Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1575151
Авторы: Акинфиев, Новогранов, Степанов

Текст
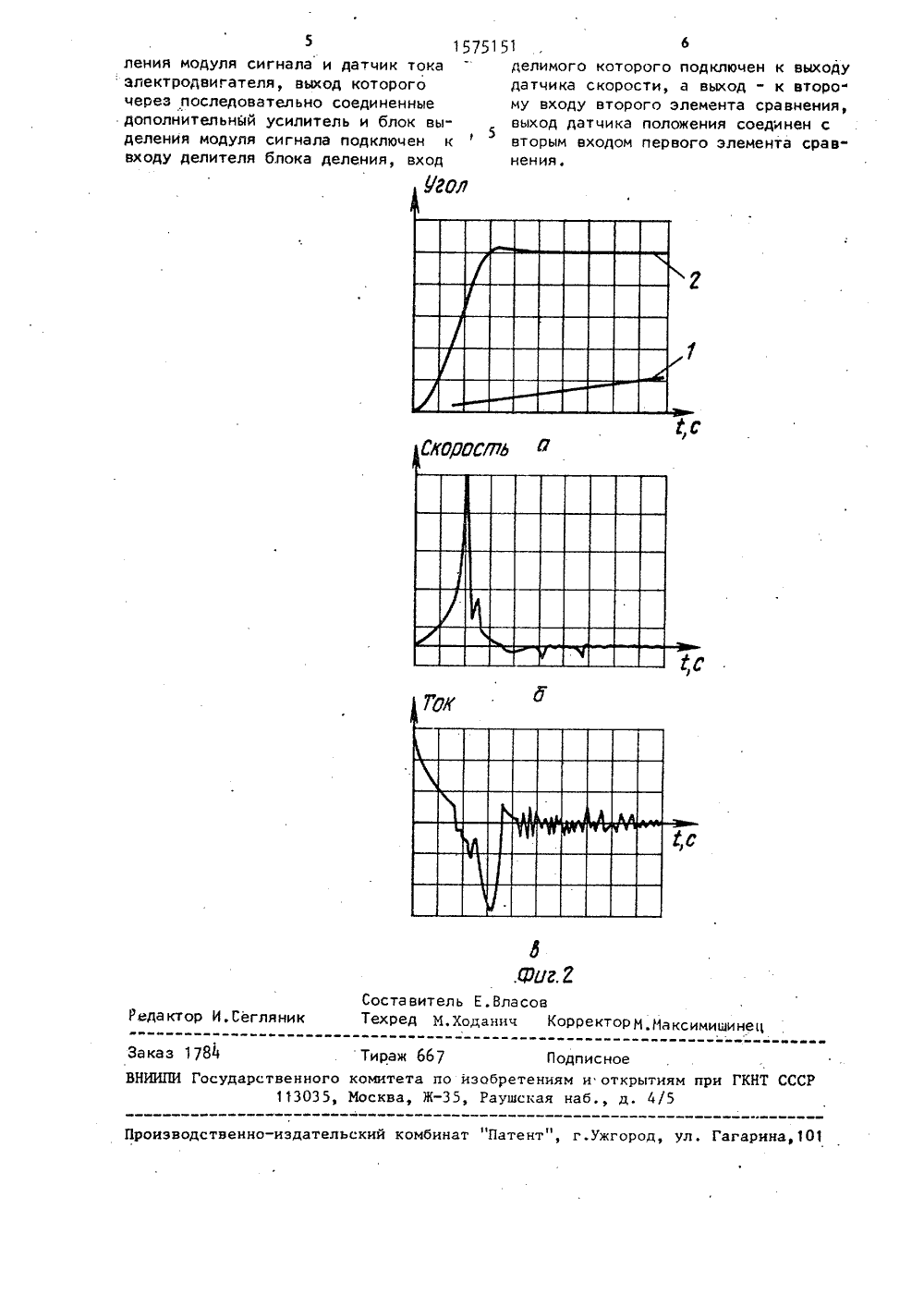
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНРЕСПУБЛИК ОСУДАРСТВЕННЫЙ КОМИТЕТО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМРИ ГКНТ СССР ЗОБРЕТЕНИЯ ЛИС" СВИДЕТЕЛЬСТВ ВТОРСК 14-24(54) СИСТЕМА УПРАВЛЕ (57) Изобретение отн автоматического регу жет быть использова и позиционных систем Цель изобретения - и ИЯ к техникения и мосит иро о д следящихения. упра выше е быст(Риг. 1 ОПИСАН(51)5 С 05 В 11/01 родеиствия и усВ системе внутрратная связь прваниях практичеподходе к положкоэффициент обрти резко возрасдержит задатчикдействия, элемепо положению иэлектродвигати 6, редукторния 8, датчик итока 10, дополн11, блок. 12 выдла, блок делениляет полностьюные возможности2 ил. тойчивости системы. енняя скоростная оби больших рассогласоски размыкается, а при ению согласования атной связи по скоростает. Устройство со 1 управляющего вознты сравнения 2 и 3 скорости, усилитель тель 5, датчик.скорос" 7, объект регулироваоложения 9, датчик ительный усилитель еления модуля сигная 13, Система позво- а использовать скоростэлектродвигателя,.Изобретение относится к автоматическому регулированию и может быть использовано для следящих и позицион" ных систем управления.Цель изобретения - повышение быст родействия и устойчивости системы управления.На фиг. 1 представлена блок-схема предлагаемой системы управления, на фиг. 2 а- переходные процессы На валу нагрузки при подаче на системы скачкообразного входного воздействия.; 1 - без блока деления в скоростном контуре; 2 - с блоком деле" ния в скоростном контуре;на фиг. 2 бйереходной процесс в цепи обратной связи по скорости при наличии блока Деления; на Фиг. 2 в - график изменения тока в якорной цепи электродвигателя.Система содержит задатчик управляющего воздействия 1, элементы сравнения 2 и 3, усилитель 1, электродвигатель 5, датчик скорости 6, редуктор 7, объект регулирования 8, датчик положения 9, датчик тока электродвигателя 10, дополнительный. усилитель 11, блок выделения модуля сигнала 12,. блок деления 13.Система работает следующим образом.С задатчика управляющего воздействия 1 сигнал, пропорциональный требуе. мому положению объекта регулирования 8 поступает на первый вход элемента ;сравнения по положению 2, На второй вход элемента сравнения 2 поступает сигнал от датчика положения 9, соответствующий текущему положению объекта регулирования 8. Элемент сравнения 2 вырабатывает сигнал задания скорости электродвигателя 5, который идет на первый вход элемента сравнения по скорости 3. На второй вход элемента сравнения 3 поступает сигнал с выхода блока деления 13. В соответствии с разностью поступивших сигналов элемент сравнения 3 вырабатывает управляющее напряжение дляэлектродвигателя 5, которое усиливается усилителем ч. Сигнал с выхода усилителя поступает в якорную цепь электродвигателя 5, который через редуктор 7 приводит в действие объект регулирования 8, Сигнал, соответствующий текущей скорости электродвигателя 5, через датчик скорости 6 поступает на первый вход блока деления 13. На второй вход блока деления13 поступает сигнал с выхода блокавыделения модуля сигнала 12 и опорное напряжение 0 э для исключения дополнительный усилитель 11 и датчик тока 10 поступает сигнал из якорнойцепи электродвигателя 5 пропорциональный току электродвигателя. Токв якорной цепи электродвигателя пропорционален развиваемому им ускорению, Как видно из графика, обозначенного цифрой 2 на Фиг. 2 а и графикана Фиг. 2 в, ток в якорной цепи электродвигателя достигает максимума,когда система находится далеко отположения согласования, и затем, помере приближения объекта регулирова 1 О 15 20 25 ния к положению согласования токстремится к нулю, Используя модульпредварительно усиленного сигналапо току в качестве делителя, научастке времени, когда объект регулирования находится далеко от положения согласования, практически размыкается обратная связь по скорости.При этом двигатель развивает макси,мально возможные скорость и ускорение при данной нагрузке. Затем, по мере приближения к положению согласо.вания, ток в якорной цепи двигателястремится к нулю и если Б о = 1, токоэффициент, обратной связи по скорости становится равным коэффициентупередачи датчика скорости 6, которыйдостаточно большой (как правило Сотые) и система резко демпфируется. Формула изобретенияСистема управления, содержащая блок деления, опорный вход которого соединен с входом опорного напряжения системы, задатчик управляющего воздействия, выход которого подключен к первому входу первого элемента сравнения, выход которого соединен с . первым входом второго элемента сравнения, подключенного выходом через последовательно соединенный усилитель к входу электродвигателя, содержащего датчик скорости, выход электродвигателя через редуктор кинематически соединен с объектом регулирования, снабженным датчиком положения, о л и ч а ю щ а я с я тем, что, с целью повышения быстродействия и устойчивости системы, в нее введены .лополнительный усилитель, блок выде 5 . возможности деления на нуль, На блок выделения модуля сигнала 12 через. Власов анич КорректорМ,Максимишинец актор И.Сегляние ею ее т ещт т Тираж 667 Подписноекомитета по изобретениям и открытМосква, Ж, Раушская наб., д. 4 Заказ 178 НТ СССР иям приПроизводственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина,1 5 15751 ления модуля сигнала и датчик тока электродвигателя, выход которого через последовательно соединенные дополнительный усилитель и блок выделения модуля сигнала подключен к5 входу делителя блока деления, вход 51бделимого которого подключен к выходу датчика скорости, а выход - к второ му входу второго элемента сравнения, выход датчика положения соединен с вторым входом первого элемента сравнения.
СмотретьЗаявка
4439628, 19.05.1988
ИНСТИТУТ МАШИНОВЕДЕНИЯ ИМ. А. А. БЛАГОНРАВОВА
АКИНФИЕВ ТЕОДОР САМУИЛОВИЧ, НОВОГРАНОВ БОРИС НИКОЛАЕВИЧ, СТЕПАНОВ АНДРЕЙ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 30.06.1990
Код ссылки
<a href="https://patents.su/3-1575151-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для стабилизации скорости электродвигателя

Номер патента: 921013
Опубликовано: 15.04.1982
МПК: H02P 5/06
Метки: скорости, стабилизации, электродвигателя
...счетчике 10 импульсов и генераторе 11 импульсов стабильной частоты. При этом первый вход триггера9 соединен с выходом дифференцирующего блока 5, второй вход - с выходом счетчика 10 импульсов, а выходсо входом интегратора 7 и первым входом счетчика 10 импульсов, второйвход котброго соединен с выходом генератора 11 импульсов стабильной частоты.Устройство для стабилизации скорости электродвигателя работает сле"дующим образом,35Переменное напряжение, частотакоторого пропорциональна скоростивращения выходного вала электродвифгателя 2, с выхода датчика 3 скорости (фиг. 2 а) поступает на вход формирователя 1 импульсов, С выходаформирователя 4 импульсов напряже- .ние (фиг, 2 б) поступает на вход дифФеренцирующего блока 5, который вырабатывает...
Устройство для регулирования скорости электродвигателя

Номер патента: 964936
Опубликовано: 07.10.1982
Авторы: Бабак, Пронин, Процеров, Радимов, Фельше
МПК: H02P 5/06
Метки: скорости, электродвигателя
...тиристор включился вработу с тем же углом управленияе(о,что и первый, и к этому моменту времени поступило задание на новое значение среднего тока 1 р. Длядостижения нового, большего по величине, тока, потребуется уменьшитьугол управления тиристоров. Однакозаданный ток будет достигнут приэтом через достаточно большое числоинтервалов проводимости, так как якорная цепь в режиме непрерывных токовпредставляет собой апериодическоезвено с постоянной времени Т. Для достижения предельного быстродействия требуется осуществить форсировкуоткрыть очередной тиристор с "переходнымн углом сп, меньшим заданного, а следующий тиристор - уже с заданным углом сК. ".:Переходный" угол управления записываетсяф 11 о П7 9649 где 4 оп - приращение...
Датчик угловой скорости

Номер патента: 1010566
Опубликовано: 07.04.1983
Авторы: Белошабский, Зингер, Итенберг, Мыльников, Савельев
МПК: G01P 3/48
Метки: датчик, скорости, угловой
...угловой скорости..Указанная цель достигается тем, что в датчик угловой скорости, содержащий два блока дифференцирования, всод каждого из которых подключен к одному из выходов синусно-косинусного датчика углового положения, а выходы связаны с входами первого сумматора, введены блок деления, второй сумматор и четыре блока выделения модулей, первый и второй из которых подключены входами по одному к выходам соответствующих блоков дифференцирования, а выходами - к входам первого сумматора, третий и четвертый подключены входами по одному к входам соответствующих блоков дифференцирования, а выходами - к входам второго сумматора, при этом выход первого сумматора подключен к входу делимого блока деления, выход второго сумматорак входу...
Устройство для регулирования скорости электродвигателя

Номер патента: 1376207
Опубликовано: 23.02.1988
Авторы: Дмитриев, Искачкин, Трунов
МПК: H02P 7/28
Метки: скорости, электродвигателя
...3 импульсов. При этом триггер 11 остается в состоянии, при котором на его выходе высокий уровень, так как его устано. вочный вход 1 обладает приоритетом по отношению к входу П . Счетный триггер 13 с приходом на его вход импульса меняет свое состояние на противоположное, при этом на выходе1,устанавливается низкий уровень напряжения, а на выходе 11 " высокий.Интегратор 1, на управляющем входе которого теперь низкий уровеньнапряжения, начинает интегрировать5сигнал управления, поступающий отисточника 6 управляющего напряжениячерез согласующий усилитель 7 на егоинформационный вход 11, Следовательно, интегратор 8, на управляющемвходе которого теперь высокий уровень,устанавливается в нулевое состояние,Его выходное напряжение снижается...
Способ регулирования скорости электродвигателя постоянного тока

Номер патента: 1399881
Опубликовано: 30.05.1988
Авторы: Вдовиченко, Процеров, Радимов
МПК: H02P 5/16
Метки: постоянного, скорости, электродвигателя
...и 13 для граничного режима, функциональный преобразователь 15 преобразует это отношение 2 О в изменение относительно граничного режима величины фазового сдвига между началом интервала проводимости и моментом достижения током граничного режима максимального значения на ин тервале в соответствии с занесенной в преобразователь зависимостью Л=Ев в в ), характер которой показан1 р,максна фиг.3. ЗОВ блоке 12 иэ угла О, равного 180 для однофазных схем, 150 - для нулеовой схемы и 120 - для трехфазной мостовой схемы преобразователя, вычитаются угол управления Ы(п), величина фазового сдвига (п) и инвертированное инвертором 16 значение изменения величины фазового сдвига д Ч(п).В блоке 17 вычисления функции синуса по величине угла, полученного в 4...
Предыдущий патент: Трехальтернативный аналоговый компаратор
Следующий патент: Адаптивная система управления
Случайный патент: Щеточный скребок для очистки трубопроводов