Способ управления исполнительным двигателем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 189074
Автор: Хлыпало
Текст
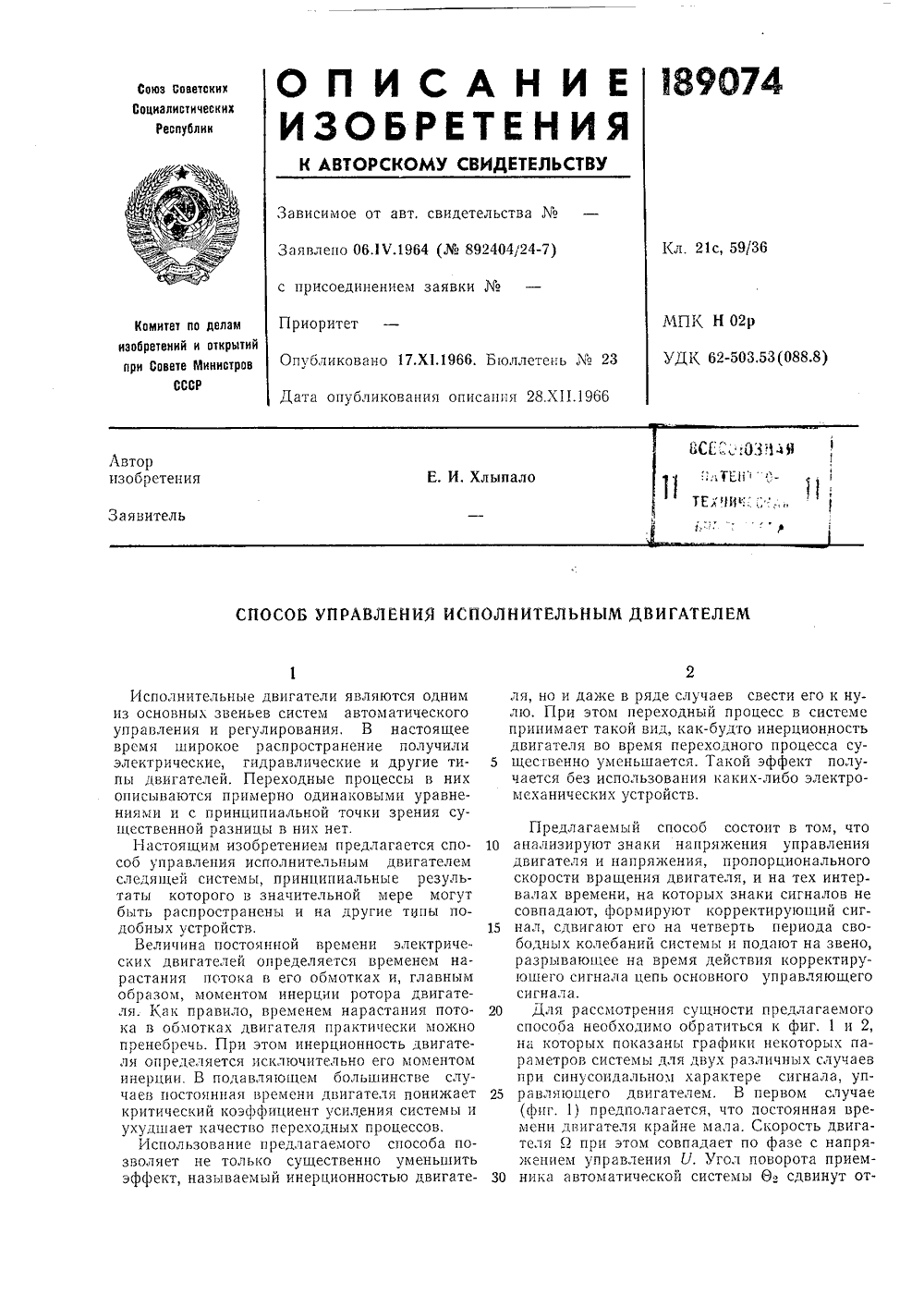
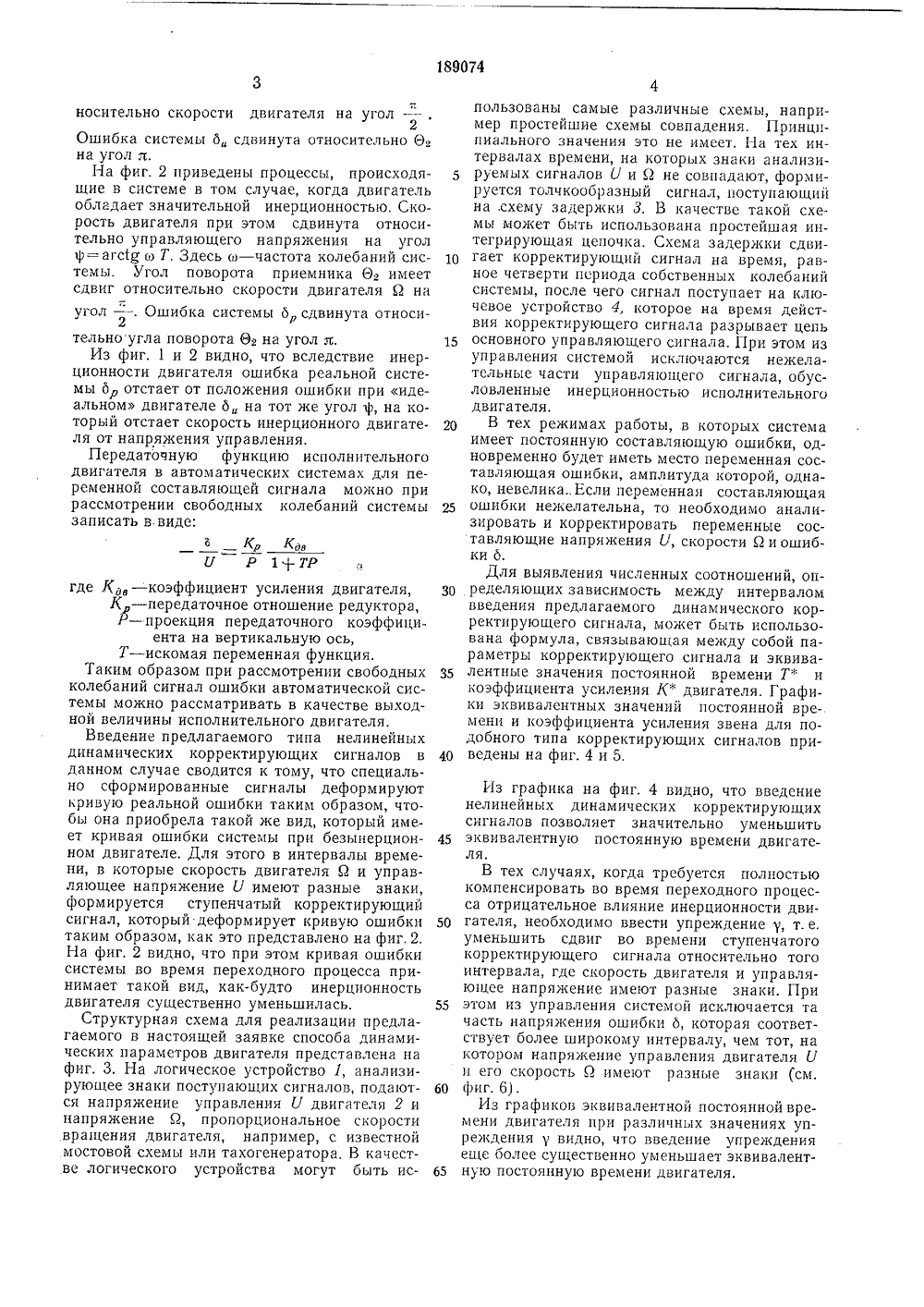
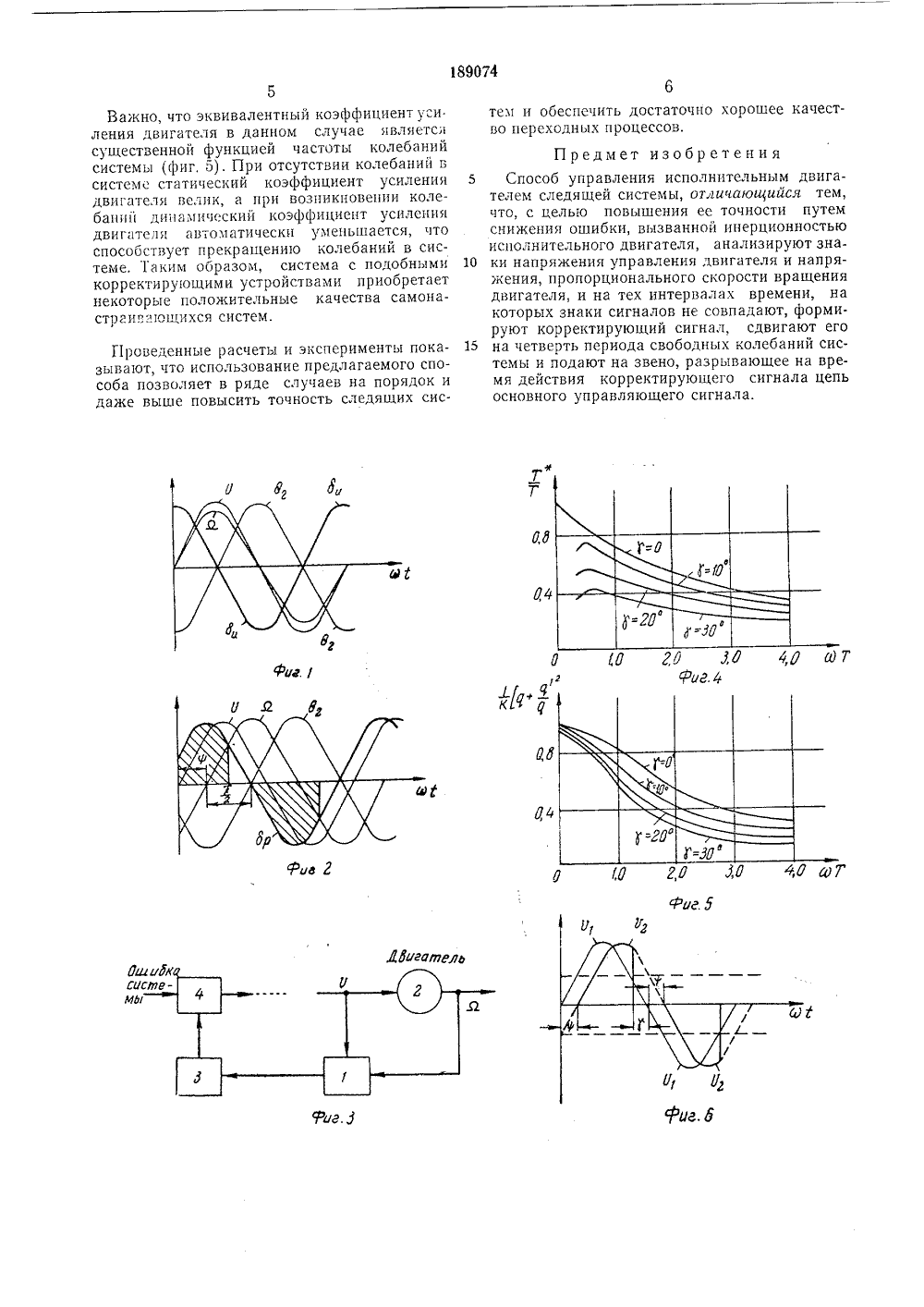
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик.1964 ( 892404/24 аявлено 06. рисоединен м заявки1 ПК Н 02 р Приорите Комитет по деламобретений и открытийри Совете МинистровСССР К 62-503.53 (088,8) убликовано 17.Х 1.1966. Бюллетень23та опубликования описания 28,ХП.1966 Авторизобретени. И. Хлыпало аявител ОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ ля, но и даже в ряде слу лю. При этом переходнь принимает такой вид, как двигателя во время пере щественно уменьшается. чается без использования механических устройств,чаев свес й процес -будто ин ходного п Такой эф каких-ли ти его к нус в системерционность роцесса суфект полубо электроПредлагаем 10 анализируют з двигателя и на скорости вращ валах времени совпадают, фо 15 нал, сдвигают бодных колеба разрывающее юшего сигнал сигнала. 20 Для рассмо способа необх на которых п раметров сист при синусоид 25 равляюгцего(фиг. 1) пред мени двигател тсля О при э жением управ 30 ника автоматИсполнительные двигатели являются одним из основных звеньев систем автоматического управления и регулирования, В настоящее время широкое распространение получили электрические, гидравлические и другие типы двигателей. Переходные процессы в них описываются примерно одинаковыми уравнениями и с принципиальной точки зрения существенной разницы в них нет.Настоящим изобретением предлагается способ управления исполнительным двигателем следящей системы, принципиальные результаты которого в значительной мере могут быть распространены и на другие типы подобных устройств.Величина постоянной времени электрических двигателей определяется временем нарастания пстока в его обмотках и, главным образом, моментом инерции ротора двигателя. Как правило, временем нарастания потока в обмотках двигателя практически можно пренебречь. При этом инерционность двигателя определяется исключительно его моментом инерции. В подавляющем большинстве случаев постоянная времени двигателя понижает критический коэффициент усиления системы и ухудшает качество переходных процессов.Использование предлагаемого способа позволяет не только существенно уменьшить эффект, называемый инерционностью двигатеый способ состоит в том, что наки напряжения управления пряжения, пропорционального ения двигателя, и на тех интер, на которых знаки сигналов не рмируют корректирующий сигего на четверть периода своний системы и подают на звено, на время действия корректируа цепь основного управляющего трения сущности предлагаемого одимо обратиться к фиг. 1 и 2, оказаны графики некоторых паемы для двух различных случаев альном характере сигнала, упдвигателем. В первом случае полагается, что постоянная врея крайне мала. Скорость двигатом совпадает по фазе с напряления К Угол поворота приемической системы О сдвинут относительно скорости двигателя на угол -2 Ошибка системы бсдвинута относительно О на угол ч.На фиг. 2 приведены процессы, происходящие в системе в том случае, когда двигатель обладает значительной инерционностью. Скорость двигателя при этом сдвинута относительно управляющего напряжения на угол ф=агс 1 д в Т. Здесь ь - частота колебаний системы. Угол поворота приемника О имеет сдвиг относительно скорости двигателя Й на угол - . Ошибка системы 6 сдвинута относи 2тельно угла поворота Ов на угол л.Из фиг. 1 и 2 видно, что вследствие инерционности двигателя ошибка реальной системы 6 отстает от положения ошибки при идеальном двигателе бна тот же угол ф, на который отстает скорость инерционного двигателя от напряжения управления.Передаточную функцию исполнительного двигателя в автоматических системах для переменной составляющей сигнала можно при рассмотрении свободных колебаний системы записать в виде:Кр КдвУ Р 1+ТР ГдЕ Кдв - КОЭффИцИЕНт уСИЛЕНИя дВИГатЕЛя,К в передаточн отношение редуктора,Р - проекция передаточного коэффициента на вертикальную ось,Т - искомая переменная функция.Таким образом при рассмотрении свободных колебаний сигнал ошибки автоматической системы можно рассматривать в качестве выходной величины исполнительного двигателя.Введение предлагаемого типа нелинейных динамических корректирующих сигналов в данном случае сводится к тому, что специально сформированные сигналы деформируют кривую реальной ошибки таким образом, чтобы она приобрела такой же вид, который имеет кривая ошибки системы при безынерционном двигателе. Для этого в интервалы времени, в которые скорость двигателя Й и управляющее напряжение У имеют разные знаки, формируется ступенчатый корректирующий сигнал, который деформирует кривую ошибки таким образом, как это представлено на фиг.2. На фиг. 2 видно, что при этом кривая ошибки системы во время переходного процесса принимает такой вид, как-будто инерционность двигателя сушественно уменьшилась.Структурная схема для реализации предлагаемого в настоящей заявке способа динамических параметров двигателя представлена на фиг, 3. На логическое устройство 1, анализирующее знаки поступающих сигналов, подаются напряжение управления 1l двигателя 2 и напряжение Й, пропорциональное скорости вращения двигателя, например, с известной мостовой схемы или тахогенератора, В качестве логического устройства могут быть ис 5 10 15 20 25 30 35 40 45 50 55 60 65 пользованы самые различные схемы, например простейшие схемы совпадения, Принципиального значения это не имеет. На тех интервалах времени, на которых знаки анализируемых сигналов (/ и Й не совпадают, формируется толчкообразный сигнал, поступающий на,схему задержки 3, В качестве такой схемы может быть использована простейшая интегрирующая цепочка. Схема задержки сдвигает корректирующий сигнал на время, равное четверти периода собственных колебаний системы, после чего сигнал поступает на ключевое устройство 4, которое на время действия корректирующего сигнала разрывает цепь основного управляющего сигнала. При этом из управления системой исключаются нежелательные части управляющего сигнала, обусловленные инерционностью исполнительного двигателя.В тех режимах работы, в которых система имеет постоянную составляющую ошибки, одновременно будет иметь место переменная составляющая ошибки, амплитуда которой, однако, невеликаЕсли переменная составляющая ошибки нежелательна, то необходимо анализировать и корректировать переменные составляющие напряжения С, скорости Й и ошибки 6,Для выявления численных соотношений, определяющих зависимость между интервалом введения предлагаемого динамического корректирующего сигнала, может быть использована формула, связывающая между собой параметры корректирующего сигнала и эквивалентные значения постоянной времени Т" и коэффициента усиления Кф двигателя. Графики эквивалентных значений постоянной времени и коэффициента усиления звена для подобного типа корректирующих сигналов приведены на фиг. 4 и 5,Из графика на фиг. 4 видно, что введение нелинейных динамических корректирующих сигналов позволяет значительно уменьшить эквивалентную постоянную времени двигателя.В тех случаях, когда требуется полностью компенсировать во время переходного процесса отрицательное влияние инерционности двигателя, необходимо ввести упреждение у, т.е, уменьшить сдвиг во времени ступенчатого корректирующего сигнала относительно того интервала, где скорость двигателя и управляющее напряжение имеют разные знаки. При этом из управления системой исключается та часть напряжения ошибки 6, которая соответствует более широкому интервалу, чем тот, на котором напряжение управления двигателя У и его скорость Й имеют разные знаки (см. фиг, 6).Из графиков эквивалентной постоянной времени двигателя при различных значениях упреждения у видно, что введение упреждения еще более существенно уменьшает эквивалентную постоянную времени двигателя.Важно, что эквивалентный коэффициент уси. ления двигателя в данном случае является существенной функцией частоты колебаний системы (фиг, 5). При отсутствии колебаний в системс статический коэффициент усиления двигателя велик, а при возникновении колебаний динамический коэффициент усиления двигателя автоматически уменьшается, что способствует прекращению колебаний в системе. 1 аким образом, система с подобными корректирующими устройствами приобретает некоторые положительные качества самонастраивающихся систем. Г 1 роведенные расчеты и эксперименты показывают, что использование предлагаемого способа позволяет в ряде случаев на порядок и даже выше повысить точность следящих систем и обеспечить достаточно хорошее качество переходных процессов. Предмет изобретения5 Способ управления исполнительным двигателем следящей системы, отгичаюгчийся тем, что, с целью повышения ее точности путем снижения ошибки, вызванной инерционностью исполнительного двигателя, анализируют зна ки напряжения управления двигателя и напряжения, пропорционального скорости вращения двигателя, и на тех интервалах времени, на которых знаки сигналов не совпадают, формируют корректирующий сигнал, сдвигают его 15 на четверть периода свободных колебаний системы и подают на звено, разрывающее на время действия корректирующего сигнала цепь основного управляющего сигнала.
СмотретьЗаявка
892404
Е. И. Хлыпало
МПК / Метки
МПК: G05D 13/02, H02P 5/00
Метки: двигателем, исполнительным
Опубликовано: 01.01.1966
Код ссылки
<a href="https://patents.su/3-189074-sposob-upravleniya-ispolnitelnym-dvigatelem.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления исполнительным двигателем</a>
Автоматическая система единого времени

Номер патента: 657397
Опубликовано: 15.04.1979
Авторы: Агафонов, Виноградов, Никонорова, Туманов, Якунин
МПК: G04C 13/00
Метки: автоматическая, времени, единого
...декад эта информация отно 25сится.По упрежденному секундному сигнапу,выдаваемому формироватепем 2, передаваемая информация меняется.ЮТактовая частота продвигающих импульсов, вырабатываемых формироватепем4, выбирается таким образом, чтобысекуадный сигнал, поступающий с выхода,ф 1формйроватепя 2, совпадап с переднимЭЗфронтом первого импупьса первой кодовойкомбинации, несущей информацию о значении единиц секунд.Дпя выдепения секундного сигналапреобразоватепем 10 адрес последнегознака (десятки часов) в конце каждойсекунды заменяется на маркерную ком-бинацию.Йпя формирования маркерной комбинации используются секундные импупьсы,образованные на маркерном выходе формирователя 2. Эти импупьсы формируютсяс упреждением относительно сигналов...
Способ автоматической коррекции приборов информационной системы единого времени

Номер патента: 600510
Опубликовано: 30.03.1978
Авторы: Ильин, Коншин, Тарасенко, Ткачева, Шаряпов
МПК: G04C 11/00
Метки: автоматической, времени, единого, информационной, коррекции, приборов, системы
...от помех. Сигнал на выходе селектора импульсов имеетформу видеопмпульса (фиг. 2,в). Эти видеоимпульсы просчитываются счетчиком (фиг,2,г), на выходе которого по шестому сигналуточного времени появляется положительныйимпульс, передний фронт которого соответствует моменту точного времени.Рассмотрим процесс автоматического регулирования частоты для случая коррекции показании часов двенадцать раз в сутки (через2 ч),В общем случае интервал между соседнимициклами коррекции может быть выбран другим в зависимости от значения частотып .Предположим, что на выходе запоминающеготриггера 4 высокий уровень напряжения (уровень 1) соответствует положению, при котором генератор 7 имеет частоту ,)о, а низкий уровень (уровень 0) - частоте (о....
Автоматическая система единого времени

Номер патента: 871146
Опубликовано: 07.10.1981
Авторы: Кустарев, Михайлов, Рейфман, Рябов, Тарбеев, Троицкий
МПК: G04C 13/00
Метки: автоматическая, времени, единого
...времени Фиксируется блоком обнаружениянеисправности вторичных корректируемых часов следующим образом. Сигналкоррекции с второго выхода блокауправления 2 устанавливает счетчикимпульсов 15,в нулевое состояние,Если сигнал коррекции часов не поступает в течение интервала времени, 1 О заданного емкостью счетчика, счетчикпереполняется и на его первом выходепоявляется сигнал, поступающий натретьи входы сигнального табло 10 иэлемента ИЛИ 11. Остановка минутнойстрелки вторичных часов 3 в интервале 00 мин. 00 сек +в мин. обнаруживается следующим образом, С третьеговыхода счетчика импульсов 15 на счет-.ный вход счетчика 14 емкостью 2 е мин.поступают минутные импульсы. Счетчик 20 14 удерживается в нулевом состояниипри отсутствии сигнала с...
Система смазки двигателя внутреннего сгорания с сухим картером

Номер патента: 1320464
Опубликовано: 30.06.1987
Авторы: Алексеев, Бабкин, Григорьев, Осокин
МПК: F01M 5/02
Метки: внутреннего, двигателя, картером, сгорания, смазки, сухим
...3 подает смазочную жидкость из емкости 1 в главную масляную магистраль и далее к трущимся парам. Смазочная жидкость, стекающая в картер 10 двигателя, перекачивается оттуда насосом 9 через теп 55 5 1 О 15 20 25 30 35 40 45 50 лообменник 11 в емкость 1. Клапан 22 при этом закрыт.После остановки двигателя во всасывающем трубопроводе 7 остается смазочная жидкость, которая при хранении транспортного средства на открытой стоянке застывает.Перед запуском двигателя смазочная жидкость в емкости 1 с помощью электронагревательных элементов 2 подогревается. После того как водитель повернул ключ в замке-выключателе 24, включаются насосы 8 и 12 и открывается клапан 22, Нагретая смазочная жидкость из емкости 1 подается в главную масляную магистраль...
Устройство синхронизации в одночастотных многоканальных адресных системах с временным разделением каналов

Номер патента: 1811018
Опубликовано: 23.04.1993
Авторы: Зубарев, Новиков, Светличный, Язловецкий
МПК: H04L 7/06
Метки: адресных, временным, каналов, многоканальных, одночастотных, разделением, синхронизации, системах
...частота которого бт.Сигналы с выходов делителей 22 через коммутатор 23 поступают на формирователь 25, обеспечивая нужную длительность тактовых и полутактовых импульсов,Для исклк) гения шумов незанятых для передачи информации каналов цикла передачи вход и выход блока на это время закрываются с помощью элемента И 18,Фазовая автоподстройка частоты тактовых импульсов временных каналов обеспечивается следующим образом, Входной сигнал поступает на выходы регистра и перемножителя дискриминатора 20, где перемножается с сигналом с выхода первого разряда регистра, Произведение двух сигналов, получаемое на выходе перемножителя, зависит от разности фаз между перемножаемыми сигналами, На другом перемножителе дискриминатора 20 производится...
Предыдущий патент: 189073
Следующий патент: Зидя i. •.: . -•: ngt; amp; jii, g: lia
Случайный патент: Фильтр для очистки газа от жидкости