Устройство для программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
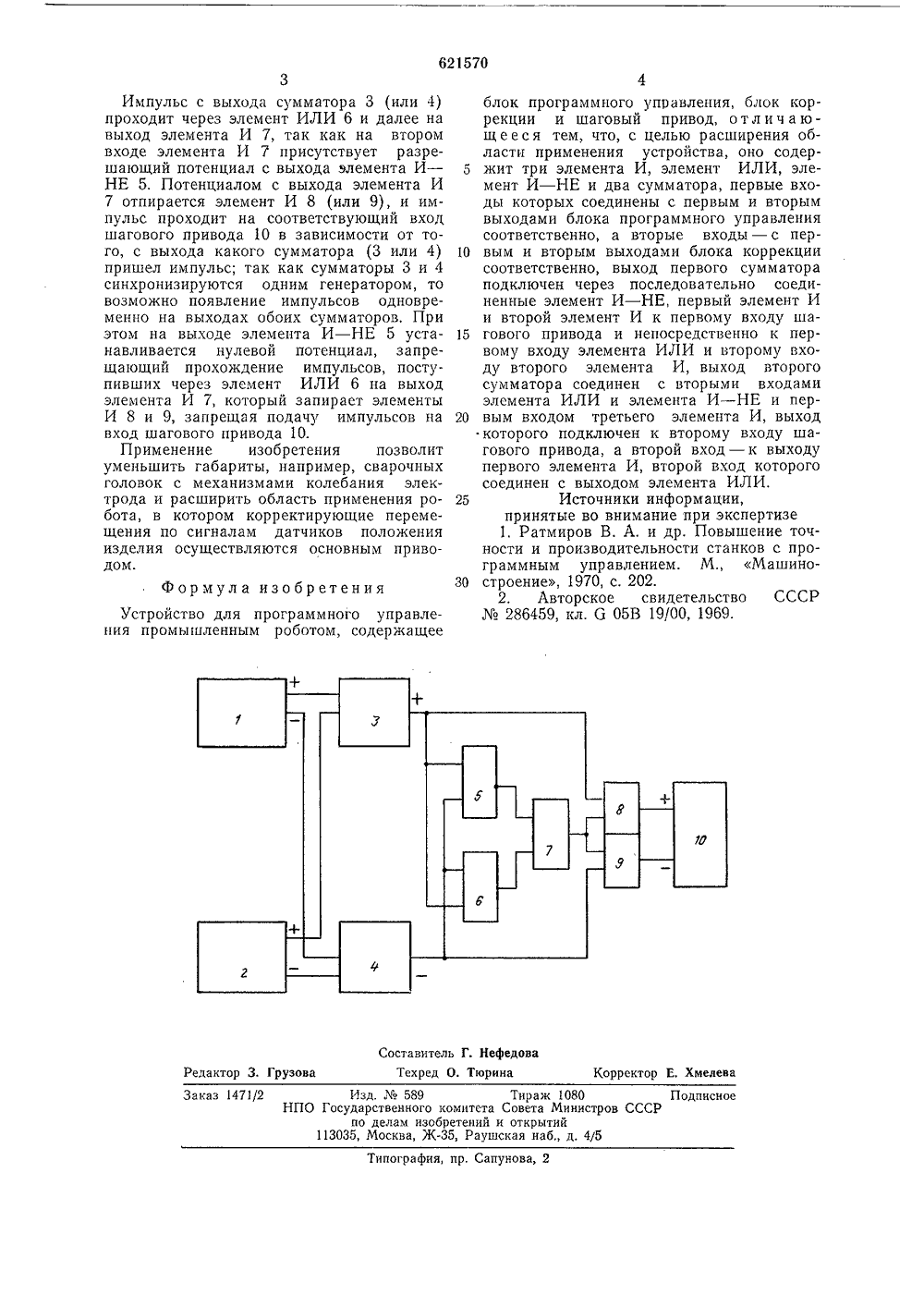
и) 62 БУО ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(51) М. 251 90 с присоединением заявкиГосударственный комите 1 Совета Министров СССР по делам изобретени(45) Дата опубликования описания 03,08.7 2) Авторы изобретен н Г. И. Сергацкий С. Лихош 71) Заявитель рдена Ленина и ордена Трудового Красного Знамени инстит электросварки им. Е, О, Патона(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕ ПРОМЫШЛЕННЫМ РОБОТОМ руктурнаяго управ введены три емент И - НЕ Изобретение относится к области программного управления промышленными роботами и может быть использовано для управления промышленным роботом с шаговым приводом, воспринимающим сигналы программы и сигналы коррекции положения рабочего органа в зависимости от технологических условий.Известны устройства для программного управления промышленным роботом. 10Известно устройство 11, содержащее блоки программного управления, шаговый привод и дополнительный привод. Недостаток этого устройства заключается в его сложности. 15Наиболее близким техническим решением к изобретению является устройство 21, содержащее блок программного управления, блок коррекции и шаговый привод. 20Однако это устройство не обеспечивает возможности суммирования и отработки двух независимых последовательностей импульсов, несущих информацию программы и информацию корректирующего органа,Цель изобретения - расширение области применения устройства.Для этого в устройствоэлемента И, элемент ИЛИ, эл 30 и два сумматора, первые входы которых соединены с первым и вторым выходами блока программного управления соответственно, а вторые входы - с первым и вторым выходами блока коррекции соответственно. Выход первого сумматора подключен через последовательно соединенные элемент И - НЕ, первый элемент И и второй элемент И к первому входу шагового привода и непосредственно к первому входу элемента ИЛИ и второму входу второго элемента И. Выход второго сумматора соединен с вторыми входами элемента ИЛИ и элемента И - НЕ и первым входом третьего элемента И, выход которого подключен к второму входу шагового привода, а второй вход в к выходу первого элемента И, второй вход которого соединен с выходом элемента ИЛИ. На чертеже представлена стсхема устройства для программно ления промышленным роботом.Она содержит блок 1 программ ног управления, блок 2 коррекции, первый 3второй 4 сумматоры, элемент И - НЕ 5 элемент ИЛИ 6, первый 7, второй 8 и тре тий 9 элементы И, шаговый привод 10.Устройство работает следующим обра зом,621570 30 Формула изобретения Составитель Г. Нефедова Техред О, ТюринаКорректор Е. Хмелева Редактор 3. Грузова Заказ 1471/2 Изд.589 Тираж 1080 Подписное НПО Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская набд. 4/5Типография, пр. Сапунова, 2 3Импульс с выхода сумматора 3 (или 4) проходит через элемент ИЛИ 6 и далее на выход элемента И 7, так как на втором входе элемента И 7 присутствует разрешающий потенциал с выхода элемента И - 5 НЕ 5. Потенциалом с выхода элемента И 7 отпирается элемент И 8 (или 9), и импульс проходит на соответствующий вход шагового привода 10 в зависимости от того, с выхода какого сумматора (3 или 4) 10 пришел импульс; так как сумматоры 3 и 4 синхронизируются одним генератором, то возможно появление импульсов одновременно на выходах обоих сумматоров, При этом на выходе элемента И - НЕ 5 уста навливается нулевой потенциал, запрещающий прохождение импульсов, поступивших через элемент ИЛИ 6 на выход элемента И 7, который запирает элементы И 8 и 9, запрещая подачу импульсов на 20 вход шагового привода 10.Применение изобретения позволит уменьшить габариты, например, сварочных головок с механизмами колебания электрода и расширить область применения ро бота, в котором корректирующие перемещения по сигналам датчиков положения изделия осуществляются основным приводом. Устройство для программного управления промышленным роботом, содержащее блок программного управления, блок коррекции и шаговый привод, о т л и ч а юще еся тем, что, с целью расширения области применения устройства, оно содержит три элемента И, элемент ИЛИ, элемент И - НЕ и два сумматора, первые входы которых соединены с первым и вторым выходами блока программного управления соответственно, а вторые входы - с первым и вторым выходами блока коррекции соответственно, выход первого сумматора подключен через последовательно соединенные элемент И - НЕ, первый элемент И и второй элемент И к первому входу шагового привода и непосредственно к первому входу элемента ИЛИ и второму входу второго элемента И, выход второго сумматора соединен с вторыми входами элемента ИЛИ и элемента И - НЕ и первым входом третьего элемента И, выход которого подключен к второму входу шагового привода, а второй вход - к выходу первого элемента И, второй вход которого соединен с выходом элемента ИЛИ.Источники информации,принятые во внимание при экспертизе 1, Ратмиров В. А. и др, Повышение точности и производительности станков с программным управлением. М Машиностроение, 1970, с. 202.2. Авторское свидетельство СССР286459, кл. 6 05 В 19/00, 1969.
СмотретьЗаявка
2411734, 04.10.1976
ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА АН УКРАИНСКОЙ ССР
ЛИХОШВА АЛЕКСАНДР СЕМЕНОВИЧ, СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: программного, промышленным, роботом
Опубликовано: 30.08.1978
Код ссылки
<a href="https://patents.su/2-621570-ustrojjstvo-dlya-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления промышленным роботом</a>
Пропорционально-интегрально-дифференциальный регулятор
Номер патента: 593676
Опубликовано: 15.02.1978
МПК: G05B 11/36
Метки: пропорционально-интегрально-дифференциальный, регулятор
...из усилителя14 и резисторов 15 - 19,1Лифференцирувщий блок 4 состоит.из усилителя 20, конденсаторов 21 и 22 и резистора.23. в качестве элементов обратной:связи.Интегрирующий блок 2 состоит из усилителя 24, конденсатора 25 и.резистора 26;Потенциометры 97,. 28, 29 служат для установки динамических параметров регулятора.В состав регулятора входят третий и четвер.тый элементы обратной связи - резисторы 30,31 и кнопка 32 ручного управления.Устройство работает следующим образом.Входной сигнал; регулятора Х, подается надифференцирующийблок 4:и на сумматор 5,где он сравнивается с. заданным значением Х,Ошибка регулирования Е иодается на пропор.циональный блок 3 и.иапервый. элемент обратной связи 7.30.Выходной сигнал усилителя 9,...
Способ сверления отверстий с наклонным входом-выходом и устройство для его осуществления

Номер патента: 961863
Опубликовано: 30.09.1982
МПК: B23B 35/00
Метки: входом-выходом, наклонным, отверстий, сверления
...в начальный момент выхода одной режущей кромки до максимальной величины при полном ее выходеи затем уменьшается до нуля по меревыхода второй режущей кромки. Скорости соприкасающихся точек режущейкромки инструмента 1 и опоры 3,служащей для приложения уравновешивающих усилий, равны между собой.В предлагаемом устройстве инструмент 1 направляют по кондукторнойвтулке 4, закрепленной в сборном корпусе 5. С нерабочей режущей кромкойинструмента 1 (фиг. 5) контактируетопора, выполненная в виде упорногокольца б, установленного в проточкедвух роликов 7, посаженных на подшипниках 8 качения в ползушке 9.Ползушка выполнена с возможностьюосуществления возвратно-поступательных перемещений на колонках 10, запрессованных в основании 11, причемна...
Способ диагностирования состояния входов-выходов транзисторно-транзисторных логических устройств

Номер патента: 1735850
Опубликовано: 23.05.1992
Авторы: Анкудинов, Беленький, Шепелев
МПК: G06F 11/00
Метки: входов-выходов, диагностирования, логических, состояния, транзисторно-транзисторных, устройств
...мультиплексор). Пля наглядности следуе показать не толькоразность токов, но и величины самихтоков, протекающих в шине питания и, общей шине объекта диагностирования,5 1735850На первом этапе процесса диагнос - будет тирования, т.е. при отключенных вы- табл. ходах ИС;Е 155 КП 2 исправный обьект иметь реакции, приведенные в1. Таблица 1 Реакции 314 15 1 ка Г, ка 31,а 1 136,0 36,0 0,0 1 1 1 30 4 29 31 Эбе 2 3511 1 е Эбв 2 35 в 11 5 1 1 1,0 1 1 1 .1 1 6 1 1 10 1 1 1 1 1 1 1 7 1 1 1 1. О 1 т1,. ф 8 1 1 11 1 0 1 11 1 30,4 29,3 1,1 91 11 1 1 0 1 11 Э 6,2 35,1 1,1 1 О 1 1 1 1 1 1 1 1 01 1 -"- и и 1 1 .1 1 1 1 1 1 1 0 1 1 и.121Ои 13 1 11 . 1 1 1 1 11 0 -"- -ие Ф П р н и е ч а н и е. 1, - величина тока, протекающего в шине питания,1 ф -...
Устройство для моделирования электрических нелинейных элементов с односторонней проводимостью

Номер патента: 1737469
Опубликовано: 30.05.1992
Авторы: Бондаренко, Войтенко, Резниченко
МПК: G06G 7/62
Метки: моделирования, нелинейных, односторонней, проводимостью, электрических, элементов
...соответственно, входу, вторые выводы первогорвого и второго С целью расширения функциональных возмасштабных резисторов являются входом и можностей за счет моделирования характевыходом устроиства соответственно отли- ристик нелинейных элементов сч а ю щ е е с я тем, что, с целью расширения 40 односторонней проводимостью с углом по- функциональных возможностей за счет мо- ворота от - 90 до +90 введены третий и делирования характеристеристик нелинейных четвертый 4 сумматоры, первый 7, второй 8, элементов с односторонт о носторонней проводимо- третий 9, четвертый 10 и пятый 11 умножистью с углом поворота от - 90 до+90, ввве- тели напряжения, вход устройства подклюдены третий и четвертый сумматоры, 45 чен к первому входу первого...
Устройство для контурного программного управления станком

Номер патента: 716020
Опубликовано: 15.02.1980
Авторы: Вульфсон, Левин, Лурье
МПК: G05B 19/19
Метки: контурного, программного, станком
...Й,с., к эвольвенте,(. представляет сооои ту же эвольвенту, но повернутую на угол р. это оостоятельство дозволяет в данном устроистве осуществлять 6 езэквидистантное программирование.устроиство раоотает следующим обрамюйПараметры основных окружностей обрабатываемых эвольвент, записанные в управляющеи программе программоносителясчитываются олоком 2 и передаются в интерполятор . параметры радиусав кривизны оОраоатываемых эвольвент также считываются с программоносителя 1 и после корректировки в олоке вычисления эквидистанты 4 на величину радиуса инструмента, информация с которои задается оператором на пульте управления о, передается в интерполятор спирали Архимеда. Последнии формирует и одновременно выдает на олоки 7 и ь для...
Предыдущий патент: Цикловая система программного управления манипулятором
Следующий патент: Устройство для программного управления промышленным роботом
Случайный патент: Система управления электростартером для запуска газотурбинного двигателя