Манипулятор модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 763082
Авторы: Анциферова, Баранов, Бершадская, Калабин, Калошин, Конов, Подустов, Степанов, Сурнин

Текст
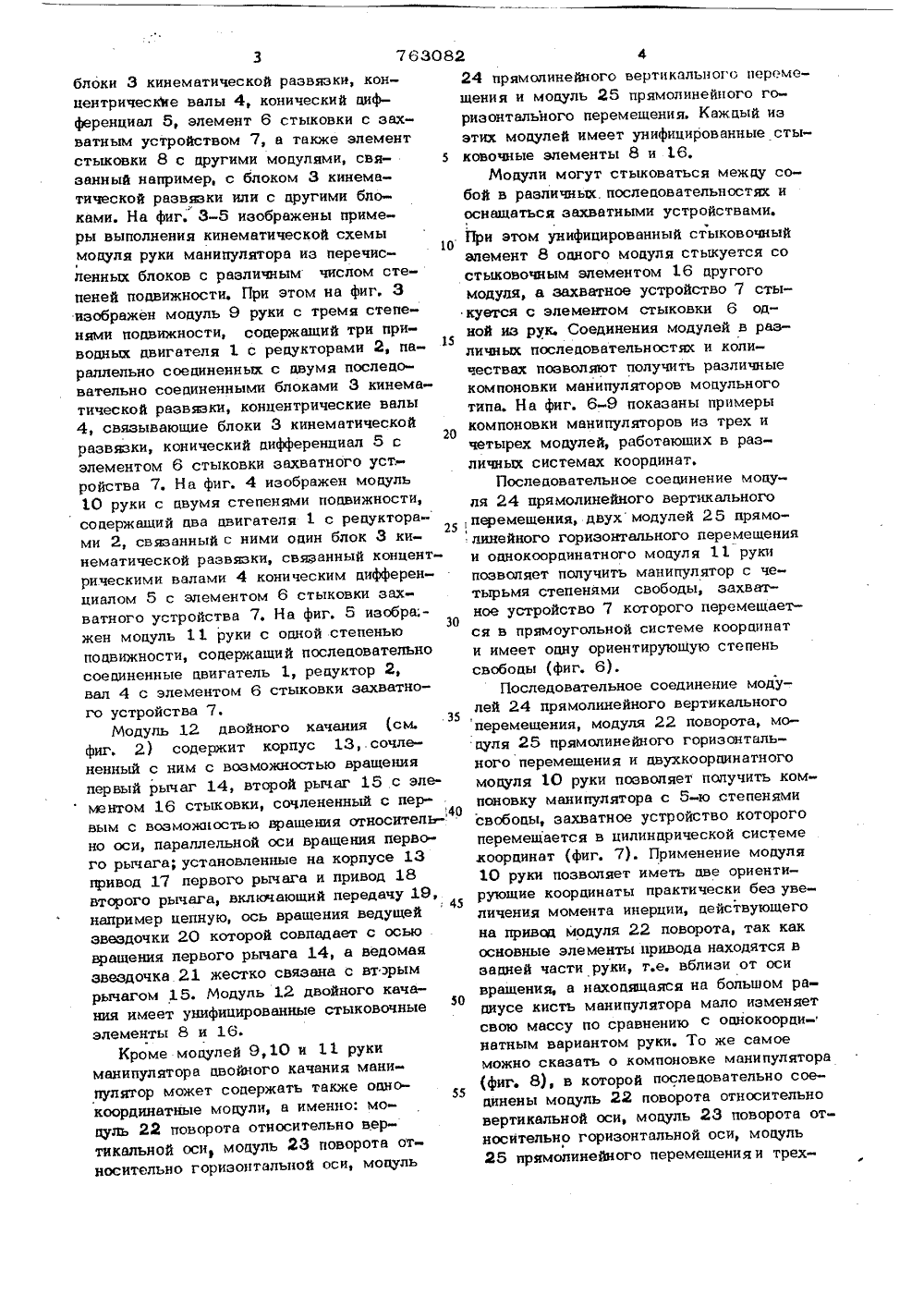
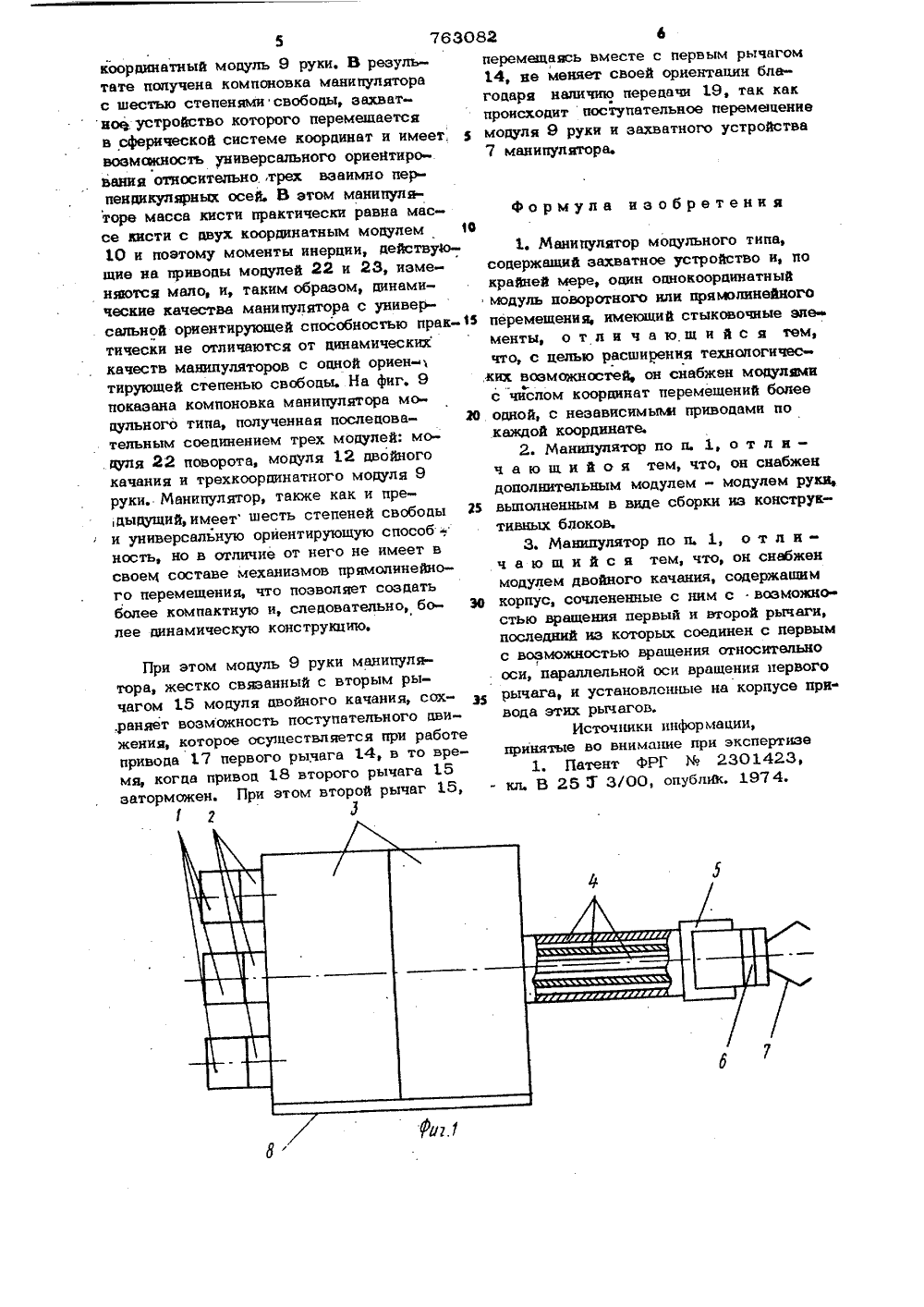
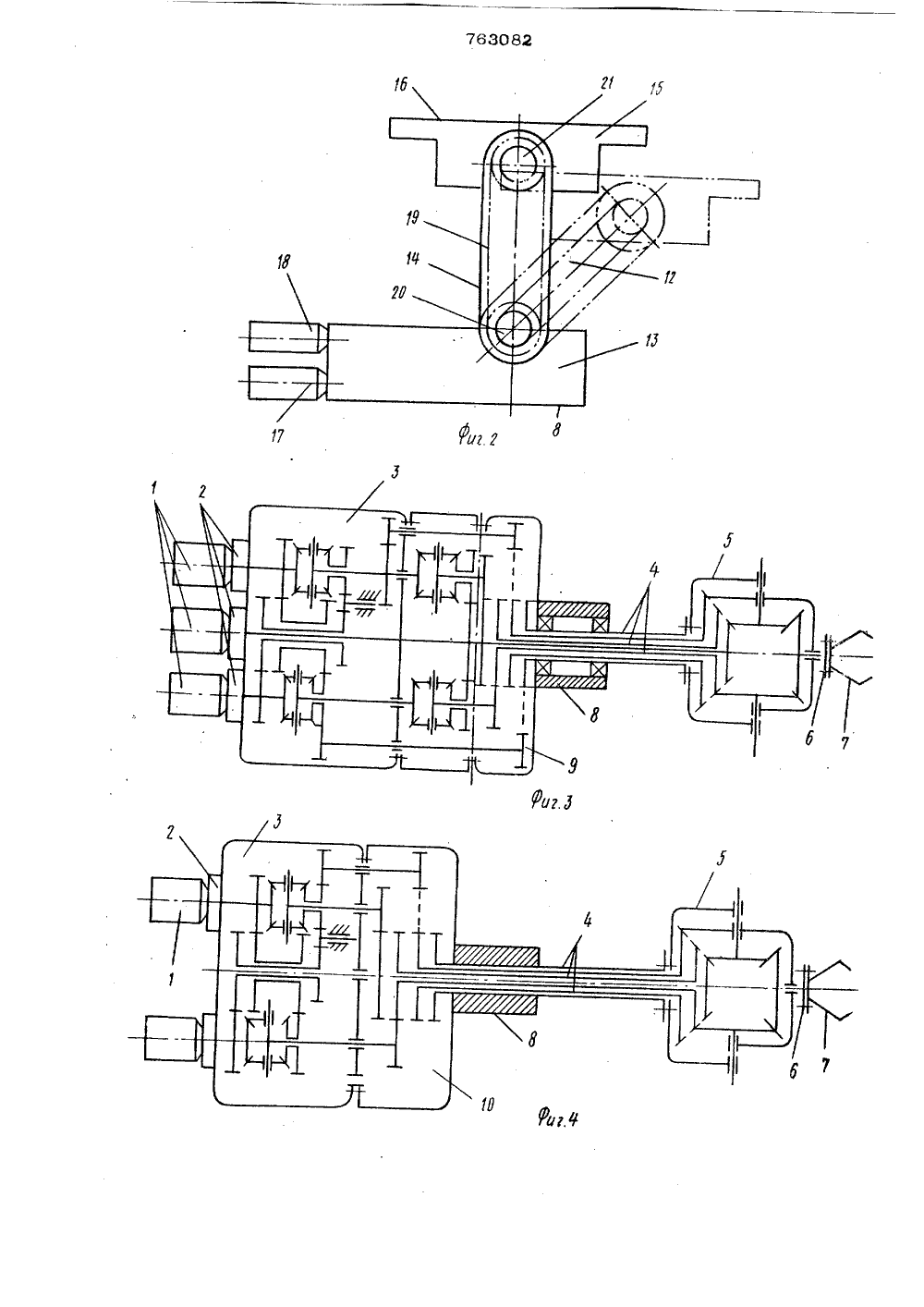
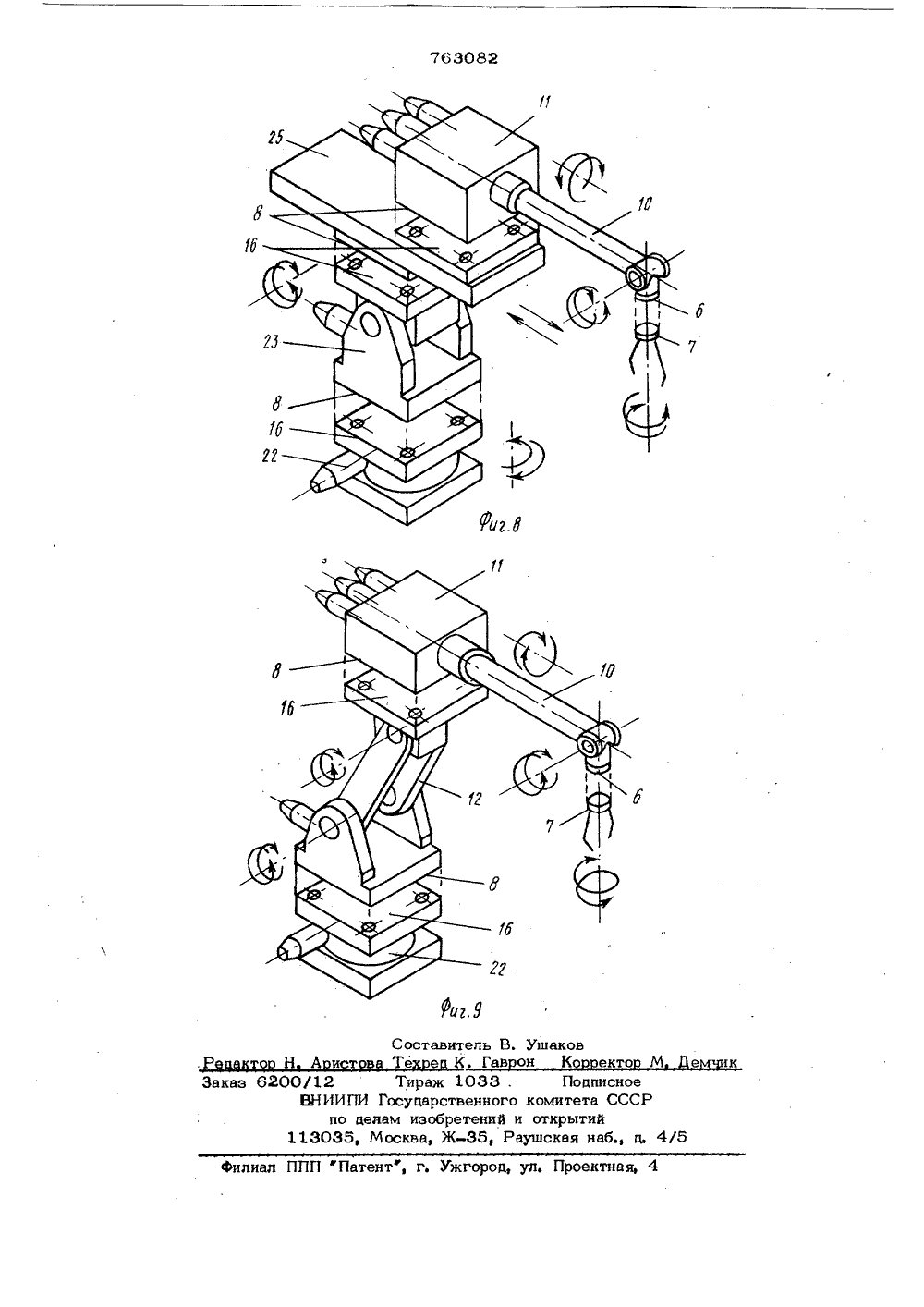
(54) МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА Изобретение относится к манипуляторам и может быть использовано в различных областях техники.Известны манипуляторы модульного типа Я, содержащие захватное устройство и, по крайней мере один оцнокоординат 5 ный модуль поворотного или прямолинейного перемещения, имеющий стыковочные элементы, позволяющие соединять модули цруг с другом последовательно10 в любом порядке и количестве.Недостатком известных устройств является то, что каждый модуль обеспечивает перемещение звеньев манипулятора по одной координате, а последовательное соединение однокоординатных модулей увеличивает вес конструкции и снижает технологические возможности манипулятора в цепом.С целью расширения технологических воэможностей манипулятор снабжен модулями с числом координат пеоемещений более одной, с независимыми приводами по каждой координате. Кроме того, он может бьггь снабжен дополнительным модулем - модулем руки, выполненным в вице сборки иэ конст руктивных блоков, в также снабжен модулем двойного качания, содержащим кор пус, сочлененные с ним с воэможностью вращения первый и второй рычаги, последних из которых соединен с первым с возможностью вращения относительно оси параллельной оси вращения первого рычага, и установленные на корпусе привода этих рычагов.На фиг. 1 показан модуль рукитна фиг. 2 - модуль двойного качвнищна фиг. 3 - пример выполнения кинематической схемы подвижности;на фиг. 4- то же, с двумя степенями подвижности на фиг. 5 - то же, с одной степенью под вижностщна фиг. 6-9 - варианты компоновок манипулятора модульного типа.Манипулятор модульного типа содеркиз ряд модулей.Модуль руки (см, фиг. 1) содержит териводные двигатели 1 с рецукторами 3,7630 блоки 3 кинематической развязки, концентрическ 1 ге валы 4, конический дифференциал 5, элемент 6 стыковки с захватным устройством 7, а также элемент стыковки 8 с другими модулями, свя 5 занный например, с блоком 3 кинематической развязки или с другими блоками. На фиг. 3-5 изображены приме ры выполнения кинематической схемы1модуля руки манипулятора из перечисленных блоков с различным числом степеней подвижности. При этом на фиг. 3 изображен модуль 9 руки с тремя степенями подвижности, содержащий три приводных двигателя 1 с редукторами 2, па раллельно соединенных с двумя последовательно соединенными блоками 3 кинематической развязки, концентрические валы 4, связывающие блоки 3 кинематической развязки, конический дифференциал 5 с элементом 6 стыковки захватного уст. - ройства 7. На фиг. 4 изображен модуль 10 руки с двумя степенями подвижности, содержащий два двигателя 1 с редукторами 2, связанный с ними один блок 3 кинематической развязки, связанный концентрическими валами 4 коническим дифференциалом 5 с элементом 6 стыковки захватного устройства 7. На фиг, 5 изобра;- жен модуль 11 руки с одной степенью подвижности, содержащий послеаовательно соединенные двигатель 1, редуктор 2, вал 4 с элементом 6 стыковки захватного устройства 7.Модуль 12 двойного качания (см. фиг. 2) содержит корпус 13, сочлененный с ним с возможностью вращения первый рычаг 14, второй рычаг 15 с элементом 16 стыковки, сочлененный с первым с возможностью вращения относительно оси, параллельной оси вращения первого рычага; установленные на корпусе 13 привод 17 первого рычага и привод 18 второго рычага, включающий передачу 19, например цепную, ось вращения ведущей звездочки 20 которой совпадает с осью вращения первого рычага 14, а ведомая звездочка 21 жестко связана с вторым рычагом 15. Модуль 12 двойного качания имеет унифицированные стыковочные элементы 8 и 16.Кроме модулей 9,10 и 11 руки манипулятора двойного качания манипулятор может содержать также одно- координатные модули, а именно: модуль 22 поворота относительно вертикальной оси модуль 23 поворота относительно горизонтальной оси, модуль 82 424 прямолинейного вертикального перемещения и модуль 25 прямолинейпого горизонтального перемещения. Каждый изэтих модулей имеет унифицированные стыковочные элементы 8 и 16,Модули могут стыковаться между собой в различных, послеаовательностях иоснащаться захватными устройствами.. При этом унифицированный стыковочныйоэлемент 8 одного модуля стыкуется состыковочным элементом 16 другогомодуля, а захватное устройство 7 стыкуется с элеменгом стыковки 6 одной из рук. Соединения модулей в раз 5личных последовательностях и количествах позволяют получить различныекомпоновки манипуляторов модульноготипа. На фиг. 6-9 показаны примерыкомпоновки манипуляторов из трех и20четырех модулей, работающих в различных системах координат.Последовательное соединение мопуля 24 прямолинейного вертикального25 ,, перемещения, двух модулей 25 прямолинейного горизонтального перемещенияи однокоораинатного модуля 11 рукипозволяет получить манипулятор с четырьмя степенями свободы, захватное устройство 7 которого перемешаетзося в прямоугольной системе координати имеет одну ориентирующую степеньсвободы (фиг. 6),Последовательное соединение модулей 24 прямолинейного вертикального35перемещения, модуля 22 поворота, модуля 25 прямолинейного горизонтального перемещения и двухкоординатногомодуля 10 руки позволяет получить компоновку манипулятора с 5-ю степенямисвободы, захватное устройство которогоперемешается в цилиндрической системе,координат (фиг. 7). Применение модуля10 руки позволяет иметь аве ориентирующие координаты практически без уве 45личения момента инерции, действующегона привод модуля 22 поворота, так какосновные элементы привода находятся взадней части руки, т.е. вблизи от осивращения, а находящаяся на большом радиусе кисть манипулятора мало изменяетсвою массу по сравнению с однокоординатным вариантом руки. То же самоеможно сказать о компоновке манипулятора(фиг. 8), в которой последовательно сое 55аинены модуль 22 поворота относительновертикальной оси, модуль 23 поворота относительно горизонтальной оси, модульФ25 прямолинейного перемешенияи трех763082 5координатный модуль 9 руки. В результате получена компоновка манипулятора с шестью степенями свободы, захват ное устройство которого перемещаетса в сферической системе координат и имеет, 5 возмакность универсального ориентирования относительно.,трех взаимно перпендикулярных осей. В этом манипулаторе масса кисти практически равна массе кисти с двух координатным модулем 10 10 и поэтому моменты инерции, действующие на приводы модулей 22 и 23, изменяются мало, и, таким образом, динамические качества манипулятора с универсальной ориентирующей способностью правтически не отличаются от динамических качеств манипуляторов с одной ориен-тирующей степенью свободы. Иа фиг, 9 показана компоновка манипулятора мьдульного типа, полученная последовв тельным соединением трех модулей: модуля 22 поворота, модуля 12 двойного качания и трехкоординатного модуля 9 руки. Манипулятор, также как и предыдущий, имеет шесть степеней свободы 25 и универсальную ориентирующую способ, ность, но в отличие от него не имеет в своем составе механизмов прямолинейного перемещения, что позволяет создать более компактную и, следовательно, бо лее динамическую конструкцию. При этом модуль 9 руки манипулятора, жестко связанный с вторым рычагом 15 модуля двойного качания, сох.раняет воэможность поступательного движения, которое осуществляется при работе привода 17 первого рычага 14, в то время, когда привод 18 второго рычага 15 заторможен. При этом второй рычаг 15,перемещаясь вместе с первым рычагом14, не меняет своей ориентации благодаря наличию передачи 19, так какпроисходит поступательное перемещениемодуля 9 руки и захватного устройства7 манипулятора. формула изобретения 1. Манипулятор модульного типа,содержащий захватное устройство и, покрайней мере, один опнокоординатныймодуль поворотного или прямолинейногоперемещения, имеющий стыковочные элементы, о т л и ч а ю,щ и й с а тем,что, с целью расширения технологических возможностей, он снабжен модулямис чйслом координат перемещений болееодной, с неэависимьпе приводами покаждой координате.2. Манипулятор по и. 1, о т л и -ч а ю щ и й о я тем, что, он снабжендополнительным модулем - модулем руки,выполненным в виде сборки иэ конструктивных блоков.3. Манипулятор по п. 1, о т л ич аю щи йс я тем, что, онснабженмодулем двойного качания, содержащимкорпус, сочлененные с ним с возможностью вращения первый и второй рычаги,последний иэ которых соединен с первымс воэможностью вращения относительнооси, параллельной оси вращения первогорычага, и установленные на корпусе привода этих рычагов.Источники инфор мации,принятые во внимание при экспертизе1. Патент фРГ % 2301423,кл. В 25 Х 3/00, опублик. 1974,763082 оставитель В. Ушакове е . Гав он Ко екто/5 лиал ППП "Патент", г. Ужгород, ул. Проектная, 4 аз 6200/12 Тираж 1033 ВН ИИПИ Государственно по делам иэобретени 113035, Москва, Ж, Подписное о комитета ССС и открытий Раущская набд.
СмотретьЗаявка
2502112, 01.07.1977
ПРЕДПРИЯТИЕ ПЯ Р-6930
СУРНИН БОРИС НИКОЛАЕВИЧ, СТЕПАНОВ ВЛАДИМИР ПАВЛОВИЧ, КАЛАБИН ИГОРЬ ВИТАЛЬЕВИЧ, БАРАНОВ АНАТОЛИЙ ГЕОРГИЕВИЧ, АНЦИФЕРОВА АНТОНИНА АНДРЕЕВНА, КОНОВ АРНОЛЬД МИХАЙЛОВИЧ, ПОДУСТОВ ВЛАДИМИР ЯКОВЛЕВИЧ, КАЛОШИН БОРИС НИКОЛАЕВИЧ, БЕРШАДСКАЯ ТАМАРА ГРИГОРЬЕВНА
МПК / Метки
МПК: B25J 11/00
Метки: манипулятор, модульного, типа
Опубликовано: 15.09.1980
Код ссылки
<a href="https://patents.su/6-763082-manipulyator-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор модульного типа</a>
Модуль руки манипулятора

Номер патента: 1397278
Опубликовано: 23.05.1988
Метки: манипулятора, модуль, руки
..., 1 с помощ:и нягц 1 р я, с Вя эан ии - ;,П 1пнеВ.оц и Бс сдя, шток б кс то ро;сПомощью еяряра 7 связан с25 Гр-Г.:с Основанием 1 В кячс стве пригс,гцс ГО устройства 5 э но исНоьзс - В ят, лкбой из и -:Вес .Нь х при водое:с с РЯИ Ч е. Сс. 31 К Т р О МЕ Х Я НИ Ч Е с КИИг.:Яраяц;ческийкомбинированный, 1 сроме го О,Одулт, со;ержит измеритель - -С1 п цус с 1 с е у 8, .1;оц 1 олируюую Взяим я р яспО Окепи Ос,Ясзвс 1 н 1 й 1 дру Г От Нс СИ ЕЛЬС др ЧГ 11 ЯК; Т 2 Пр ужИН( 1 иг,и 2 ) прес"Явля ет собой набор гпоских п 1 ямых цр 5 м 1 9 и 1 Ябор более 35 Е 1 ННсХ П ОСКЕХ СГЕДЕ Я Рс 1 ЕЛЬНО П 10 солсцо изс гнутьп; п 1 гже н 10, ряспсло 1:.ецх. о обе с"арсцы от набора плос- КИХ ПЕ 3-ЖИЕ."4 спуль руки манипулятора рабоЯет 40 , ЛЕ СГС ВЕСИМ с Р...
Звено-модуль руки манипулятора

Номер патента: 1194668
Опубликовано: 30.11.1985
Авторы: Копп, Погорелов, Харин
МПК: B25J 1/02
Метки: звено-модуль, манипулятора, руки
...установки датчика,Рука манипулятора состоит иззвеньев-модулей (фиг. 1, 2) 1, 2 и 3и захватного органа 4. Звенья-модуля состыкованы присоединительнымиэлементами 5 и 6 и установлены наблоке 7, представляющем собой неподвижное основание либо один илинесколько приводных механизмов. Звено-модуль руки содержит подвижныеэлементы, выполненные в виде двух 2соединительных фланцев 8, связанныхмежду собой через плоские пружины9 жесткими пластинами 10,С одним из соединительных фланцев8 с помощью шарнира 11 (фиг.3) связан цилиндр 12 пневмопривода линейного перемещения, шток 13 которогос помощью шарнира 14 связан с другимсоединительным фланцем 8. В качест 10 ве приводного устройства звена-модуля можно использовать любой изизвестных приводов:...
Модуль руки промышленного робота

Номер патента: 1757869
Опубликовано: 30.08.1992
Автор: Панкратов
МПК: B25J 11/00, B25J 9/08
Метки: модуль, промышленного, робота, руки
...21, 22, являются приводнь,ми, а звенья, состоящие из лент 23, 24 и 25, 26, образуют уравновешивающую кинематическую цепь,Внутренние концы лент 19, 25 и 20, 26 40 соединены соответственно с полумуфтами27, 28 шарнирной муфты, вращающимися одна относительно другой на подшипнике 29. Причем концы лент закреплены на полу- муфтах диаметрально противоположно 45 (фиг,2), что позволяет уравновешивать шарнирную муфту в любом положении при вращении корпуса 3 кисти относительно продольной оси руки, Аналогичным образом соединены ленты 21, 23 и 22, 24 с полумуф тами 30, 31, Обеспечивается поворот вала 5в противоположном направлении, Позицией 32 обозначен подшипник.В пределах величины осевого перемещения шарнирных муфт, определяемого уг лом поворота...
Соединительный модуль руки промышленного робота

Номер патента: 1491691
Опубликовано: 07.07.1989
Авторы: Джолдасбеков, Кайнарбеков, Слуцкий
МПК: B25J 19/00, B25J 9/08
Метки: модуль, промышленного, робота, руки, соединительный
...комбинат "Патент", г.ужгород, ул. Гагарина,101 Изобретение относится к машино - строению и может быть использовано в конструкциях промышленных роботов.Цель изобретения - расширение функциональных возможностей робота.На фиг. 1 дана схема модуля; на фиг. 2 - схема поворотного элемента,Соединительный модуль содержит фланцы 1, выполненные в виде отдельных звеньев, которые жестко соединяются со схватом 2 и с последним звеном 3 механической руки. К фланцам 1 крепятся соединительные планки 4 с продольными пазами 5. Между планками 4 установлен поворотный элемент 6. Он выполнен тоже с продольными пазами 5. Соединительный модуль снабжен зажимами 7, установленными в пазах 5. Поворотный элемент 6 выполнен из вала 8 и втулки 9,...
Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата

Номер патента: 919865
Опубликовано: 15.04.1982
Автор: Горбань
МПК: B25J 3/00
Метки: взаимно-перпендикулярных, вращения, губок, движения, захвата, осей, относительно, приводное, промышленного, робота, руки
...в себя вал 16, установленный в основании 1 захвата на подшипнике 7 и расположенный под углом к осиего вращения, зубчатое колесо 18 для соединения с двигателем 3. На валу 16 установлена управляемая муфта, состоящая из приводной полумуфты 19 и тормозной полумуфты 20, предназначенная для поочередногосоединения корпуса 2 захвата либо с валом16, либо с полой осью 21, жестко закрепленной на основании 1 захвата,На осях 6 и 21 могут быть установленыпозиционные датчики 22 и 23, кинематически связанные с основанием 1 захвата и корпусом 2 захвата,Блок управления движения корпуса 2захвата, связанным с губками захвата (начертеже не показано) по одной координате,например вращение относительно основания1 захвата, содержит генератор 24 импульсови...
Предыдущий патент: Механизм поворота манипулятора
Следующий патент: Станок для раскряжевки круглых лесоматериалов
Случайный патент: Устройство для обессоливания растворов