Система совмещенного управления приводами по двум независимым координатам
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1736769
Авторы: Баранов, Преображенский






Текст
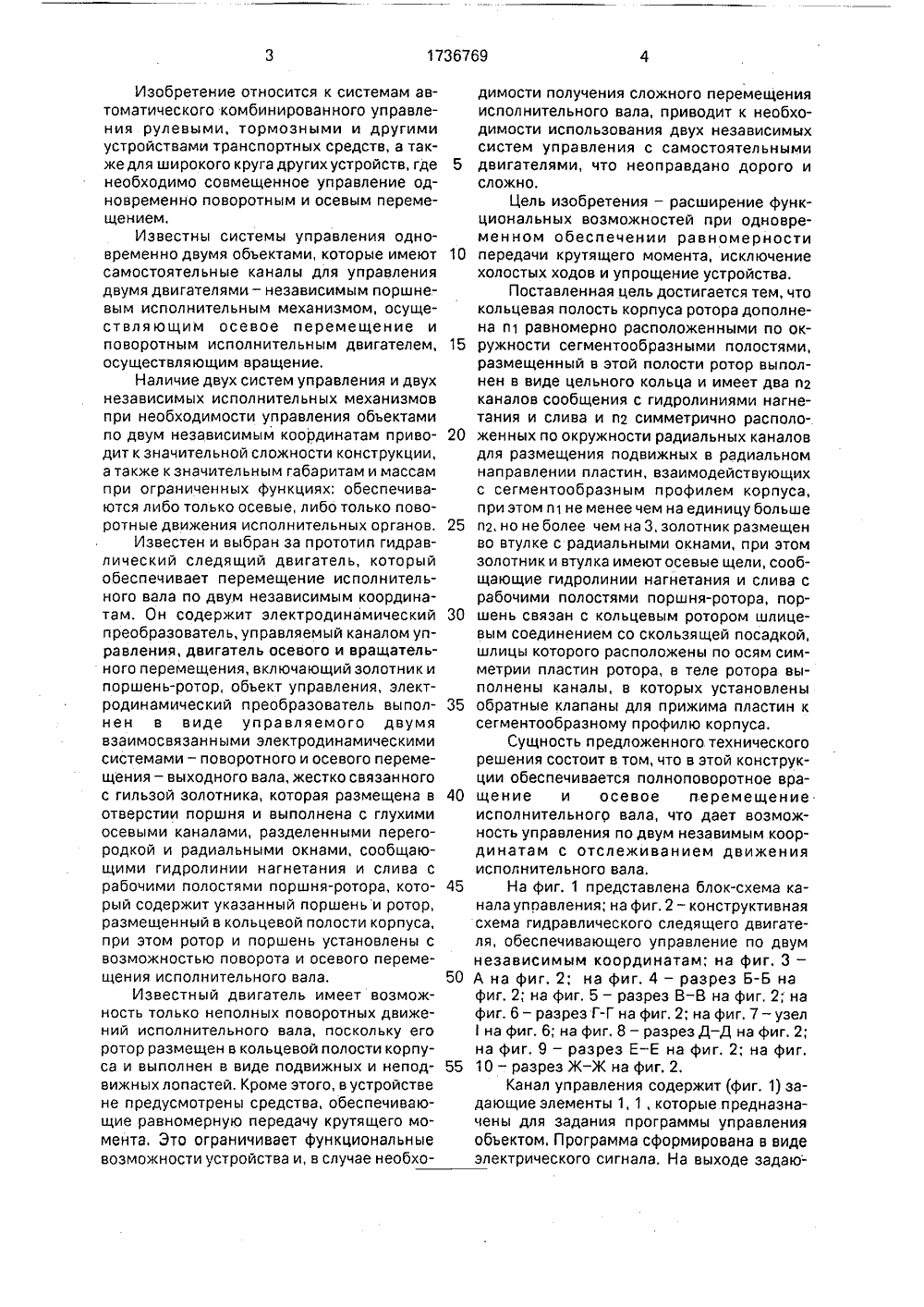
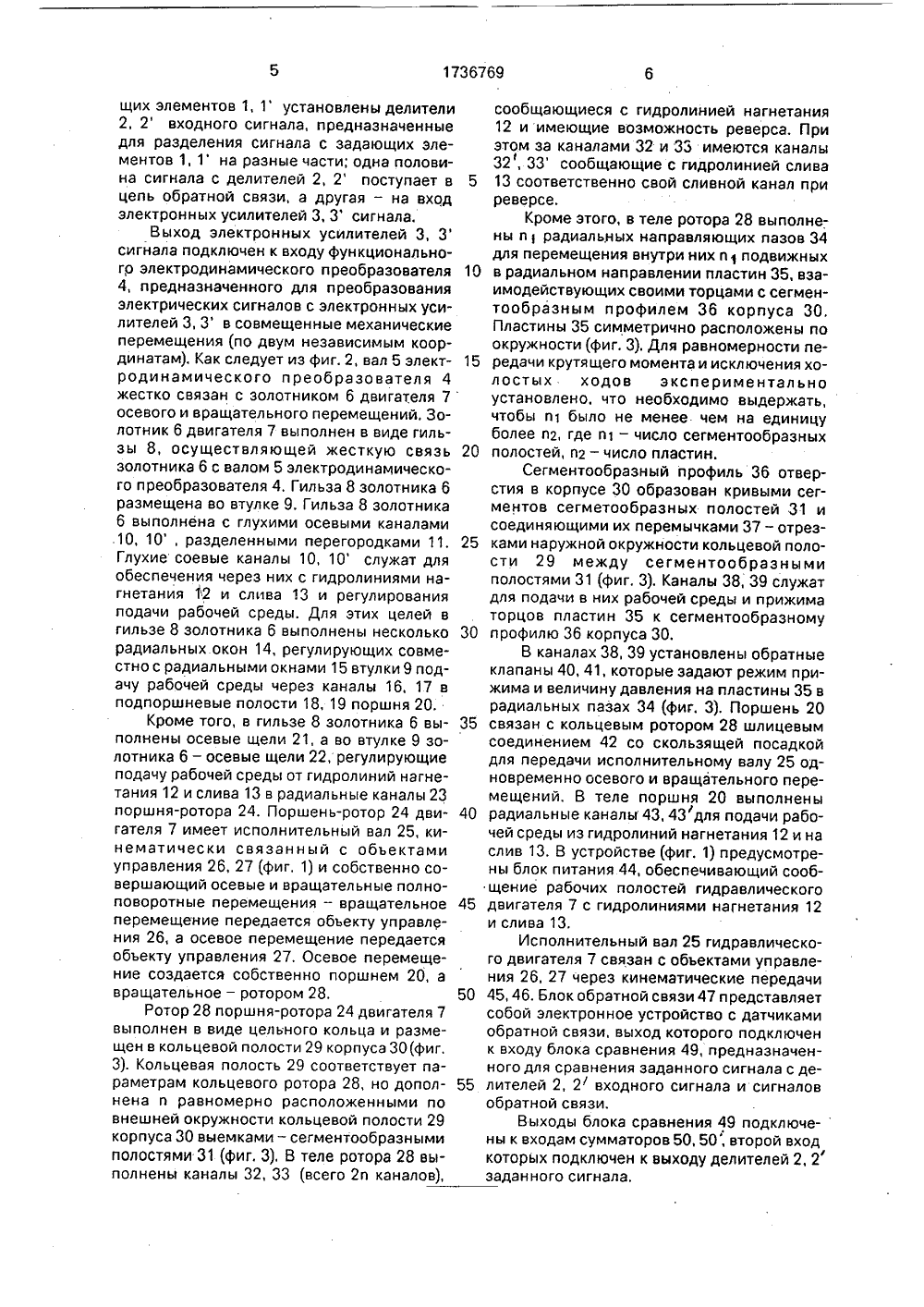
)5 В ПИСАНИЕ ИЗОБРЕТЕНИЯ ЪСТВУ ОРСКОУУ СВИ ГОСУДАРСТВЕ ННЫ Й КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(54) СИСТЕМА СОВМЕЩЕННОГО УПРАВЛЕНИЯ ПРИВОДАМИ ПО ДВУМ НЕЗАВИСИМЫМ КООРДИНАТАМ(57) Изобретение относится к системам автоматического комбинированного управления рулевыми, тормозными и другимиустройствами транспортных средств, а также для широкого круга других устройств, гденеобходимо совмещенное управление одновременно поворотным и осевым перемещениями. Цель изобретения - расширениефункциональных возможностей при одновременном обеспечении равномерности передачи крутящего момента, исключениехолостых ходов и упрощение системы, Кольцевая полость 29 корпуса 30 ротора дополнена п 1 равномерно расположенными по окружности сегментообразными полостями 31. Размещенный в этой полости ротор 28 выполнен в виде цельного кольца и имеет два п 2 каналов сообщения с гидролиниями нагнетания и слива и п 2 симметрично расположенных по окружности радиальных каналов для размещения подвижных в радиальном направлении пластин, взаимодействующих с сегментообразным профилем корпуса, при этом п 1 не менее чем на единицу больше п 2, но не более чем на три, Золотник размещен во втулке с радиальными окнами, при этом золотник и втулка имеют осевые щели, сообщающие гидролинии нагнетания и слива с рабочими полостями поршня-ротора. Поршень связан с кольцевым ротором 28 шлицевым соединением со скользящей посадкой, шлицы которого расположены по осям симметрии пластин ротора. В теле ротора выполнены каналы, в которых установлены обратные клапаны для прижима пластин к сегментообразному профилю корпуса. 10 ил.Изобретение относится к системам автоматического комбинированного управления рулевыми, тормозными и другими устройствами транспортных средств, а такжедля широкого круга другихустройств, где необходимо совмещенное управление одновременно поворотным и осевым перемещением.Известны системы управления одновременно двумя объектами, которые имеют самостоятельные каналы для управления двумя двигателями - независимым поршневым исполнительным механизмом, осуществляющим осевое перемещение и поворотным исполнительным двигателем, осуществляющим вращение,Наличие двух систем управления и двух независимых исполнительных механизмов при необходимости управления объектами по двум независимым координатам приводит к значительной сложности конструкции, а также к значительным габаритам и массам при ограниченных функциях: обеспечиваются либо только осевые, либо только поворотные движения исполнительных органов.Известен и выбран за прототип гидравлический следящий двигатель, который обеспечивает перемещение исполнительного вала по двум независимым координатам. Он содержит электродинамический преобразователь, управляемый каналом управления, двигатель осевого и вращательного перемещения, включающий золотник и поршень-ротор, объект управления, электродинамический преобразователь выполнен в виде управляемого двумя взаимосвязанными электродинамическими системами - поворотного и осевого перемещения - выходного вала, жестко связанного с гильзой золотника, которая размещена в отверстии поршня и выполнена с глухими осевыми каналами, разделенными перегородкой и радиальными окнами, сообщающими гидролинии нагнетания и слива с рабочими полостями поршня-ротора, который содержит указанный поршеньи ротор, размещенный в кольцевой полости корпуса, при этом ротор и поршень установлены с возможностью поворота и осевого перемещения исполнительного вала.Известный двигатель имеет возможность только неполных поворотных движений исполнительного вала, поскольку его ротор размещен в кольцевой полости корпуса и выполнен в виде подвижных и неподвижных лопастей. Кроме этого, в устройстве не предусмотрены средства, обеспечивающие равномерную передачу крутящего момента, Это ограничивает функциональные возможности устройства и, в случае необхо 5 10 15 20 25 30 35 40 45 50 55 димости получения сложного перемещения исполнительного вала, приводит к необходимости использования двух независимых систем управления с самостоятельными двигателями, что неоправдано дорого и сложно.Цель изобретения - расширение функциональных возможностей при одновременном обеспечении равномерности передачи крутящего момента, исключение холостых ходов и упрощение устройства.Поставленная цель достигается тем, что кольцевая полость корпуса ротора дополнена п 1 равномерно расположенными по окружности сегментообразными полостями, размещенный в этой полости ротор выполнен в виде цельного кольца и имеет два пг каналов сообщения с гидролиниями нагнетания и слива и пг симметрично расположенных по окружности радиальных каналов для размещения подвижных в радиальном направлении пластин, взаимодействующих с сегментообразным профилем корпуса, при этом п 1 не менее чем на единицу больше пг, но не более чем на 3, золотник размещен во втулке с радиальными окнами, при этом золотник и втулка имеют осевые щели, сообщающие гидролинии нагнетания и слива с рабочими полостями поршня-ротора, поршень связан с кольцевым ротором шлицевым соединением со скользящей посадкой, шлицы которого расположены по осям симметрии пластин ротора, в теле ротора выполнены каналы, в которых установлены обратные клапаны для прижима пластин к сегментообразному профилю корпуса.Сущность предложенного технического решения состоит в том, что в этой конструкции обеспечивается полноповоротное вращение и осевое перемещение исполнительного вала, что дает возможность управления по двум незавимым координатам с отслеживанием движения исполнительного вала.На фиг. 1 представлена блок-схема канала упоавления; на фиг. 2 - конструктивная схема гидравлического следящего двигателя, обеспечивающего управление по двум независимым координатам; на фиг. 3 - А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 2; на фиг, 6 - разрез Г-Г на фиг, 2; на фиг. 7 - узелна фиг. 6; на фиг. 8 - разрез Д - Д на фиг. 2; на фиг. 9 - разрез Е - Е на фиг. 2; на фиг.10 - разрез Ж - Ж на фиг. 2.Канал управления содержит (фиг. 1) задающие элементы 1, 1, которые предназначены для задания программы управления объектом, Программа сформирована в виде электрического сигнала. На выходе задающих элементов 1, 1 установлены делители 2, 2 входного сигнала, предназначенныедля разделения сигнала с задающих элементов 1, 1 на разные части; одна половина сигнала с делителей 2, 2 поступает вцепь обратной связи, а другая - на входэлектронных усилителей 3, 3 сигнала.Выход электронных усилителей 3, 3 сигнала подключен к входу функционального электродинамического преобразователя 4, предназначенного для преобразования электрических сигналов с электронных усилителей 3, 3 в совмещенные механическиеперемещения (по двум независимым координатам). Как следует из фиг. 2, вал 5 электродинамического преобразователя 4жестко связан с золотником 6 двигателя 7осевого и вращательного перемещений. Золотник 6 двигателя 7 выполнен в виде гильзы 8, осуществляющей жесткую связь золотника 6 с валом 5 электродинамического преобразователя 4, Гильза 8 золотника 6 размещена во втулке 9. Гильза 8 золотника 6 выполнена с глухими осевыми каналами10, 10, разделенными перегородками 11. Глухие соевые каналы 10, 10 служат для обеспечения через них с гидролиниями нагнетания Ф 2 и слива 13 и регулирования подачи рабочей среды. Для этих целей вгильзе 8 золотника 6 выполнены несколько радиальных окон 14, регулирующих совместно с радиальными окнами 15 втулки 9 подачу рабочей среды через каналы 16, 17 в подпоршневые полости 18, 19 поршня 20. 354045 5055 Кроме того, в гильзе 8 золотника 6 выполнены осевые щели 21, а во втулке 9 золотника 6 - осевые щели 22, регулирующие подачу рабочей среды от гидролиний нагнетания 12 и слива 13 в радиальные каналы 23поршня-ротора 24. Поршень-ротор 24 двигателя 7 имеет исполнительный вал 25, кинематически связанный с объектами управления 26, 27 (фиг, 1) и собственно совершающий осевые и вращательные полноповоротные перемещения - вращательное перемещение передается объекту управления 26, а осевое перемещение передается объекту управления 27, Осевое перемещение создается собственно поршнем 20, а вращательное - ротором 28.Ротор 28 поршня-ротора 24 двигателя 7 выполнен в виде цельного кольца и размещен в кольцевой полости 29 корпуса 30(фиг, 3). Кольцевая полость 29 соответствует параметрам кольцевого ротора 28, но дополнена и равномерно расположенными по внешней окружности кольцевой полости 29 корпуса 30 выемками - сегментообразными полостями 31 (фиг. 3), В теле ротора 28 выполнены каналы 32, 33 (всего 2 п каналов),1015202530 сообщающиеся с гидролинией нагнетания 12 и имеющие возможность реверса. При этом за каналами 32 и 33 имеются каналы 32, 33 сообщающие с гидролинией слива 13 соответственно свой сливной канал при реверсе.Кроме этого, в теле ротора 28 выполнены ирадиальных направляющих пазов 34 для перемещения внутри них иподвижных в радиальном направлении пластин 35, взаимодействующих своими торцами с сегментообразным профилем 36 корпуса 30, Пластины 35 симметрично расположены по окружности (фиг, 3). Для равномерности передачи крутящего момента и исключения холостых ходов экспериментально установлено, что необходимо выдержать, чтобы п было не менее чем на единицу более пг, где п 1 - число сегментообразных полостей, пг - число пластин.Сегментообразный профиль 36 отверстия в корпусе 30 образован кривыми сегментов сегметообразных полостей 31 и соединяющими их перемычками 37 - отрезками наружной окружности кольцевой полости 29 между сегментообразными полостями 31 (фиг, 3). Каналы 38, 39 служат для подачи в них рабочей среды и прижима торцов пластин 35 к сегментообразному профилю 36 корпуса 30.В каналах 38, 39 установлены обратныеклапаны 40, 41, которые задают режим прижима и величину давления на пластины 35 в радиальных пазах 34 (фиг, 3). Поршень 20 связан с кольцевым ротором 28 шлицевым соединением 42 со скользящей посадкой для передачи исполнительному валу 25 одновременно осевого и вращательного перемещений. В теле поршня 20 выполнены радиальные каналы 43,43 для подачи рабочей среды из гидролиний нагнетания 12 и на слив 13. В устройстве (фиг. 1) предусмотрены блок питания 44, обеспечивающий сообщение рабочих полостей гидравлического двигателя 7 с гидролиниями нагнетания 12 и слива 13.Исполнительный вал 25 гидравлического двигателя 7 связан с объектами управления 26, 27 через кинематические передачи 45,46. Блок обратной связи 47 представляет собой электронное устройство с датчиками обратной связи, выход которого подключен к входу блока сравнения 49, предназначенного для сравнения заданного сигнала с делителей 2, 2 входного сигнала и сигналов обратной связи.Выходы блока сравнения 49 подключены к входам сумматоров 50, 50; второй вход которых подключен к выходу делителей 2, 2 задан ного сигнала.10 15 20 25 30 35 40 45 50 55 На фиг. 1 показаны сумматоры 51, 51 жесткой единичной обратной связи по положению, имеющейся в гидравлическом двигателе 7 между золотником 6 и ротором 28.Устройство работает следующим образом.С задающих элементов 1, 1 (фиг. 1) заданный сигнал поступает в делитель 2, 2 входного сигнала, где он делится пополам и усиливается, Одна половина сигнала поступает на сумматоры 50, 50, а другая - в цепь обратной связи на вход блока сравнения 49 (фиг. 1), С выходов блока сравнения 49 сигнал поступает на входы сумматоров 50, 50, где суммируется с заданным сигналом иФ усиливается на электронных усилителях 3, 3 , С выхода электронных усилителей 3, 3 сигналы поступают на вход функционального электрического преобразователя 4, который выполнен в виде выходного вала 5 со сложным осевращательным движением, который управляется двумя связанными электромагнитнымии (электродинамическими) системами, одна .из которых создает осевое перемещение выходному валу 5, а другая сообщает ему (выходному валу 5) вращательное перемещение (фиг. 2).Выходной вал 5 жестко связан с гильзой 8 золотника 6, которая то же совершает вместе с валом 5 осевые и поворотные перемещения (фиг. 2).В этом случае рабочая среда поступает из гидролинии нагнетания 12 через радиальные каналы 43 поршня 20 в глухой осевой канал 10 гильзы 3 золотника, канал 1 в рабочую полость 18 поршня 20 (фиг, 2 - 4). Одновременно в момент перемещения золотника вниз по чертежу открываются радиальные окна 14 слива и рабочая жидкость из полости 19 поршня 20 поступает в глухой осевой канал 10 гильзы 8 и далее по радиальным каналам 43 в гидролинию слива 13 (фиг. 2 - 4). При этом поршень 20 перемещается вниз, Аналогично происходит открывание каналов при перемещении золотника вверх. При этом осевое положение поршня 20 пропорционально входному сигналу, Это достигается тем, что в этом положении гильзы 8 золотника 6 относительно втулки 9 радиальные окна 15 втулки 9 золотника 6 перекрыты радиальными окнами 14 гильзы 8 золотника 6 и эта величина перекрытия пропорциональна перемещению гильзы 8, т, е. входному сигналу. Следовательно, расход рабочей среды, подводимой в рабочие полости 18, 19 поршня 20,таков, что положение поршня 20 отслеживает положение гильзы 8 (фиг. 2),Поршень 20 перемещается до тех пор, пока радиальные окна 15 гильзы 8 золотника 6 не перекроются втулкой 9 относительногидролинии нагнетания 12,При осевом перемещении поршня 20элементы шлицевого соединения 4 скользятпо внутренним шлицам ротора 28. При вращательном движении ротора 28 поршень 20 поворачивается одновременно с ним, так как связан шлицевым соединением 42. Таким образом, исполнительный вал 25 можетпроизводить сложные полноповоротные иосевые перемещения,Это происходит следующим образом, Рабочая среда из глухого соевого канала 10 гильзы 8 золотника 6, который в это время сообщен с гидролинией нагнетания 12 через радиальные отверстия 43, осевые щели 21 и 22 соответственно гильзы 8 и втулки 9 золотника, радиальные каналы 23 поршня- ротора 24 и каналы 32 и 33 поступает в сегментообразные полости 31, при этом одна половина сегментообразной полости 31,которая разделена пластиной 35 на две части,сообщена с гидролинией нагнетания 12,а другая - с гидролинией слива 13,Под действием разности давления, оказываемого на пластину 35 с двух сторон и за счет неравенства давлений, оказываемых на пластину 35, поршень 24 под действием крутящего момента начинает поворачиваться. При этом поворот поршня-ротора 24 отслеживает поворотные положения гильзы 8 золотника 6 за счет перекрытия осевых щелей 21, 22 соответственно гильзы 8 и втулки 9 золотника 6.Прижим пластин 35 к сегментообразному профилю 36 осуществляется через сообщенные с гидролинией нагнетания 12 и слива 13 каналы 38, 39, в них установлены обратные клапаны 40, 41, которые пропускают рабочую среду из гидролинии нагнетания и запирают гидролинию слива 13. При этом за счет обратных клапанов 40, 41 в радиальном канале 34 устанавливается давление, необходимое для прижима пластин 35 к сегментообразному профилю 36. Шлицы шлицевого соединения 42 расположены между пластинами 35 и равноудалены от них, чем обеспечивается равномерная передача крутящего момента на исполнительный вал 25, который одновременно совершает осевое перемещение. Для тех же целей - равномерности передачи крутящего момента - необходимо, чтобы взаимно противоположные пластины 35 находились в процессе работы в противофазе или равномерно и взаимно противоположно перемещались друг по отношению к другу, исключая при этом холостые ходы. Установлено экспериментом, что это может быть достигнуто тем, что сегментообразн ые полости (иполостей)1736769 10 50 55 расположены равномерно по окружности, а радиальные пазы с пластинами (их п 2), симметрично расположены по окружности, при этом и не менее чем на единицу больше пг, но не более чем на 3, а также равномерным 5 размещением по окружности элементов шлицевого соединения.42.Положительный эффект предлагаемого устройства заключается в обеспечении полноповоротных вращений с одновременным 10 осевым перемещением исполнительного вала, что исключает необходимость установки двух следящих двигателей. Кроме этого, в устройстве передача полноповоротного вращения осуществляет ся при равномерной передаче крутящего момента, что достигается равномерным размещением шлицевых соединений между. каждой парой пластин, а также равномерным расположением пластин по окружно сти и симметричным расположением сегментообразных полостей.Еще одно преимущество устройства состоит в том,что в конструкции обеспечивается слежение исполнительного вала за 25 входным сигналом как при его вращении,- так и при его осевом перемещении. Формула изобретенияСистема совмещенного управления 30 приводами по двум независимым координатам, содержащая последовательно соединенные задающие элементы, делитель входного сигнала, сумматор, электронный усилитель, электродинамический преобра зователь, двигатель осевого и вращательного перемещений, включающий золотник, и поршень-ротор, объект управления, блок обратной связи с электронным усилителем, блок сравнения, выходы которого подклю цены к входам сумматоров, при этом электродинамический преобразователь выполнен в виде управляемого двумя взаи- . мосвязанными электродинамическими сис 45 темами поворотного и осевого перемещения выходного вала, жестко связанного с гильзой золотника, которая выполнена с глухими осевыми каналами, разделенными перегородкой, и размещена в отверстии поршня, при этом гильза золотника выполнена с радиальными окнами, сообщающими гидролинии нагнетания и слива с рабочими полостями поршня-ротора, который содержит указанный поршень и ротор, размещенный-в кольцевой полости корпуса, при этом ротор и поршень установлены с возможностью поворота и осевого перемещения исполнительного вала, о т л и ч а ю щ а я с я тем, что, с целью расширения функциональных возможностей при одновременном обеспечении равномерности передачи крутящего момента, исключения холостых ходов, упрощения устройства, кольцевая полость корпуса ротора выполнена с п равномерно расположенными по окружности сегментообразными полостями, размещенный в упомянутой:полости ротор выполнен в виде цельного кольца и снабжен двумя п 2 каналами сообщения с гидролиниями нагнетания и слива и п 2 симметрично расположенными по окружности радиальными пазами для размещения подвижных в радиальном направлении пластин, взаимодействующих с сегментообразным профилем корпуса, при этом п 1 не менее чем на единицу больше пг, но не более чем на 3, золотник размещен во втулке с радиальными окнами, при этом золотник и втулка имеют осевые щели; сообщающие гидролинии нагнетания и слива с рабочими полостями поршня-ротора, поршень связан с кольцевым ротором шлицевым соединением со скользящей посадкой, шлицы которого расположены на осях симметрии пластин ротора, в теле ротора выполнены каналы, в которых установлены обратные клапаны для прижима пластин к сегментообразному профилю корпуса поршня-ротора.17367691 Еог,В игРг. 70Составитель А. Барыков Редактор М. Товтин Техред. М, Моргентал Корректор А, Осауленк аказ 1858 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб 4/5изводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина
СмотретьЗаявка
4872087, 24.08.1990
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "СОЮЗ"
БАРАНОВ ВИКТОР НИКОЛАЕВИЧ, ПРЕОБРАЖЕНСКИЙ РОСТИСЛАВ ИВАНОВИЧ
МПК / Метки
МПК: B60K 41/00
Метки: двум, координатам, независимым, приводами, совмещенного
Опубликовано: 30.05.1992
Код ссылки
<a href="https://patents.su/9-1736769-sistema-sovmeshhennogo-upravleniya-privodami-po-dvum-nezavisimym-koordinatam.html" target="_blank" rel="follow" title="База патентов СССР">Система совмещенного управления приводами по двум независимым координатам</a>
Устройство для защиты обмотки ротора синхронной машинб1 от замыканий на корпус в одной точке

Номер патента: 279762
Опубликовано: 01.01.1970
Авторы: Белорусский, Мороз, Новаш, Рогов, Яатбпий
Метки: замыканий, защиты, корпус, машинб1, обмотки, одной, ротора, синхронной, точке
...б подсоединено к выусилителя,1Изобретение относится к устройствам для защиты обмотки ротора синхронных машин от замыканий на корпус в одной точке.Известные усгройства такого назначения, сэдержащие блэк питания, измерительный и исполнительный органы, не обеспечивают 100% -ной защиты обмоток ротора.Предлагаемое устройство отличается от известных тем, что измерительный орган выполнен на магнитном усилителе, обмотка управления которого включена между шиной возбуждения и корпусом ротора.Это позволяет устранить мертвую зону защиты и повысить чувствительность устройства.На чертеже представлена принципиальная схема устройства.Источник питания 1 подключен к магнитному усилителю 2,. снабженному рабочими обмотками 2 а, обмотками смещения 2 б и...
Способ пайки корпуса инструмента с режущей пластиной

Номер патента: 591287
Опубликовано: 05.02.1978
Авторы: Дубровин, Маршенников
МПК: B23K 31/04
Метки: инструмента, корпуса, пайки, пластиной, режущей
...помещают проволоку 3 с нанесенным на нее припоем 4, при этом концы проволоки скрепляют с державкой инструмента, например, точечной сваркой. Собранный инструмент устанавливают в контейнер и паяют в вакууме с соответствующей температурой и выдержкой. Возможна пайка в инертном газе. 2 З В процессе распыления припой стекает с проволоки и заполняетзазоры между державкой инструмента и пластиной, которая всплывает и соприкасается с проволокой. В процессе заточки инструмента проволоку срезают.Перемещение пластины обеспечивает необходимую толщину слоя припоя между пластиной и державкой инструмента.Использование предлагаемого способа пайки пластин из сверхтвердых синтетических материалов позволяет обеспечить высокое качество пайки за счет...
Рабочий ротор для автоматических роторных линий

Номер патента: 1698085
Опубликовано: 15.12.1991
Авторы: Каргальцев, Куланов
МПК: B30B 11/12
Метки: автоматических, линий, рабочий, ротор, роторных
...матрица 32 и контрпуансон 33, разжатые пружинами 34, с воэможностью перемещения на контрпуансоне размещен сьемник 35, взаимодействующий с кольцевой деталью 36 и выталкивателями 37,Подача рабочей жидкости от насоса 38 через гидрораспределитель 39 производится к боковой поверхности силового гидро- цилиндра по каналу 20, в поршневую полость силового гидроцилиндра через клапан 40 давления, по каналу 41 и к вспомогательному гидроцилиндру 24 по каналу 42, Параллельно клапану давления подсоединен обратный клапан 43. Слив жидкости от насоса производится через рагрузочный клапан 44, который срабатывает при максимальной рабочей нагрузке. Рабочий ротор приводится во вращение через зубчатое колесо 45 и взаимодействует с ротором 46...
Поворотный золотник для автоматического прекращения свободного впуска пара в золотниковую коробку паровоза при буксовании паровоза

Номер патента: 6746
Опубликовано: 31.10.1928
Автор: Харитонов
МПК: B61C 17/00
Метки: буксовании, впуска, золотник, золотниковую, коробку, пара, паровоза, поворотный, прекращения, свободного
...пара в шиберный ящик станет невозможной. Образовавшееся вслед за сим давление в коробке А, равное по величине таковому в камере а, погонит незначительной струей пар в машину сквозь узкую (миллиметровую) щель между цилиндрическими поверхностями коробки А и заслонкой золотника Д; Это медленное истечение пара в шиберный ящик плавно раздвинет внутренние диски золотника, избежав тем самым разрушительного удара их об наружные (скалка). В то же время, благодаря действию пара, проникающего сквозь отверстие лс, на правую сторону поршенька Ж, последний в отношении давлений пара окажется уравновешенным. Наличие этого обстоятельства позволит противовесу Ы возвратить золотник в его первоначальное положение (фиг. 1), в силу чего немедленно...
Двухконтурный гидравлический привод тормозной системы транспортного средства

Номер патента: 727495
Опубликовано: 15.04.1980
Авторы: Баранчик, Денисов, Тарасевич, Чернышева
МПК: B60T 13/14
Метки: гидравлический, двухконтурный, привод, системы, средства, тормозной, транспортного
...давления вгидро- аккумуляторах золотник 41 под действием пружины 45 перекрывает сливную магистраль 46, и насос 2 подает рабочую жидкость по каналам 35 и 36 в полости 37 и 38 регуляторов и далее по трубопроводам 39 и 40 в гидроаккумуляторы 3 и 4. При этом клапан 17 под действием регулировочной пружины 19 через сухарь 18 прижат к своему седлу гильзы 11, а клапан 9 посредством золотника-толкателя 13 отжат от седла, и жидкость через образовавшийся зазор между клапаном 9 и седлом, канал 12 в гильзе проходит к разделительному клапану 21 и далее через дроссельное отверстие 42 золотника 41 отключения насоса в полость 43 и обеспечивает удержание золотника 41 в положении, когда линия нагнетания 34 разобщена с линией слива 46. Таким образом...
Предыдущий патент: Устройство для управления акселератором транспортного средства
Следующий патент: Система управления гидромеханической коробкой передач транспортного средства
Случайный патент: Способ индукционного нагрева кромок под сварку