Робот к листоштамповочному прессу
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1250363
Автор: Павликов

Текст
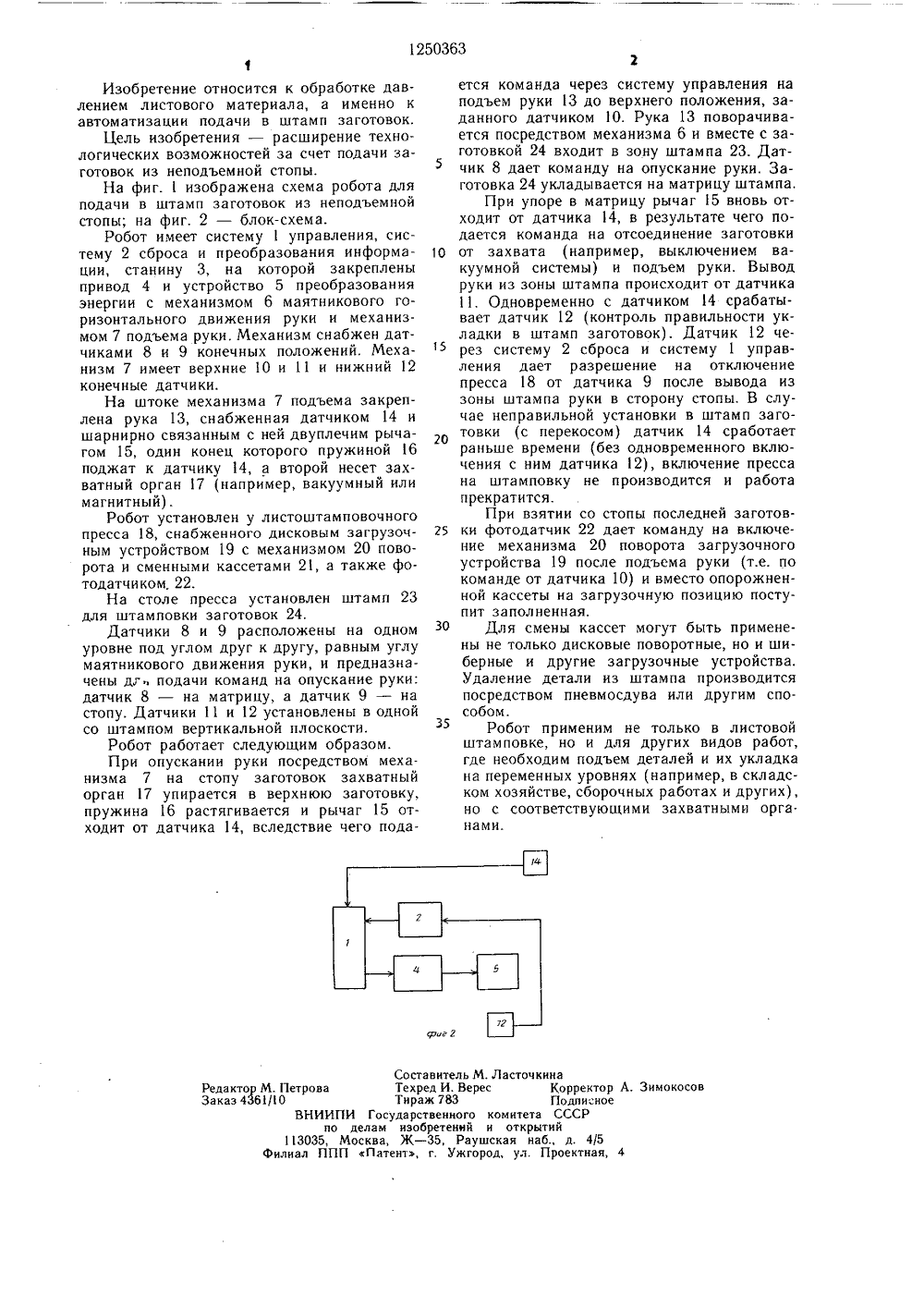
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК ЯО 1250363 д) 4 В 2 Р 43/00, В 25 1 3/00 О НИЕ ИЗОБРЕТЕН(54) (57) РОБОТ НОМУ ПРЕССУ отличающийся те ния технологичес подачи заготовок снабжен меха низ мещения руки и связанным с сист тему сброса и пр Пермс- ОктябрьО,71 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ВТОРСКОМУ СВИДЕТЕЛЬСТВ(71) Производственное объединениекий машиностроительный завод им.ской революции(56) Авторское свидетельство СССР880580, кл. В 21 Р 43/00, В 2512.02.80. К ЛИСТОШТАМПОВОЧ- по авт. св.880580, м, что, с целью расширеких возможностей за счет из неподъемной стопы, он мом вертикального передатчиком его положения, емой управления через сисеобразования информации.1250363 Составитель М. Ласточкина Редактор М. Петрова Техред И. Верес Корректор А. Зимокосов Заказ 4381/1 О Тираж 783 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4/5 Филиал ППП Г 1 атент, г. Ужгород, ул. Проектная, 4Изобретение относится к обработке давлением листового материала, а именно к автоматизации подачи в штамп заготовок.Цель изобретения - расширение технологических возможностей за счет подачи заготовок из неподъемной стопы.На фиг. 1 изображена схема робота для подачи в штамп заготовок из неподъемной стопы; на фиг. 2 - блок-схема.Робот имеет систему 1 управления, систему 2 сброса и преобразования информации, станину 3, на которой закреплены привод 4 и устройство 5 преобразования энергии с механизмом 6 маятникового горизонтального движения руки и механизмом 7 подъема руки, Механизм снабжен датчиками 8 и 9 конечных положений. Механизм 7 имеет верхние 10 и 11 и нижний 12 конечные датчики.На штоке механизма 7 подъема закреплена рука 13, снабженная датчиком 14 и шарнирно связанным с ней двуплечим рычагом 15, один конец которого пружиной 16 поджат к датчику 14, а второй несет захватный орган 17 (например, вакуумный или магнитный).Робот установлен у листоштамповочного пресса 18, снабженного дисковым загрузочным устройством 19 с механизмом 20 поворота и сменными кассетами 21, а также фотодатчиком, 22.На столе пресса установлен штамп 23 для штамповки заготовок 24.Датчики 8 и 9 расположены на одном уровне под углом друг к другу, равным углу маятникового движения руки, и предназначены дл; подачи команд на опускание руки: датчик 8 - на матрицу, а датчик 9 - на стопу. Датчики 11 и 12 установлены в одной со штампом вертикальной плоскости.Робот работает следующим образом.При опускании руки посредством механизма 7 на стопу заготовок захватный орган 17 упирается в верхнюю заготовку, пружина 16 растягивается и рычаг 15 отходит от датчика 14, вследствие чего подается команда через систему управления на подъем руки 13 до верхнего положения, заданного датчиком 10. Рука 13 поворачивается посредством механизма 6 и вместе с заготовкой 24 входит в зону штампа 23. Датчик 8 дает команду на опускание руки. Заготовка 24 укладывается на матрицу штампа.При упоре в матрицу рычаг 15 вновь отходит от датчика 14, в результате чего подается команда на отсоединение заготовки 10 от захвата (например, выключением вакуумной системы) и подъем руки. Вывод руки из зоны штампа происходит от датчика 11. Одновременно с датчиком 4 срабатывает датчик 12 (контроль правильности укладки в штамп заготовок). Датчик 12 через систему 2 сброса и систему 1 управления дает разрешение на отключение пресса 18 от датчика 9 после вывода из зоны штампа руки в сторону стопы. В случае неправильной установки в штамп заготовки (с перекосом) датчик 14 сработает раньше времени (без одновременного включения с ним датчика 12), включение пресса на штамповку не производится и работа прекратится.При взятии со стопы последней заготов ки фотодатчик 22 дает команду на включение механизма 20 поворота загрузочного устройства 19 после подъема руки (т.е. по команде от датчика 10) и вместо опорожненной кассеты на загрузочную позицию поступит заполненная.ЗО Для смены кассет могут быть применены не только дисковые поворотные, но и шиберные и другие загрузочные устройства.Удаление детали из штампа производится посредством пневмосдува или другим способом.Робот применим не только в листовойштамповке, но и для других видов работ, где необходим подъем деталей и их укладка на переменных уровнях (например, в складском хозяйстве, сборочных работах и других), но с соответствующими захватными орга.нами.
СмотретьЗаявка
3872789, 27.03.1985
ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ПЕРМСКИЙ МАШИНОСТРОИТЕЛЬНЫЙ ЗАВОД ИМ. ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ"
ПАВЛИКОВ НИКОЛАЙ ГАВРИЛОВИЧ
МПК / Метки
МПК: B21D 43/00, B25J 3/00
Метки: листоштамповочному, прессу, робот
Опубликовано: 15.08.1986
Код ссылки
<a href="https://patents.su/2-1250363-robot-k-listoshtampovochnomu-pressu.html" target="_blank" rel="follow" title="База патентов СССР">Робот к листоштамповочному прессу</a>
Устройство контроля захвата листовой заготовки рукой промышленного робота

Номер патента: 925624
Опубликовано: 07.05.1982
Авторы: Зерний, Крючков, Мальцевский, Семенов, Скородумов, Сулейманов
МПК: B25J 15/00
Метки: заготовки, захвата, листовой, промышленного, робота, рукой
...как показано на фиг,16. Это искривление вызывает замыкание контактов геркона. Замыкание контактов коммутирует электрическую цепь, в которую включен датчик. На этом принципе основано действие датчиков, используемых в предлагаемом устройстве контроля. Контроль осуществляется следующим40 образом,Датчик 6 контроля наличия заготовки закрепляется на захвате руки робота и настраивается с помощью микрометрических винтов 12 относи 45 тельно плоскости захвата листовой заготовки, например, электромагнитным захватом 8 таким образом, чтобы призахвате заготовки она попадала в магнитное поле магнитов датчика и вызывала искривление магнитных силовых линий, В этом случае контакты геркона датчика 6 замыкаются,и коммутирувт цепь управления 15...
Рука промышленного робота

Номер патента: 1096095
Опубликовано: 07.06.1984
Автор: Пестунов
МПК: B25J 9/00
Метки: промышленного, робота, рука
...механизм руки;на фиг. 3 в . разрез А-А на фиг. 2,Рука промьдаленного робота содержит распределитель 1, цилиндр 2,поршень 3, шток 4, магнитострикционный механизм, включающий втулки 5и 6, катушку 7, кисть 8, фиксирующееустройство, включающее распределитель 9, цилиндр 10, поршень 11, штангу 12, зажим 13, датчик 14, управляющее устройство 15, замкнутую систему управления перемещением, включающую датчик 16, сравнивающее 17, 45задающее 18 и управляющее 19 устройства,Кисть 8 установлена на внутренней втулке 6, которая жестко соединена с наружной втулкой 5, Втулка 5жестко соединена со штоком 4 поршня3. На штоке 4 закреплена штанга 12,которая расположена в зажиме 13 исвязана с датчиком 14. Датчик 14 включен в замкнутую систему...
Рука транспортного робота

Номер патента: 1328195
Опубликовано: 07.08.1987
Автор: Запольский
МПК: B25J 18/00
Метки: робота, рука, транспортного
...на основании 1 с возможностью срабатывания в крайнем положении каретки 11 относительно основания 1.50Упоры 13 и 14 устанавливаются так, что после их взаимодействия ползун 3 останавливается, а рука 4 еще не дошла до своего номинального значения хода на величину, превышающую возможное55 отклонение станции выгрузки.Рука транспортного робота работает следующим образом. При включении привода 2 в ту или другую сторону (фиг, 1) приводится в движение каретка 11, которая, в свою очередь, с помощью канатиков 6 перемещает в ту же сторону ползун 3 и руку 4. Благодаря введению каретки 11 и соединению с ней привода и конца канатиков 6,. а также благодаря установке пружин 12 между кареткой 11 и ползуном 3 рука транспортного робота плавно...
Рука промышленного робота

Номер патента: 837848
Опубликовано: 15.06.1981
Авторы: Ермаков, Михеев, Пашков, Шевченко
МПК: B25J 9/00
Метки: промышленного, робота, рука
...моментного силового цилиндра 22 по конструктивной схеме, аналогичной приводу механизма подъема. Таким образом, механизм подъема и механизм поворота схвата имеет унифицированный привод. Выходной вал 23 момент- ного силового цилиндра жестко соединен со схватом при помощи соединительного вала 24, закрепленного с возможностью враще-, ния в подшипнике 25, Корпус подшипника 25 крепится к корпусу моментного силового цилиндра 22, Вал 24 и подшипник 25 имеют отверстие д для подвода сжатого воздуха в рабочую полость силового цилиндра 26 - привода механизма закрытия-открытия схвата. Силовой цилиндр имеет шток-поршень 27 и пружину 28. Плоско-параллельное перемегцение губок 29 схвата обеспечивает пружина 30 и система рычагов 31 механизма при...
Кисть руки промышленного робота

Номер патента: 1779588
Опубликовано: 07.12.1992
Авторы: Диденко, Рябов, Сазоненко
МПК: B25J 11/00, B25J 17/00, B25J 19/00
Метки: кисть, промышленного, робота, руки
...зоне обрабатывающей машины,Известно запястье манипулятора, включающее корпус с держателем и шарнир поворота корпуса, держатель представляет собой самотормозящееся червячное колесо привода, которое совместно с шарниром заключено в корпус, выполненный разъемным, снабжено захватом с приводом, неподвижно закрепленным на стержне предплечья и соединенным с захватом через карданный шарнир, точка пересечения осей которого совмещена с точкой пересечения осей шарнира запястья, при этом привод захвата снабжен механизмом реверсивного ударно- импульсного действия,Поставленная цель достигается тем, что в устройстве. содержащем разъемное основание, рычаг, тягу, корпус, образующие шарнирный параллелограмм, вал с упором торсионом связанный с...
Предыдущий патент: Устройство для перемещения заготовок в зоне обработки
Следующий патент: Устройство для удаления деталей из зоны пресса
Случайный патент: Контейнер для легкоповреждаемых грузов