Система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 516019
Авторы: Райхман, Свидельский, Чухлиб

Текст
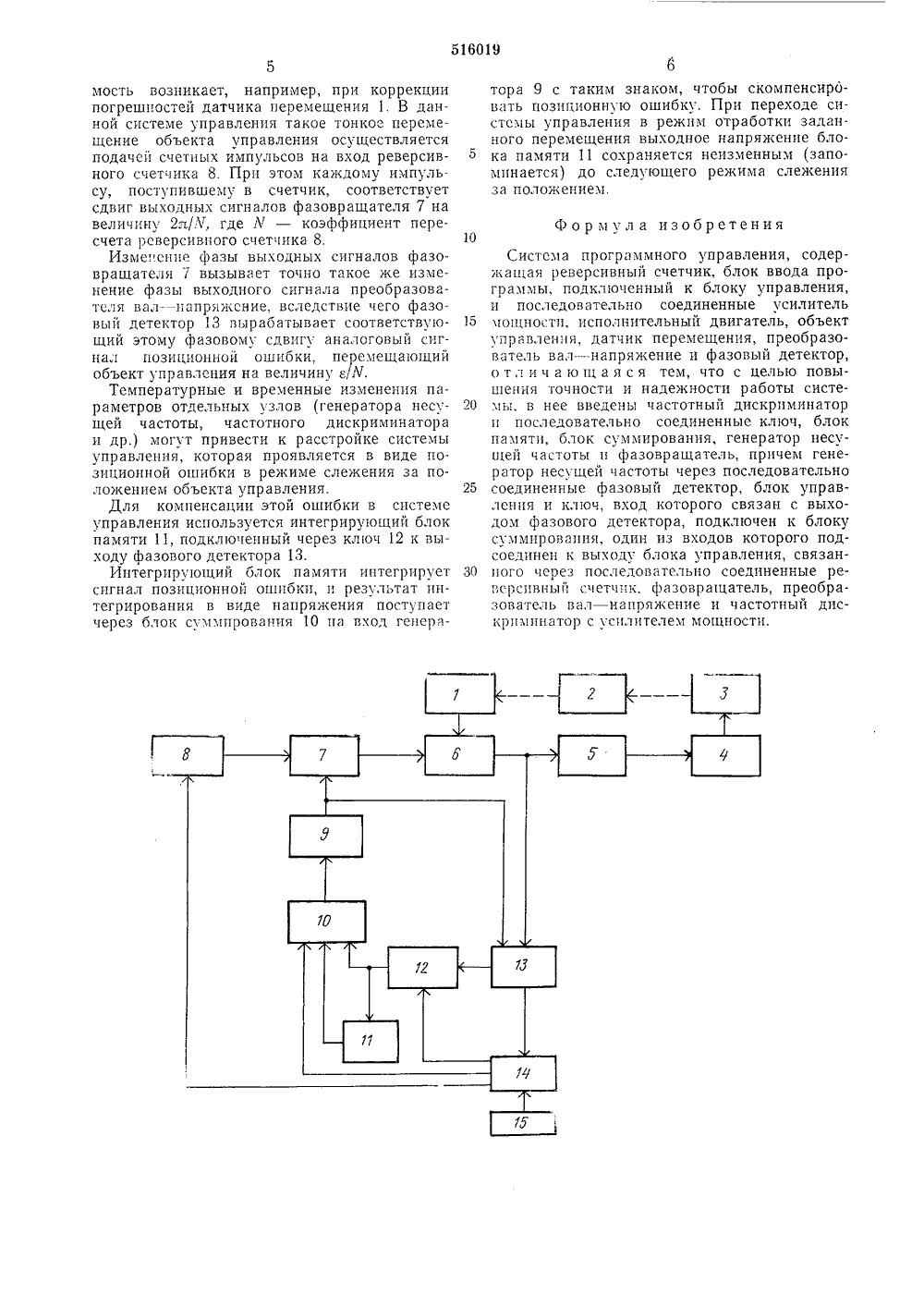
нала преобразователя 6 вызывает появле ие напряжения соответствующей полярности на выходе частотного дискриминатора 5, настроенного на среднее значение частоты сигнала генератора 9, т. е. на то значение частоты сигнала, которое генерируется генератором 9 при отсутствии управляющего напряжения на его входе. Выходное напряжение частотного дискриминатора 5 через усилитель мощности 4 поступает на исполнительный двигатель 3, который начинает перемещать объект управления 2 в заданном направлении.Выходной сигнал преобразователя б принимает виде=вз 1 п (со,+Ла)У+2-, - 2-.х, х)сгде 1 - время;оо - среднее значение несущей частоты(частота настройки дискриминатора 5);Х, - координата положения объектауправления 2 в момент начала движения;в - период меры датчика перемещения 1;Х(1) - текущее значение координатыобъекта управления 2.Таким образом, при движении объекта управления 2 частота выходного сигнала преобразователя вал - напряжение уменьшается на величинуй - . 2- = 2 где о - мгновенная скорость объекта управления 2.Так как датчик перемещения 1, преобразователь вал - напряжение, частотный дискриминатор 5, усилитель мощности 4, исполнительный двигатель 3 и объект управления 2 образуют замкнутый контур статического регулирования, установившаяся скорость перемещения объекта управления 2 поддерживается неизменной, при этом величина ее определяется величиной расстройки Ло несущей частоты сигнала генератора 9.Одновременно фазовый детектор 13 вырабатывает информацию о перемещении объекта управления 2 в виде счетных импульсов, которые поступают в блок управления 14. Величина отработанного перемещения непрерывно сравнивается в блоке управления с заданным перемещением, и при подходе объекта управления к заданной координате величина управляющего напряжения, поступающего из блока управления через блок суммирования 10 на вход генератора 9, плавно или ступенчато уменьшается, что вызывает соответствующее уменьшение расстройки Ла несущей частоты и, следовательно, уменьшение скорости перемещения объекта управления.По окончании отработки перемещения управляющее напряжение на выходе блока управления становится равным нулю, и система40 45 50 55 60 65 что вызывает появление напряжения на выходе частотного дискриминатора 5. Это напряжение приводит в движение исполнительный двигатель 3 так, чтобы погасить скорость объекта управления.Таким образом, в режиме слежения за положением объекта управления в системе программного управления действуют два контура управления: контур управления по позиционной ошибке - фазовый детектор 13, ключ 12, блок суммирования 10, генератор 9 несущей частоты, фазовращатель 7, преобразователь вал - напряжение, частотный дискриминатор 5, усилитель мощности 4, исполнительный двигатель 3, объект управления и датчик перемещения; и контур управления по первой производной позиционной ошибки - преобразователь вал - напряжение, частотный дискриминатор 5, усилитель мощности 4, исполнительный двигатель 3, объект управления 2 и датчик перемещения 1,Преимуществом предлагаемой системы программного управления является возможность осуществления перемещения объекта управления 2 на величину, меньшую, чем дискретность отсчета перемещения. Такая необходи 5 10 15 20 25 30 35 программного управления переходит в режим сложения за положением объекта управления, для чего из блока управления поступает командный сигнал, открывающий ключ 12 и замыкающий контур управления по позиции: фазовый детектор 13, ключ 12, блок суммирования 10, генератор 9 несущей частоты, фазовращатель 7, преобразователь 6 вал - напряжение. При этом на выходе фазового детектора 13, включенном в упомянутый контур, вырабатывается аналоговый сигнал, пропорциональный позиционной ошибке объекта управления. Этот сигнал, поступая через ключ 12 и блок суммирования 10 на вход генератора 9, вызывает изменение несущей частоты, что приводит к появлению напряжения на выходе частотного дискриминатора 5, которое через усилитель мощности 4 управляет исполнительным двигателем 3 так, что объект управления начинает перемещаться в направлении уменьшения позиционной ошибки.Важным достоинством системы программного управления является то, что в режиме сложения, кроме позиционной ошибки, вырабатывается еще и сигнал первой производной позиционной ошибки объскта управления, что существенно повышает качество позиционирования последнего, Формирование сигнала первой производной позиционной ошибки осуществляется частотным дискриминатором 5 из сигнала преобразователя вал в напряжен. Если вследствие каких-либо внешних механических возмущений подвижный элемент объекта управления начинает перемещаться, частота выходного сигнала преобразователя 6 изменяется и оказывается равнойО: о)о+ -2г хжмость возникает, например, при коррекции погрешностей датчика перемещения 1. В данной системе управления такое тонкое перемещение объекта управления осуществляется подачей счетных импульсов на вход реверсивного счетчика 8. При этом каждому импульсу, поступившему в счетчик, соответствует сдвиг выходных сигналов фазовращателя 7 на величину 2 л/Л, где У - коэффициент пересчета реверсивного счетчика 8,Изме,.ение фазы выходных сигналов фазовращателя 7 вызывает точно такое же изменение фазы выходного сигнала преобразователя вал - напряжение, вследствие чего фазовый детектор 13 вырабатывает соответствующий этому фазовому сдвигу аналоговый сигнал позиционнои ошибки, перемещающий объект управления на величину еУ,Температурные и временные изменения параметров отдельных узлов (генератора несущей частоты, частотного дискриминатора и др.) могут привести к расстройке системы управления, которая проявляется в виде позиционной ошибки в режиме слежения за положением объекта управления.Для компенсации этой ошибки в системе управления используется интегрирующий блок памяти 11, подключенный через ключ 12 к выходу фазового детектора 13.Интегрирующий блок памяти интегрирует сигнал позиционной ошибки, и результат интегрирования в виде напряжения поступает через блок суммирования 10 па вход генератора 9 с таким знаком, чтобы скомпенсировать позиционную ошибку. При переходе системы управления в режим отработки задан.ного перемещения выходное напряжение блока памяти 11 сохраняется неизменным (запоминается) до следующего режима слежения за положением.Фор мул а изобретения10Система программного управления, содержащая реверсивный счетчик, блок ввода программы, подключенный к блоку управления, и последовательно соединенные усилитель 15 мощности, исполнительный двигатель, объектуправления, датчик перемещения, преобразователь вал - напряжение и фазовый детектор, о тл и ч а ю щ а я с я тем, что с целью повышения точности и надежности работы систе мы, в нее введены частотный дискриминатори последовательно соединенные ключ, блок памяти, блок суммирования, генератор несущей частоты и фазовращатель, причем генератор несущей частоты через последовательно 25 соединенные фазовый детектор, блок управления и ключ, вход которого связан с выходом фазового детектора, подключен к блоку суммирования, один из входов которого подсоединен к выходу блока управления, связан ного через последовательно соединенные ревсрсивный счетчик, фазовращатель, преобразователь вал - напряжение и частотный дискриминатор с усилителем мощности.
СмотретьЗаявка
2023781, 22.04.1974
ПРЕДПРИЯТИЕ ПЯ Р-6495
РАЙХМАН ЯКОВ АРОНОВИЧ, СВИДЕЛЬСКИЙ АРНОЛЬД ПЕТРОВИЧ, ЧУХЛИБ ВЛАДИМИР ИВАНОВИЧ
МПК / Метки
МПК: G05B 19/04
Метки: программного
Опубликовано: 30.05.1976
Код ссылки
<a href="https://patents.su/3-516019-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления</a>
Функциональный преобразователь напряжения в частоту

Номер патента: 1094145
Опубликовано: 23.05.1984
Авторы: Василенко, Захаров, Комлев, Малафеев, Михайлов, Самойлов
МПК: H03K 13/20
Метки: функциональный, частоту
...операционного усилителя 9.4), пороговый элемент 10 ( 10, 1 - резистор на входе операционного усилителя 10,2, 10.3 и 10.4 - делитель напряжения в цепи положительной обратной связи), элемент НЕ 11.К выходу источника 1 преобразуемого сигнала подключены инвертор 2 и первый интегратор 3, к выходу инвертора 2 подключен второй интегратор 4, первый 5 и второй 6 ключи шунтируют интегрирующие емкости соответственно первого 3.2 и второго 4.2 конденсаторов, выходы первого 3 и второго 4 интеграторов через третий 7 и четвертый 8 ключи соответственно подключены к резисторам 9. 1 и 9.2 на входе третьего интегИз этого соотношения следует, что статическая характеристика известного преобразователя не точно соот ветствует корню квадратному от величины...
Программный блок для позиционных систем программного управления

Номер патента: 408274
Опубликовано: 01.01.1973
Авторы: Бекленищев, Соболев
МПК: G05B 19/08
Метки: блок, позиционных, программного, программный, систем
...реле переключения и останова.Это позволяет повысить надежность работы блока.На чертеже показана функциональная схема описываемого блока,Схема содержит штеккерный программоноситель 1 и 2, дополнительный штеккерный Транспортный механизм на втором такте переключателя устройства (щетки 8, и 8, искателя замыкают ламели 92 и 10 з соответствен но), отрабатывает подпрограмму операций напозиции, определяемой датчиком 6, (программный блок операций на чертеже не показан), и после ее отработки получает команду на перемещение к датчику 6,. При подходе транс портного механизма к заданной позиции возбуждается датчик 6 з, и реле 5 з оказывается включенным по цепи шина 12 ( - ) - щетка 8, - ламель 10 з - диод 15, - программоноситель 1, -...
Преобразователь напряжения в частоту

Номер патента: 1266004
Опубликовано: 23.10.1986
Авторы: Галиев, Маннанов, Штейнберг
МПК: H03M 1/50
Метки: частоту
...выходе интегратора 6 напряжение начинает расти и при достижении порогового уровня срабатывает пороговое устройство 7, которое дает команду на ключевое устройство, в результате чего изменяется направление интегрирования. Блок 13 формирования импульса расчетной задержки синхронизируется пороговым устройством 7 и формирует короткий импульс с расчетной задержкой относительно импульса синхронизации, который поступает на второй вход формирователя 8 импульсов (фиг.2), Если под действием внешней среды, например, изменяется постоянная времени интегратора 6, пороговое устройство 7 срабатывает раньше расчетного времени, то формирователь 8 импульсов вырабатывает ряд положительных импульсов, длительность которых зависит от изменения постоянной...
Способ преобразования перемещение-напряжение

Номер патента: 1663398
Опубликовано: 15.07.1991
Авторы: Конаков, Лапшов, Любомиров
МПК: G01B 7/00
Метки: перемещение-напряжение, преобразования
...магнитоп ровода 2 хмь= хрпь, и подведении синусоидального напряжения питания Оп от внешнего источника (на чертеже не показан) к секциям обмотки 3 возбуждения, на секциях измерительных обмоток 4 появляются выходные сигналы, сдвинутые по фазе на 180 С за счет включения секций измерительных обмоток. С целью повышения линейности выходной характеристики датчика, а следовательно, и точности преобразования между выходными сигналами О 1 и О 2(х) секций измерительных обмоток 4 устанавливается в начале диапазона измерения угол сдвига фаз, отличающийся от 180 С на угол а (х,) путем подбора элементов фаэовращателя 10 и положения металлического стержня 9, Положением стержня 9 и подбором витков первой секции измерительной обмотки 4 в датчике...
Фазочувствительный преобразователь напряжения одной частоты в напряжение другой частоты

Номер патента: 164058
Опубликовано: 01.01.1964
Автор: Пинчук
МПК: H02M 5/27
Метки: напряжение, одной, фазочувствительный, частоты
...блока 1 и 2 скольцевыми мостами из вентилей, в цепи которых включены сопротиглеция, пуцтировгц 1- 15 ье конденсаторами.Этц копдецсаторы заряжаются от соответствующего источника, заведомо болыцего, чем сигцалыое, опорного напряжения (сили Ь,о) таким ооразом, что создают на за жимах Всцтилеи дополцительцое автохзтцческое запирающее смецение задашой велпчицы Е, которое продолкает запирать вецтцли и в то время, когда обратцое (запиряОщее 1 зцачепие опорного напряжения мало илц пе реходит через пуль, Пока величина опорногоцапряженця Го це возрастет до заданой величины, вентили для тока сигнала заперты.После достижения за аццой велцчцы соответствуощие вентили отпираются, В рсзуль тяте ця вь 1 ходс Олок 1 1 оудет получаться"Ьпсии/...
Предыдущий патент: Самонастраивающаяся система объектов управления
Следующий патент: Способ контроля положения якоря в электромагнитных механизмах
Случайный патент: Гидравлическое сигнальное устройство загрязненности фильтра