Способ резервирования электрогидравлической системы регулирования частоты вращения и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1174579
Авторы: Абрамов, Горбунов, Киреев, Колосов, Коробенков, Коссов, Попов, Серегин, Швайнштейн

Текст
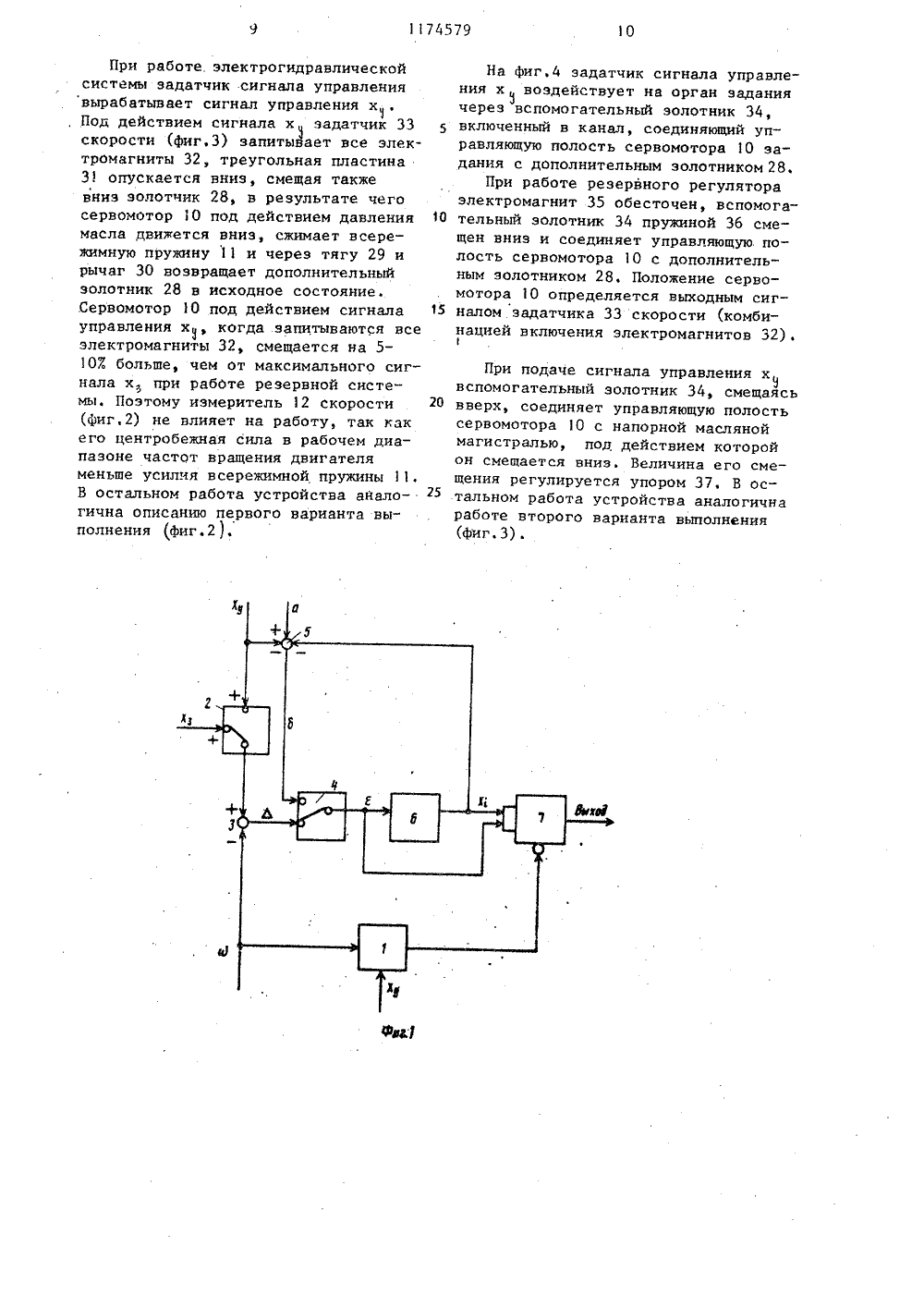
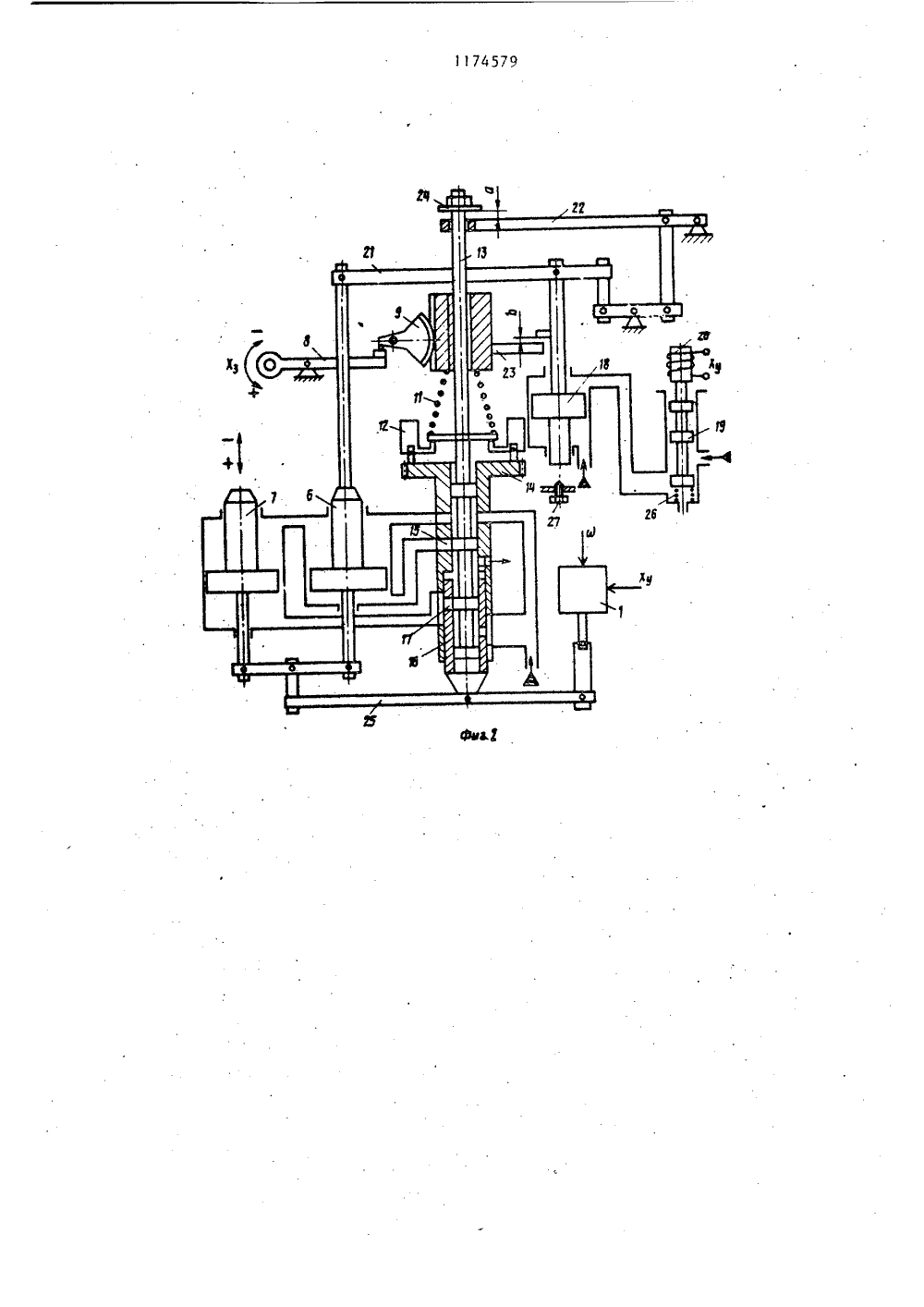
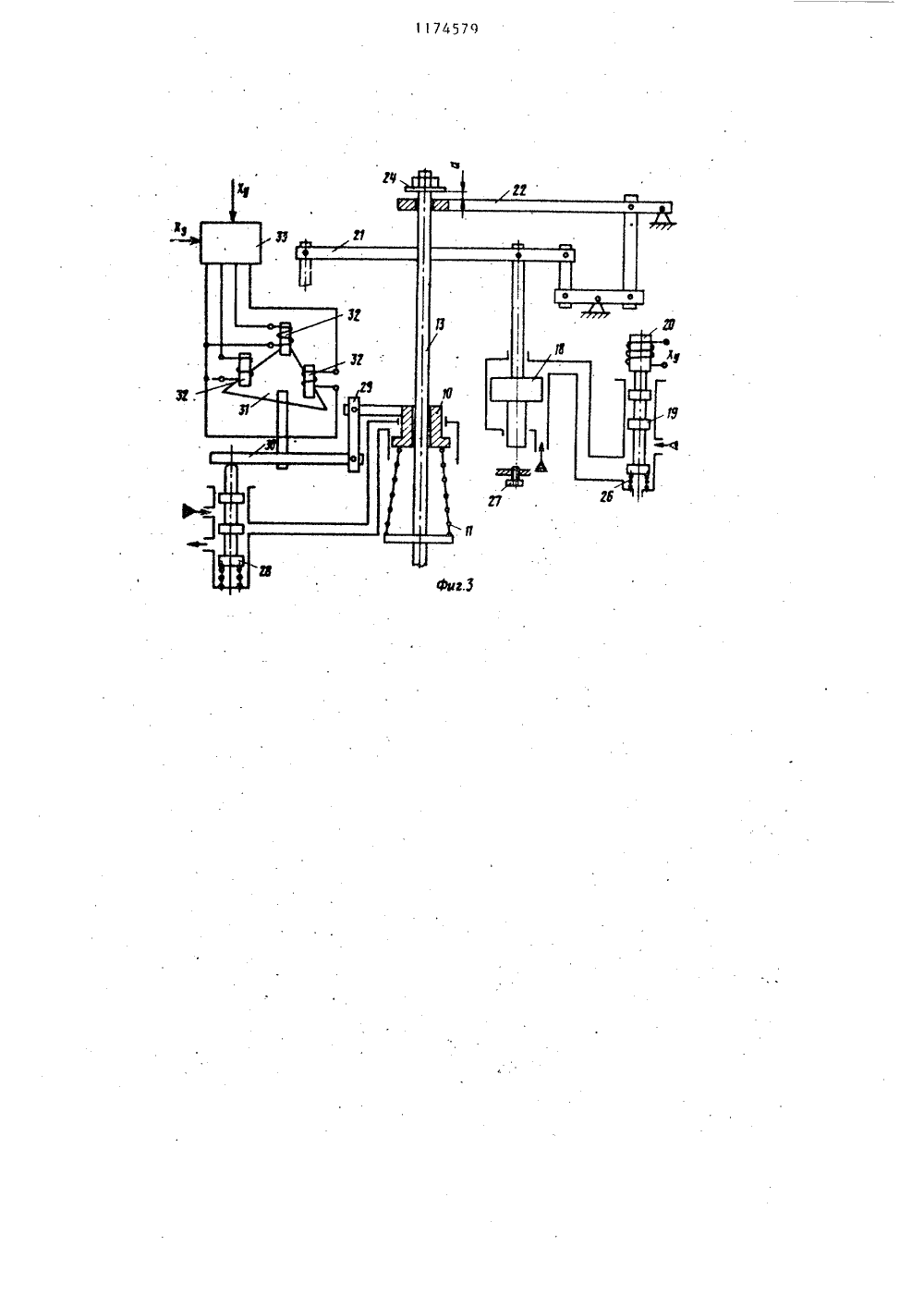
(51) 4 ОПИСАНИЕ ИЗОБРЕТ ов,троител ЭЛЕКТРОЛИРОВАНИЯВО ДЛЯ сигнал задания тройств ля резервирования кой системы регувращения преимуя внутреннего сгогидромеханичесМийный измерителем ктрогидравлич ания частоты ественно двигат рания, содержащее регулятор, снабже ращения, м управл членен е астоты ым вход отником ации ст ющего орган1 М С УЗЛОМ с песвяэаннатизма и серполнитель мотором и ч а ю щ е е с я повьппения экономичи двигателя, оно до. жит механизм управм сигнала управлетем, что, с цельюности и надежнос олнительно соде ени задатчи ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ К АВТОРСКОМУ СВИДЕТЕЛЬСТ(71) Коломенский тепловозоный завод им. В.В.Куйбьппев(54) СПОСОБ РЕЗЕРВИРОВАНИЯГИДРАВЛИЧЕСКОЙ СИСТЕМЫ РЕГУЧАСТОТЫ ВРАЩЕНИЯ И УСТРОЙСЕГО ОСУЩЕСТВЛЕНИЯ.(57) 1. Способ резервирования электрогидравлической системы регулирования частоты вращения преимущественно двигателя внутреннего сгорания,заключающийся в том, что вырабатывают сигнал электрогидравлической системы, на вход гидромеханического регулятора подают сигнал задания, вырабатывают сигнал ошибки, равный разности между сигналом задания и сигналом, соответствующим замереннойчастоте вращения двигателя, и сигналпропорциональный сумме сигнала ошибки и интеграла от сигнала ошибки, ивоздействуют при помощи исполнительного сервомотора на орган топливоподачи двигателя, о т л и ч а ю щ и й -с я тем, что, с целью повьппения эко омичности и надежности двигателя вырабатывают сигнал управления, пр помощи которого включают электроги равлическую систему и одновременно отключают гидромеханический регулятор путем выбора из сигналов управления и задания максимального сигнала, формирования первого сигнала рассогласования, равного разности между мак симальным сигналом и сигналом, соответствующим замеренной частоте вращения двигателя, второго сигнала рассог ласования, равного алгебраической сумме сигналов управления и интервала от сигнала ошибки, придания величине сигнала ошибки, меньшего иэ значений первого и второго сигналов рассогласования, причем на второй вход исполнительного сервомотора подают сигнал электрогидравлической системы.2. Способ по п.1, о т л и ч а ю - щ и й с я тем, что, с целью исключения влияния гидромеханического регулятора на работу электрогидравлической системы во всем диапазоне изменения частоты вращения двигателя, сигнал управления по величине подают с превьппением максимального значения1174579 ния, соединенным с органом задания, и суммирующий элемент с двумя входами и одним выходом, причем к его первому входу подключен узел компенсации статизма, к второму - механизм управ ления, выход - к золотнику управляющего органа, а электрогидравлическая система подключена к второму входууправляющего органа.4. Устройство по п.З, о т л и - ч а ю щ е е с я тем, что задатчик сигнала управления связан с органом задания через механизм управления.5, Устройство по пп. 3 и 4, о т - л и ч а ю щ е е с я тем, что механизм управления выполнен в виде сервомотора, снабженного золотником с электрическим приводом.6. Устройство по пп.3 в 5, о т л ич а ю щ е е с я тем, что сервомотор механизма управления соединен с,орга. оном задания, а выход суммирующего элемента связан с золотником управИзобретение относится к машиностроению,в частности, к дьигателестроению,а именно к способу и устройствам резервирования электрогидравлической системы регулированиячастоты вращения,5 преимущественно внутреннего сгорания.Цель изобретения - повьппение экономичности и надежности двигателя путем обеспечения всережимной работы резервного регулирования и использования одного исполнительного сервомотора.На фиг.1 представлена блок-схема системы регулирования; на фиг.2 - первый вариант устройства, реализующего способ резервирования; на фиг.З второй вариант устройства, реализующего способ резервирования; на фиг,4 вариант выполнения органа задания.Система регулирования (фиг,)содержит электрогидравлическую систему 1 и резервный регулятор, состоящий из первого селектора 2, первого сумматора 3, второго селектора 4, второго сумматора 5, интегратора 6 (устройства компенсации статизма) ляющего органа при помощи односторонних упоров,7, Устройство по пп. 3,5 и 6,о т л и ч а ю щ е е с я тем, чтоорган задания выполнен в виде электрогидравлического следящего привода,снабженного эадатяиком частоты вращения, дополнительным золотником игидравлическим исполнительным сервомотором задания, управляющая полостькоторого соединена с:дополнительнымзолотником при помощи канала,8. Устройство по пп, 3,5-7, о т - л и ч а ю щ е е с я тем, что задатчик сигнала управления подключен к зад.тчику частоты вращения следящего привода.9, Устройство по пп. 3,5,7, о т - л и ч а ю щ е е с я тем, что в кана. ле установлен вспомогательный золотник, связанный с задатчиком сигнала управления,и исполнительного сервомотора 7,имеющего первый и второй входы. На вход первого селектора 2 поступавт сигналы задания хи управле 3ния х , Селектор 2 производит операцию выбора макс, (х, х). Поскольку сигнал хпревыщает максимальный сигнал х, то выходной .сигнал селектора 2 равен х при отсутствии сигнала управления и х при его подаче. Первый сумматор 3 измеряет первый сигнал рассогласования 6 между выходным сигналом первого селектора 2 и фактической частотой вращения я двигателя. Одновременно во втором сумматоре 5 формируется второй сигнал рассогласования о как алгебраическая сумма сигнала управления х, сигнала хинтегратора 6 и постоянной составляющей а. Сигналы рассогласования ц и о поступают во второй селектор 4, выходной сигнал которого является сигналом о 1 пибки Е . Второй селектор 4 производит операцию выбора мин Ь,8), т.е б=й, при8 и Г=3, при 31174579 при наличии рассогласования Ь, Частота вращения двигателя определяется уровнем сигнала задания х , который изменяется от минимального до макси мального в зависимости от условий работы двигателя., Таким образом обеспечивается всережимность резервного регулирования.Первый вариант устройства (фиг.2),реализующего предложенный способ, содержит задатчик сигнала управления (не показан), Формирующий сигнал управления х , задающий рычаг 8, воздействующий через сектор 9 на орган 5 1 О задания измерителя скорости, выполненный в виде стакана и задающий натяжение всережимной пружины 11, измеритель 12 скорости, управляющий орган, содержащий золотник 13, буксу 0 14 с управляющим окном 15, втулку 16с управляющим окном 17, перемещающуюся в буксе 14, устройство 6 компенсации статизма (интегратор), представляющее собой сервомотор цифференци ального типа, управляющая (нижняя)полость которого соединена с окном 15 буксы 14, исполнительный сервомотор 7 также дифференциального типа, уп - равляющая полость которого соединена с окном 17 во втулке 16, механизм управления, выполненный в виде сервомотора 18 дифференциального типа, управляющая (верхняя) полость которого соединена золотником 19 с электрическим приводом 20, суммирующий элемент, выполненный в виде суммирующего рычага 21, соединенного с сервомотором 6, сервомотором 18 и взаимодействующего через рычажную передачу 22 с золотником 13. Сервомотор 18 воздействует на стакан 10, а рычаг 22 - на золотник 13 с помощью односторонних упоров 23 и 24, жестко связанных соответственно со стаканом 1 О и золотником 13.Сервомоторы 6 и 7 электрогидравлической системы 1 сочленены с втулкой 16 рычажной передачей 25. Измеритель 12 скорости получает вращение от коленчатого вала двигателя,(привод измерителя скорости не показан),;Устройство работает следующим образом.При необходимости осуществления резервного регулирования, связанного, например, с отказом основной электро- гидравлической системы 1, снимается сигнал управления х который отклю 5%чает электрогидравлическую систему Способ реализуется следующим образом.На первый вход 8 исполнительного сервомотораподают выходной сигнал электрогидравлической системы 1, на второй вход 9 - сигнал, пропорциональный сумме сигнала ошибки Я и интеграла от сигнала ошибки х а исполнительным сервомотором 7 управляют органом непоказан ) топливоподачи двигателя.При работе электрогидравлической системы 1 ее выходным сигналом через сервомотор 7 управляют органом топливоподачи двигателя, а с целью исключения влияния резервного регулятора иа работу всей системы величине сигнала ошибкии величине интеграла от сигнала ошибких; задают постоянное значение. Для этого подают сигнал управления х на электрогидрав. лическую систему 1, на вход второго сумматора 5 и через первый селектор 2 на вход первого сумматора 3. Сигнал х включает в работу электрогидравлическую систему 1Параметр 0 выбран таким образом, что в этом случае ьо и сигнал ошибкивторым селектором 4 приравнивается второму сигналу рассогласования 1, благодаря З 0 чему интегратор через второй сумма - тор 5 и второй селектор 4 охватывается жесткой отрицательной обратной связью, Вследствие этого сигнал ошибкистановится равным нулю, а выход ной сигнал х интегратора - постоян 1ной величине, определяемой уровнем сигнала х и параметра аПри необходимости включения в работу резервного регулятора, например, 40 в связи с отказом электрогидравлической системы, последнюю отключают, снимая сигнал управлеция х. При этом . сигнал х снимается также с второго сумматора 5 и первого селектора 2. 45В этом случае 3 Ь и сигнал ошибкиселектором 4 приравнивается первому сигналу рассогласования, обратная связь интегратора 6 разрывается. Сигнал ошибки 1: , изменяясь в соответ 50 ствии с разностью сигнала задания х 5 .и фактической частотой вращения двигателя, поступает на второй вход 9 сервомотора ,фна который заводится также интеграл х, от сигнала ошибки. 55 Сумма указанных сигналов Е и х управляет сервомотором 7, который перемещает орган тонливоподачи двигателя1, переводя ее выходной орган в риксированное положение, и обесточиваетэлектромагнит 20, в результате чегозолотник 19 с электрическим приводомпод действием пружины 26 перемещается вверх, соединяя управляющую (верхнюю) полость сервомотора 18 со сливом, Сервомотор 18 под действием давления, поступающего в нижнюю полость, Оперемещается вверх до механическогоупора, поднима 4 суммирующий рычаг 21вверх, а рычаг 22 вниз, и освобождает стакан 10 и золотник 13. Между рычагом 22 и упором 24 и .сервомотором1518 и упором 23 образуются соответственно зазоры а, и в. Положение стакана 1 О, а следовательно, и усилие всережимной пружины 11 определяется сигналом х задающего рычага 8. На установившемся режиме работы двигателяусилие всережимной пружины 11 равноцентробежной силе измерителя 2 скорости, и золотник 13, сочлененный сизмерителем 12 скорости, находится/в равновесном среднем положении,при котором он своими управляюшимипоясками перекрывает управляющие окна 15 в буксе 14 и окна 17 во втулке16, вследствие чего сервомоторы 6 и7 неподвижны и занимают положение,при .котором подача топлива в двигатель соответствует нагрузке,При изменении сигнала задания х, 35 например, в сторону увеличения сектор 9 через стакан 10 затягивает всережимную пружину 11, равновесие золотника 13 нарушается и он опускается вниз, соединяя управляющую по О лость сервомотора 6 через окно 15 с напорной полостью, а управляющую полость сервомотора 7 через окно 17 со сливной. Движение сервомотора 6 через рычажную передачу 25 передает в 45 ся втулке 16, которая под действием сервомотора 6 еще больше открывает окно 17. Сервомотор 7 смещается вниз и перемещает орган топливоподачи двигателя в сторону увеличения пода чи топлива. Частота вращения двигателя возрастает до тех пор, пока центробежная сила измерителя 12 не станет равной усилию пружины 11 и зо. лотник не перекроет регулирующее ок но 15. При этом втулка 16 также занимает исходное положение под действием обратной связи от сервомотора 7, осуществляемой через рычажную передачу 25,При нарушении равновесия, связанном, например, с увеличением нагрузки на двигатель, частота вращенияуменьшается, и золотник 13 смещаетсявниз, При этом так же, как описановьппе, сервомотор 7 увеличивает подачутоплива до тех пор пока частота вращения не восстановится, На новом установившемся режиме золотник 13 и втулка 16 занимают исходное состояние,смещение сервомотора 7 в сторону подачи топлива скомпенсировано пропорциональным перемещением сервомотора6, При этом исключается влияние сервомотора 6 на положение золотника 13,так как между рычагом 22 и упором 24имеется зазор а при всех положенияхсервомотора 6,При работе основной электрогидравлической системы 1 задатчик сигналауправления подает сигнал управлениях у, который включает электрогидравлическую систему и одновременно,запитывает электромагнит 20, которыйопускает золотник 19 вниз. Золотник19 соединяет управляющую полость сер.вомотора 18 с напорной масляной магистралью, и сервомотор 18 перемещается вниз. При перемещении вниз сервомотор выбирает зазор в и смещаетстакан 1 О, который затягивает пружи 1ну 11. Ход сервомотора 18 регулируется винтом 27 и выбирается таким,чтобы усилие пружины 11 под действием перемещения стакана 1 О от сервомотора 18 было больше на 5-10 Е,чем от максимального сигнала заданиях 5. При этом сектор 9 поворачиваетсяпо часовой стрелке, и его левыйупор отрывается от задающего рычага8, Однако золотник 13 в этом случаене смещается вниз, так как сервомотор 18 одновременно через суммирующий рычаг 21 поднимает рычаг 22, который выбирает зазор а и, воздействуя на упор 24, поддерживает золотник в среднем положении, Таким образом,. сервомотор 6 посредством рычага 21, рычажной передачи 22 и упора24 охватывается жесткой отрицательной обратной связью, благодаря чемуон занимает строго определенное положение, а золотник 13 - среднее положение, при котором его рабочийпоясок перекрывает управляющее окрого связана с треугольной пластиной31, перемещающейся под действием электромагнитов 32, подключ нных к задатчику 33 скорости. На эадатчик 33 скорости воздействует сигнал заданиях9и может также воздействовать эадатчик сигнала управления х. Остальныеэлементы устройства те же, что на 10 фиг.2, на фиг.З не показаны.Устройство работает следующим образом.При работе резервной системы сигнал х отсутствует, сервомотор 18 15 находится на верхнем упоре, междуупором 24 и рычагом 22 имеется зазорСигнал х 1 задает комбинацию включения электромагнитов 32 (кроме комбинации, при которой включены все 20 магниты) определяющую положение сервомотора 10, натяжение всережимнойпружины.11 и, следовательно, частотувращения двигателя.На установившемся режиме дополни тельныи золотник 28 перекрывает управляющую полость сервомотора 10,вследствие чего он неподвижен, ачастота вращения двигателя соответствует натяжению всережимной пружи ны 11. При необходимости изменениячастоты вращения, например в сторону увеличения, сигналом хзадаетсядругая комбинация включения электро. магнитов 32,.под действием которыхтреугольная пластина 31, через рычаг30 опускает вниз дополнительный золотник 28, соединяющий управляющуюполость сервомотора 1 О с напорноймасляной магистралью. Сервомотор 10 40 под действием давления масла опускается вниз, сжимает всережимнуюпружину 11 и одновременно через тягу 29 и рычаг 30 возвращает дополнительный золотник 28 в исходное поло жение, после чего он останавливается. но 15 в буксе 14. Если под действием сервомотора 18 золотник 13.оказывается не в среднем положении, а например, вышее, то он через окно 15 сообщает управляющую полость сервомо тора 6 со сливом и сервомотор 6 перемещается вниз, устанавливая золотник 13 в исходное среднее положение через рычаг 21 и рычажную передачу 22. Положение сервомотора 6 в дальнейшем не изменяется, так как оно определяется постоянными величинами, а именно: ходом сервомотора 18, параметрами рычажных передач 21 и 22 и положением упора 24 относительно золотника 13. Таким образом, золотник 13 и сервомотор 6, определяющие соответственно сигнал ошибки с (фиг.1) и интеграл х, от сигнала ошибки, занимают строго определенное положение и не влияют на работу элек. трогидравлической системы 1. Для электрогидравлической системы 1 в качестве исполнительного механизма используется сервомотор 7 (фиг.2) резервного регулятора. В этом случае сервомотором 7 управляет втулка 16 На установившемся режиме она занимает среднее положение и окно 17 перекрыто пояском золотника 13. При изменении выходного сигнала электро- гидравлической системы 1, связанным, например, с изменением нагрузки двигателя, выходной орган электрогидрав лической системы 1 перемещает, например вниз, правый конец рычага 25 и втулку 16, окно 17 которой, а следовательно, и управляющая полость сервомотора 7 соединяются с напорной магистралью. Сервомотор 7 перемещается вверх, уменьшая подачу топлива в двигатель, и возвращает через рычажную передачу, 25 втулку 16 в исходное состояние.Второй вариант устройствафиг,З) отличается тем, что сервомотор 18 механизма управления воздействует только на суммирующий рычаг 21, а орган задания выполненв виде электрогидравлического следящего привода, включающего гидравлический исполнительный орган 10 задания (сервомотор), управляющая (верхняяю) полость которого соединена с дополнительным золотником 5 28. Сервомотор задания 1 О охвачен отрицательной обратной связью через тягу 29 и рычаг 30, средняя точка котоВозросшее усилие всережимной пружины 11 нарушает равновесие золотника13, в результате чего он опускается 50 вниз, а сервомотор 7 (фиг.21, какэто описано выше, смещается в сторону увеличения подачи топлива, приэтом частота вращения двигателя возрастает до значения, при котором зо лотник 13 занимает исходное среднееположение. Так осуществляется позиционное резервное всережимное регулнрование частоты вращения.При работе. электрогидравлическойсистемы задатчик сигнала управлениявырабатывает сигнал управления х., Под действием сигнала х задатчик 33скорости (фиг.З) запитывает все электромагниты 32, треугольная пластина3 опускается вниз, смещая такжевниз золотчик 28, в результате чегосервомотор 10 под действием давлениямасла движется вниз, сжимает всережимную пружину 11 и через тягу 29 ирычаг 30 возвращает дополнительныйзолотник 28 в исходное состояние.Сервомотор 10 под действием сигналауправления х, когда эапитываются всеэлектромагниты 32, смещается на 5107 больше, чем от максимального сигнала х, при работе резервной системы. Поэтому измеритель 12 скорости(фиг.2) не влияет на работу, так какего центробежная сила в рабочем диапазоне частот вращения двигателяменьше усилия всережимной пружины 11,В остальном работа устройства аналогична описанию первого варианта выполнения (фиг.2),На фиг.4 задатчик сигнала управления х воздействует на орган задания через вспомогательный золотник 34, включенный в канал, соединяющий управляющую полость сервомотора 10 задания с дополнительным золотником 28,При работе резервного регулятораэлектромагнит 35 обесточен, вспомога тельный золотник 34 пружиной 36 смещен вниз и соединяет управляющую полость сервомотора 1 О с дополнительным золотником 28, Положение сервомотора 1 О определяется выходным сиг налом.задатчика 33 скорости (комбинацией включения электромагнитов 32) . При подаче сигнала управления хвспомогательный золотник 34, смещаясь 20 вверх, соединяет управляющую полостьсервомотора 1 О с напорной масляноймагистралью, под действием которойон смещается вниз. Величина его смещения регулируется упором 37, В остальном работа устройства аналогичнаработе второго варианта выполнения174579 оставитель В.СлавниковТехред Т,Фанта Корректор М,Максимишинец Редактор А.Саб ППП "Патент", г. Ужгород, ул. Проектная, 4 Фил Заказ 5156/33 Тираж 538ВНИИПИ Государственногпо делам изобретений 113035, Москва, ЖПодписноекомитета СССРоткрытийРаушская наб., д. 4/
СмотретьЗаявка
3582782, 22.04.1983
КОЛОМЕНСКИЙ ТЕПЛОВОЗОСТРОИТЕЛЬНЫЙ ЗАВОД ИМ. В. В. КУЙБЫШЕВА
АБРАМОВ СЕРГЕЙ АЛЕКСЕЕВИЧ, ГОРБУНОВ ОЛЕГ АНДРЕЕВИЧ, КИРЕЕВ АЛЬБЕРТ НИКИТОВИЧ, КОЛОСОВ БОРИС ПЕТРОВИЧ, КОРОБЕНКОВ АНАТОЛИЙ ИВАНОВИЧ, КОССОВ ЕВГЕНИЙ ЕВГЕНИЕВИЧ, ПОПОВ АНАТОЛИЙ МИХАЙЛОВИЧ, СЕРЕГИН ВЛАДИМИР НИКОЛАЕВИЧ, ШВАЙНШТЕЙН БОРИС СИМОНОВИЧ
МПК / Метки
МПК: F02D 31/00
Метки: вращения, резервирования, системы, частоты, электрогидравлической
Опубликовано: 23.08.1985
Код ссылки
<a href="https://patents.su/9-1174579-sposob-rezervirovaniya-ehlektrogidravlicheskojj-sistemy-regulirovaniya-chastoty-vrashheniya-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ резервирования электрогидравлической системы регулирования частоты вращения и устройство для его осуществления</a>
Система регулирования частоты вращения ротора низкого давления газотурбинного двигателя
Номер патента: 1066265
Опубликовано: 15.05.1994
Авторы: Гильчик, Душиц-Коган, Саркисов, Свитский, Черноморский, Юсупов
МПК: F02C 9/28
Метки: вращения, газотурбинного, давления, двигателя, низкого, ротора, частоты
1. СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА НИЗКОГО ДАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ, содержащая последовательно соединенные датчик частоты вращения ротора, блок сравнения с задатчиком, усилитель, воздушный редуктор и регулятор перепада давления на турбине, отличающаяся тем, что, с целью повышения быстродействия без снижения запасов устойчивости, она дополнительно содержит сумматор, включенный в линию связи усилителя и воздушного редуктора, логический блок и последовательно соединенные датчик положения исполнительного органа воздушного редуктора, дифференцирующее звено и блок коммутации, второй вход которого через логический блок связан с выходом блока сравнения, а выходом - с одним из входов сумматора.2. Система по п. 1,...
Система регулирования частоты вращения вала двигателя внутреннего сгорания

Номер патента: 1741107
Опубликовано: 15.06.1992
Авторы: Азбель, Бородянко, Гладышев, Лосев, Михальский, Усков, Федяев, Чугаев
МПК: G05D 13/00
Метки: вала, внутреннего, вращения, двигателя, сгорания, частоты
...реннего сгорания через первый редуктор связанном с выходной шестерней дифференциала, механически связанной с реечным механизмом топливодозирующего органа, усилитель мощности, Выход которого подключен к выходным клеммам задающего электродвигателя, сумматор, выход которого подключен к вхоцу усилителя мощности, а первый вход - к выходу первого датчика частоты вращения, причем выходной вал двигателя внутреннего сгорания через Второй редуктор сВязан с Входным валом топливодозирующего органа, дополнительно Введет датчик положения реечного механлзма топливодозирующего органа, второй и третий входы сумматора подклочены соответственно к выходам второго датчика частоты вращения и датчика положения рабочего механизма топливодозирующего органа,...
Система питания для двигателя внутреннего сгорания
Номер патента: 869568
Опубликовано: 30.09.1981
Автор: Жан-Пьер
МПК: F02M 23/04
Метки: внутреннего, двигателя, питания, сгорания
...тока подачу низкого давленияР через входное отверстие 51, аВьепри отсутствии тока - подачу высокого давления Р через входное отверс- .тие 50. При этом объем Ч управляющей камеры влияет на ее время заполнения и опорожнения и зависит отминимальных проходных сечений патрубка 24 - входного отверстия 51 - 5 ипатрубка 24 - входного отверстия50 - 5, а также скорости звука придавлении Рп . Длительность управляющих сигналов Т и Тд является меньшей длительности опорожнения призаполнении управлякщей камеры 23, арасход дополнительного воздуха должен быть пропорционален расходу топливо-воздушной смеси.При этом лР .Рв зь) 13 вью - отношение удельной теплемкости пдавленииобъеме;коэффициеот размерподводаг- скоростьтеля. ри постоянно и постоянном...
Многоотсчетная система отработки заданиых

Номер патента: 288080
Опубликовано: 01.01.1970
Авторы: Беспаленко, Нещеретов, Экспериментальный
МПК: G05B 11/16
Метки: заданиых, многоотсчетная, отработки
...Уг У. У,. Реле Р - Рз соединены соответственно с точками 3 обоих усилителей У, и Уз всех каналов отсчета.Выход усилителя У (точка 2) соединен через диоды Дщ и Д, с точками 1 усилителей У и Уз а выход усилителя У (точка 2) связан с точкой 1 усилителя Уз, Выход усилителя У,. (точка 2) соединен через диоды Дз и Дз с точками 1 усилителей У и У а выход усилителя У (точка 2) связан с точкой 1 усилителя У, Эти связи накладывают запрет на ложное срабатывание реле одного направления, если сработало реле другого направления от канала более грубого отсчета.Кроме того, в каждой паре усилителей У и У, выходной каскад одного (точка 2) соединен с точкой 1 другого. Эти связи накладыдают запрет на срабатывание реле Р 4, если сработало реле Рз, и...
Система регулирования скорости вращения двигателя

Номер патента: 1032424
Опубликовано: 30.07.1983
Автор: Лоншаков
МПК: G05B 11/01
Метки: вращения, двигателя, скорости
...Неплавное вращение вызвано погрешностями цифро а налоговых преоб ра зова т елей,которые в процессе своей работы периодически проходят все свои состоянияи при наличии погрешностей преобразования формируют циклические погрешности с периодом, равным периодумежду двумя соседними сбросами одногоиэ делителей. При низкой скоростивращения двигателя эти возмущающиевоздействия оказь 1 ваются в полосепропускания системы регулирования ивызывают неплавное вращение двигателя,Цель изобретения - повышение точности системы регулирования .скоростивращения двигателя.Поставленная цель достигаетсятем, что в систему введен цифровойсумматор, первый вход которого соеди.нен с выходом первого делителя частоты, второй вход - с выходом второго делителя частоты,...
Предыдущий патент: Автоматическое устройство рециркуляции отработавших газов двигателя внутреннего сгорания
Следующий патент: Регулятор частоты вращения двигателя с внешним подводом теплоты
Случайный патент: Резонансная виброплощадка горизонтальнонаправленного действия