Интерполятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
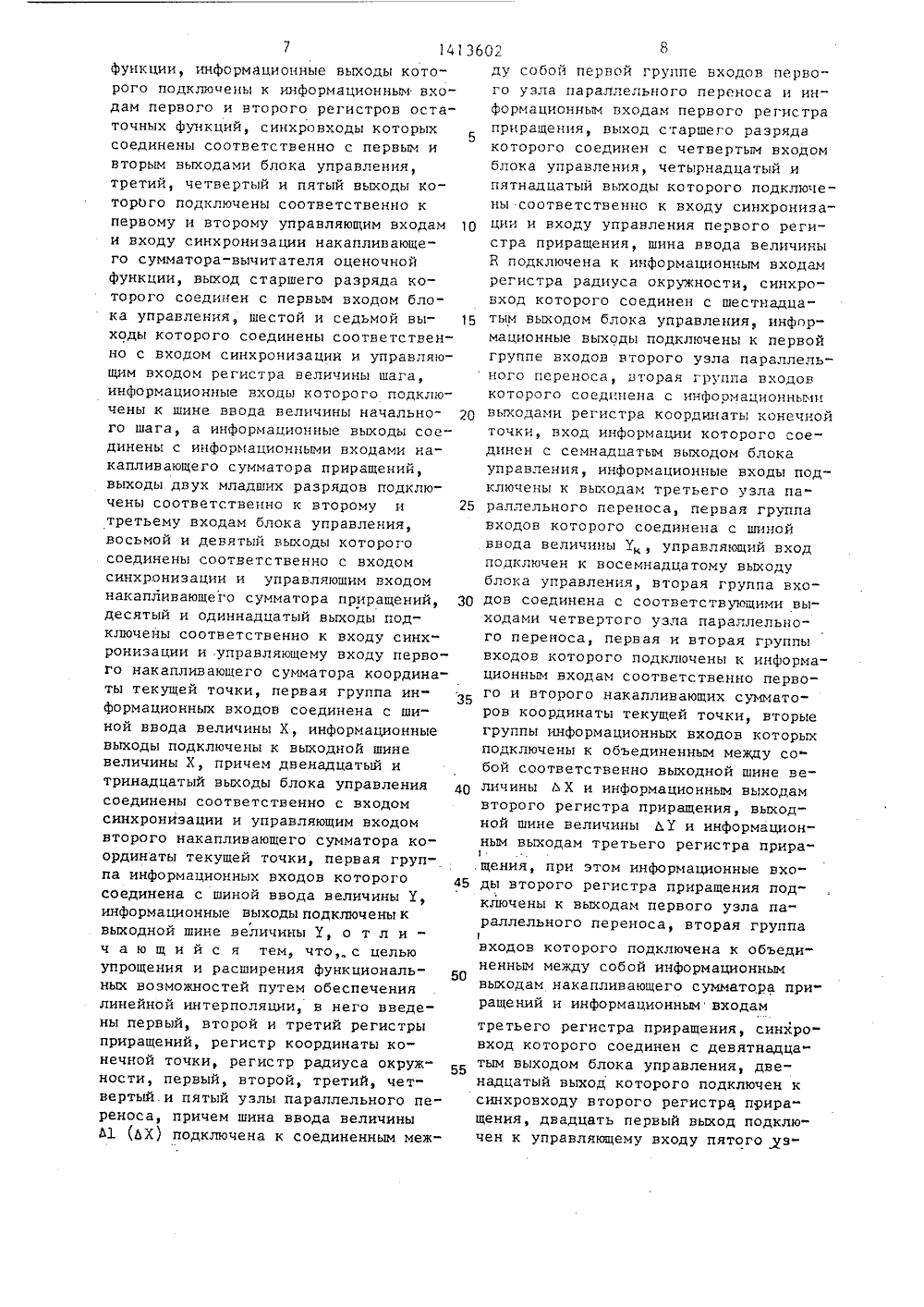
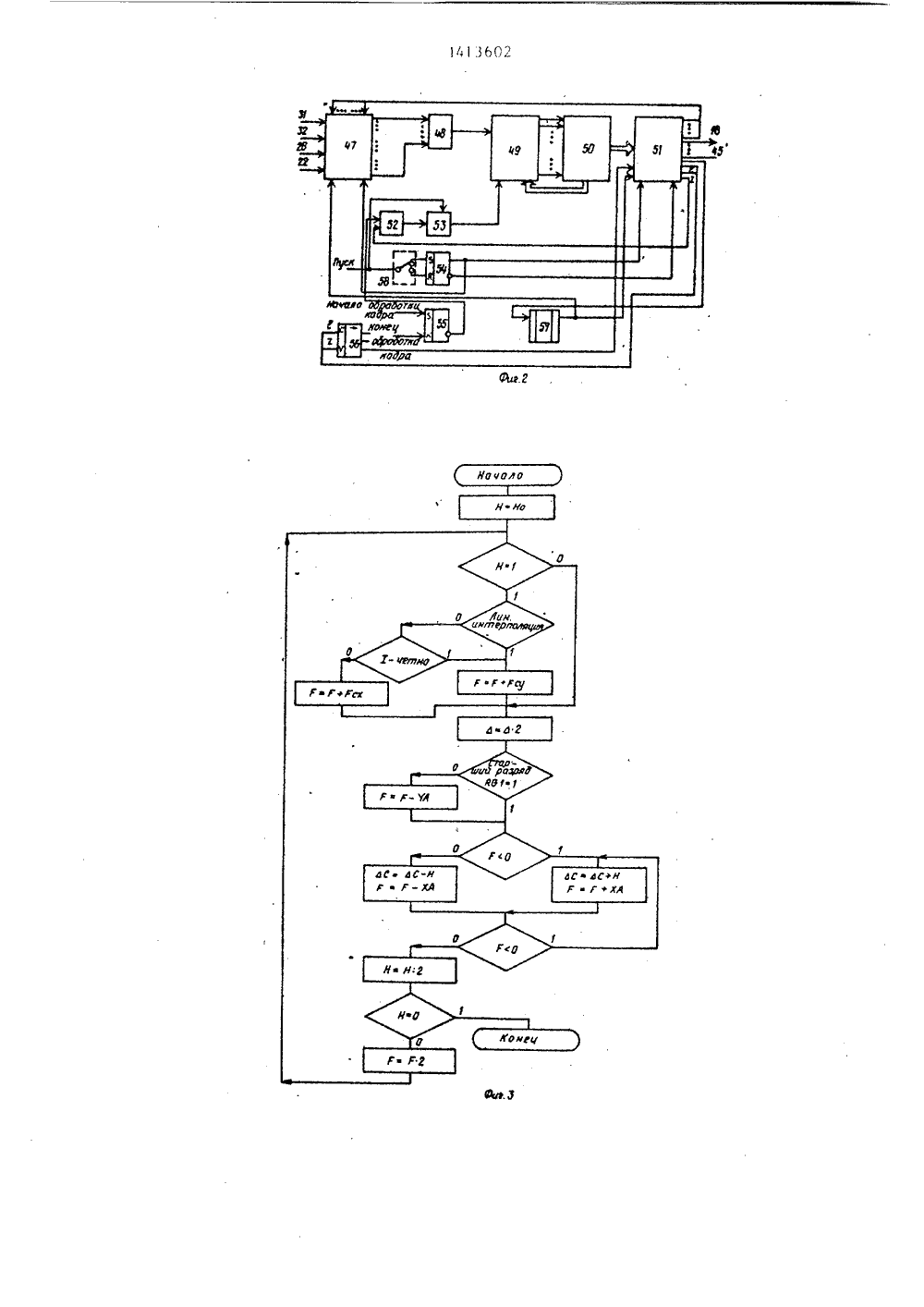
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИРЕСПУБЛИК 0141 05 В 19 1 ГОСУДАРСТВЕННЫЙ НОМИ ПО ДЕЛАМ ИЗОБРЕТЕНИЙ СССР НРЫТИ ОПИСАНИЕ ИЗОБРЕТЕН В ески Ваврищ уктура рполятора сции. - Станкуправлением,е линии на ихс, 96"102.тво СССР9/18, 1982.(57) Изобретение относитике и вычислительной тбыть использовано в сис я к автома" нике и може емах число А ВТОРСНОМУ СВИДЕТЕ(56) Бреслав И.З. и др,точность кругового интебольшим шагом интерполяс числовым программнымучастки и автоматическиоснове. М.: ИДНТП, 1974Авторское свидетельсР 1081623, кл. О 05 В 1 вого программного управления станками и технологическими процессами,Целью изобретения является упрощениеинтерполятора и расширение его функциональных возможностей за счет линейной интерполяции. Поставленнаяцель достигается тем, что в интерполятор, содержащий накапливающий сумматор-вычитатель оценочной функции,два регистра остаточных функций, блок .управления, регистр координаты конечной точки, регистр величины шага, ши"ну ввода величины начального шага,накапливающий сумматор приращений,два накапливающих сумматора координа"ты конечной точки, шины ввода вели-чин Х и У, введены три регистра приращений, регистр координаты конечнойточки, регистр радиуса окружности,пять узлов параллельного переноса исоответствующие связи. 4 ил..)го управления станками и другим технологическим оборудованием.Цель изобретения - упрощение устройства и расширение Функциональныхвозможностей путем обеспечения линейной интерполяции,На Фиг.1 представлена структурнаясхема устройства; на фиг. 2 - блок"схема блока управления; на Фиг. 3и 4 - алгоритмы работы устройства 15и блока управления,Интерполятор содержит регистр 1сдвига/приращения, регистр 2 радиусаокружности, регистр 3 координаты конечной точки, накапливающий сумматор)вычитатель 4 оценочной Функции, регистр 5 сдвига величины шага, накап"ливающий сумматор 6 приращений, регистры 7 и 8 приращений, регистры 9 и10 остаточных функций, накапливающие 25сБчматоры 11 и 12 координат текущейточки, узлы (группы) 13-17 параллельного переноса (мультиплексоры на двавхода), выходы 18-21, вход 22, выходы23-27, вход 28, выходы 29,30, входы 3031-45 блока 46 управления.Блок 46 управления содержит (фиг.2)дешифратор 47, элемент ИЛИ 48, блок49 микропрограммного управления(БМУ)ь постоянный запоминающий блок50, дешифратор 51, элемент И 52, генератор 53 тактовых импульсов, ВБтриггеры 54 и 55, регистр 56 сдвига,счетчик 57 импульсов и переключа"тель 58. 40Переключатель 58 задает режим работы интерполятора (линейная или круговая интерполяция), устанавливая вединичное или нулевое состояние первый ВБ-триггер 54. Второй БЯ-,триггер55 служит для фиксации начала иликонца отработки кадра. В случае наличия сигнала конца отработки кадра(КОК) единичный сигнал с инверсноговыхода триггера 55 при наличии сиг 50нала от дешифратора 51 проходит через элемент И 52 и отключает генератор 53 тактовых импульсов. Регистр56 сдвига предназначен для определения момента окончания вычисленияприращенийпо осям Х и У (при кру 55говой интерполяции). Счетчик 57 служит для задания порядка чередованиявычисления приращений по координатам. В основе работы интерполятора лежит алгоритм линейной интерполяции по методу оценочной функции, Суть алгоритма (фиг.З) состоит в вычислении оценочной Функции Р, по выражениям." Р; = Р;, - УА - еяпР;, ХА, если старший разряд величины (регистрсдвига) равен единице, и Р; = Р, - зцпР;, ХА - в противном случае, где зКпР;, Е-1; +1 знак оценочной функции. Величина приращения Н в каждом цикле уменьша" ется в два раза и служит для вычисления приращения 6 С; = 6 С - зцпРН;ь причем начальное значение Н = 2" (гразрядность регистров приращений).Возможность использования этого алгоритма для вычисления приращений окружности основана на следующих соображениях. Координаты окружности мо" гут быть получены интегрированием по методу прямоугольников с недостатком и избытком и с чередованием вычислением от шага к шагу (последователь" ность вычислений Х,У,У,Х):Х,= Х, - у, Ь,= Х, - ЬХ;у у, + Х.ьу + АуИз уравнений для определения приращенийХ:1 впь 1=Ь 1 ь:уЬу:61 соя- - - Ь 1ХД ьгде 61 = в - - приращение длиныГдугиьУ " контурная скорость;Г - постоянная несущаячастота следящегопривода, можно записать оценочные функции:Р = ВЬХ - У 41 е(2)Р = ВЬУ - ХА 1позволяющие определить требуемые приращения.Таким образом, вычислительный процесс круговой интерполяции состоит из последовательности (1), а приращения на каждом шаге определяют по алгоритму линейной интерполяции (фиг.З). Блок-схема обобщенного алго" ритма линейно-круговой интерполяции приведена на фиг.4.10 15 20 25 30 35 40 45 50 55 Устройство работает следующим образом,В начальный момент времени обнуляются регистры 9 и 1 О остаточныхфункций, сумматоры 11 и 12 координаттекущей точки, сумматор 6 приращенийи сумматор 4 оценочной функции. Затемв зависимости от вида интерполируемой траектории (линейная или круговая интерполяция) осуществляется занесение соответствующей информациив регистры и сумматоры. Так, в случае линейной интерполяции в регистры2 и 3 заносятся величины Х и У(координаты конечной точки прямой),а в регистр 1 сдвига - величина тактового приращения ЬХ, которая, проходя через первую группу 13 параллельного переноса, заносится в регистр 7 приращения, После этого происходит переход к выполнению микропрограммы линейной интерполяции. Врежиме круговой интерполяции в сумматоры 11 и 12 координат текущей точки заносятся значения координат начальной точки окружности Хд и Уя,в регистр 1 сдвига - величина аппроксимирующей хорды Ь 1, а в регистр 2 - радиус окружности В, Крометого, устанавливается в единичноесостояние регистр 56 сдвига в блоке46 управления, через четвертую группу 17 параллельного переноса передается либо код величины У с сумматора 12, либо код величины Х с сумматора 11. Код соответствующей величины, проходя через третью группу 14параллельного переноса, заноситсяв регистр 3, после чего происходитпереход к выполнению микропрограммылинейной интерполяции.Рассмотрим работу интерполяторапри реализации микропрограммы линейной интерполяции. В регистр 5 сдвига заносится величина начального шага Н и анализируется ряд логичес"ких условий. Если Н=1 (сигнал на шине 32), установлен режим круговойинтерполяции (триггер 54 в нулевомсостоянии) и 1 нечетно (младший раз"ряд счетчика 57 равен нулю), то к содержимому сумматора 4 оценочной функции добавляется код остаточной функ"ции иэ регистра 9, который проходитчерез пятую группу 16 параллельногопереноса, если 1 че.тно (младший разряд счетчика 57 равен единице), вы"полняется операция суммирования содержимого сумматора 4 оценочной функции и регистра 10. При равенстве Н=1 и в случае линейной интерполяции (триггер 54 в единичном состоянии) к содержимому сумматора 4 оценочной функции добавляется код регистра 10. После выполнения указанных операций, либо в случае Н 1 происходит сдвиг содержимого регистра 1 сдвига на разряд влево с целью анализа очередной цифры в двоичном представлении величины ЬХ или Ь 1.Если старший разряд регистра 1 сдвига равен единице (наличие сигна" ла на шине 22), из содержимого сум" матора 4 оценочной функции вычитает" ся код регистра 3, который проходит через вторую группу 15 параллельного переноса. После выполнения этой операции или при равенстве старшего разряда регистра 1 сдвига нулю анализируется знак сумматора 4 оценочной функции. Если Р0 (отсутствие сигнала на шине 28), выполняются операции вычитания из содержимого сумматора 4 оценочной функции кода регистра 2, проходящего через вторую группу 15 параллельного переноса, и из сумматора6 приращений - кода регистра 5 сдвига величины шага. В противном случае (Р0) к сумматорам 4 оценочной функции и 6 приращения подсуммируютсяукаэанные величины. Затем еще разосуществляется проверка знака оценоч"ной функции, и при Р С 0 повторно про"изводятся операции суммирования всумматорах 4 и 6.Как только величина оценочной функции станет положительной, происходит переход к новой, итерации, для чего уменьшается шаг в два раза (сдвиг содержимого регистра 5 сдви" га на разряд вправо) и при НФО (отсутствие сигнала на шине 31) Р увеличивается в два раза (сдвиг содержимого сумматора 4 оценочной функции на разряд влево), после чего происходит переход в микропрограмме (фиг.3) на анализ равенства Н=1 и повторение перечисленных вьппе операций, Если же после очередного умень" шения величины шага он окажется рав" ным нулю, то выполнение микропрограммы определения приращения прямой заканчивается.5 14136В режиме линейной интерполяции на регистр 10 остаточной функции передается код сумматора 4 оценочной функ-.ции, на регистр 8 - код сумматора 6 приращений и происходит подсуммирование кодов регистров 7 и 8 соответственно к сумматорам 11 и 12 координат текущей точки. Таким образом, на выходных шинах формируются очеред ные рассчитанные величины ЬХ и Ь 7, Хи У.В режиме круговой интерполяции после выполнения микропрограммы расчета приращения осуществляются сле дующие операции. Цсличетно (младший разряд счетчика 57 равен единице), на регистр 10 остаточной функции передается код сумматора 4 оценочной функции, на регистр 7 - код 20 сумматора 6 приращений, который про" ходит через первую группу 13 параллельного переноса, Затем происходит вычитание кода регистра 7 из суммато. ра 11 координаты Х текущей точки, 25 осуществляется сдвиг слево на разряд единицы в регистре 56 сдвигаблока 46 управления. В противном случае (1 нечетко) на регистр 9 ос" таточной функции передается код сум" ЗО матора 4 оценочной Функции, на регистр 8 - код сумматора 6 приращений, после чего происходит подсуммирование кода регистра 8 к содержимому сум-. матора 12 координаты У текущей точ- З 5 ки и осуществляется сдвиг в регистре 56 сдвига.После сдвига информации в регистре 56 сдвига анализируется состояние его третьего выхода, и, если этот 4 О сигнал соответствует нулевому уровню (К Ф 4), в счетчик 57 добавляется единица и происходит переход в микропрограмме (фиг.4) для вычисления .приращения окружности по второй оси 45 координат. Если же на третьем выходе регистра 56 сдвига установлена еди" ница (К=4), вычисления очередных приращений окружности заканчиваются.После того, как в регистрах 7 и 8 50 будутсформированы новые значения приращений д Х иУ, а в сумматорах 11 и 12 - значения текущей координаты, указанные величины передаются на исполнительные механизмы. Затем в 55 зависимости от состояния триггера 55 в блоке 46 управления работа интерполятора либо заканчивается (если имеется сигнал "Конец отработки кад 02 6ра"), либо осуществляется переходк микропрограмме (Фиг.4) для расчета очередных приращений траектории(при отсутствии сигнала "Конец отработки кадра"),Устройство 46 управления работаетследующим образом.В начальный момент времени (посигналу Пуск") запускается генератор 53 и сигналом с его выхода заносится код адреса по которому определяется первая микрокоманда микро"программы управления работы интерпо"лятора, которая записана в блоке 50постоянного запоминающего устройства (ПЗУ), По сигналу "Пуск" с помощью переключателя 58 фиксируетсявид интерполяции и устанавливаетсяв соответствующее состояние триггер54. Кроме того, в начальный моментвремени сигналом "Начало отработкикадра" усганавливается в единичноесостояние триггер 55. После этогопроисходит считывание микрокомандиз ПЗУ 50 и передача их на второйдешифратор 51,который под действиеммикрокоманды вырабатывает определен"ную последовательность сигналов; управляющих по шинам 18-45 работойинтерполятора, причем для формирования следующего адреса микрокомандыиспользуется семиразрядная шина, соединяющая выходы ПЗУ 50 с соответст"вующими входами управления регистром адреса микрокоманд в БМУ 49.Для выработки сигналов условныхпереходов используется первый дешифратор 47 и элемент ИЛИ 48, Прохождение сигналов условных переходов через элемент ИЛИ 48 к входу БМУ 49осуществляется под управлением сигналов обратной связи от второго дешифратора 51. Переход от одной микрокоманды к другой в микропрограммах осуществляется через равные промежуткивремени, определяемые периодом следования тактовых импульсов от генератора 53 тактовых импульсов.Сигналом окончания работы устрой"ства является сигнал, поступающийот элемента И 52, который, в своюочередь, формируется при наличииодновременно двух сигналов: от второго дешифратора 51 и с инверсноговыхода второго триггера 55,Формула изобретенияИнтерполятор, содержащий накапливающий сумматор-вычнтатель оценочной1413602 35 40 45 50 функции, информационные выходы которого подключены к информационным входам первого и второго регистров остаточных функций, синхровходы которыхсоединены соответственно с первым ивторым выходами блока управления,третий, четвертый и пятый выходы которого подключены соответственно кпервому и второму управляющим входами входу синхронизации накапливающего сумматора-вычитателя оценочнойфункции, выход старшего разряда которого соединен с первым входом блока управления, шестой и седьмой выходы которого соединены соответственно с входом синхронизации и управляющим входом регистра величины шага,информационные входы которого подключены к шине ввода величины начального шага, а информационные выходы соединены с информационными входами накапливающего сумматора приращений,выходы двух младших разрядов подключены соответственно к второму итретьему входам блока управления,восьмой и девятый выходы которогосоединены соответственно с входомсинхронизации и управляющим входомнакапливающего сумматора приращений,десятый и одиннадцатый выходы подключены соответственно к входу синхронизации и управляющему входу первого накапливающего сумматора координаты текущей точки, первая группа информационных входов соединена с шиной ввода величины Х, информационныевыходы подключены к выходной шиневеличины Х, причем двенадцатый итринадцатый выходы блока управления соединены соответственно с входомсинхронизации и управляющим входомвторого накапливающего сумматора координаты текущей точки, первая группа информационных входов которогосоединена с шиной ввода величины У,информационные выходы подключены квыходной шине величины Х, о т л и -ч а ю щ и й с я тем, что, с цельюупрощения и расширения функциональных возможностей путем обеспечениялинейной интерполяции, в него введены первый, второй и третий регистрыприращений, регистр координаты конечной точки, регистр радиуса окружности, первый, второй, третий, четвертый.и пятый узлы параллельного пе"реноса, причем шина ввода величиныЬ 1 (ЬХ) подключена к соединенным меж 10 15 20 25 30 ду собой первой группе входов первого узла параЛлельного переноса и информационным входам первого регистраприращения, выход старшего разрядакоторого соединен с четвертым входомблока управления, четырнадцатый ипятнадцатый выходы которого подключены соответственно к входу синхронизации и входу управления первого регистра приращения, шина ввода величиныВ подключена к информационным входамрегистра радиуса окружности, синхровход которого соединен с шестнадцатым выходом блока управления, информационные выходы подключены к первойгруппе входов второго узла параллельного переноса, вторая группа входовкоторого соединена с информационнышвыходами регистра координаты конечнойточки, вход информации которого соединен с семнадцатым выходом блокауправления, информационные входы подключены к выходам третьего узла па"раллельного переноса, первая группавходов которого соединена с шинойввода величины У , управляющий входподключен к восемнадцатому выходублока управления, вторая группа входов соединена с соответствующими выходами четвертого узла параллельного переноса, первая и вторая группывходов которого подключены к информационным входам соответственно первого и второго накапливающих сумматоров координаты текущей точки, вторые группы информационных входов которых подключены к объединенным между со бой соответственно выходной шине величины Ь Х и информационным выходам второго регистра приращения, выходной шине величины ДУ и информационным выходам третьего регистра приращения, при этом информационные входы второго регистра приращения подключены к выходам первого узла параллельного переноса, вторая группа1входов которого подключена к объединенным между собой информационнымвыходам накапливающего сумматора при"ращений и информационным входам третьего регистра приращения, синхровход которого соединен с девятнадцатым выходом блока управления, двенадцатый выход которого подключен к синхровходу второго регистра памира" щения, двадцать первый выход подключен к управляющему входу пятого уз 143602ла параллельного переноса, перваяи вторая группы входов которого соединены с информационными выходамисоответственно первого и второго регистров остаточных функций, выходыподключены к первой группе информа,ционных входов накапливающего сумматора"вычитателя оценочной функции,вторая группа информационных входов которого соединена с выходами второго уэла параллельного переноса, управляющий вход которого соединен с 5двадцать вторым выходом блока управления, двадцать третий и двадцатьчетвертый выходы которого подключенык управляющим входам соответственнопервого и четвертого уэлов параллельного переноса.1433602 оставитель И,Швец ехред Л,Сердюкова ыбченко тяга едакт оррек каэ 3784/5 Тираж 866 ВНИИПИ Государственного по делам изобретений 035, Москва, Ж, Раушсисное митета ССоткрытий 3 я наб.,Производственно-полиграфическое предприяти жгород, ул. Проектная
СмотретьЗаявка
4182135, 16.01.1987
ПЕНЗЕНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ВАШКЕВИЧ СЕРГЕЙ НИКОЛАЕВИЧ, ВАВРИЩУК АЛЕКСАНДР ЮЛЬЕВИЧ, ПОПОВ ВЛАДИМИР НИКОЛАЕВИЧ, ТОКАРЕВ АЛЕКСЕЙ ЛЕОНИДОВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/4103
Метки: интерполятор
Опубликовано: 30.07.1988
Код ссылки
<a href="https://patents.su/8-1413602-interpolyator.html" target="_blank" rel="follow" title="База патентов СССР">Интерполятор</a>
Устройство для распознавания прямолинейных элементов изображений

Номер патента: 873252
Опубликовано: 15.10.1981
Автор: Сергеев
МПК: G06K 9/00
Метки: изображений, прямолинейных, распознавания, элементов
...также открывают элемент И 7. Если в этот момент времени присутствует сигнал на выходе первого порогового элемента 4,т.е. имеется контур" ный элемент, то этот сигнал через открытый элемент И 7 поступает на вход первого сумматора 8. Таким образом, последовательно просматривается направление вдоль оси Х. Если в данном направлении находится прямая линия или край объекта, то в первом сумматоре 8 будет сигнал, достаточ ный для срабатывания второго порогового элемента 9. Если прямой линии или края нет, накопленный сигнал в первом сумматоре 8 сбрасывается, и устройство переходит к суммированию в следующем направлении относительно начальных зафиксированных координат Х и У в регистрах 15 и 17 Х и У. При считывании из блока памяти 14, например...
Интегро-дифференциальный вычислитель
Номер патента: 960813
Опубликовано: 23.09.1982
Автор: Баранов
МПК: G06F 7/64
Метки: вычислитель, интегро-дифференциальный
...шаг последователь. ного преобразования входной величины Х в выходную У, который выбирается из условия заданной точности, 960813 12Триггер 43 со счетным входом выполняет деление на две частоты выходной последовательности импульсовэлемента 42 задержки. Поэтому натретьем выходе блока 11 синхронизации действует последовательность импульсов частоты й/2 п, которая, всвою очередь, делится делителем 44в и раз. Таким образом, на выходеделителя 44 (четвертый выход блока11 синхронизации) действует последовательность импульсов частотый/2 п , период следования которойопределяет время вычисления наодном шаге,Вычисления начинаются после установки триггера 16 в единичноесостояние импульсом четвертого выхода блока 11 синхронизации. Сигналпрямого выхода...
Цифровой измеритель температуры

Номер патента: 1075086
Опубликовано: 23.02.1984
МПК: G01K 7/01
Метки: измеритель, температуры, цифровой
...ЗОсравнения, вторым входом блока управления и через первые элемент задержки и формирователь подключен к управляющему входу второго регистра, а выход элемента И через вторые элемент задержки и формирователь подключен к управляющему.входу первого регистра, информационные вхо.ды которого подключены к выходу блока памяти, при этом первый выход аремяимпульсного преобразователя подключен к входу дополнительного счетчика, выход когорого соединен с информационными входами блока памяти, а выходы блока управления соединены с управляющими входами дополнительного счетчика времяимпульсного преобразователя, блока па мяти и управляемого генератора.Ня фнг, 1 приведена функциональнаясхема ци; рового измерителя температуры, на фиг, 2рисунок,...
Цифровой автоматический регулятор амплитуд сейсмических сигналов

Номер патента: 610035
Опубликовано: 05.06.1978
Авторы: Казанин, Ремизов, Слуцковский, Спирин
МПК: G01V 1/32
Метки: автоматический, амплитуд, регулятор, сейсмических, сигналов, цифровой
...с формулой (4) производит выбор М или ь/7ЗВЯ рцэрПолучеттная разность переписывается в рег истр 9Операция умножения, необходимая для вычисления Юр выполняется путем сдви гаразностиЩ/о-У)в регистре 9 в сторону младших разрядов на величину Р, 3 соответствующую выбранной величине ьф или ьС/ли рс,р., СдВиГ кодОВ В реГистре 9 синееЗи хронизируется импульсами узла управления 5. Цифровой автоматический регулятор амплитуд сейсмических сигналов, содержащий соединенные параллельно цели, состоящие из источника входной информации, узла управления, выходного регистра, а также первого сдвигового и арифметического регистров; сумматора, включенных последовательно, вто рого, третьего сдвиговых регистров и регистра кода порядка, включенных также...
Устройство для контроля кинематической погрешности зубчатых передач

Номер патента: 1024699
Опубликовано: 23.06.1983
Авторы: Василенко, Вербицкий, Микулович
МПК: G01B 7/287
Метки: зубчатых, кинематической, передач, погрешности
...с выходомуправВляемого вентиля 7 импульсного преобразователя 2 угла поворота конечного:звена, регистр памяти 9, одиниэ входов которого соединен с выходом 50управляемого вентиля 6 импульсногоИпреобразователя 1 угла поворота начального звена, кодирующий переключатель 10, первый сумматор 11, выходкоторого соединен с входом регистра 9 памяти, второй сумматор 12,входы которого соединены с выходами счетчика 8 и регистра 9 памяти,и блок 13 управления, связанный суправляемыми вентилями 6 и 7, счетечикоми регистром 9 памяти связан с одним из входов первогосумматора 11 через блок корректировки кода, а входы блока 15 корректиК = -ровки кода соединены с выходами вто"рого кодирукщего переключателя 14; управляемого вентиля 6...
Предыдущий патент: Устройство для управления стендом прикатки зубчатых передач
Следующий патент: Линейный интерполятор
Случайный патент: Тепловая труба