждением)двигателя не является управлением наоснове имитирующей модели, посколькув процессе управления не решаетсяосновное уравнение теплопроводности,т.е. не используется модель объекта.Устройство работает следующим образом, 1160084Блоки 3 и 4 вычисления на основеинформации от датчика 2 температурывырабатывают сигналы, соответствующиеграницам диапазона максимально допустимого изменения оборотов двигателя с учетом его реального состояния. Если заданные обороты лежат в диапазоне Пкс - пдн блок 5 сравнениячерез блок 6 логики и коммутатор 7в соответствии с табл. 1 и 2 подключает к входу следящей системы 8сигнал оот задатчика 1. Еслизаданные обороты лежат вне диапазонами -и то к входу следящей системыМИ Н мас8 подключен сигнал с первого 3 или 15второго 4 блоков вычисления. Приэтом происходит разогрев ипи охлаждение двигателя и, следовательно, постепенное (в соответствии с разогревом (охлаждением) изменение диапазона п-ик, . Разогрев (охпаждение)прекращается, когда ооказывается в диапазонен-,4 а,п на входрегулятора 9 подается сигнал иБлоки 3 и 4 вычисления работавт 25следующим образом.Совокупность резисторов 10-12 и 14 иусилителя 21 представляют собой сум- .матор, выходной сигнал которого пропорционален сумме сигналов на выво- Зрдах резисторов 10 (смещение) и 14(вход). На вход сумматора подаетсясигнал от датчика 2 температуры. Величина смещения выбирается таким образом, что на выходе операционногоусилителя 21 блока 3 формируетсясигнал, пропорциональный величине е(И + с ), и на выходе усилителя 21блока 4 - сигнал, пропорциональныйвеличине (И+ с ), где 1, с, с - константы,Формирователь аппроксимированноймонотонной функции работает следующим образом,При увеличении входного сигнала до 4определенной величины открываетсядиод 19, что приводит к уменьшениюсуммарного сопротивления обратнойсвязи операционного усилителя 22 иуменьшению его коэффициента передачи.Дальнейшее увеличение входного сигнала приводит к открытию диода 20 и дальнейшему уменьшению коэффициента передачи усилителя 22. Величины резисторов 13, 15-18 и напряжения Ч, (Лиг,2) выбираются таким образом, что Аормйрователь реализует функцию ФСигнал задания подается на сумматор 26, который формирует сигнал разности заданного и действительного угла поворота вала следящей системы, Сигнал разности усиливается в усилителе 27 и подается на электродвигатель 28, вращение которого приводит к изменению сигнала датчика 30, и при достижении равенства сигнала от датчика 30 и сигнала задания вращение электродвигателя 28 прекращается,Таким образом достигается разогрев и охпаждение двигателя с учетом его реального теплового состояния, что позволяет улучшить маневренные качества судна без термоперегрузок двигателя.таблица 1Х 2 У 1 У 2 УЗ Х 1О 00Таблица 2 У 2 УЗ Сигналы на выходе 0 0 Ои макс 0ман1160084 Фиг1 мак с Л минпЗад ъ,: ИИПИ Заказ 371 Ь/30 Тираж 538 . Подписио илиал ППП "Патент", г.Ужгород, ул.Проектная, 4
СмотретьЗаявка
3666328, 25.11.1983
ОРГАНИЗАЦИЯ ПЯ А-3500
ФРИДМАН ЯКОВ ИЗРАИЛЕВИЧ
МПК / Метки
МПК: F02D 28/00
Метки: двигателя, охлаждением, программного, разогревом, судового
Опубликовано: 07.06.1985
Код ссылки
<a href="https://patents.su/5-1160084-ustrojjstvo-programmnogo-upravleniya-razogrevom-i-okhlazhdeniem-sudovogo-dvigatelya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство программного управления разогревом и охлаждением судового двигателя</a>
Устройство для регулирования размеров профиля круглого проката

Номер патента: 1196053
Опубликовано: 07.12.1985
Автор: Гагаринов
МПК: B21B 37/18
Метки: круглого, проката, профиля, размеров
...в блоке 3 вычисления поступают на входыблока, 15 вычисления дисперсии температуры подката.После выхода заднего конца подката из-под измерителя 1 температурыподката сигнал, пропорциональныйоценке дисперсии температуры подката, с выхода блока 15 поступает напервый выход блока 16 умножения. Навторой вход последнего поступает сигнал, пропорциональный начальному передаточному коэффициенту чистовойгруппы стана, задаваемый блоком 17задания номинальных значений. Навыходе блока 16 умножения выдаетсясигнал, пропорциональный полученному значению вертикального диаметра профиля, коррелированному с температурой подката. К выходному сигналу блока 16 умножения в алгебраическом сумматоре 18 добавляетсясигнал, пропорциональный...
Устройство декодирования тональных сигналов

Номер патента: 1570034
Опубликовано: 07.06.1990
Авторы: Волошин, Калиниченко, Попов
МПК: H04Q 9/00
Метки: декодирования, сигналов, тональных
...Если условия всех проверок выполняются (что соответствует установке на выходе счетчика 5 кода числа.К-(0+1), то на выходе дешифратора 14, являющемся тактовым выходом декодера, Формируется сигнал, свидетельствующий о приеме частоты, код которой установлен на информационных выходах декодера (выходах регистра 1 3) . Появление сигнала логической на тактовом выходе вызывает Формирование сигнала логической "1" на выходе второго элемента ИЛИ 21, которым декодер .возвращается в исходное состояние: первыйсчетчик 4 и распределитель 17 по их вторым входам (Р-входам) сбрасываются, а реверсивный счетчик 5 переустанавливается, формирование сигнала начальной установки на выходе второго элемента ИЛИ 21 происходит и в случае невыполнения одного из...
Датчик оборотов двигателя блока вращающихся головок

Номер патента: 570841
Опубликовано: 30.08.1977
Автор: Миронов
МПК: G01P 3/68
Метки: блока, вращающихся, головок, датчик, двигателя, оборотов
...датч,к работает следующимобразом.В процессе записи и воспроизведения сигналограммы скоростной двигатель 1 приводит во5 вращение диск. Скорость магнитной головки4 относительно магнитной ленты 7 составляет41 м/сек и более. Вследствие этого при соприкосновении магнитной головки и ленты температура рабочей поверхности магнитной го 10 ловки мгновенно достигает 700 С,Вследствие того, что все нагретые тела являются источником инфракрасного излучения,интенсивность которого повышается с увеличением температуры, при соприкосновении15 магнитной головки и ленты происходит мгновенное повышение интенсивности инфракрасного излучения с рабочей поверхности магнитной головки, Это влечет за собой изменениерабочего параметра приемника 5 инфракрас 20 ного...
Устройство для определения зависимости мощности двигателя от числа оборотов

Номер патента: 763706
Опубликовано: 15.09.1980
МПК: G01L 3/24
Метки: двигателя, зависимости, мощности, оборотов, числа
...одновременно включающий зажигание, блок 9управления дроссельной заслонкой,который приводит заслонку в открытоеположение, и вычислительный блок,10,который, в свою очередь, управляетсяблоком синхронизации через программный переключатель 5 (для дизельныхдвигателей в момент достижения заданной скорости одновременно включаются максимальная подача топлива ивычислительный блок 10).,С этого момента двигатель начинает разгоняться, а счетчики вычислительного блока 10 фиксируют последовательно время прохождения колен 76370640 чатым валом одинаковых угловых интервалов, задаваемых блоком 4 синхронизации. Сначала импульсы от генератора б через программный переключатель5 поступают на вход первого счетчика, на выходе которого к концу углового...
Система регулирования температуры воздуха в теплице
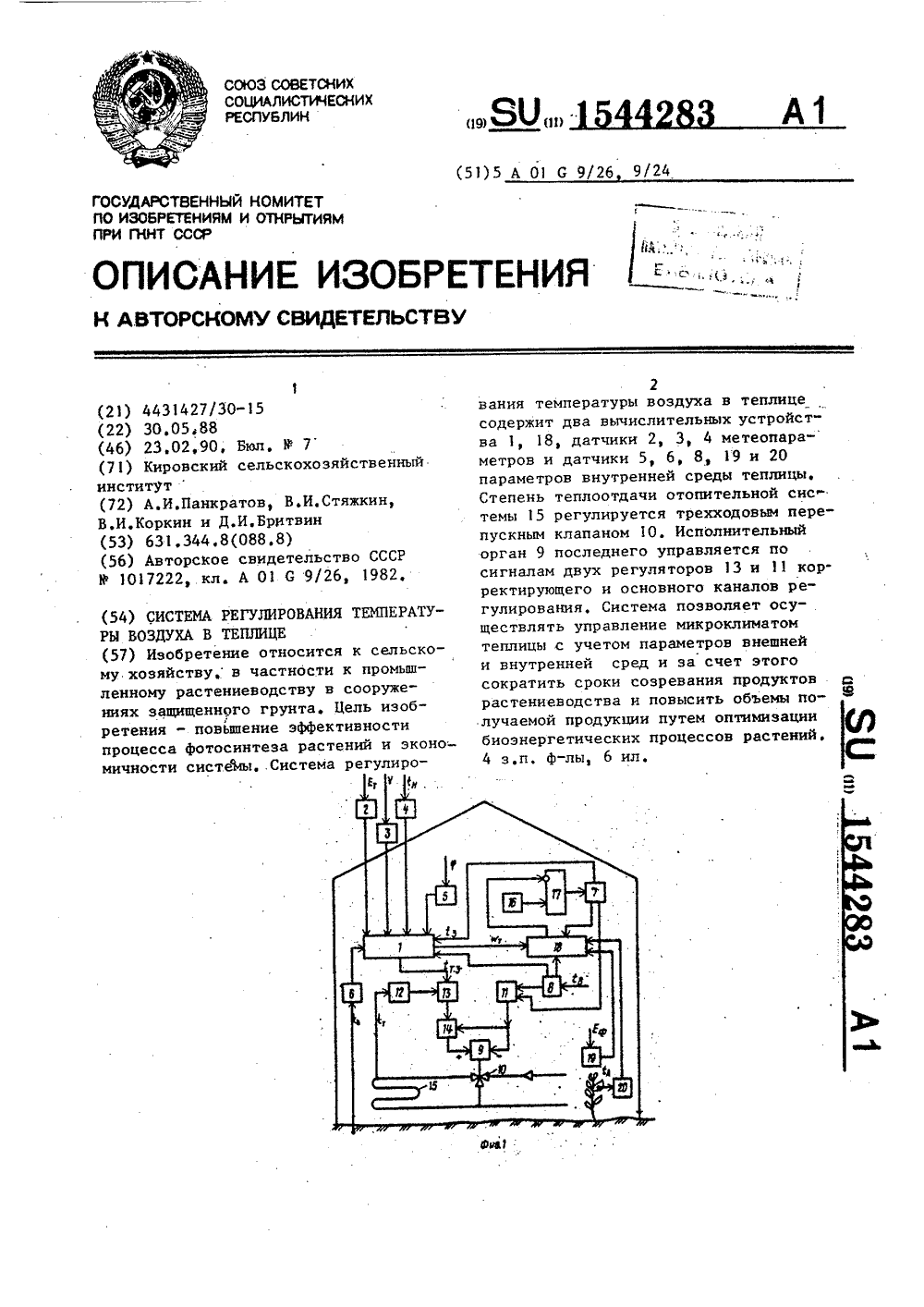
Номер патента: 1544283
Опубликовано: 23.02.1990
Авторы: Бритвин, Коркин, Панкратов, Стяжкин
Метки: воздуха, температуры, теплице
...температуры С теплоносителяотопительной системы 15, Если текущее значение температуры й теплоноТсителя обеспечивает температуру В 25воздуха в соответствии с предписанием задатчика 7, сигнал на выходе вычислительного устройства 1 равен нулю.При неравенстве этих температур, аименно когда ВВ, сигнал на выходе 30устройства 1 положительный, через второй регулятор 13 корректирующего канала регулирования он поступает навход электронного ключа 14, последнийоткрывается и появившимся вследствиеэтого выходом первого электронногоключа 14 трехходовой перепускной кла-.пан 10 исполнительным органом 9 перемещается в положение, при которомподача теплоносителя (горячая вода)в отопительную систему 15 увеличивается, При этом температура теплоносителя...
Предыдущий патент: Регулятор с переменным передаточным отношением для дизеля с турбонаддувом
Следующий патент: Поршень двигателя внутреннего сгорания
Случайный патент: Устройство для обработки кромок труб под сварку