Система управления общим и циклическим углами установки лопастей подъемно-маршевого воздушного винта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1837034
Автор: Лепилкин


Текст
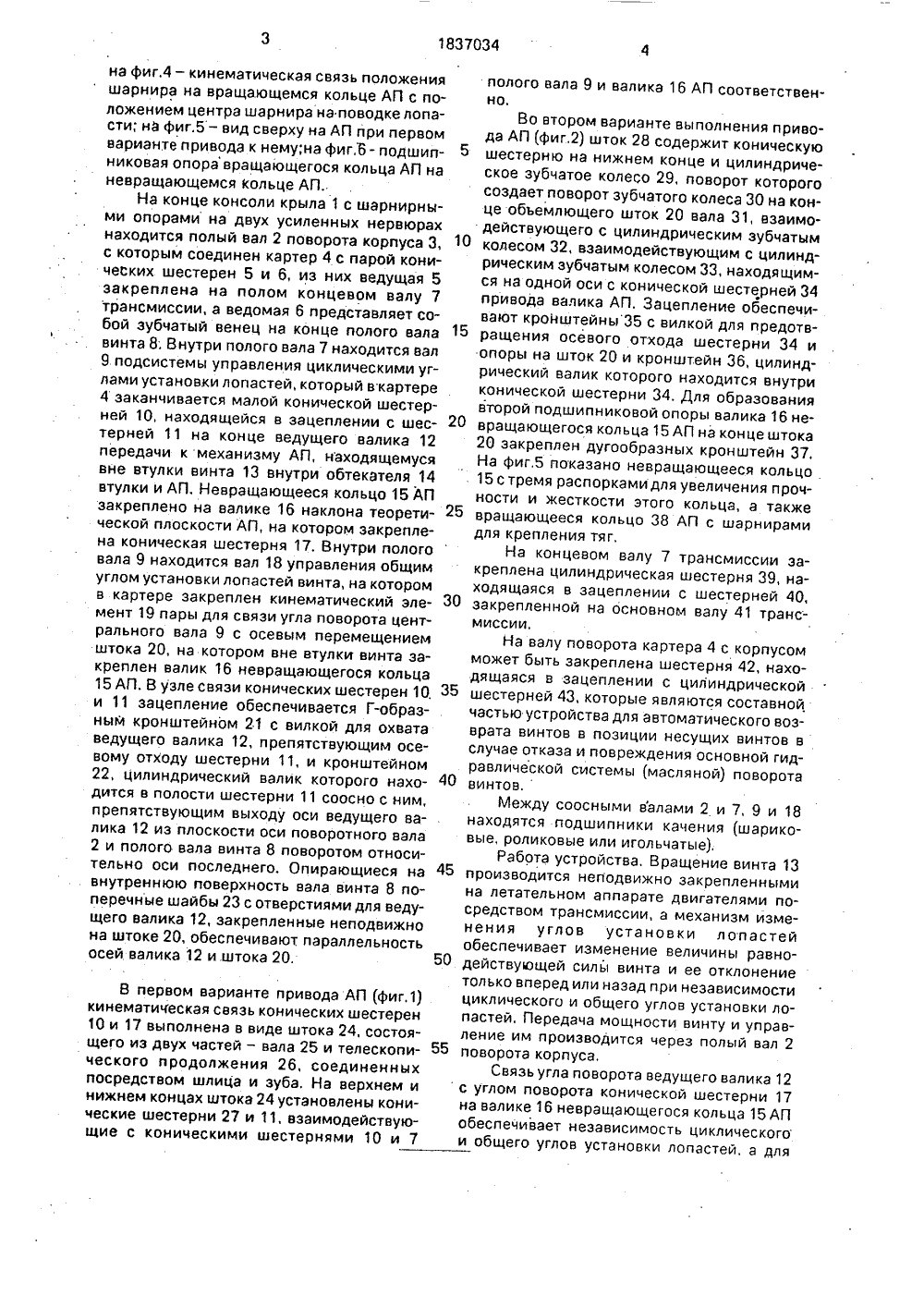
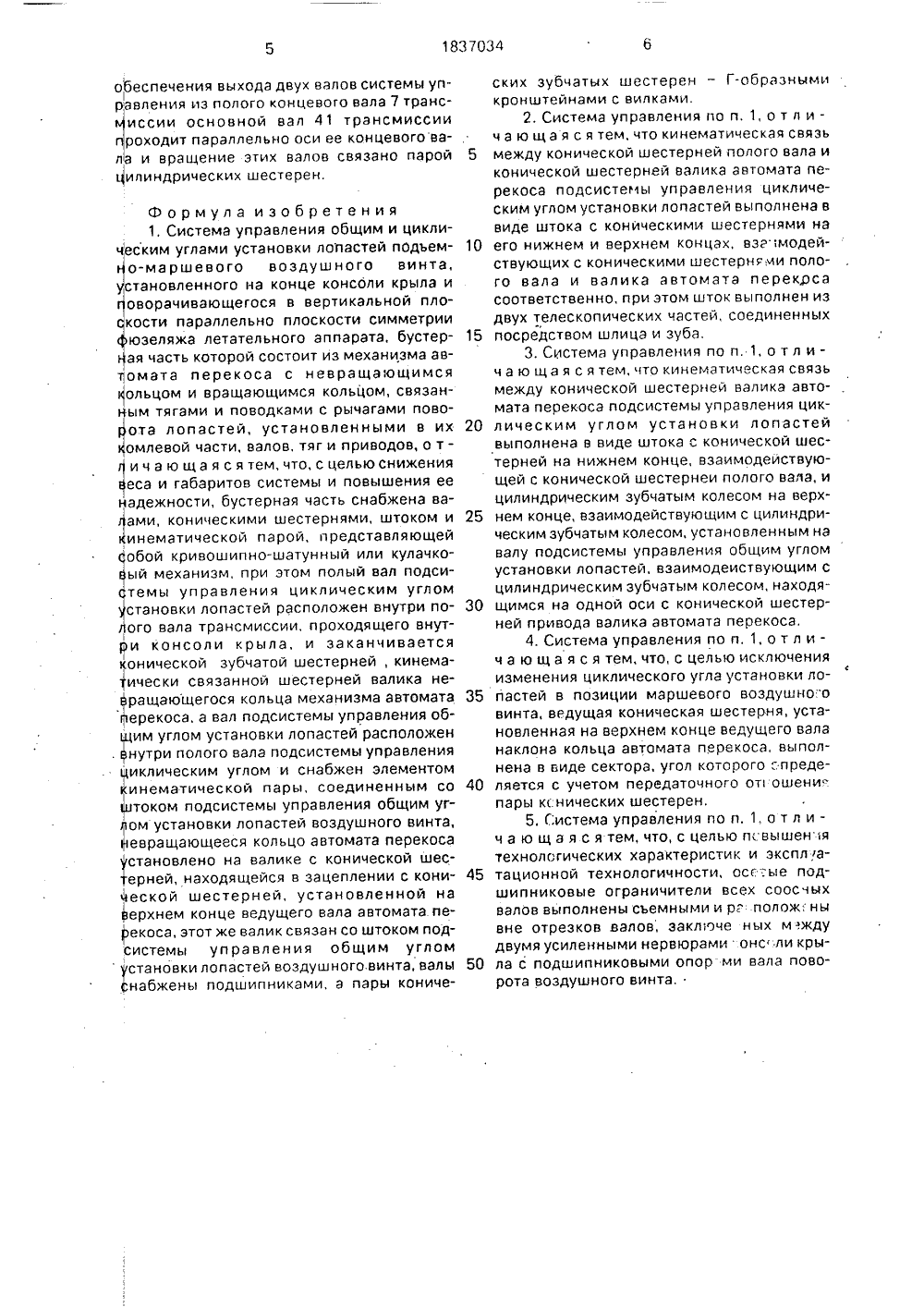
(56кл.ЦИК ся к области авиаия - снижение веи повышение ее лючение иэменеановки лопастей в ушного винта, а гических характеой технологично.ия содержит сна правленсостоящуюс невращмся кольцми с рычаленными стема у ю часть, перекоса ащающи поводка установ ов, тяг и правлен лопаст ст, Сибут.ерну автомата цом и вр тягами и лопастей части, вал ситемы таНовки из механизма ающимся кольом, связанным гэми поворота в их комлевой Полый вал подеским углом усожен внутри приводов ия цикли ей распо х характе- ологичноносится к областиачено для созданв с несущими вии по вертикали.ния является снижстемы и повышене исключение изла установки ловоздушного Изобретение от строения и преднаэн тательных аппарато дл взлета и посадкЦелью изобрете веса и габаритов си надежности, а такж ния циклического уг позиции маршевого ниетехнологически луатационной техн кже повыш стик и экс я ле- ами ст на концеорпусом в маршевоомата пеиг.3 - вид ого винта оказан вид сверху ла с поворотным к гда винт в позиции иг.2 - механизм авт2 формулы; на ф четырехлопастн На фиг.1 и вую часть кры положении, ко о винта; на ф рекоса (АП) по верху на втул ние пас вин в ку ГО УДАРСТВЕННОЕ ПАТЕНТНОЕВЕ ОМСТВО СССР(ГО ПАТЕНТ СССР)бп ОРСКОМУ СВИДЕТЕЛЬСТВУ 4805842/23 26,03.90 30,08.93. Бюл. М 32 А.М.Лепилкин Патент США М 4573873, 416-114, опублик. 1986. СИСТЕМА УПРАВЛЕНИЯ ОБЩИМ И ЛИЧЕСКИМ УГЛАМИ УСТАНОВКИ ЛОРШЕВОГО ВОЗ ПАСТЕИ ПОДЪЕМНО-МА ДУ НОГО ВИНТА (57 Изобретение относит ст оения. Цель изобретенаи габаритов системы нежности, а также иск ни циклического угла уст по иции маршевого воэд та же повышение техноло ри тик и эксплуатационн полого вала трансмиссии, проходящего внутри консоли крыла, и заканчивается конической зубчатой шестерней, кинематически связанной с конической шестерней валика невращающегося кольца механизма автомата перекоса. Вал подсистемы управления общим углом установки лопастей расположен внутри полого вала подсистемы управления циклическим углом и снабжен элементом кинематической пары, соединенным со штоком подсистемы управления общим углом установки лопастей воздушного винта. Невращающееся кольцо автомата перекоса установлено на валике с конической шестерней, находящейся в зацеплении с конической шестерней, установленной на верхнем конце ведущего вала автомата перекоса, этот же валик связан со штоком подсистемы управления общим углом установки лопастей воздушного винта, Валы сообщены подшипниками, пары конических зубчатых шестерен снабжены Г-образными кронштейнами с вилками.Имеются варианты выполнения кинематической связи между конической шестернейюаай полого вала и конической шестерней валика автомата перекоса. 4 з,п. ф-лы, 6 ил.Ына фиг,4 - кинемэтическая связь положения шарнира на вращающемся кольце АП с положением центра шарнира на поводке лопасти; нЭ фиг.5 - вид сверху на АП при первом варианте привода к нему;на фигЗ - подшипниковая опора вращающегося кольца АП на невращающемся Кольце АП.На конце консоли крыла 1 с шарнирными опорами на двух усиленных нервюрах находится полый вал 2 поворота корпуса 3, с которым соединен картер 4 с парой конических шестерен 5 и 6, из них ведущая 5 закреплена на полом концевом валу 7 трансмиссии, а ведомая 6 представляет собой зубчатый венец на конце полого вала винта 8; Внутри полого вала 7 находится вал 9 подсистемы управления циклическими углами установки лопастей, который в картере 4 заканчивается малой конической шестерней 10, находящейся в зацеплении с шестерней 11 на конце ведущего валика 12 передачи к механизму АП, находящемуся вне втулки винта 13 внутри обтекателя 14 втулки и АП. Невращающееся кольцо 15 АП закреплено на валике 16 наклона теоретической плоскости АП, на котором закреплена коническая шестерня 17, Внутри полого вала 9 находится вал 18 управления общим углом установки лопастей винта, на котором в картере закреплен кинематический элемент 19 пары для связи угла поворота центрального вала 9 с осевым перемещением штока 20, на котором вне втулки винта закреплен валик 16 неврэщающегося кольца 15 АП. В узле связи конических шестерен 10, и 11 зацепление обеспечивается Г-образным кронштейном 21 с вилкой для охвата ведущего валика 12, препятствующим осевому отходу шестерни 11, и кронштейном 22, цилиндрический валик которого находится в полости шестерни 11 соосно с ним, препятствующим выходу оси ведущего валика 12 из плоскости оси поворотного вала 2 и полого вала винта 8 поворотом относительно оси последнего. Опирающиеся на внутреннюю поверхность вала винта 8 поперечные шайбы 23 с отверстиями для ведущего валика 12, закрепленные неподвижно на штоке 20, обеспечивают. параллельность осей валика 12 и штока 20. В первом варианте привода АП (фиг.1) кинемэтическая связь конических шестерен 10 и 17 выполнена в виде штока 24, состоящего из двух частей - вала 25 и телескопического продолжения 26, соединенных посредством шлицэ и зуба. На верхнем и нижнем концах штока 24 установлены конические шестерни 27 и 11, взаимодействующие с коническими шестернями 10 и 7 полого вала 9 и валика 16 АП соответственно.Во втором варианте выполнения привода АП (фиг,2) шток 28 содержит коническую5 шестерню на нижнем конце и цилиндрическое зубчатое колесо 29, поворот которогосоздает поворот зубчатого колеса 30 нэ конце объемлющего шток 20 вала 31, взаимодействующего с цилиндрическим зубчатым10 колесом 32, взаимодействующим с цилиндрическим зубчатым колесом 33, находящимся на одной оси с конической шестерней 34привода валика АП. Зацепление обеспечивают кронштейны 35 с вилкой для предотв 15 ращения осевого отхода шестерни 34 иопоры на шток 20 и кронштейн 36, цилиндрический валик которого находится внутриконической шестерни 34. Для образованиявторой подшипниковой опоры валика 16 не 20 вращающегося кольца 15 АП нэ конце штока20 закреплен дугообразных кронштейн 37.На фиг,5 показано невращающееся кольцо15 с тремя распорками для увеличения прочности и жесткости этого кольца, а также25 вращающееся кольцо 38 АП с шарнирамидля крепления тягНа концевом валу 7 трансмиссии закреплена цилиндрическая шестерня 39, находящаяся в зацеплении с шестерней 40,30 закрепленной на основном валу 41 транс- миссии,На валу поворота картера 4 с корпусомможет быть закреплена шестерня 42, находящаяся в зацеплении с цилиндрической35 шестерней 43, которые являются составнойчастью устройства для автоматического возврата винтов в позиции несущих винтов вслучае отказа и повреждения основной гидравлической системы (масляной) поворота40 винтов.Между соосными валами 2 и 7, 9 и 18находятся подшипники качения (шариковые, роликовые или игольчатые).Работа устройства, Вращение винта 1345 производится неподвижно закрепленныминэ летательном аппарате двигателями посредством трансмиссии, а механизм изменения углов установки лопастейобеспечивает изменение величины равно 50 действующей силы винта и ее отклонениетолько вперед или назад при независимостициклического и общего углов установки лопастей, Передача мощности винту и управление им производится через полый вал 255 поворота корпуса,Связь угла поворота ведущего валика 12с углом поворота конической шестерни 17на валике 16 невращэющегося кольца 15 АПобеспечивает независимость циклическогои общего углов установки лопастей, а дляобеспечения выхода двух валов системы упдавления из полого концевого вала 7 трансьиссии основной вал 41 трансмиссии п)роходит параллельно оси ее концевого вала и вращение этих валов связано парой Цилиндрических шестерен. Формула изобретения 1. Система управления общим и циклическим углами установки лопастей подъемо-маршевого воздушного винта, 1 становленного на конце консоли крыла иоворачивающегося в вертикальной плокости параллельно плоскости симметрии юзеляжа летательного аппарата, бустерая часть которой состоит из механизма автомата перекоса с невращающимся кольцом и вращающимся кольцом, связаным тягами и поводками с рычагами повоота лопастей, установленными в их комлевой части, валов, тяг и приводов, о т - г и ч а ю щ а я с я тем, что, с целью снижения илеса и габаритов системы и повышения ее надежности, бустерная часть снабжена валами, коническими шестернями, штоком и 1инематической парой, представляющей обой кривошипно-шатунный или кулачкоый механизм, при этом полый вал подсистемы управления циклическим углом /становки лопастей расположен внутри полого вала трансмиссии, проходящего внутри консоли крыла, и заканчивается конической зубчатой шестерней, кинематически связанной шестерней валика неращающегося кольца механизма автомата перекоса, а вал подсистемы управления обим углом установки лопастей расположен нутри полого вала подсистемы управления ииклическим углом и снабжен элементом кинематической пары, соединенным со итоком подсистемы управления общим углом установки лопастей воздушного винта, невращающееся кольцо автомата перекоса становлено на валике с конической шесерней, находящейся в зацеплении с конической шестерней, установленной на ерхнем конце ведущего вала автомата пеекоса, этот же валик связан со штоком подсистемы уп равления общим угломстановки лопастей воздушного винта, валы снабжены подшипниками, а пары конических зубчатых шестерен - Г-образнымикронштейнами с вилками,2, Система управления по п, 1, о т л и -ч а ю щ а я с я тем, что кинематическая связь5 между конической шестерней полого вала иконической шестерней валика автомата перекоса подсистемы управления циклическим углом установки лопастей выполнена ввиде штока с коническими шестернями на10 его нижнем и верхнем концах, взгмодействующих с коническими шестернями полого вала и валика автомата перекрсасоответственно, при этом шток выполнен издвух телескопических частей, соединенных15 посредством шлица и зуба,3. Система управления по и, 1, о т л ич а ю щ а я с я тем, что кинематическая связьмежду конической шестерней валика автомата перекоса подсистемы управления цик 20 лическим углом установки лопастейвыполнена в виде штока с конической шестерней на нижнем конце, вэаимодеиствующей с конической шестернеи полого вала, ицилиндрическим зубчатым колесом на верх 25 нем конце, взаимодействующим с цилиндрическим зубчатым колесом, установленным навалу подсистемы управления общим угломустановки лопастей, взаимодеиствующим сцилиндрическим зубчатым колесом, находя 30 щимся на одной оси с конической шестерней привода валика автомата перекоса,4. Система управления по и. 1, о т л ич а ю щ а я с я тем, что, с целью исключенияизменения циклического угла установки ло 35 пастей в позиции маршевого воздушно-овинта, ведущая коническая шестерня, установленная на верхнем конце ведущего валанаклона кольца автомата перекоса, выполнена в виде сектора, угол которого .".преде 40 ляется с учетом передаточного от ошени.пары конических шестерен.5. Система управления по и. 1, о т л ич а ю щ а я с я тем, что, с целью повышен ятехнологических характеристик и экспл а 45 тационной технологичности, осе-.ые подшипниковые ограничители всех соосчыхвалов выполнены съемными и ра полож: нывне отрезков валов, заключе ных междудвумя усиленными нервюрами онс ли кры 50 ла с подшипниковыми опор ми вала поворота воздушного винта.1837034 27 оставитель Л,Кирийехред М.Моргентал Корректор С.Пека лаков еда кто Заказ 2853 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГК 113035, Москва, Ж, Раушская наб., 4/5 оизводственно-издательский комбинат "Патент", г, Ужгород, ул, Гагарина, 101
СмотретьЗаявка
4805842, 26.03.1990
ЛЕПИЛКИН АДРИАН МЕРКУРЬЕВИЧ
МПК / Метки
МПК: B64C 27/72
Метки: винта, воздушного, лопастей, общим, подъемно-маршевого, углами, установки, циклическим
Опубликовано: 30.08.1993
Код ссылки
<a href="https://patents.su/6-1837034-sistema-upravleniya-obshhim-i-ciklicheskim-uglami-ustanovki-lopastejj-podemno-marshevogo-vozdushnogo-vinta.html" target="_blank" rel="follow" title="База патентов СССР">Система управления общим и циклическим углами установки лопастей подъемно-маршевого воздушного винта</a>
Приспособление для проточки ступенчатых и конических деталей на многошпиндельных автоматах

Номер патента: 149009
Опубликовано: 01.01.1962
Автор: Семинский
МПК: B23B 5/38
Метки: автоматах, конических, многошпиндельных, проточки, ступенчатых
...в ползунке 2 резцедержателя, двигаясь по копиру 4, закрепленному на стойке 3, под действием пружины, прижимающей щуп к копиру, перемещается с одной на другую ступеньки, форму которых копирует резец на детали. Во время движения щупа б собачка б скользит по копиру. После окончания обточки щуп переместится на послед Л"о 149009шою ступень копира и резец отойдет от детали на величину глубины последней ступени копира. В это время собачка посредством пружины установится в крайнее левое положение. После обработки детали, когда барабан станка движется в обратном направлении, ползун 2 резце- держателя движется вместе со стойкой д и копиром 4. Резец проходит над деталью, не затрагивая ее. Когда упорная планка 9, прикрепленная к стойке 3, упрется...
Пневмогидравлический механизм для автоматического изменения шага воздушного винта и для установки его лопастей по потоку

Номер патента: 69044
Опубликовано: 01.01.1947
Автор: Бас-Дубов
МПК: B64C 11/06, B64C 11/38
Метки: винта, воздушного, изменения, лопастей, механизм, пневмогидравлический, потоку, установки, шага
...повернуть пробку крана 9 на 180. В этом случае на увеличение шага масло будет идти по магисрапи 7, каналу 14, прорезанному на наруной пове 1 хности пробки крана, трубопроводу 4, и слив - по магистрали б, каналу 15 прооки крапа и трубопроводу 5 1 ерез золотник регулятора в картер двпгатепяПри первом положении пробки крана (изоб,ке), регулятор 8 будет увеличивать шаг при уве раженном на чертеличении числа обг,Го ЯО 44 Предмет изобретения ПневмОГлр 2 Влический механизх 1 д,151 азтоматическо 0 изснеи 51 шага воздушного винта и для установки его лоастей по ютоку, о т. л и ч а ю ш, и й с я тем, что для перевода винта на режим реверса и обратно при постоянном числе его оборотов применен кра-переключа" Бь, мон ирОВяыЙ Б кор 5 се 1 еГулятор 2...
Установка для изготовления крупногабаритных цилиндрических и конических сварных изделий

Номер патента: 749604
Опубликовано: 23.07.1980
Авторы: Левин, Малышев, Мочалов, Сиднев, Эпштейн
МПК: B23K 37/00
Метки: конических, крупногабаритных, сварных, цилиндрических
...25 с устройством, установленным на центральной колонне, например лазерным 26,для проверки горизонтальности верхнейкромки обечайки 27, а также крытой галлереей 28 для перехода внутрь установки кпульту управления и на внутренние монтажные площадки лестничными маршами 29,расположенными на тележках, для подъемана наружные монтажные площадки, трапами 30 и 31 для подъема к пульту управленияи непосредственно на внутренние монтажныеплощадки и кроме этого, раздвижной лестницей 32, установленной на одной из наружных монтажных площадок для подъема нараспорное кольцо 33 с целью строповки секции.Кроме того, установка имеет устройстводля замера диаметра расстановки тележек,ограждения, систему блокировки и т, д. (на чертеже не...
Устройство для гашения вибраций лопастей несущего винта вертолета

Номер патента: 1792078
Опубликовано: 20.09.1995
Авторы: Воронков, Ганюшкин, Соболь
МПК: B64C 27/32
Метки: вертолета, вибраций, винта, гашения, лопастей, несущего
...от центра жесткости лопасти, и с осями качания; установленными в кронштейне на комле лопасти под острым отрицательным углом к хорде лопасти, маятники установлены на автономных осях качания.На фиг.1 показан вид сверХу на комлевую часть лопасти с установленйым устройством для гашения вибраций лопастей несущего винта вертолета; на фиг,2 - устройство на лопасти при аиде с комля (повернуто на 90 против часовой стрелки),На лопасти 1 с осью жесткости сечении2 с помощью кронштейна 3 установлено устройство гашения вибраций, В кронштейне установлены автономные валики 4 и 5, реа лизующие автономные оси качания, на которых, соответственно, расположены рычаги 6 и 7, на рычагах - грузы (маятники) 8 и 9. На кронштейне имеются упоры 10 и 11 для...
Механизм принудительного поворота лопастей пропеллера с помощью гидравлической передачи

Номер патента: 63096
Опубликовано: 01.01.1944
Автор: Булычев
МПК: B64C 11/42
Метки: гидравлической, лопастей, механизм, передачи, поворота, помощью, принудительного, пропеллера
...передачи, навернутую на многозаходныи винт 5 большого шага. Винт 5 жестко соединен с конической шестерней 4, сцепленной с коническими шестернями 3,3, монтированными на комлях лопастей 1,1 пропеллера. Вал 2 пропеллера получает вращение обычным способом от коленчатого вала мотора через редуктор, состоящий из шестерен 11 и 13 (фиг. 1).С валом 2 пропеллера при помощи шестерен 11 и 9 соединена шестеренная масленая помпа 8, подающая под давлением масло в цилиндр 7 по трубопроводу 10.Устанавливая в определенное положение рукоятку 15 управления, связанную с регулятором давления, подают масло под определенным давлением в цилиндр 7, что заставляет перемещаться влево поршень 12. Последний перемещает гайку 6, которая сообщает вращение винту....
Предыдущий патент: Вертолетный автопилот
Следующий патент: Несущая система летательного аппарата вертикального взлета и посадки
Случайный патент: Сепаратор рабочей клети стана холодной прокатки труб роликами